長期以來,自動化機器人一直被視為科幻小說中的概念,而如今這一技術已成為現實,并正在大規模部署。在機器人技術領域,自主移動機器人 (AMR) 是發展最快的創新技術之一。
2025-09-03 15:01:44 3892
3892 
隨著科學技術的發展和社會的需要,移動機器人技術得到了迅速發展,正在滲透到各行各業中,使人們的生活更加便利。現今以單片機為核心的移動機器人存在處理數據量有限、控制系統速度低、人機交互機制單一等缺點,不能滿足機器人多任務的要求。
2014-09-30 10:30:022181 自主式移動機器人系統是指根據指令任務及環境信息進行自主路徑規劃,并且在任務執行過程中不斷采集局部環境信息,做出決策,從而實現安全行駛并準確到達目標地點的智能系統。本文以LPC2119為控制核心,介紹了一種輪式移動機器人的設計方案。
2014-11-19 13:42:461683 
一般而言,移動機器人的移動機構主要有輪式移動機構、履帶式移動機構及足式移動機構,此外還有步進式移動機構、蠕動式移動機構、蛇行式移動機構和混合式移動機構,以適應不同的工作環境和場合。
2018-11-27 15:47:108919 叉式移動機器人(AGV/AMR)是在叉車上加載各種導引技術,構建地圖算法,輔以避障安全技術,實現叉車的無人化作業。▲叉式移動機器人無人化作業▲叉式移動機器人常見車型叉式移動機器人在行業初期,各機
2023-08-31 13:24:312559 
? 機器人國產化這句話說了很多年,每每說到工業機器人,仍舊很難不提及“四大家族”。而說到移動機器人,大家熟知的更多是國內幾家在資本市場一路高歌猛進的企業。在移動機器人應用上,國產移動機器人并不遜色也
2022-02-02 06:21:004295 我覺得現在是時候討論一些更有趣的話題,今天的話題是介紹工業機器人、協作機器人和移動機器人。我想每個人都知道機器人是什么。機器人是可怕的大型機器,通常需要關在籠子中,其功能安全要求一般涉及門聯鎖裝置
2018-10-30 11:33:11
機器人設計方案{:7:}分享
2014-06-30 13:12:48
移動機器人常用傳感器
2012-08-20 22:33:40
構建機器人 | 制作移動機器人 | 構建第一個機器人 | 機器人電子 | 機器人控制器 | 機器人傳感器 | 交互機器人選擇運動系統讓我們快速瀏覽一下用于移動機器人的三種主要運動系統。 如果比較表中
2021-09-01 08:12:28
移動機器人運動控制系統設計及控制算法研究
2012-08-20 15:54:16
【摘 要】以嵌入式運動控制體系為基礎,以移動機器人為研究對象,結合三輪結構輪式移動機器人,對二輪差速驅動轉向自主移動機器人運動學和動力學空間模型進行了分析和計算,研究和設計了自主移動機器人電機驅動
2025-06-11 14:30:14
初次使用 NI MyRIO控制器開發四輪全向移動機器人,由四個全向輪和直流電機與增量式編碼器和NI 9001控制器組成,安裝了紅外距離和光電傳感器。驅動板由官方提供的H橋驅動板。NI 9001由
2016-08-21 12:20:22
自動或半自動機器人常常需要嵌入式控制系統,從而能夠結合高度智能化的確定性控制,并且可以方便地連接到不同的傳感器和執行器上。NI提供了多種嵌入式硬件平臺,以滿足復雜系統的需求。從尖端的機器人研究項目直至高級行業應用,NI平臺被證實是高效的機器人解決方案。
2019-11-06 07:50:49
有使用labview控制移動機器人的大佬嘛,在下需要一些myrio資料的講解,希望各位伸出援助之手,拉小弟一把,感激不盡。
2019-03-21 15:12:09
隨著機器人技術的不斷發展,我們可以在許多簡單重復,危險的崗位上看到機器人的身影,移動機器人憑借其在復雜環境下工作,具有自行感知、自行規劃、自我決策功能的能力,它可以在不同的環境中移動并執行任務,在
