步進(jìn)電機(jī)控制器電路
2010-02-05 15:32:40 3342
3342 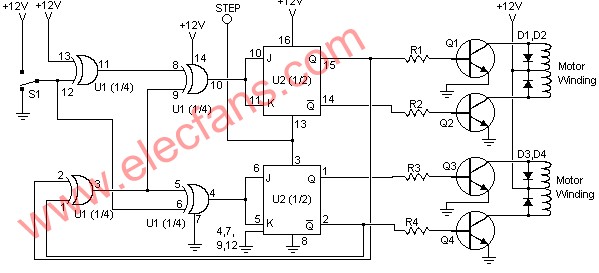
本文介紹了一些重要的步進(jìn)電機(jī)相關(guān)技術(shù),為開發(fā)人員基本了解步進(jìn)電機(jī)的工作原理提供了足夠的信息,同時(shí)也介紹了用微控制器或數(shù)字信號(hào)處理器控制 步進(jìn)電機(jī) 的方法。 步進(jìn)電機(jī)也
2011-09-08 11:46:583576 
在本教程中,我們將使用 MSP430 連接步進(jìn)電機(jī)。MSP-EXP430G2 是德州儀器提供的開發(fā)工具,又名 LaunchPad,用于學(xué)習(xí)和練習(xí)如何使用其微控制器。該板屬于 MSP430 超值系列類別,我們可以在其中對(duì)所有 MSP430 系列微控制器進(jìn)行編程。
2022-11-11 17:11:261815 
在本教程中,我們將步進(jìn)電機(jī)與PIC微控制器PIC16F877A連接。
2022-11-15 17:25:101955 
parameters of the controller setup program have been completed in subroutine.子程序中完成了激光器、程控衰減器和樣品移動(dòng)臺(tái)的步進(jìn)電機(jī)控制器...
2021-08-31 08:44:22
用單片機(jī)設(shè)計(jì)一個(gè)步進(jìn)電機(jī)控制器。要求能對(duì)步進(jìn)電機(jī)實(shí)現(xiàn)正、反轉(zhuǎn)及速度控制,同時(shí)能對(duì)步進(jìn)電機(jī)進(jìn)行位置控制,即能控制步進(jìn)電機(jī)從一個(gè)位置精確地運(yùn)行到另一個(gè)位置。步進(jìn)電機(jī)為四相反應(yīng)式,軟件生成脈沖序列,可設(shè)
2012-12-08 15:50:26
用單片機(jī)設(shè)計(jì)一個(gè)步進(jìn)電機(jī)控制器。要求能對(duì)步進(jìn)電機(jī)實(shí)現(xiàn)正、反轉(zhuǎn)及速度控制,同時(shí)能對(duì)步進(jìn)電機(jī)進(jìn)行位置控制,即能控制步進(jìn)電機(jī)從一個(gè)位置精確地運(yùn)行到另一個(gè)位置。步進(jìn)電機(jī)為四相反應(yīng)式,軟件生成脈沖序列,可設(shè)
2013-03-20 16:48:37
步進(jìn)電機(jī)控制器總結(jié)一、整體框架:系統(tǒng)在通信方式時(shí)支持主從控制二、系統(tǒng)原理1、 控制信號(hào)模塊電機(jī)控制信號(hào):EN——>電機(jī)使能信號(hào),只有當(dāng)該信號(hào)有效的時(shí)候,步進(jìn)電機(jī)才會(huì)工作DIR/CP+——>
2021-09-07 07:46:23
步進(jìn)電機(jī)與步進(jìn)電機(jī)控制器連接:A+:黑A-:綠B+:紅B-:藍(lán)電機(jī)控制器與arduino板連接:PUL-,DIR-,EN-連arduino的地EN+:脫機(jī)信號(hào),接地或者不接DIR+:控制轉(zhuǎn)動(dòng)方向,高電平正轉(zhuǎn)PUL+:控制脈沖...
2021-07-08 07:21:38
01步進(jìn)電機(jī)驅(qū)動(dòng)控制器步進(jìn)電機(jī)驅(qū)動(dòng)器作為實(shí)驗(yàn)裝置可控的部分,能夠提供自動(dòng)測(cè)量的方法。前面已經(jīng)有兩款步進(jìn)電機(jī)驅(qū)動(dòng)器:SH-20403AXIS12雙軸藍(lán)牙移動(dòng)框架基于ESP8266WiFi步進(jìn)電機(jī)控制
2021-08-31 08:32:52
控制器硬件:一體化步進(jìn)電機(jī)控制器 modbus-rtu-485控制器云臺(tái)硬件:北京江云光電 DZY200RA100電動(dòng)旋轉(zhuǎn)云臺(tái)1,控制接線,連接RS485通信接線: USB轉(zhuǎn)485的 T/R+-
2021-08-31 08:26:26
控制器電子器件在儲(chǔ)存狀態(tài)下的可靠性。純分享帖,需要者可點(diǎn)擊附件獲取完整資料~~~*附件:電機(jī)控制器電子器件可靠性研究.pdf
【免責(zé)聲明】本文系網(wǎng)絡(luò)轉(zhuǎn)載,版權(quán)歸原作者所有。本文所用視頻、圖片、文字如涉及作品版權(quán)問題,請(qǐng)第一時(shí)間告知,刪除內(nèi)容!
