文章根據(jù)飛行模擬器的結構特點,分析了現(xiàn)場總線技術和FPGA技術的發(fā)展,根據(jù)飛行模擬器的實際需要和總線自身特點,選用了CAN總線來作為主機和現(xiàn)場設備的通信方式,并使用FPGA作為CAN總線節(jié)點結構中的核心處理器,對飛行模擬器通信接口進行了設計。
2014-05-15 11:12:23 3150
3150 汽車CAN總線設計規(guī)范對于CAN節(jié)點的波特率容忍度有著嚴格的規(guī)定,每個節(jié)點都必須具備一定的波特率容忍度,才能使節(jié)點組合到一起后,實現(xiàn)較好的通信性能,不至于很容易就出現(xiàn)總線通訊不正常,通訊錯誤增加。
2015-10-15 10:51:417142 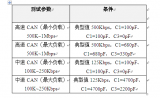
在CAN-bus電路設計中,理論上收發(fā)器支持節(jié)點數(shù)最多可做到110個,但實際應用中往往達不到這個數(shù)量。今天我們就來談談如何通過合理的CAN-bus總線設計,保證CAN網(wǎng)絡中的通訊的可靠性和節(jié)點數(shù)量。
2017-09-05 09:24:4922396 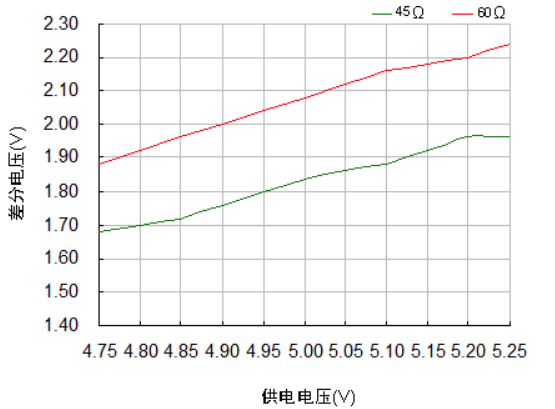
在CAN網(wǎng)絡中,所有節(jié)點的數(shù)據(jù)收發(fā)共享一條總線。當面對未知的多節(jié)點CAN總線網(wǎng)絡時,如何準確分析各節(jié)點間的通信協(xié)議呢?
2018-02-27 09:29:2716553 
“ 總線關閉(bus off)是CAN節(jié)點比較重要的錯誤處理機制。那么,在總線關閉狀態(tài)下,CAN節(jié)點的恢復流程是怎樣的?又該如何理解節(jié)點恢復流程的“快恢復”和“慢恢復”機制?本文將為大家詳細分析總線
2020-08-04 11:16:0016664 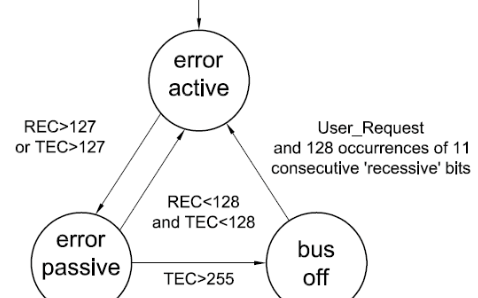
基于CAN總線的智能節(jié)點主程序流程如圖3所示,其發(fā)送方式通過查詢實現(xiàn),而發(fā)送數(shù)據(jù)方式通過中斷來實現(xiàn)。智能節(jié)點的主程序主要包括系統(tǒng)及外設初始化、CAN控制器初始化、數(shù)據(jù)發(fā)送、數(shù)據(jù)接收部分。
2021-03-13 12:34:074034 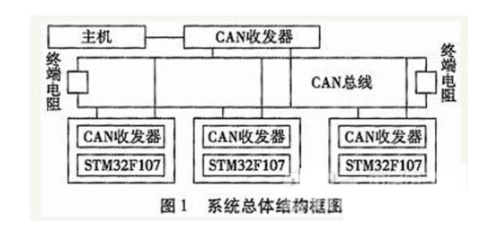
為了防止故障節(jié)點干擾甚至阻塞整個CAN網(wǎng)絡系統(tǒng),CAN協(xié)議實現(xiàn)了復雜的故障限制機制。為了保證通信的正常,CAN 2.0 總線協(xié)議總線中各節(jié)點需要采取以下措施進行錯誤檢測。
2022-11-08 17:12:4411400 為了防止故障節(jié)點干擾甚至阻塞整個CAN網(wǎng)絡系統(tǒng),CAN協(xié)議實現(xiàn)了復雜的故障限制機制。為了保證通信的正常,CAN 2.0 總線協(xié)議總線中各節(jié)點需要采取以下措施進行錯誤檢測:
2023-06-21 17:14:188979 
我們根據(jù)can總線具有的一些特性可知:CAN總線肯定具有分層結構,而且參考OSI模型(OSI參考模型介紹)是肯定的,我們可以看一下相關的文檔可知:CAN遵從OSI模型。