2023-06-28 09:36:32
移動機器人導航是指移動機器人確定自己在地圖參考系中的位置后,自動規劃出通往地圖參考系中某個目標位置路徑并沿著該路徑到達目標位置點的能力,是移動機器人行動能力的關鍵。
基于整個智能制造的發展
2023-06-28 09:52:41
一種小型移動機器人的控制系統研究
2012-08-20 15:53:10
接觸了移動機器人這么久,我覺得應該寫點什么東西,分享一下最基礎的自己關于移動機器人的理解,也作為筆記總結,留到以后查閱。目前我還是覺得自己剛入門,有時候總想的太多,不如實踐來的更直接,下面總結之前
2021-08-06 06:13:07
目前,全方位移動機器人由于具有出色的靈活性,已經成為RoboCup中型組足球機器人比賽中最理想的選擇。而機器人的運動控制一直以來都是直接影響機器人性能的主要因素,也是移動機器人研究的熱點之一。本文
2019-10-22 07:35:19
了一種輪式移動機器人的設計方案。該機器人系統應用超聲傳感器、光敏傳感器、碰撞傳感器采集外部環境信息,采用PTR2000實現移動機器人與計算機通信,從而實現現場信息的反饋和計算機控制命令的發送。
2020-05-11 06:39:04
,虛擬模型準確地模擬了真實移動機器人的動力學特征 ; 通過對模型的參數修改 ,為實現對真實機器人的最優控制和設計提供了可信的參考方案
2023-09-20 06:24:09
基于Matlab和VR技術的移動機器人建模及仿真
2010-11-18 23:05:34
本文概述了上海交通大學機器人研究所研制的新型遙控移動式排爆機器人PBJ-1的嵌入式控制系統固件的情況。利用嵌入式系統技術開發適合排爆等各類遙控地面移動機器人使用的嵌入式控制系統能夠解決上述種種矛盾。
2021-06-07 06:11:02
題目:基于SLAM的移動機器人設計嵌入式PPT應具有的幾個部分1、有哪些硬件 1)小車 2)STM32F429開發板 3)樹莓派3b+開發板 4)4g通信模塊 5)GPS模塊 6
2021-11-08 06:17:14
其設計是機器人研究的核心。該控制系統通常以MCU、 DSP等為核心,采用上、下位機二級分布式結構。其中上位機一般為PC機,下位機為單片機或DSP等微控制器。但隨著移動機器人的智能化,控制方法的發展,所需
2019-07-30 07:02:31
制作ROS移動機器人地盤摘要概述硬件需求車體設計電路設計程序設計摘要本教程講述如何利用掃地機輪子制作ROS移動機器人地盤。概述原本不打算自己造輪子的,但是網上的移動機器人地盤要么巨貴--對于學生黨
2022-01-14 08:36:54
的滿足實時性快速性的特點。 隨著ARM處理器的出現和發展以及嵌入式系統的發展,移動機器人的實時性快速性要求便能得到很好滿足,現在該技術已經在多種領域得到有效的應用。本文是以SAMSUNG公司一款
2020-11-23 15:08:52
移動機器人是機器人的重要研究領域,人們很早就開始移動機器人的研究。世界上第一臺真正意義上的移動機器人是斯坦福研究院(SRI)的人工智能中心于1966年到1972年研制的,名叫Shakey,它裝備了
2020-05-14 08:15:00
作為一個技術宅,我對機器人和單片機很感興趣。在這里我把自己做過的一款履帶式移動機器人的資料分享給大家。歡迎大家吐槽!同時也希望對做機器人的同學有幫助。 該機器人采用STM32F103RCT6為主
2017-07-27 18:28:18
差速移動機器人軌跡跟蹤控制方法一、引言二·、基礎準備1.去除GPS數據中的壞點2.經緯度與平面坐標系轉換3.差速移動機器人數學建模三、基于PID的差分移動機器人軌跡跟蹤方法1、控制律設計2、航向角
2021-09-01 08:41:30
怎么實現三路超聲波避障移動機器人平臺的設計?