2025-04-17 22:31:04
SM1P步進(jìn)電機(jī)控制器怎么接線?
2021-10-09 07:33:24
伺服電機(jī)控制器與步進(jìn)電機(jī)控制器有啥不一樣?
2021-02-25 07:42:10
控制器的輸出信號(hào)為雙脈沖,能否控制單脈步進(jìn)驅(qū)動(dòng)器驅(qū)動(dòng)兩相步進(jìn)電機(jī)?
2023-04-04 16:42:23
用vhdl語言做步進(jìn)電機(jī)的控制器。應(yīng)該如何入手呢?看了很多資料,各有各的思路,越看越混亂,要分成幾個(gè)模塊去做呢? 求大神帶!
2016-04-27 10:21:33
基于LabVIEW的步進(jìn)電機(jī)控制器的設(shè)計(jì)
2012-09-04 15:14:31
新人一枚,希望大家能發(fā)個(gè)關(guān)于 基于LabVIEW的步進(jìn)電機(jī)PID速度控制器 的文章,謝謝了!!!!
2015-04-20 20:34:47
我想用STM32做步進(jìn)電機(jī)控制器,伺服驅(qū)動(dòng)器,誰幫我?
2024-05-17 16:00:32
本文介紹通過FPGA實(shí)現(xiàn)的步進(jìn)電機(jī)控制器。該控制器可以作為單片機(jī)或DSP的一個(gè)直接數(shù)字控制的外設(shè),只需向控制器的控制寄存器和分頻寄存器寫入數(shù)據(jù),即可實(shí)現(xiàn)對(duì)步進(jìn)電機(jī)的控制。
2021-04-29 06:05:44
微型步進(jìn)電機(jī)驅(qū)動(dòng)控制器,北京偉恩斯技術(shù)有限公司集驅(qū)動(dòng)和控制于一體,結(jié)構(gòu)緊湊,便于安裝,廣泛運(yùn)用于生物儀器、醫(yī)療器械、工業(yè)自動(dòng)化、多點(diǎn)控制組網(wǎng)矩陣等領(lǐng)域。有脈沖方向型,485總線型,CAN總線型等,通過編程,可在驅(qū)動(dòng)器內(nèi)部實(shí)現(xiàn)軌跡規(guī)劃等功能,提高運(yùn)動(dòng)控制系統(tǒng)的精度和效率。...
2021-08-31 08:09:29
微型步進(jìn)電機(jī)驅(qū)動(dòng)控制器到底長(zhǎng)什么樣?
2021-10-28 07:46:29
微型步進(jìn)電機(jī)驅(qū)動(dòng)控制器,北京偉恩斯技術(shù)有限公司集驅(qū)動(dòng)和控制于一體,結(jié)構(gòu)緊湊,便于安裝,廣泛運(yùn)用于生物儀器、醫(yī)療器械、工業(yè)自動(dòng)化、多點(diǎn)控制組網(wǎng)矩陣等領(lǐng)域。有脈沖方向型,485總線型,CAN總線型等,通過編程,可在驅(qū)動(dòng)器內(nèi)部實(shí)現(xiàn)軌跡規(guī)劃等功能,提高運(yùn)動(dòng)控制系統(tǒng)的精度和效率。...
2021-08-31 07:06:25
STM32發(fā)出脈沖一般有哪幾種方式?怎樣通過控制器輸入脈沖去控制步進(jìn)電機(jī)呢?