2024-01-05 09:40:161943 
導讀在汽車電子與工業(yè)控制等領域,CAN通信至關重要。本文圍繞CAN通信,闡述節(jié)點增多時如何減少寄生電容的策略,同時從發(fā)送、接收節(jié)點等方面,講解保障節(jié)點數(shù)量及通信可靠性的方法。如何減少寄生電容?增加
2025-01-03 11:41:513610 
報文濾波就可以實現(xiàn)點對點,1點對多點及全局廣播等幾種方式傳送接收,無需調度。(5),CAN的直接通信距離最遠可達10KM(5Kb/s),通信速率最高可達1Mb/s(40M)。(6),CAN上的節(jié)點
2014-04-27 15:16:02
請教一下,CAN總線的問題,目前有個項目,總結點數(shù)大概在200個左右,一根總線的話總長度在400米左右。看了兩款CAN總線驅動器TJA1050T和MCP2551,最大節(jié)點數(shù)好像都只有110個左右
2015-07-18 16:26:33
請教一下,CAN總線的問題,目前有個項目,總結點數(shù)大概在200個左右,一根總線的話總長度在400米左右。看了兩款CAN總線驅動器TJA1050T和MCP2551,最大節(jié)點數(shù)好像都只有110個左右
2015-07-18 16:23:23
參照 ISO/OSI 標準模型,CAN 總線的通信參考模型如圖 9-1 所示。這 4 層結構的功能如下:? 物理層規(guī)定了節(jié)點的全部電氣特性,在一個網(wǎng)絡里,要實現(xiàn)不同節(jié)點間的數(shù)據(jù)傳輸,所有節(jié)點的物理層
2018-12-14 14:17:02
。 問題1:ARM用戶板(節(jié)點1,收發(fā)器:tcan337)與ECU(節(jié)點2,收發(fā)器:vp230)兩節(jié)點可以正常進行CAN通信,但是當總線上加入第3個節(jié)點PC端(節(jié)點3,USB轉CAN模塊,收發(fā)器
2019-07-01 19:20:56
CAN總線如何實現(xiàn)通信呢?我大體思路這樣的:1、初始化的時候,給系統(tǒng)配置時鐘,處理看門狗電路2、初始化CAN模塊在調試的時候是不是要將計算機模擬成CAN節(jié)點,通過上位機的調試軟件和CCS來觀察呢如何發(fā)?如何收?這個感覺難點不少啊?求大神能有個具體的調試方法,先謝謝了
2020-06-01 15:56:35
了許多新技術和獨特設計,因而具有以下特點:1)總線以多主方式工作,通信方式靈活,且不用占地址等節(jié)點信息;2)CAN總線網(wǎng)絡上的節(jié)點信息分不 同的優(yōu)先級,可滿足不同的實時要求;3)采用非破壞性總線仲裁
2011-07-12 15:33:41
can節(jié)點,理論上,STM32就可以接入100多個串口設備了。但是,只使用一個【can串口】模塊,是無法使串口設備與STM32通信的,因為單片機都是TTL電平(0~3.3或5V),是無法與can總線(差分電平2.3V)通信的,所以必須有一個模塊能夠把單片機發(fā)出的信號轉換為CAN
2021-08-19 07:14:58
CANFD的來源是什么?CANFD有哪幾個顯著特點?CANFD節(jié)點如何與經(jīng)典CAN總線正常通信呢?
