1引言
隨著計算機技術和網絡技術的發展,各種新型的控制方式應用于機器人控制。分布式控制系統是在計算機監督控制系統、直接數字控制系統和計算機多級控制
2010-12-03 11:02:43 1632
1632 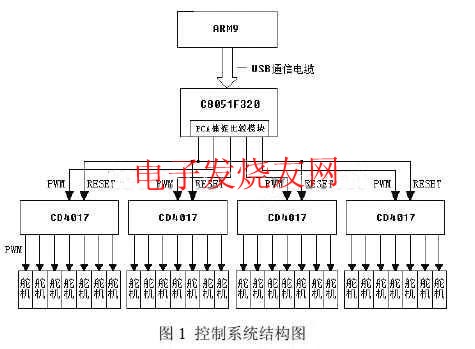
仿人機器人一直是自動控制領域研究的熱點。在模仿人類進行邁步行走時,由于仿人機器人的重心經常要處于中心線以外的區域,使得它的身體很難保持站姿平衡,能夠穩定地實現雙足行走是仿人機器人研究的重點也是難點。
2011-01-23 16:42:371989 
提出一種DSP 通過EMIF 接口控制復雜系統的方案。通過將DSP 芯片連接多片FPGA,并利用FPGA 與各種外部芯片連接,使得DSP 通過EMIF 接口就能控制各種芯片,實現復雜系統的控制。這樣節省DSP 的引腳資源,使DSP 的運算功能得以更充分的發揮。
2013-06-13 15:55:576535 
仿人機器人具有可移動性,具有很多的自由度,包括雙臂、頸部、腰部、雙腿等,可以完成更復雜的任務,這些關節要連接在一起,進行統一的協調控制,就對控制系統的可靠性、實時性提出了更高的要求,以往采用
2014-11-18 11:40:571863 
DSP+FPGA+AD控制系統,FPGA負責AD7606的采集,將電機參數采集后,傳輸至DSP ,DSP將數據進行變換后輸出PWM進而控制電機的轉速。DSP采用TI公司的TMS320F28335
2016-07-18 16:59:22
積分作用從某種意義上來說是人的記憶功能的模擬。對人而言,記憶功能具有某種選擇性;在控制中,人總是有選擇地記憶有用的信息而不記憶無用的信息。根據這一發現,周其鑒于1983年提出了著名的仿人智能積分控制
2020-11-23 08:48:02
傳感器技術是仿人機器人研究的關鍵技術之一。仿人機器人之所以能在已知或未知的環境中完成一定的作業功能,是因為它能夠通過傳感器感知外部環境信息和自身狀態,獲得反饋信息,實現系統的閉環控制。目前在仿人機
2019-09-18 06:17:46
35%,而目前太陽能利用轉化率約為10%~20%。因此,研究了現有太陽跟蹤器的原理,并結合上海機器人與信息處理研究所的相關課題,開展研究設計了一種基于DSP的技術經濟性好的太陽跟蹤控制系統。在對
2015-11-06 10:01:47
申請理由:作為電子突出的杭州電子科技大學,由于項目需要,對國家級項目,機器人實現控制。主要通過使用DSP,STM32,FPGA三者協調,來實現對機器人實現軌跡規劃與速度規劃。項目描述:DSP在此
2015-11-02 11:18:53
相對直流電機更為困難。而 DSP 的應用使得交流電機控制系統無論是在結構復雜程度、成本和效率上都有很大改觀。本文結合了交流感應電機的速度控制中較為有效的控制方法即磁場導向控制(FOC)理論和 TI 公司的 DSP 控制器 TMS320LF2407 介紹了 DSP 在電機閉環控制中的應用。
2019-12-25 18:40:32
什么是機器人控制系統?機器人的運動控制系統包含哪些方面?機器人控制系統的基本功能有哪些?