2021-12-21 06:25:47
求大神分享SM1P步進(jìn)電機(jī)控制器操作說明
2021-10-09 07:40:22
Arduino 2560控制兩個(gè)步進(jìn)電機(jī)用arduino和步進(jìn)電機(jī)控制器驅(qū)動(dòng)兩個(gè)步進(jìn)電機(jī),具體的接線過程和怎樣連接都在圖片上。準(zhǔn)備工具:兩個(gè)步進(jìn)電機(jī)(我用的是J42):Arduino板(我用
2021-08-31 06:13:29
描述硬盤步進(jìn)電機(jī)速度控制器這個(gè)想法來自控制步進(jìn)電機(jī)的需要,而不需要復(fù)雜的編程或微控制器和其他復(fù)雜的 IC,我想找到最便宜的解決方案。PCB
2022-08-05 06:29:44
跪求!!求基于LabVIEW步進(jìn)電機(jī)PID速度控制器的設(shè)計(jì)
2015-04-21 15:52:00
基于GAL器件的步進(jìn)電機(jī)控制器的研究與設(shè)計(jì)
采用GAL控制脈沖分配的邏輯設(shè)計(jì)若采用集成電路芯片來實(shí)現(xiàn)三相六拍步進(jìn)電機(jī)的控制,所用器件較多! 電路一般比較復(fù)雜# 為
2008-10-21 01:53:23 42
42 LabVIEW控制步進(jìn)電機(jī)的并口通訊研究:本文給出了基于LabVIEW控制步進(jìn)電機(jī)的方法,并講述了控制系統(tǒng)的構(gòu)成。
2009-04-02 10:55:1369 本文利用陳列邏輯器件GAL16V8對(duì)步進(jìn)電機(jī)實(shí)現(xiàn)控制,給出了89C55單片機(jī)控制的硬件、軟件設(shè)計(jì)實(shí)例。
2009-04-02 16:30:16201 本文闡述了基于CPLD的毛皮機(jī)梳理頭步進(jìn)電機(jī)控制器的設(shè)計(jì)原理與結(jié)構(gòu)。
2009-04-02 17:00:3718 直流步進(jìn)電機(jī)控制器實(shí)例(VHDL源代碼):步進(jìn)電機(jī)控制器.vhd,直流電機(jī)控制器.vhd
2009-05-27 08:51:5463 直流步進(jìn)電機(jī)控制器實(shí)例(VHDL源代碼):
2009-05-27 10:23:0547 小激光器實(shí)驗(yàn)系統(tǒng)有多臺(tái)混合式步進(jìn)電機(jī)和反應(yīng)式步進(jìn)電機(jī)需要控制,無論是靶丸的空間位置調(diào)節(jié),還是光路中波片的調(diào)節(jié)都離不開步進(jìn)電機(jī)的精確控制。通過PCL839 運(yùn)動(dòng)控制卡以及
2009-06-24 09:41:5618 用MCP定時(shí)器控制步進(jìn)電機(jī):步進(jìn)電機(jī)簡(jiǎn)介1.1.1 步進(jìn)電機(jī)步進(jìn)電機(jī)和普通電動(dòng)機(jī)不同之處是步進(jìn)電機(jī)接受脈沖信號(hào)的控制。步進(jìn)電機(jī)靠一種叫環(huán)形分配器的電子開關(guān)器件,通過功
2009-09-19 11:36:3223 RORZE綜合手冊(cè)2003--控制器驅(qū)動(dòng)器步進(jìn)電機(jī):由帶有通用輸入輸出接點(diǎn)(用于觸點(diǎn)控制及傳感器輸入)的步進(jìn)電機(jī)控制器(RC-204A、207A、231(HA)、233A、RC-410A、420A)型步進(jìn)電機(jī)驅(qū)動(dòng)器(R D
2010-01-09 10:12:0789 GY8608 CAN 總線接口的雙路步進(jìn)電機(jī)控制器:1、CAN 總線接口,可通過同時(shí)控制2 路步進(jìn)電機(jī)。2、如果只控制一路步進(jìn)電機(jī),最大工作頻率25khz。3、如果同時(shí)控制兩路步進(jìn)電機(jī),則
2010-01-14 18:40:1434 控制步進(jìn)電機(jī)的現(xiàn)場(chǎng)總線端子-集成的步進(jìn)電機(jī)控制器:用于新驅(qū)動(dòng)技術(shù)的總線端子為最高功率為200W 的小型步進(jìn)電機(jī)提供了運(yùn)動(dòng)控制解決方案。KL2531和KL2541 步進(jìn)電機(jī)端子便是用于傳
2010-10-06 09:52:5741 TMC428是TRINAMIC公司最新開發(fā)的步進(jìn)電機(jī)運(yùn)動(dòng)控制器,它可減少電機(jī)控制軟件設(shè)計(jì)的工作量,降低開發(fā)成本。以它為核心(包括TMC236型步進(jìn)電機(jī)驅(qū)動(dòng)器)構(gòu)成的3軸步進(jìn)電機(jī)驅(qū)動(dòng)
2010-12-03 15:47:2971 步進(jìn)電機(jī)的PLC直接控制
步進(jìn)電機(jī)的可編程控制器直接控制,可使組合機(jī)床自動(dòng)生產(chǎn)線控制系統(tǒng)的成本顯著下降。文章介紹了用PLC控制步
2009-06-19 14:09:033272 
單極性步進(jìn)電機(jī)控制器電路--Unipolar Stepper Motor Controller
This is a very good integrated circuit. There is no need for any external glue logic to drive the circui
2010-01-13 21:06:382162 
基于FPGA的步進(jìn)電機(jī)控制器設(shè)計(jì)
?????? 目前大多數(shù)步進(jìn)電機(jī)控制器需要主控制器發(fā)送時(shí)鐘信號(hào),并且要至少一個(gè)I/O口來輔助控
2010-02-09 10:44:443069 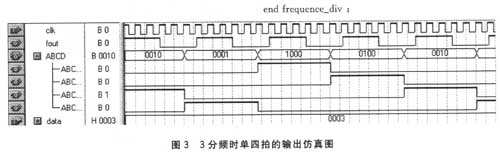
高電流雙極步進(jìn)電機(jī)控制器電路,High current bipolar stepper motor controller
2010-02-27 09:32:512615 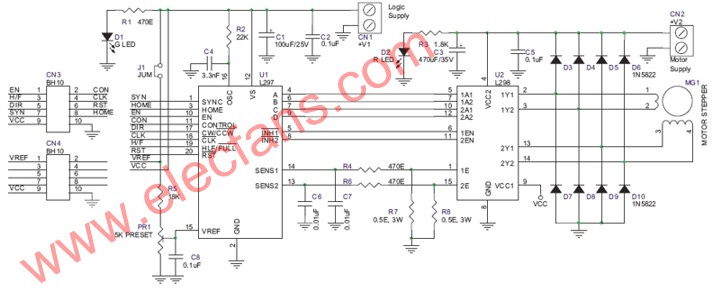
根據(jù)Nios II處理器的Avalon總線規(guī)范,設(shè)計(jì)了一款面向步進(jìn)電機(jī)的控制器IP核。該定制IP核采用軟、硬件協(xié)同設(shè)計(jì)的方法,功能符合Avalon總線的讀寫傳輸時(shí)序,具有完備的步進(jìn)電機(jī)驅(qū)動(dòng)能力。仿
2011-12-23 14:02:3244 基于單片機(jī)的步進(jìn)電機(jī)控制系統(tǒng)的研究....