2021-06-16 09:31:08
作為一種重要的錯誤檢測手段,是節(jié)點判斷CAN幀信息的完整性并產(chǎn)生確認應答的依據(jù)。在現(xiàn)場總線通信和控制的實際應用中,工業(yè)應用環(huán)境往往是極端的溫度以及電磁噪聲或是其他的惡劣環(huán)境,系統(tǒng)在這種條件下能否正常
2019-09-25 15:41:50
、實時性和靈活性方面具有獨特的技術優(yōu)勢,主要特點如下:? CAN 總線是一種多主總線,總線上任意節(jié)點可在任意時刻主動地向網(wǎng)絡上其他節(jié)點發(fā)送信息而不分主次,因此可在各節(jié)點之間實現(xiàn)自由通信。? CAN
2018-12-13 14:26:31
通過CAN總線與各個從站節(jié)點進行通信。我們只需設一個主站節(jié)點作為主監(jiān)控器,以點對點方式進行通信,其余的從站均為各個溫度測量節(jié)點。各個節(jié)點都通過CAN總線實現(xiàn)信號數(shù)據(jù)的連接,各個溫度測量節(jié)點具有較強
2018-11-13 10:38:08
基于FPGA的CAN總線通信系統(tǒng)
2012-08-17 16:34:13
基于FPGA的CAN總線通信系統(tǒng)為了克服單片機固有的缺陷, 滿足航天控制的需求, 文章提出了如何利用FPGA采用查詢的方式控制CAN控制器SJA1000,從而實現(xiàn)CAN總線數(shù)據(jù)通信的方法; 介紹了
2012-08-11 11:55:19
說明:這是我的畢業(yè)設計,基于STM32的CAN總線通信節(jié)點設計。用的是STM32F103微控制器,LCD1602液晶顯示,MQ-4甲烷氣體傳感器,CTM1050CAN收發(fā)器。但是甲烷傳感器限于條件
2021-07-19 07:18:56
在項目的特殊環(huán)境要求下, CAN總線通信要求使用FPGA作為系統(tǒng)中的主控制器, 較之傳統(tǒng)設計使用的單片機, FPGA能夠在速度和體積上有更好的適應性。
2019-09-26 06:57:07
CAN總線有哪些優(yōu)點?CAN總線的工作原理是什么?怎樣去設計一種基于STM32F4的CAN總線多節(jié)點通信系統(tǒng)?
2021-06-30 07:41:27
作者:Xiaomin 概述 CAN(Controller Area Network)總線協(xié)議是由 BOSCH 發(fā)明的一種基于消息廣播模式的串行通信總線,它起初用于實現(xiàn)汽車內ECU之間可靠的通信,后
2019-07-26 08:33:27
CAN與RS232轉換節(jié)點的設計與實現(xiàn)
介紹將CAN總線接口與RS232總線接口相互轉換的設計方法和2種總線電平轉換關系,實現(xiàn)CAN總線與各模塊的接口設計,制定了相應的軟硬件設計方
2009-03-30 16:39:53 75
75 文章介紹了一種基于CAN 總線的煤礦瓦斯報警節(jié)點系統(tǒng)的設計,給出了基于CAN 總線的智能監(jiān)控節(jié)點網(wǎng)絡的一般結構,著重介紹了節(jié)點系統(tǒng)的軟硬件設計。關鍵詞:煤礦; 瓦斯傳感器;
2009-03-30 16:40:4647 介紹CAN 總線及其通信協(xié)議J1939, 并設計基于CAN 總線的多ECU 通信平臺的硬件結構; 闡述節(jié)點ECU 通信的軟件設計方法,在仿真試驗的條件下實現(xiàn)數(shù)據(jù)通信的功能。試驗表明該平臺運行
2009-04-15 09:49:5322 CAN 總線上的節(jié)點是網(wǎng)絡上的信息接收和發(fā)送站。智能節(jié)點能通過編程設置工作方式、ID地址、波特率等參數(shù)。它主要由單片機和可編程的CAN 通信控制器組成。本文介紹這類節(jié)點的硬
2009-05-13 16:11:3952 介紹CAN 總線控制器SJA1000; 給出其在CAN 總線系統(tǒng)節(jié)點中的應用方法、節(jié)點電路原理圖及初始化程序; 針對應用SJA1000 容易出現(xiàn)的問題進行了解說。