2021-10-11 09:38:12
關于伺服電機控制及結合強弱電的控制系統你想知道的都在這
2021-09-30 07:44:17
什么是機器人控制系統?機器人的運動控制系統包含哪些方面?機器人控制系統的基本功能有哪些?
2021-07-05 07:08:47
會受一定的影響。?本文所提出的基于DSP+FPGA的控制系統方案,利用FPGA的容量大、可編程實現很多功能,結合DSP具有高速的信息處理能力的特點,使得本控制系統非常簡潔,結構靈活,通用性強,系統也易于維護和擴展。該方案基于軟件無線電的思想,是采用通用平臺的設計。?
2019-07-29 06:08:47
題目:基于DSP的智能交通控制系統
2014-05-24 11:32:12
什么是電磁干擾?基于DSP的電動機控制系統硬件的電磁兼容該如何去設計?基于DSP的電動機控制系統軟件的電磁兼容該如何去設計?
2021-08-18 07:29:45
先進的馬達控制系統可實現馬達與硅芯片技術以及軟件的高度集成,以便在提升性能的同時顯著節約成本。先進控制器采用的高級技術可提高性能與馬達驅動的工作特性。基于數字信號處理器 (DSP) 的新型可編程
2012-11-28 15:36:19
的接口不斷掃描,將數據送到顯示屏顯示。同時FPGA連接鍵盤接口,通過掃描法掃描鍵值,之后通過中斷方式送到DSP,使DSP對各種輸入進行控制。整個系統的結構圖如圖1所示。
2019-07-03 08:08:33
研究了一種用FPGA技術實現三輪全方位移動機器人運動控制系統的方法,與雙DSP結構,DSP+CPLD結構,以及DSP+專用集成電路結構等相比,該方法具有簡單可靠,擴展性強等特點。且FPGA設計簡單,使用方便,開發周期短,能夠實現真正的SOPC系統。
2019-10-22 07:35:19
摘要:為提高家用雙缸洗衣機控制系統的性能,改善定時精確度和洗滌效果,基于可編程性強的FPGA設計了一種用于洗衣機的控制系統,并進行了時序仿真。通過實驗時設計方案進行了完善,得到了可進行數字化控制
2019-06-18 06:37:08
請教各位,基于FPGA的硬件控制系統該如何去設計?
2021-04-28 07:01:25
研究的前沿,它在一定程度上代表了一個國家的高科技發展水平。運動控制系統是機器人控制技術的核心,也是機器人研究領域的關鍵技術之一,在機器人控制中具有舉足輕重的地位,因此,各研究機構都把對機器人運動控制系統的研究作為首要任務。
2020-08-19 06:57:09
樹莓派和其他機器人的控制器有何不同?如何使用樹莓派開發智能機器人控制系統?
2021-12-23 06:55:02
本文結合DNC技術的發展趨勢,設計了一套基于ARM和DSP的嵌入式數控機床控制系統。
2021-04-25 09:18:18
隨著人口老齡化進程的加快,更多老年人,尤其是地震和疾病致殘的殘疾人,都需要照顧。基于此,這里提出一種基于ARM的嵌入式服務機器人控制系統設計。該服務機器人的控制系統是機器人的神經中樞,因而其設計是機器人研究的核心。該控制系統通常以MCU、 DSP等為核心,采用上、下位機二級分布式結構。
2019-10-15 08:03:16
最近在看工業機器人的資料,想知道現在的一些市面上的工業機器人上用的控制控制系統都有哪些廠商呀?
2015-01-23 12:04:01
怎么設計一個基于FPGA的磁浮軸承控制系統?
2021-04-30 06:30:53
變流器系統。控制系統平臺采用主頻300 MHz的DSP芯片與FPGA共同控制,大大提高了系統的穩定性以及實時性。控制系統采用矢量控制技術和功率閉環的變速控制策略。最后在自主研發的2 MW雙饋式風電變流器的樣機上進行了實驗和現場試運行,驗證了控制系統的可靠性。
2019-09-04 07:51:43
什么是機器人控制系統?機器人的運動控制系統包含哪些方面?機器人控制系統的基本功能有哪些?