2016-01-04 15:25:3923 單軸步進(jìn)電機(jī)控制器,可在控制器操控界面直接編寫任務(wù)
2016-03-03 16:32:220 TMC428型3軸步進(jìn)電機(jī)控制器的原理及應(yīng)用
2016-04-25 10:10:0730 基于最小偏差法的步進(jìn)電機(jī)速度控制方法研究。
2016-05-03 13:52:593 基于最小偏差法步進(jìn)電機(jī)加減速控制的研究。
2016-05-03 13:52:598 基于SOPC的步進(jìn)電機(jī)加減速PWM控制器IP核設(shè)計(jì)
2016-05-03 13:52:5918 步進(jìn)電機(jī)的精確控制方法研究,有需要 下來看看
2016-05-04 14:35:598 步進(jìn)電機(jī)控制器,感興趣的小伙伴們可以看一看。
2016-08-23 16:23:3217 電子、電子信息專業(yè)電路單片機(jī)學(xué)習(xí)教程資料——步進(jìn)電機(jī)的精確控制方法研究
2016-08-26 17:02:460 步進(jìn)電機(jī)驅(qū)動(dòng)控制技術(shù)及其應(yīng)用設(shè)計(jì)研究
2016-12-26 17:21:550 單片機(jī)控制步進(jìn)電機(jī)的方法研究與應(yīng)用
2021-11-30 11:55:5810 步進(jìn)電機(jī)是一種感應(yīng)電機(jī),它的工作原理是利用電子電路,將直流電變成分時(shí)供電的,多相時(shí)序控制電流,用這種電流為步進(jìn)電機(jī)供電,步進(jìn)電機(jī)才能正常工作,驅(qū)動(dòng)器就是為步進(jìn)電機(jī)分時(shí)供電的,多相時(shí)序控制器。
2017-08-11 16:47:2325536 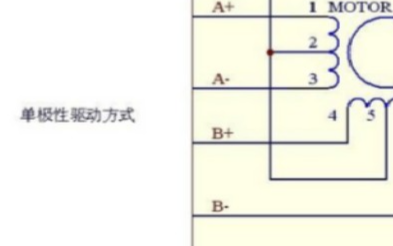
、反饋裝置、驅(qū)動(dòng)放大器、運(yùn)動(dòng)控制器組合成一個(gè)整體。其優(yōu)勢(shì)為:體積小、故障率低、無需匹配電機(jī)和驅(qū)動(dòng)控制器,使用簡(jiǎn)單,系統(tǒng)設(shè)計(jì)和維護(hù)方便,大大減少產(chǎn)品開發(fā)時(shí)間。 然而國(guó)外的一體化步進(jìn)系統(tǒng)售價(jià)高昂,一般在200到1000美
2017-11-01 10:16:015 的步進(jìn)電機(jī)多軸控制器是以微控制器(MCU)/微處理器(MPU)/專用集成電路(ASIC)/數(shù)字信號(hào)處理器(DSP)為核心,再輔以其他外圍分立器件構(gòu)成的。這種結(jié)構(gòu)的步進(jìn)電機(jī)多軸控制器的優(yōu)點(diǎn)在于其硬件結(jié)構(gòu)清晰,易于復(fù)制再現(xiàn),對(duì)于類