2021-11-10 07:00:11
識別結果時,系統進入卡死狀態。本文引用地址: 航向測量為了使移動機器人能夠沿指定的方向行駛并能修正由外...
2021-12-20 07:16:42
cO 1 為攝像機的焦距f 。 圖1 移動機器人視覺系統的坐標關系 不考慮透鏡畸變, 則由透視投影成像模型為: 式中, Z′= [u, v ]T 為目標特征點P 在圖像坐標系的二維
2019-06-01 08:00:00
商用移動機器人潛力巨大,能夠為設備和服務行業培養廣闊的市場。根據近期研究判斷,預計單單是無人機市場在2022年之前就有機會飆升至18十億美元以上。地面上的移動機器人則能用于眾多領域(工業、商業和家用
2019-08-13 07:29:10
全網最實用的STM32和ROS機器人的串口通信方案小白學移動機器人同名公眾號:小白學移動機器人創作聲明:內容包含虛構創作內容中的情節存在虛構加工,僅供參考全網最實用的STM32和ROS機器人的串口
2021-08-20 06:33:28
小白,剛入行,想請教一下各位大佬,pioneer 3-AT可以使用力矩進行控制嗎?如果不行的話,哪些廠家的輪式移動機器人是開放力矩控制的?
2020-09-22 11:00:09
自主飛行空中機器人設計方案
2013-09-26 13:29:52
什么是移動機器人軟硬件系統問題?移動機器人軟硬件系統有哪些問題呢?
2021-11-11 06:07:42
怎么設計一種室外移動機器人組合導航定位系統?如何實現室外移動機器人組合導航定位系統的硬件設計?如何實現室外移動機器人組合導航定位系統的軟件設計?
2021-04-19 10:50:33
、餐飲服務行業已經應用到了機器人。不過目前,移動機器人都是使用高質量的機載可充電蓄電池組來給自身供電,但是一般只能維持幾個小時,一旦電能耗盡,必須采用人工干預的方式來給機器人充電。如果采用人工充電,那么
2016-01-20 09:39:06
,介紹了一種輪式移動機器人的設計方案。該機器人系統應用超聲傳感器、光敏傳感器、碰撞傳感器采集外部環境信息,采用PTR2000實現移動機器人與計算機通信,從而實現現場信息的反饋和計算機控制命令的發送
2016-07-28 15:02:56
本文針對微小型移動機器人的實時導航定位需求,采用嵌入式系統設計思想,以新型村田公司的MEMS陀螺器件為核心,利用ARM/CPLD構建了一種結構緊湊、低功耗、低成本、通用性強
2009-03-11 17:22:58 56
56 對國內外移動機器人智能導航研究中采用的幾種導航方式進行了對比, 對近幾年發展起來的并已在移動機器人導航研究領域中得到應用的相關技術進行了論述, 對自主式移動機器人導
2009-07-10 08:21:4022 本文分析了輪式移動機器人在運行過程中由于動力學不確定性引起的力矩擾動, 并提出了一種基于傳感器的移動機器人控制方法. 在利用線加速度傳感器實時測量機器人車體加速度信
2009-07-17 08:08:0033 本文針對實際的輪式自主移動機器人軌跡控制和定位問題提出了一種解決方法。利用模糊PID復合控制器實現移動機器人的軌跡控制,利用陀螺、磁羅盤、里程計進行多傳感器融合定位
2009-07-17 10:14:2724 MRC3100系列AMR移動機器人控制器,適用潛伏頂升式、協作(復合)式、輥筒式等差速底盤類型移動機器人,內置激光導航及二維碼導航算法,支持差速底盤運動模型。MRC3100系列自帶豐富的I/O資源
2023-07-11 10:12:02