2009-05-13 16:43:3262 介紹CAN 總線及其通信協(xié)議J1939, 并設計基于CAN 總線的多ECU 通信平臺的硬件結構; 闡述節(jié)點ECU 通信的軟件設計方法,在仿真試驗的條件下實現(xiàn)數(shù)據(jù)通信的功能。試驗表明該平臺運行
2009-05-16 14:19:0828 CAN 總線作為一種現(xiàn)場總線,應用極為普及。本文給出了一種基于AT89C51 和SJA1000 的CAN 總線節(jié)點設計方法,并對軟硬件進行了相應的說明。關鍵詞:CAN 總線,SJA1000,單片機CAN(C
2009-05-25 13:26:1261 本文給出了一種由MCP250505 構成的無需外加CPU 的CAN 總線節(jié)點的設計方案,介紹了CAN 總線網(wǎng)絡節(jié)點的硬件設計和軟件設計,并對MCP25050 的特性以及相關協(xié)議作了詳細分析。實驗表明,
2009-06-22 08:41:4321 CAN總線上的智能節(jié)點是網(wǎng)絡上報文的接收和發(fā)送站,一般由單片機和可編程的CAN通信控制器組成。本文介紹了一種新型的獨立CAN 通信控制器MCP2515;給出其在CAN總線系統(tǒng)智能節(jié)
2009-06-26 10:38:51140 介紹了一種基于CAN 總線、采用雙CPU 結構的智能控制節(jié)點的設計,說明了該智能控制節(jié)點的工作原理并詳細闡述了其所具備的功能、硬件組成和軟件實現(xiàn)。此控制節(jié)點結構新穎,采
2009-07-08 15:19:5814 本設計為光電穩(wěn)定跟蹤平臺開發(fā)CAN 驅動,以實現(xiàn)CAN 總線上設備間的通信。分析了linux 下標準設備驅動機制和CAN 總線通信模型,給出了光電穩(wěn)定跟蹤平臺中CAN 總線通信的硬件設計
2009-08-04 08:33:4830 CAN(Control Area Network)總線技術是一種支持分布式實時控制的高安全性的串行總線。本文對CAN 控制網(wǎng)絡中重要的現(xiàn)場設備--智能節(jié)點的具體實現(xiàn)進行的研究,主要包括智能節(jié)點的軟件
2009-08-14 09:07:1811 摘要:介紹了基于CAN 總線的分布式果園氣象監(jiān)測系統(tǒng),重點描述了單片機P87C591的特點及以它為控制核心構成的監(jiān)測網(wǎng)絡節(jié)點的實現(xiàn)。
2009-09-08 14:57:0422 CAN總線是一種應用極為普及的現(xiàn)場總線。文中提出了一種CAN總線通信接口的設計方案。CAN總線智能節(jié)點用單片機AT89S52和SJA1000控制器為核心組成。分別從硬件電路設計和SJA1000軟件
2010-01-25 15:04:2252 摘要:CAN總線上的節(jié)點是網(wǎng)絡上的信息接收和發(fā)送站;智能節(jié)點能通過編程設置工作方式、ID、地址、波特率等參數(shù)。它主要由單片機和可編程的CAN通信控制器組成。本文介紹這類節(jié)
2010-12-20 22:18:4045 針對當前CAN總線及J1939協(xié)議在汽車電子中的廣泛應用,給出一種通過配置在低成本CAN I/O擴展器MCP2502X/05X器件上實現(xiàn)J1939協(xié)議的CAN總線節(jié)點的設計方法。詳細介紹擴展節(jié)點的配置方法和
2010-12-29 18:08:4528 ?摘要:介紹了一種用單片機ADμC812、CAN總線控制器SJA1000和CAN總線驅動器POA82C250組成的CAN總線智能節(jié)點的設計方案,給出了該節(jié)點的硬件結構和軟件設計方法,同時介紹
2006-03-11 11:47:391348 
摘要:介紹CAN總線及其通信協(xié)議J1939,并設計基于CAN總線的多ECN通信平臺的硬件結構;闡述節(jié)點ECN通信的軟件設計方法,在仿真試驗的條件下實現(xiàn)數(shù)