2021-06-30 06:37:34
本帖最后由 峩、那么可笑 于 2014-12-25 14:12 編輯
本次設計中采用的 DSP 控制步進電動機的原理和方法可以用來進一步的開發基于DSP 的多電動機控制系統,設計中 DSP
2014-11-05 14:39:34
本次設計中采用的 DSP 控制步進電動機的原理和方法可以用來進一步的開發基于DSP 的多電動機控制系統,設計中 DSP 的外圍電路例如復位電路,外部存儲器,JTAG仿真等等設計可以直接使用在多電動機
2014-10-30 13:57:14
CRT工業運動控制系統,其硬件結構基于高性能 DSP 為控制核心、FPGA 協處理,插補算法、脈沖信號產生及直線曲線加減速控制、I/O 信號的檢測處理。DMC600M系列3~6軸運動控制系統
2022-02-26 16:26:24
摘要:論述了嵌人式操作系統DSP/Blos 在隨機振動控制系統中的應用。首先簡單介紹了隨機振動控制系統和嵌人式操作系統,接著提出了采用DSPJ產Bl仍來構建隨機振動控制系統的DSp軟
2009-01-11 11:57:58 26
26 本文提出了一種以ARM9 為主控制器的新型的仿人機器人分布式控制系統。單片機和外部計數器組成關節控制器。主控制器和關節控制器之間采用USB 通信。從而實現了控制系統的小型
2009-05-25 15:57:4445 本文采用了無線射頻識別技術、紅外線距離傳感技術和地磁感應電子羅盤相結合的方法,設計出了一種基于DSP 控制的信息融合的自主移動的機器人的導航與控制系統。并且在設計
2009-05-27 15:31:0415 應用仿人智能魯棒性高、能對付難控對象的控制特點,結合模糊RBF 神經網絡控制技術,提出仿人模糊神經網絡控制方法,對PID 控制器參數進行優化調節。該方法采用仿人智能的
2009-06-09 10:47:3617 論述了由嵌入式計算機組成的3 層仿人機器人控制系統,并詳細介紹了其中的關節控制器。控制系統實行逐級控制,任務分散,提高了機器人的智能化程度。關節控制器選用TM320F2811
2009-08-05 10:51:4424 本文介紹了電視導引頭跟蹤控制系統的工作原理和組成。通過利用基于FPGA 的現代DSP設計方法,對信號處理電路進行系統模型設計,功能、時序仿真。最后通過對目標信號的現場
2009-08-05 15:05:4924 本文在基于人工生命的智能控制系統、仿人控制系統、人工情感的研究的基礎上,結合本人多年研究的現場總線型智能控制系統的經驗,提出了擬人控制系統的概念。進而對擬人
2009-08-29 11:07:1915 論述了嵌人式操作系統DSP/Blos 在隨機振動控制系統中的應用。首先簡單介紹了隨機振動控制系統和嵌人式操作系統,接著提出了采用DSPJ產Bl仍來構建隨機振動控制系統的DSp軟件,然
2009-12-04 11:32:2816 設計了基于TMS320LF2407 DSP 的脈沖電源控制系統。介紹脈沖電源原理及控制系統的軟硬件設計,完成了對該系統的仿真,并對系統進行了遠程監控。