FRC5000系列叉式移動機器人控制器,適用各類常見的叉式移動機器人,內置激光導航算法,支持單舵輪、雙舵輪底盤運動模型。FRC5000系列自帶豐富的I/O資源和各種通訊接口,支持CANopen
2023-07-11 10:26:45
基于嵌入式視覺的移動式自重構微小型機器人摘要:為了提高微小型移動機器人作業能力,提出了一種新型移動式自重構機器人。機器人包含若干可獨立執行任務
2010-06-07 15:52:3116 智能輪式移動機器人嵌入式控制系統設計
引言
智能移動機器人集成了機械、電子、計算機、自動控制、人工智能等多學科的研究成果,在當前機器人研究領域具
2010-03-01 08:59:512327 
單片機的自動巡線輪式機器人控制系統設計方案
1 引言
輪式移動機器人是機器人研究領域的一項重要內容.它集機械、電子、檢測技術與智能
2010-03-17 10:40:061105 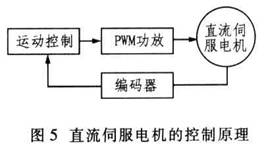
分析了自主移動機器人的功能需求,提出了一種以TMS320F2812、TMS320DM642、TMS320VC5510為微處理器的混合式結構自主移動機器人設計方案。同時對多DSP間高速通信方案進行了探討,對各處理器在系統中的功能和任務進行了分析。分析了自主移動機器人的功能需求,提
2011-02-28 00:48:2636 研究了輪式 移動機器人 (WMR ) 的運動問題, 分析了一種理想滾動情況下航向角控制的差動運動模型. 通過算例證明該方法簡單實用, 在輪式移動機器人的路徑規劃與定位控制中有一定的參
2011-06-28 11:07:2633 提出了一種使雙輪移動機器人在無人為協助時實現其機身從翻倒平臥狀態自行直立的方法. 該方法采用近似陀螺原理,對一高速轉子實施強迫進動,以進動產生的陀螺力矩帶動機器人自行直
2011-06-28 15:42:0991 本文為移動 機器人 設計,實現了自主避障與測距功能。
2011-06-29 16:12:1096 摘要: 采用新型的超聲波傳感器,設計并開發基于ARM9 與嵌入式linux 為平臺的輪式移動機器人平臺的下的未知環境的避障導航系統。本文重點介紹該超聲波傳感器的實現原理以及在
2012-05-11 15:06:293110 
摘要: 針對移動機器人的局部視覺定位問題進行了研究。首先通過移動機器人視覺定位與目標跟蹤系統求出目標質心特征點的位置時間序列, 然后在分析二次成像法獲取目標深度信息的
2012-06-18 14:34:472868 
基于ARM的嵌入式移動機器人控制系統的設計
2015-12-23 15:00:0121 自主式移動機器人系統是指根據指令任務及環境信息進行自主路徑規劃,并且在任務執行過程中不斷采集局部環境信息,做出決策,從而實現安全行駛并準確到達目標地點的智能系統。本文以LPC2119為控制核心,介紹了一種輪式移動機器人的設計方案。
2016-05-30 14:54:252698 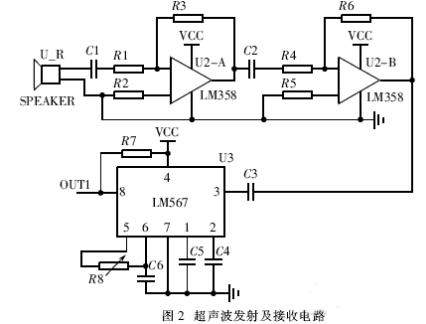
文章以MSP430系列單片機為核心,提出了一種輪式移動機器人的軟硬件設計方案,闡述了其通過傳感器網絡來進行避障、遍歷等自主控制,并實現機器人與PC機間無線控制的方法。
2017-09-07 14:08:042 移動機器人分類 移動機器人從工作環境來分0可分為室內移動機器人和室外移動機器人1按移動方式來分!輪式移動機器人。步行移動機器人。蛇形機器人。履帶式移動機器人。爬行機器人等1按控制體系結構來分!功能式