2017-11-08 14:21:4512 提出一種應(yīng)用現(xiàn)場(chǎng)可編程門陣列(FPGA)實(shí)現(xiàn)多軸步進(jìn)電機(jī)控制器的方法。采用IP設(shè)計(jì)思想,步進(jìn)電機(jī)的運(yùn)動(dòng)控制由硬件電路(步進(jìn)電機(jī)IP核)實(shí)現(xiàn),軌跡計(jì)算由同一芯片上的微處理器(Nios II軟核)實(shí)現(xiàn)
2017-12-06 10:41:3024 多軸步進(jìn)電機(jī)插補(bǔ)控制器及多軸步進(jìn)電機(jī)運(yùn)動(dòng)控制卡控制方法
2018-04-11 10:24:4729 步進(jìn)電機(jī)和伺服電機(jī)是工控領(lǐng)域應(yīng)用最廣泛的兩類產(chǎn)品,而它們的核心分別是步進(jìn)電機(jī)控制器與伺服電機(jī)控制器,本文將給大家講解這兩種器件不一樣的地方。
2018-09-16 09:48:193411 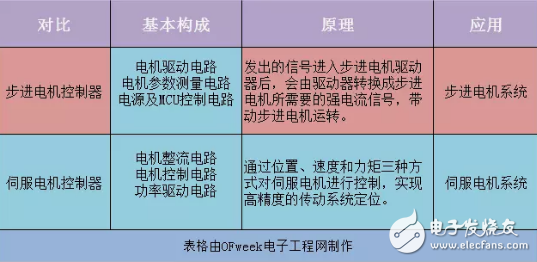
該項(xiàng)目旨在通過制造模塊化控制器來簡(jiǎn)化步進(jìn)電機(jī)的使用,該模塊化控制器可以輕松驅(qū)動(dòng)步進(jìn)電機(jī),而無需使用微控制器來完成工作。
2019-08-08 11:52:0319850 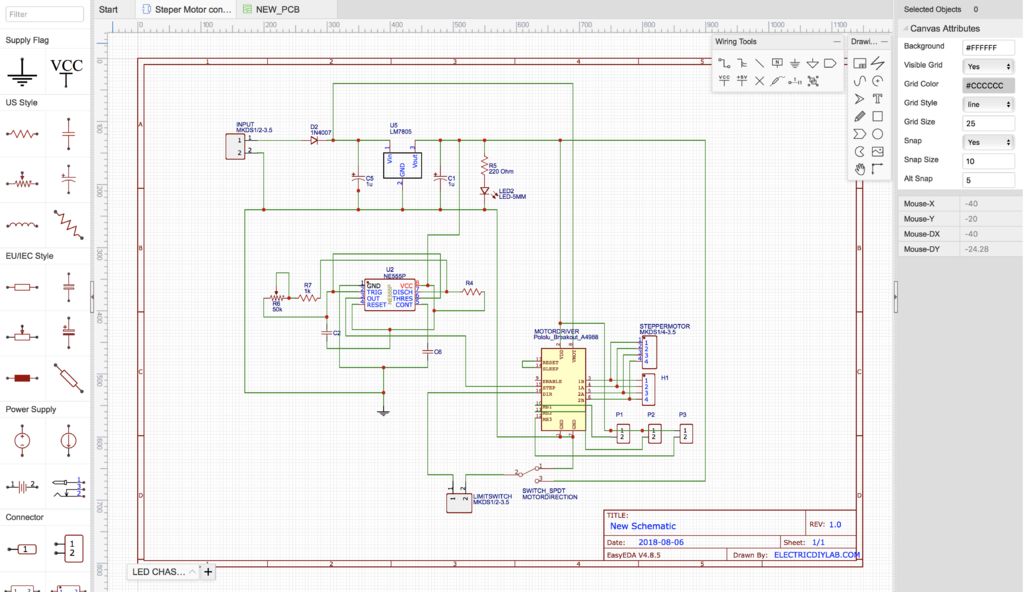
步進(jìn)電機(jī)控制器是一種能夠發(fā)出平均脈沖信號(hào)的電子產(chǎn)品,它發(fā)出的信號(hào)進(jìn)入步進(jìn)電機(jī)驅(qū)動(dòng)器后,會(huì)由驅(qū)動(dòng)器轉(zhuǎn)換成步進(jìn)電機(jī)所需要的強(qiáng)電流信號(hào),帶動(dòng)步進(jìn)電機(jī)運(yùn)轉(zhuǎn)。
2019-10-01 15:10:008324 
步進(jìn)電機(jī)控制器接線圖如下:接線之前我們需要大概了解,控制器需要發(fā)送什么信號(hào),才能控制驅(qū)動(dòng)器,進(jìn)而操縱電機(jī)。
2019-10-01 08:51:0019280 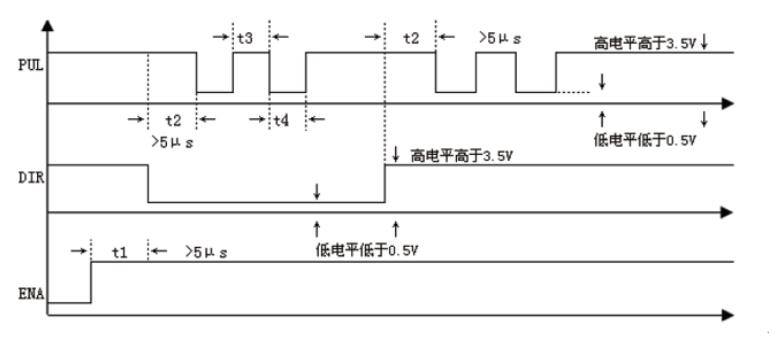
步進(jìn)電機(jī)控制器是一種能夠發(fā)出均勻脈沖信號(hào)的電子產(chǎn)品,它發(fā)出的信號(hào)進(jìn)入步進(jìn)電機(jī)驅(qū)動(dòng)器后,會(huì)由驅(qū)動(dòng)器轉(zhuǎn)換成步進(jìn)電機(jī)所需要的強(qiáng)電流信號(hào),帶動(dòng)步進(jìn)電機(jī)運(yùn)轉(zhuǎn)。步進(jìn)電機(jī)控制器能夠準(zhǔn)確的控制步進(jìn)電機(jī)轉(zhuǎn)過每一個(gè)角度。