2006-03-11 13:21:032063 
CAN總線通信電路
2008-10-14 13:59:176881 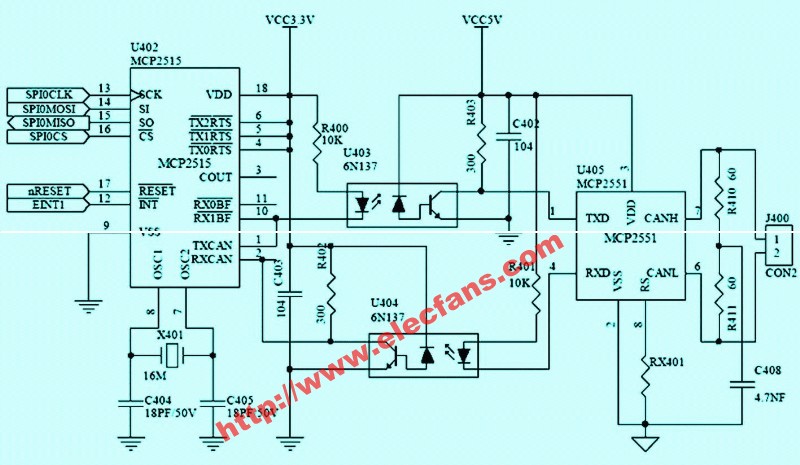
Linux環(huán)境下實現(xiàn)ARM9的CAN總線通信
1. 引言CAN(Controller Area Network)總線最早是由德國BOSCH公司提出,實現(xiàn)汽車環(huán)境中的微控制器通訊,在車
2009-11-02 15:06:541171 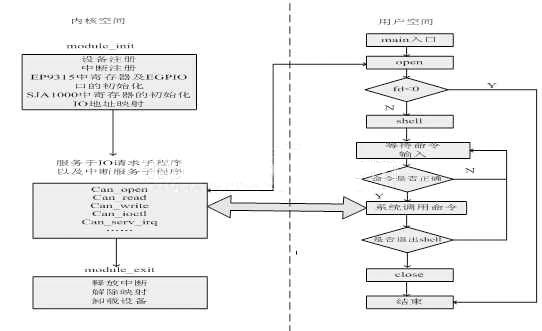
基于CAN總線的溫度檢測節(jié)點設計
在對電子點火模塊的測試中,為了模擬電子點火系統(tǒng)的真實工況,電子點火模塊往往被置于高于常溫的環(huán)境下進行電子點火實驗,
2010-01-12 11:13:132438 
為引入CAN總線技術以實現(xiàn)運動控制系統(tǒng)的網(wǎng)絡化,提出了基于LPC2294的CAN總線主節(jié)點的硬件及軟件設計方案。硬件采用基于ARM7內核的微控制器LPC2294,使用CTM1050T作為CAN收發(fā)器,設計了帶
2011-06-21 15:17:1261 本文選用can總線設計了分布式熱電阻智能節(jié)點,利用can總線連接各個網(wǎng)絡節(jié)點,可以直接與主控卡或上位機通信,組建成工業(yè)網(wǎng)絡分布式測控系統(tǒng)。
2011-09-08 15:19:312419 文章針對現(xiàn)有的模擬廣播系統(tǒng)存在抗干擾能力弱、傳輸距離短等不足,進行了基于CAN 總線的數(shù)字語音 通信系統(tǒng) 的研究。給出語音通信系統(tǒng)的總體構成,并對節(jié)點各模塊進行詳細設計。
2011-09-18 16:26:303929 
設計了多個CAN總線的通信節(jié)點,通過PCI9810-CAN適配卡上的CAN總線,組成一個局域通信網(wǎng)絡,實現(xiàn)了PC機對各個節(jié)點的監(jiān)控和通信以及節(jié)點間的自由通信。
2011-10-19 14:57:5668 系統(tǒng)以PIC18F4580單片機作為中間控制器,利用自身集成的CAN控制器與各采集單元節(jié)點進行通信,通過外部擴展CAN控制器MCP2510與上位機進行通信,以雙CAN總線接口實現(xiàn)雙層、多區(qū)域數(shù)據(jù)通信。
2012-02-07 12:01:3643 基于CAN總線系統(tǒng)結構構成,通過工程實踐的具體應用以及對CAN控制器及收發(fā)器硬件結構的深入理解,并從通信的角度出發(fā)著重深入分析了CAN總線通信的節(jié)點同步機制、總線地址機制、總
2012-05-08 15:23:04404 CAN總線是一種應用廣泛的實時性現(xiàn)場總線。本文提出了一種基于具有ARM7DMI內核的32位ARM微控制器LPC2294的CAN總線智能節(jié)點設計方案。詳細介紹了ARM微控制器LPC2294和隔離CAN收發(fā)器CTM1050T的特
2012-05-29 09:27:064475 
應用51單片機為控制核心結合其他的器件設計了一種能連接于CAN總線上的智能節(jié)點。通過單片機控制CAN總線控制器SJA1000,并進一步通過CAN總線收發(fā)器PCA82C250,實現(xiàn)該智能節(jié)點與CAN總線的
2013-01-10 16:54:57120 CAN總線通信詳解。
2016-03-30 16:46:100 CAN總線上的智能節(jié)點是網(wǎng)絡上報文的接收和發(fā)送站一般由單片機和可編程的通信控制器組成 本文介紹了一種新型的獨立CAN 通信控制器給出其在CAN 總線系統(tǒng)智能節(jié)點中的一個應用實例" 硬件設計給出了節(jié)點的電路原理圖" 軟件設計給出了系統(tǒng)程序的設計流程圖"并對其作了簡要的說明。
2016-04-01 09:41:020 基于FPGA的CAN總線通信系統(tǒng),下來看看。