2009-12-18 12:16:0042 應用仿人智能魯棒性高、能對付難控對象的控制特點,結合模糊RBF 神經網絡控制技術,提出仿人模糊神經網絡控制方法,對PID 控制器參數進行優化調節。該方法采用仿人智能的
2009-12-19 11:50:0312 本文介紹了一套基于 TMS320LF2407A DSP 的高性能通用控制系統平臺的設計。系統引入了模塊化的思想,根據需求設計功能模塊, 按照任務配置算法程序,設計控制系統的硬件電路和軟
2010-01-20 13:57:5925 為了滿足CNC齒輪測量中心的測量精要求,針對定點數字信號處理器(DSP)TMS320LF2407A的特點,設計一種以DSP運動控制為核心的運動控制系統。該系統通過DSP內部集成的A/D轉換模塊對傳
2010-02-11 12:23:3379 基于多DSP架構的電機控制系統
摘要:針對交流永磁同步電機(PMSM)的雙閉環反饋控制模型提出了多DSP架構的電機控制系統方案。該方案在電機控制算法分解的基礎
2010-03-12 15:04:5023 基于RTW 的DSP 控制系統研究
摘要 提出了一種基于RTW的TMS320F2812 DSP數字控制系統,基于模型的設計流程,實現了工程開發過程從算法設計到最終實現的所有開發階
2010-04-07 10:18:1737 本文采用了無線射頻識別技術、紅外線距離傳感技術和地磁感應電子羅盤相結合的方法,設計出了一種基于DSP控制的信息融合的自主移動的機器人的導航與控制系統。并且在設計的
2010-07-14 15:30:5923 針對TMs320F2812DSP在控制方面的優越性和光電經緯儀對控制系統的高度集成化需求,本文開發了一套DSP+FPGA結構的高性能的PWM全數字化控制系統。在此硬件平臺基礎上,設計了一種基于卡
2010-07-21 17:03:3217 DSP和FPGA組成的伺服控制系統能夠滿足復雜的控制算法要求。通過對TI公司的DSP控制芯片TMS320F2812和ALTERA公司的FPGA芯片EP1C3T144的功能和特點分析,給出了一種基于DSP和FPGA的光電經緯儀
2010-11-11 15:57:5635 基于DSP的數字存儲示波器顯示控制系統的設計
一種基于DSP的數字存儲示波器顯示控制系統的設計方案。該系統主要由主機接口電路、數據處理電路及顯示
2008-12-03 20:50:44858 
基于CAN總線和雙傳感器仿人機器人運動控制系統研究
機器人研究是自動化領域最復雜。最具挑戰性的課題,它集機械。電子。計算機。材料。傳感
2009-10-10 08:57:291046 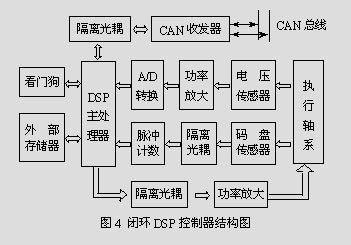
基于DSP仿人機器人關節控制器設計
0 引 言 仿人機器人具有可移動性,具有很多的自由度,包括雙臂、頸部、腰部、雙腿等,可以完成更復雜的任務,
2009-11-24 09:36:491515 
一種基于DSP+FPGA的控制系統方案設計
一、前言 ?