2017-09-16 09:18:5913 一般來說,輪式移動機器人系統主要包括小車機械結構、驅動系統、傳感器信息采集系統、控制系統、移動機器人運動學模型和路徑跟蹤等,以下分別作些簡要介紹,各部分具體將在后續章節詳細介紹。 2,l移動機器人
2017-09-19 08:35:1216 基于MSP430的自主式移動機器人設計與實現
2017-10-13 09:01:498 分享到:標簽:嵌入式Linux 模糊控制 共享內存 移動機器人 隨著科學技術的發展和社會的需要,移動機器人技術得到了迅速發展,正在滲透到各行各業中,使人們的生活更加便利。現今以單片機為核心
2017-10-16 16:35:260 一、移動機器人的分類 移動機器人從工作環境來分, 可分為室內移動機器人和室外移動機器人; 按移動方式來分: 輪式移動機器人、步行移動機器人、蛇形機器人、履帶式移動機器人、爬行機器人等; 按控制
2017-10-26 11:11:1916 為了提高移動機器人定位精度,提出了一種基于正交編碼器和陀螺儀的輪式移動機器人定位系統,建立機器人的定位模型和運動學模型。研究了支持向量回歸(SVR)算法,為獲得更好的魯棒性,對目標函數誤差平方進行
2017-12-12 14:46:5147 NVIDIA自主機器團隊在新總部大樓內舉辦了首次公眾開放日,吸引了數百名開發人員參與。活動期間,NVIDIA分享了關于Jetson嵌入式計算平臺、全新TensorRT 3推理軟件以及用于自主移動機器人的Redtail人工智能框架的報告。
2017-12-28 18:17:175655 設備、Android手機和Android平板的使用己非常廣泛。為了更加便于人們對遠程設備的使用,本文設計了基于ARM的移動機器人遠程控制系統。該系統主要由搭載了嵌入式的移動機器人小車、Android手機和無線路由器三部分組成。實現了基于Android的移
2018-02-12 15:20:430 許多移動機器人設計基于導軌或尋線傳感器實現 , 其行走路線、 速度與靈活性均受到限制。
2018-04-25 09:53:377 一般而言,移動機器人的移動機構主要有輪式移動機構、履帶式移動機構及足式移動機構,此外還有步進式移動機構、蠕動式移動機構、蛇行式移動機構和混合式移動機構,以適應不同的工作環境和場合。一般室內移動機器人
2018-11-26 10:03:511315 等優點,從而降低了研究的復雜度,得到了國內外學術界的廣泛重視。論文研究了一種基于差速驅動控制的室內輪式移動機器人,并設計了基于DSP和FPGA的輪式移動機器人控制系統。
2019-04-16 08:00:004 介紹了一例非完整約束輪式移動機器人機械結構及控制系統軟硬件的設計。采用美國Cygnal公司新研制的C8051F005 單片機作為機器人控制系統的CPU 及瑞士MAXON 公司的直流伺服電機作為雙輪
2019-06-18 16:51:467 本文針對實際的輪式自主移動機器人軌跡控制和定位問題提出了一種解決方法。利用模糊PID復合控制器實現移動機器人的軌跡控制,利用陀螺、磁羅盤、里程計進行多傳感器融合定位。在計算機仿真和實際的輪式
2019-06-19 17:37:3337 近年來隨著人工智能技術、計算機技術等相關技術的發展,對移動機器人的研究越來越廣泛。本設計是采用OpenWrt操作系統的移動機器人,它可實現多種不同功能,如探測險情、巡視、圖像采集、定位、無線通信等。它還可以作為各種智能控制方法(包括動態避障、路徑規劃、群體協作策略)的良好載體,開展研究。