2016-05-10 11:47:1337 Xilinx FPGA工程例子源碼:FPGA實現(xiàn)CAN總線控制器源碼
2016-06-07 14:13:4397 CAN總線通訊已經(jīng)從汽車電子行業(yè)逐漸向各行各業(yè)鋪開使用了,例如軌道交通、礦井監(jiān)控等。在設計CAN總線接口電路時需要注意,
對于提高CAN總線節(jié)點的可靠性而言,離不開隔離、總線阻抗匹配、總線保護等,在設計CAN節(jié)點時要注意這些點以提高總線電路可靠性和安全性。
2016-06-08 11:41:275188 接口控制新型的CAN 控制器MCP2515,使慣導系統(tǒng)不僅具備了接入CAN 總線的能力,而且在系統(tǒng)實現(xiàn)之后,節(jié)點可以根據(jù)現(xiàn)場應用提出的新要求進行升級,增加了使用的靈活性。目前實驗樣機已經(jīng)設計完成,可以正確地通過CAN 總線進行通訊,達到了設計的要求。
2016-07-13 17:43:300 CAN總線通信協(xié)議的分析和實現(xiàn) CAN總線通信協(xié)議以及其實現(xiàn)方法
2017-09-04 08:45:3340 下面小編將以圖文的方式告訴大家如何模擬CAN總線節(jié)點,不足之處還望大神們積極補充。
2017-09-21 14:44:4312 總線式的網(wǎng)絡通信有缺點:只能夠一條直線或曲線,不能夠開叉,不能夠環(huán)形閉合。開叉布線的問題可以通過加HUB來解決。本文介紹的是如何通過CAN的HUB來實現(xiàn)3個CAN節(jié)點的環(huán)形網(wǎng)絡通信。
2017-10-05 18:36:2710040 
設計,利用MCU控制CPLD擴展的多通道CAN節(jié)點完成CAN總線部分的設計,還給出軟件實現(xiàn)上的重點、難點和流程。實現(xiàn)了兩種不同總線的轉換,滿足了工業(yè)環(huán)境對兩種總線混合使用的要求。
2018-07-17 10:11:004234 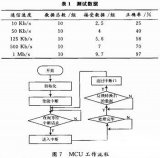
在各種現(xiàn)場總線中,CAN總線以其結構簡單、應用靈活方便而在工業(yè)過程控制和車輛中得到廣泛應用。在CAN的技術規(guī)范中,規(guī)定了CAN分為數(shù)據(jù)鏈路層和物理層兩層,用戶在設計通信軟件時,必須先根據(jù)需求設計合適
2018-01-08 15:01:029 和關聯(lián);重新定義CAN總線的開發(fā)測試方法,可對CAN網(wǎng)絡通信正確性、可靠性、合理性進行多角度全方位的評估;幫助用戶快速定位故障節(jié)點,解決CAN總線應用的各種問題,是CAN總線開發(fā)測試的終極工具。
2018-08-12 11:51:1413349 
控制等領域。在CAN總線的節(jié)點設計中,目前應用較多的是通過單片機的控制來實現(xiàn)。有的單片機已經(jīng)嵌入了CAN控制器的功能,比如Philips的P8XC592,Motorola的68HC05X4等,但這類
2020-04-12 07:48:008679 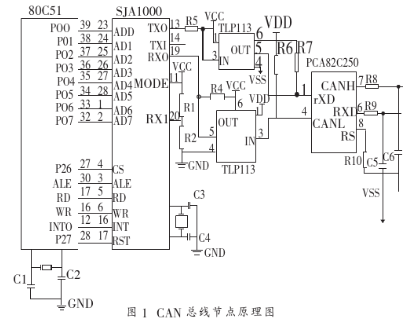
CAN(Controller Area Network)即控制器局域網(wǎng),是目前廣泛應該的總路線之一。CAN總線通信距離限制小,它的直接通信距離最大可達10km,最高通信速率可以達1Mb/s(此時距離
2020-03-26 08:05:002715 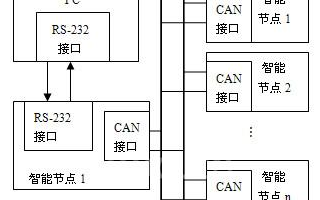
;而CAN總線在電梯群控系統(tǒng)中卻體現(xiàn)出更多的優(yōu)勢:CAN總線通信與RS485通信相比抗干擾能力更好;可連接較多的通信節(jié)點;通信速率更高;實時性與穩(wěn)定性高,所以本文采用CAN總線來實現(xiàn)群控主機和各電梯之間的通信。
2019-10-30 07:51:006878 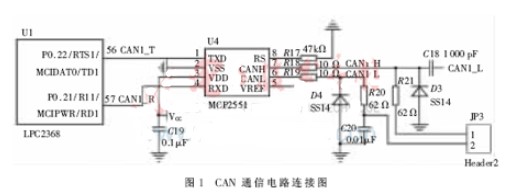