本文提到的控制系統控制通信設備的正常工作,是整個通信設備的重要組成部分。該控制系統要實現的功能
2009-12-22 17:44:411134 
摘要:文章介紹了一種新型的基于高速數字信號處理器(DSP),以永磁同步電動機(PMSM)為驅動部件的飛行仿真轉臺控制系統的原理及構成,并介紹了控制系統的硬件和軟件結構。給出了一些實驗結果。 關鍵詞:數字信號處理器(DSP) 伺服系統 永磁同步電動機
2011-02-27 15:38:0789 摘 要:基于機器人復雜的決策控制和步態管理,采用了個人數字助理(PDA)和數字信號處理器(DSP)組合,并以Windows Mobile作為軟件平臺。具體分析了控制系統的硬件設計和軟件設計方法。真實環境中的實驗及比賽結果證明,該控制系統可以實現機器人的復雜控制。 關鍵
2011-03-01 00:40:0460 介紹了利用語音識別和無線傳輸技術實現對多自由度假手的遠程語音控制系統。用該語音控制系統彌補了基于肌電信號(EMG)和腦電信號(EEG)控制系統的不足。從而使多自由度假手進一步滿
2011-10-10 16:24:4643 針對石油測井儀器須將地下傳感器發送的不同數量級信號進行識別并恢復原始數值,從而方便地面分析地下情況,本文介紹了一種基于FPGA和DSP的石油測井控制系統的軟硬件設計與實現的
2013-04-27 16:36:3334 提出了一種基于DSP和FPGA 的通用型運動控制系統!大大降低了系統成本
2013-09-23 17:49:3759 基于DSP的清洗機器人模糊控制系統研究2008。
2016-04-05 10:30:1214 FPGA在變頻控制系統中的應用,下來看看
2016-04-13 16:12:114 基于DSP的SVPWM變頻壓力閉環控制系統
2016-04-15 18:29:1615 基于DSP的SVPWM矢量控制系統的研究
2016-04-15 18:29:1624 基于DSP的SVPWM異步電機控制系統研究
2016-04-15 18:29:1613 基于DSP的異步電機SVPWM變頻調速控制系統。
2016-04-18 09:47:4913 基于DSP的永磁同步電機交流伺服控制系統
2016-04-18 09:47:4928 基于DSP的伺服控制系統設計與實現,有興趣的同學可以下載學習
2016-04-26 18:16:4241 采用DSP和FPGA直驅閥用音圈電機驅動控制系統。
2016-05-04 14:37:0119 仿人型機器人由于具有類人的基本外形,在實際的生活中,能夠代替人完成很多工作,因此對仿人型機器人的研究具有實用價值,各國都在投入巨大的人力物力進行研發。
2016-11-08 15:50:263713 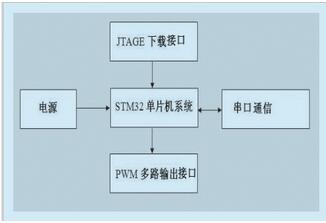
一種基于DSP_FPGA的輔助逆變器核心控制系統_吳瑕杰
2017-01-08 11:44:060 基于DSP的直流位置伺服控制系統
2017-02-08 02:01:2424 基于DSP的電動助力控制系統_張彤
2017-03-19 11:45:231 特有的機械結構和數學模型,建立一個新型全數字的基于DSP和FPGA的機器人位置伺服控制系統的軟、硬件平臺,實現對四關節實驗室機器人的精確控制。
2017-09-01 11:25:4411 基于TEDSPC5409 I型DSP實驗系統和CCS2.0軟件,采用DSP與單片機相結合的方式控制LCD,設計并實現了LCD顯示控制系統。系統中的DSP實現與單片機之間的并口通訊,單片機將DSP送來
2017-09-21 11:14:577 DSP的運動控制系統設計
2017-10-19 14:58:4212 基于DSP的步進電機控制系統設計
2017-10-19 15:42:5623 DSP控制系統中實時波形的捕獲與分析
2017-10-20 10:17:2111 DSP數字控制系統的電磁兼容設計
2017-10-20 15:46:173 說明如何將FPGA和與固定功能DSP結合起來使用,設計一個基于多普勒測量原理的非侵入式測量系統。 圖1:電子束聚集技術。 傳統上,大量的應用設計使用專門的數字信號處理(DSP)芯片或專用標準產品(ASSP)并通過信號處理算法來處理數字信息,濾波、視頻處