2019-10-01 08:58:0017380 步進(jìn)電機(jī)控制器:它是一種能夠發(fā)出均勻脈沖信號(hào)的電子產(chǎn)品,它發(fā)出的信號(hào)進(jìn)入步進(jìn)電機(jī)驅(qū)動(dòng)器后,會(huì)由驅(qū)動(dòng)器轉(zhuǎn)換成步進(jìn)電機(jī)所需要的強(qiáng)電流信號(hào),帶動(dòng)步進(jìn)電機(jī)運(yùn)轉(zhuǎn)。步進(jìn)電機(jī)控制器能夠準(zhǔn)確的控制步進(jìn)電機(jī)轉(zhuǎn)過每一個(gè)角度。
2019-12-10 08:49:069924 步進(jìn)電機(jī)已經(jīng)滲透入我們生活的方方面面,本文介紹了一些重要的步進(jìn)電機(jī)相關(guān)技術(shù),為開發(fā)人員基本了解步進(jìn)電機(jī)的工作原理提供了足夠的信息,同時(shí)也介紹了用微控制器或數(shù)字信號(hào)處理器控制步進(jìn)電機(jī)的方法。 步進(jìn)電機(jī)也叫步進(jìn)器,它利用電磁學(xué)原理,將電能轉(zhuǎn)換為機(jī)械能,人們?cè)缭?0世紀(jì)20年代就開始使用這種電機(jī)。
2020-03-14 09:09:053667 為了適應(yīng)這種控制需求,對(duì)通用步進(jìn)電機(jī)控制器進(jìn)行了改進(jìn),使其在具有自動(dòng)和手動(dòng)控制功能的同時(shí),引入限位信號(hào)反饋控制。電機(jī)控制器使用硬件描述語言(HDL)編寫,而限位信號(hào)則由位置感應(yīng)電路中的光電開關(guān)器件自動(dòng)反饋。
2020-04-15 10:03:012369 
步進(jìn)電機(jī)和伺服電機(jī)是工控領(lǐng)域應(yīng)用最廣泛的兩類產(chǎn)品,而它們的核心分別是步進(jìn)電機(jī)控制器與伺服電機(jī)控制器,本文將給大家講解這兩種器件不一樣的地方。
2020-12-14 20:26:092826 步進(jìn)電機(jī)和伺服電機(jī)是工控領(lǐng)域應(yīng)用最廣泛的兩類產(chǎn)品,而它們的核心分別是步進(jìn)電機(jī)控制器與伺服電機(jī)控制器,本文將給大家講解這兩種器件不一樣的地方。
2021-01-31 06:17:2415 介紹基于FPGA 的步進(jìn)電機(jī)控制器的設(shè)計(jì), 在分析步進(jìn)電機(jī)的工作原理的基礎(chǔ)上, 給出了層次化設(shè)計(jì)方案與VHDL程序,并利用Quartus Ⅱ進(jìn)行了仿真并給出了仿真結(jié)果。它以FP GA 作為核心器件
2021-02-05 11:37:0027 RS232串口控制智能步進(jìn)電機(jī)控制器實(shí)驗(yàn)教學(xué)說明。
2021-03-18 10:55:5128 步進(jìn)電機(jī)控制器是一種能夠發(fā)出均勻脈沖信號(hào)并且運(yùn)用范圍廣泛的電機(jī)控制器,步進(jìn)電機(jī)控制器怎么使用?下面就由小編來簡(jiǎn)單介紹一下!