用戶在使用CAN總線通信時,一般只需要接CAN_H和CAN_L兩根導線。但是導線畢竟都多少有些內阻,因此在使用導線傳輸信號時,肯定會存在一定的損耗,而CAN總線標準中也大概介紹了在不同波特率下CAN
2018-12-23 10:31:597646 CAN總線由德國BOSCH 公司首先提出來的,CAN總線是目前工業(yè)界廣泛應用的總線。CAN 控制器工作于多主站方式,網(wǎng)絡中的各節(jié)點都可根據(jù)總線訪問優(yōu)先權采用無損結構的逐位仲裁的方式競爭向總線發(fā)送數(shù)據(jù)
2019-08-19 14:35:432977 CAN總線由德國BOSCH 公司首先提出來的,CAN總線是目前工業(yè)界廣泛應用的總線。CAN 控制器工作于多主站方式,網(wǎng)絡中的各節(jié)點都可根據(jù)總線訪問優(yōu)先權采用無損結構的逐位仲裁的方式競爭向總線發(fā)送數(shù)據(jù)
2019-08-26 08:59:485879 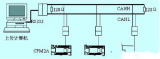
CAN總線的出現(xiàn)為分布式控制系統(tǒng)實現(xiàn)各節(jié)點之間實時、可靠的數(shù)據(jù)通信提供了強有力的技術支持,在帶來便利的同時,也為工程師們故障排查增加了難度,所以本文主要給大家介紹了找到CAN總線(故障)節(jié)點的三種辦法。
2020-01-01 16:32:008577 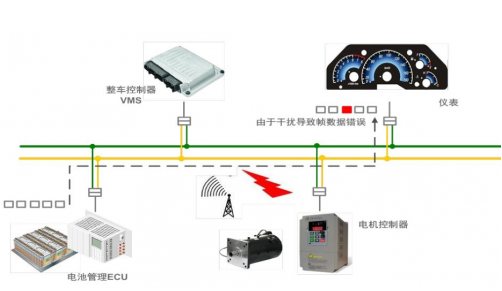
接口控制新型的CAN 控制器MCP2515,使慣導系統(tǒng)不僅具備了接入CAN 總線的能力,而且在系統(tǒng)實現(xiàn)之后,節(jié)點可以根據(jù)現(xiàn)場應用提出的新要求進行升級,增加了使用的靈活性。目前實驗樣機已經(jīng)設計完成,可以正確地通過CAN 總線進行通訊,達到了設計的要求。
2021-01-27 15:52:0017 CAN總線節(jié)點軟件的設計與實現(xiàn)說明。
2021-04-19 16:59:1020 MCP2510是Microchip公司生產(chǎn)的一種獨立的可編程CAN控制器芯片。本文將介紹新型的獨立CAN通信控制器MCP2510,并給出其在CAN總線系統(tǒng)智能節(jié)點中的應用實例。
2021-06-23 15:16:335581 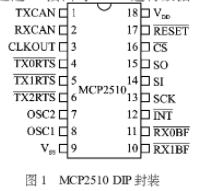
【科普】CAN總線介紹及FPGA實現(xiàn)方案簡介 這里我們先逆推一下CAN總線的一些特點。 第一,CAN總線分層結構 我們根據(jù)can總線具有的一些特性可知:CAN總線肯定具有分層結構,而且參考OSI模型
2021-11-18 16:35:556763 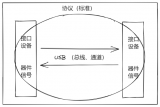
說明:這是我的畢業(yè)設計,基于STM32的CAN總線通信節(jié)點設計。用的是STM32F103微控制器,LCD1602液晶顯示,MQ-4甲烷氣體傳感器,CTM1050CAN收發(fā)器。但是甲烷傳感器限于條件
2021-12-24 19:30:1053 CAN 總線插卡可以任意插在 PC AT XT 兼容機上,方便地構成分布式監(jiān)控系統(tǒng)。因此,用 FPGA 實現(xiàn) CAN 總線通信控制器具有非常重要的應用價值。本篇將通過一個實例講解利用 FPGA 實現(xiàn) CAN 總線通信控制器的實現(xiàn)方法。
2022-07-29 09:43:223512 CAN 總線是一種多主總線,總線上任意節(jié)點可在任意時刻主動地向網(wǎng)絡上其他節(jié)點發(fā)送信息而不分主次,因此可在各節(jié)點之間實現(xiàn)自由通信。
2023-01-30 11:58:231559 即從CAN控制芯片輸出邏輯電平到CAN收發(fā)器,然后經(jīng)過CAN收發(fā)器內部轉換將邏輯電平轉換為差分信號輸出到CAN總線上,CAN總線上的節(jié)點都可以決定自己是否需要總線上的數(shù)據(jù)。