2017-10-23 11:33:120 的不斷發展,尤其是高速度數字信號處理器DSP 的出現,從根本上解決了嵌入式系統運算能力不足的問題,并為機器人運動控制系統的改進提供了新的途徑。該文正是從這一點出發, 選用控制能力很強的DSP芯片TMS320LF2407A作為機器人運
2017-10-23 14:36:282 的遠程傳送,使該仿人機器人系統具有腦電控制、語棄交互、游戲手柄交互、機器視覺與避障等功能。通過SSVEP 空閑狀態檢測實驗驗證了腦機接山系統異步控制的有效性。 2系統總體設計(System overall design ) SSVEP 是人腦視覺皮層對處于視覺中心的閃爍刺激的一種生物
2017-10-23 15:08:298 與方法研究成果;控制器采用雙CPU設計,將嵌入式技術與LonWorks總線技術有機結合在一起,可以實現模擬信號、開關信號及其脈沖信號的輸入、輸出,可與其它控制儀表實現RS- 232、USB、I.onWorks總線通訊;LON仿人思維控制器集成了獨有的仿人思維控制
2018-01-25 17:28:181 電力電子變換器控制系統一般是基于數字信號處理器或以DSP為主,現場可編程門陣列為輔的控制系統架構進行設計,但在一些實時性要求高、擴展性強的應用場合受到限制。而以FPGA為主進行設計的電力電子變換器
2018-01-29 11:46:395 控制系統的設計特點,建立了該廠單機自動電壓控制系統模型。為了提高動態調節性能指標,改善控制效果,提出了仿人智能電壓控制器和仿人智能無功控制器相結合的控制策略,來替代現場采用的電壓PID控制和機組無功非線性控制。通
2018-03-01 16:39:500 的機械結構進行了設計;對機器人控制系統進行了設計,提出了一種基于DSP+ FPCJA的主控系統,將多CPU協同工作、分布式遠程控制技術應用到仿人機器人行走控制中;利用人類行走過程中各關節的轉動參數為輸入的控制方法,在ADAMS上進行了步
2018-03-02 15:59:301 機器人的控制系統,就相當于人體的大腦,是機器人的核心組成部分。關于機器人的控制系統有哪些分類呢?機器人控制系統按其控制方式可分集中控制系統、主從控制系統及分散控制系統,下面為大家詳細講講這些系統。
2019-11-04 08:45:3328256 介紹了針對3/3相雙繞組感應發電機設計的勵磁系統,該系統由DSP和FPGA構成。給出了控制系統的接口電路和實驗結果。
2020-04-14 10:11:332744 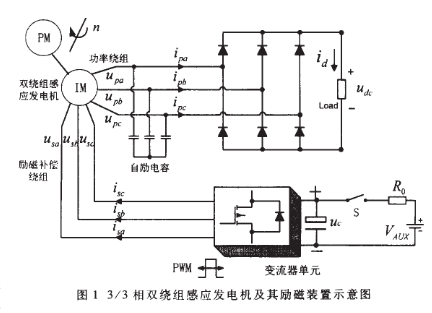
,它在一定程度上代表了一個國家的高科技發展水平。運動控制系統是機器人控制技術的核心,也是機器人研究領域的關鍵技術之一,在機器人控制中具有舉足輕重的地位,因此,各研究機構都把對機器人運動控制系統的研究作為首要任務。
2021-04-13 13:58:482841 
一種基于DSP與USB總線的新型開放式移動機器人控制系統,其機器人以PC為上位計算機,用一塊DSP運動控制卡對杋器人的兩個步進電杋進行控制。并釆用USB總線進行上下位機之間的通訊,很好地實現了機器人
2021-04-26 16:35:5121 門禁控制系統得到日益廣泛的應用 不斷提高門禁系統的安全性成為研究的重要課題本課題在對現在門禁系統及安全技術進行分析的基礎上研究了基于DSP 的門禁控制系統及其安全技術在指紋識別和防尾隨控制方法等方面開展了較為深入的研究。
2021-04-27 09:47:2013 基于ARM和DSP的諧波實時閉環控制系統
2021-06-15 11:26:1225 電子發燒友網站提供《多自由度仿生假手嵌入式控制系統及其抓取策略.pdf》資料免費下載
2023-10-10 11:18:381 電子發燒友網站提供《基于SSVEP仿人機器人異步腦機接口控制系統.pdf》資料免費下載
2023-11-03 09:34:520
 電子發燒友App
電子發燒友App














 工商網監
工商網監
評論