2021-07-19 09:52:577151 本文檔作備份用。摘 要: 設(shè)計(jì)了一種具有多模式的步進(jìn)電機(jī)控制裝置,本裝置基于STC的一款單片機(jī)STC89C52,軟件部分由C51編寫,包含啟停中斷程序、轉(zhuǎn)向中斷程序、步進(jìn)電機(jī)調(diào)速程序以及鍵盤信號(hào)
2021-11-23 16:22:5118 有多種版本的步進(jìn)電機(jī)類型,也有多種版本的步進(jìn)電機(jī)控制器設(shè)計(jì)。本電路是一款使用ICTDA2030作為驅(qū)動(dòng)器的通用步進(jìn)電機(jī)控制器。
2022-06-04 17:17:004225 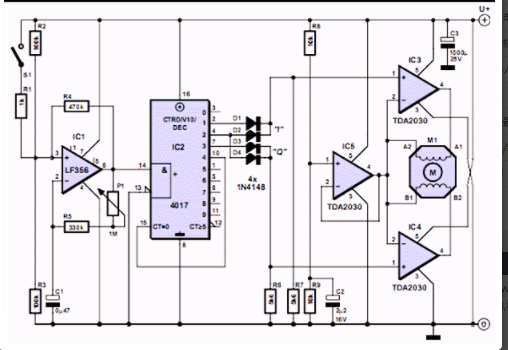
電子發(fā)燒友網(wǎng)站提供《硬盤步進(jìn)電機(jī)速度控制器.zip》資料免費(fèi)下載
2022-07-22 11:29:022 MS35711T 器件是一款步進(jìn)電機(jī)控制器, 它使用外部 N 溝道 MOSFET 來驅(qū)動(dòng)一個(gè)雙極步進(jìn)電機(jī)或兩個(gè)刷式直流電機(jī)。
2022-07-31 10:26:464 電子發(fā)燒友網(wǎng)站提供《PCB設(shè)備步進(jìn)電機(jī)控制器.zip》資料免費(fèi)下載
2022-08-22 16:17:532 電子發(fā)燒友網(wǎng)站提供《如何測(cè)試TB6600步進(jìn)電機(jī)驅(qū)動(dòng)器控制器和步進(jìn)電機(jī).zip》資料免費(fèi)下載
2022-12-06 15:51:087 步進(jìn)電機(jī)是一種特殊的電動(dòng)機(jī),相較于傳統(tǒng)的直流電機(jī)或交流電機(jī),其具有以下幾個(gè)特點(diǎn):
高精度定位:步進(jìn)電機(jī)可以通過控制脈沖信號(hào)來實(shí)現(xiàn)準(zhǔn)確的位置定位,通常可達(dá)到0.9度或更小的步距角度,精度高于傳統(tǒng)電機(jī)。
2023-03-08 14:17:279088 步進(jìn)電機(jī)控制器是一種能夠發(fā)出均勻脈沖信號(hào)的電子產(chǎn)品,它發(fā)出的信號(hào)進(jìn)入步進(jìn)電機(jī)驅(qū)動(dòng)器后,會(huì)由驅(qū)動(dòng)器轉(zhuǎn)換成步進(jìn)電機(jī)所
需要的強(qiáng)電流信號(hào),帶動(dòng)步進(jìn)電機(jī)運(yùn)轉(zhuǎn)。步進(jìn)電機(jī)控制器能夠準(zhǔn)確的控制步進(jìn)電機(jī)轉(zhuǎn)過每一個(gè)
2023-03-23 10:24:221 步進(jìn)電機(jī)控制器是一種專門用于控制步進(jìn)電機(jī)的設(shè)備,可以用來控制步進(jìn)電機(jī)的轉(zhuǎn)速和方向。步進(jìn)電機(jī)控制器通常包括一個(gè)驅(qū)動(dòng)電路板和一個(gè)控制板,驅(qū)動(dòng)電路板用于提供電源和輸出脈沖信號(hào),控制板則用于控制步進(jìn)電機(jī)的運(yùn)行。
步進(jìn)電機(jī)控制器的應(yīng)用設(shè)置一般包括以下幾個(gè)方面:
2023-03-26 22:30:202197 步進(jìn)電機(jī)控制器是一種能夠發(fā)出均勻脈沖信號(hào)的電子產(chǎn)品,它發(fā)出的信號(hào)進(jìn)入步進(jìn)電機(jī)驅(qū)動(dòng)器后,會(huì)由驅(qū)動(dòng)器轉(zhuǎn)換成步進(jìn)電機(jī)
所需要的強(qiáng)電流信號(hào),帶動(dòng)步進(jìn)電機(jī)運(yùn)轉(zhuǎn)。步進(jìn)電機(jī)控制器能夠準(zhǔn)確的控制步進(jìn)電機(jī)轉(zhuǎn)過每一個(gè)
2023-05-05 14:16:038 電子發(fā)燒友網(wǎng)站提供《步進(jìn)電機(jī)控制器的FPGA的實(shí)現(xiàn).pdf》資料免費(fèi)下載
2023-10-07 16:29:171 電子發(fā)燒友網(wǎng)站提供《基于FPGA的步進(jìn)電機(jī)伺服控制器設(shè)計(jì).pdf》資料免費(fèi)下載