2023-03-29 10:06:1611153 今天給大俠帶來基于FPGA的CAN總線控制器的設計,由于篇幅較長,分三篇。今天帶來第一篇,上篇,CAN 總線協(xié)議解析以及 CAN 通信控制器程序基本框架。話不多說,上貨。
2023-05-18 09:21:302346 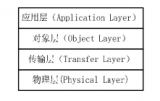
點擊上方 藍字 關注我們 摘要:以FPGA 代替?zhèn)鹘y(tǒng)的單片機和外圍擴展芯片, 給出了CAN 總線通信節(jié)點的詳細設計方案。其中以SJA1000為CAN 總線控制器、FPGA 為主控制器, 設計實現(xiàn)通信
2023-06-18 11:15:014209 ,各種各樣的電子控制系統(tǒng)被開發(fā)了出來。由于這些系統(tǒng)之間通信所用的數(shù)據(jù)類型及對可靠性的要求不盡相同,由多條總線構成的情況很多,線束的數(shù)量也隨之增加。 總結下,當一個節(jié)點要向其它節(jié)點發(fā)送數(shù)據(jù)時,該節(jié)點的CPU將要發(fā)送的數(shù)據(jù)和自己的標識符傳送給本節(jié)點的CAN芯片,并處于準備
2023-07-18 11:10:464301 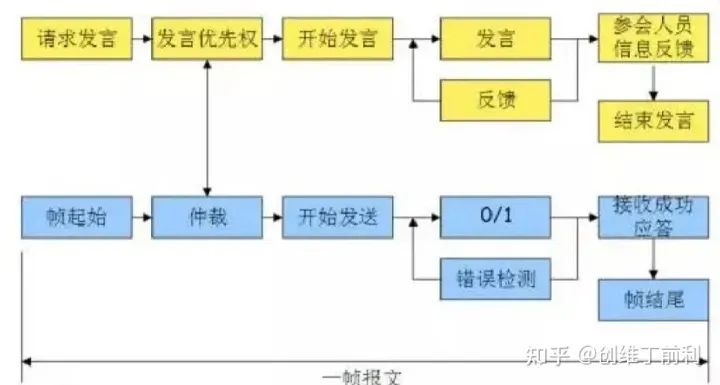
電子發(fā)燒友網(wǎng)站提供《基于ARM和CAN總線的電氣信號采集節(jié)點的設計.pdf》資料免費下載
2023-10-13 11:31:031 電子發(fā)燒友網(wǎng)站提供《基于CAN總線的智能節(jié)點設計.pdf》資料免費下載
2023-10-20 14:44:3221 電子發(fā)燒友網(wǎng)站提供《機載CAN總線節(jié)點的模塊化設計與實現(xiàn).pdf》資料免費下載
2023-10-31 10:15:400 CAN總線是一種分布式串行通信協(xié)議,它允許多個節(jié)點同時連接在一個總線上,并通過差分信號進行通信。
2024-01-30 13:49:294419 
CAN總線最大能夠帶多少節(jié)點?CANFD相對于CAN2.0有哪些差異呢? CAN總線最大能夠帶多少節(jié)點? CAN總線是一種廣泛應用于汽車領域的多主機串行通信總線。CAN總線使用CSMA/CR
2024-01-31 14:08:596984 找到CAN總線(故障)節(jié)點的三種辦法? CAN總線是現(xiàn)代汽車電子系統(tǒng)中常見的通信協(xié)議,用于車載電子設備之間的數(shù)據(jù)傳輸。在汽車的CAN總線系統(tǒng)中,每個節(jié)點都扮演著重要的角色。然而,由于各種原因,有時候
2024-02-02 10:35:102643 開源硬件平臺,通過添加CAN總線模塊,也可以實現(xiàn)CAN通信。 硬件準備 Arduino開發(fā)板 :可以選擇Arduino Uno、Mega等型號。 CAN總線模塊 :如MCP2515或MCP2562,這些模塊
2024-11-12 10:09:173772 于工業(yè)自動化、醫(yī)療設備、船舶系統(tǒng)等領域。 CAN總線通信原理介紹 1. CAN總線概述 CAN總線是一種多主控制的串行通信協(xié)議,它允許多個設備共享同一通信線路,實現(xiàn)數(shù)據(jù)的實時傳輸。CAN協(xié)議定義了物理層、數(shù)據(jù)鏈路層和應用層,其中數(shù)據(jù)鏈路層是CAN協(xié)議的核心。 2. CAN總線的基本組成 物理
2024-11-21 10:21:513466 的硬件模塊實現(xiàn)CAN總線通信。 硬件需求 Arduino板 :任何支持Arduino IDE的板子都可以,例如Arduino Uno、Mega等。 CAN總線模塊 :例如MCP2515或MCP2562
2024-12-23 09:06:442996
 電子發(fā)燒友App
電子發(fā)燒友App











 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論