2023-10-25 09:10:401 控制,需要使用步進(jìn)電機(jī)控制器。步進(jìn)電機(jī)控制器是一種電子裝置,用于接收和處理控制信號(hào),并將其轉(zhuǎn)換為電機(jī)驅(qū)動(dòng)信號(hào)。通過調(diào)整步進(jìn)電機(jī)控制器的參數(shù)設(shè)置,可以使電機(jī)按照需求進(jìn)行旋轉(zhuǎn),實(shí)現(xiàn)精確的運(yùn)動(dòng)控制。 在進(jìn)行步進(jìn)電
2024-01-19 10:50:225083 步進(jìn)電機(jī)控制器是一種能夠發(fā)出均勻脈沖信號(hào)的電子產(chǎn)品,主要用于控制步進(jìn)電機(jī)的運(yùn)動(dòng)。它發(fā)出的信號(hào)進(jìn)入步進(jìn)電機(jī)驅(qū)動(dòng)器后,會(huì)由驅(qū)動(dòng)器轉(zhuǎn)換成步進(jìn)電機(jī)所需要的強(qiáng)電流信號(hào),帶動(dòng)步進(jìn)電機(jī)運(yùn)轉(zhuǎn)。
2024-02-07 17:57:008565 
引言 步進(jìn)電機(jī)是一種將電脈沖信號(hào)轉(zhuǎn)換為角位移的電機(jī),具有控制精度高、響應(yīng)速度快、結(jié)構(gòu)簡(jiǎn)單等優(yōu)點(diǎn)。在自動(dòng)化設(shè)備、機(jī)器人、數(shù)控機(jī)床等領(lǐng)域得到了廣泛應(yīng)用。步進(jìn)電機(jī)控制器是實(shí)現(xiàn)步進(jìn)電機(jī)控制的關(guān)鍵部件,通過
2024-06-12 09:17:356001 步進(jìn)電機(jī)控制器是一種專門用于控制步進(jìn)電機(jī)運(yùn)行的裝置。步進(jìn)電機(jī)是一種將電脈沖信號(hào)轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開環(huán)控制元件,其運(yùn)行需要由步進(jìn)電機(jī)控制器產(chǎn)生的脈沖信號(hào)來進(jìn)行驅(qū)動(dòng)。這些脈沖信號(hào)不僅決定了步進(jìn)電機(jī)的轉(zhuǎn)動(dòng)方向,還決定了其轉(zhuǎn)動(dòng)的速度和位置。
2024-06-20 16:14:155080 
步進(jìn)電機(jī)控制器是一種專門用于控制步進(jìn)電機(jī)的設(shè)備,它通過發(fā)出脈沖信號(hào)來驅(qū)動(dòng)步進(jìn)電機(jī),實(shí)現(xiàn)對(duì)電機(jī)轉(zhuǎn)動(dòng)角度、速度和方向的精確控制。步進(jìn)電機(jī)控制器通常包括一個(gè)脈沖信號(hào)發(fā)生器、一個(gè)驅(qū)動(dòng)器和一個(gè)控制板。脈沖
2024-06-24 17:12:236469 
DRV8711器件是一個(gè)步進(jìn)電機(jī)控制器,它使用外部 N 溝道 MOSFET 驅(qū)動(dòng)一個(gè)雙極步進(jìn)電機(jī)或兩個(gè)有刷直流電機(jī)。集成了微步進(jìn)索引器,能夠?qū)崿F(xiàn)從全步到 1/256 步的步進(jìn)模式。
使用自適應(yīng)
2025-10-17 15:09:52685 
該DRV8821提供雙微步進(jìn)步進(jìn)電機(jī)控制器/驅(qū)動(dòng)器 打印機(jī)、掃描儀和其他辦公自動(dòng)化設(shè)備應(yīng)用的解決方案。
兩個(gè)獨(dú)立的步進(jìn)電機(jī)驅(qū)動(dòng)電路包括四個(gè) H 橋驅(qū)動(dòng)器和 具有微步進(jìn)功能的索引器邏輯。每個(gè)電機(jī)驅(qū)動(dòng)模塊均采用N溝道功率MOSFET 配置為 H 橋以驅(qū)動(dòng)電機(jī)繞組。
2025-10-21 11:27:34498 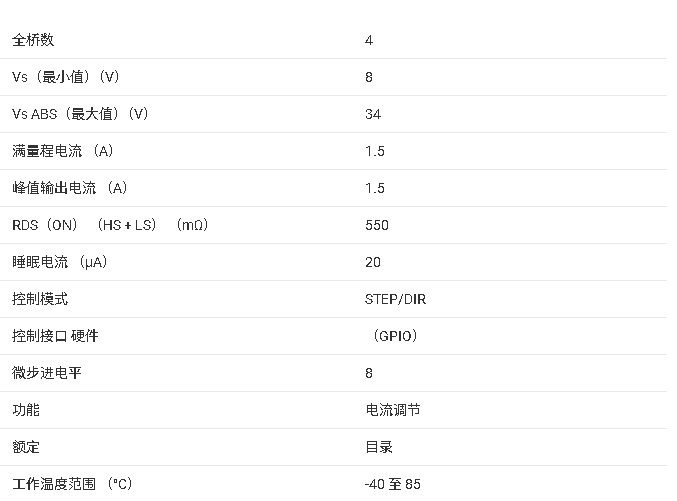
 電子發(fā)燒友App
電子發(fā)燒友App












 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論