2020-09-03 16:17:012106 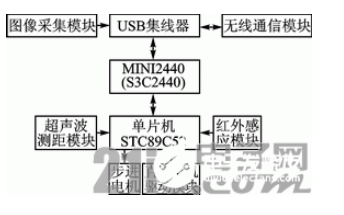
完全可寫的文件系統,從應用程序供應商提供的選擇和配置,并允許您自定義的設備,以適應任何應用程序。 近年來隨著人工智能技術、計算機技術等相關技術的發展,對移動機器人的研究越來越廣泛。本設計是采用OpenWrt操作系統的移動機器人,它可實現多種不同功能,如探測險情、巡視、圖
2020-11-19 14:24:593281 11月20日,騰訊公布了Robotics X實驗室在移動機器人研究方面的新進展,Jamoca和自平衡輪式移動機器人首次對外亮相。 四足移動機器人,也被稱為機器狗。Jamoca本體基于外部提供的硬件
2020-11-27 10:03:212760 ? ? 機器狗、停車AGV、激光slam叉車……,11月新品繽紛!? ?騰訊——四足移動機器人平衡輪式移動機器人11月20日,騰訊Jamoca四足移動機器人和自平衡輪式移動機器人首次對外亮相
2020-12-09 18:20:452965 據介紹,Jamoca 是一款能完成走梅花樁復雜挑戰的四足機器人,而自平衡輪式移動機器人的相關研究成果還入選了機器人行業的頂級會議 IROS 2020。這兩項進展均來自騰訊 Robotics X 實驗室。
2020-12-11 15:20:593314 》、 《工業應用移動機器人通用技術條件》、 《工業應用移動機器人設計通則》 、《工業應用移動機器人通用安全規范》、 《工業應用移動機器人檢測規范》 《工業應用移動機器人數據通信接口規范》六項團體標準在全國團體標準信息平臺正式對外發布并開始實
2020-12-25 09:54:312531 輪式機器人執行巡邏、播種和工業生產等任務是一個強非線性的間歇過程。針對重復運行的輪式機器人軌跡跟蹤問題,本文提出了一種基于數據驅動的高階迭代學習控制算法。首先,對輪式移動機器人的模型進行推導設計,并
2021-04-20 16:10:4914 隨著越來越多企業進入到移動機器人領域,目前移動機器人領域的競爭將會越來越激烈,但對整個服務機器人產業而言,移動機器人低成本化已勢在必行。而作為移動機器人必不可少的硬件——移動機器人底盤雖然是眾多
2021-06-16 17:12:314163 便攜式自動割膠機器人設計方案
2021-06-30 16:37:3818 新型手術制孔機器人設計方案
2021-07-05 14:45:3511 接觸了移動機器人這么久,我覺得應該寫點什么東西,分享一下最基礎的自己關于移動機器人的理解,也作為筆記總結,留到以后查閱。目前我還是覺得自己剛入門,有時候總想的太多,不如實踐來的更直接,下面總結之前
2021-10-21 12:36:073 但凡涉及到可移動的機器人的導航系統,大概率會涉及到里程計的計算,比如輪式移動機器人、無人機、無人艇,以及多足機器人等,而計算里程計的方案也有很多種,比如基于編碼器合成里程計的方案、基于視覺的里程計
2023-04-19 10:17:523106 在室內外移動機器人產業浪潮的推動下,移動機器人市場持續升溫,行業分工作業將機器人分為機器人行業應用端與模塊化機器人底盤 。
模塊化移動機器人底盤承載了機器人自身的定位,導航及避障功能,實現機器人實現智能行走,在模塊化移動機器人中目前主要有哪幾種機器人結構呢?
2022-12-14 10:58:572728 
移動機器人介紹:移動機器人(AutomaticMobileRobot)是一種自動執行工作的機器裝置。它既可以接受人類指揮,又可以運行預先編排的程序,通過軟件控制行動。如今,移動機器人在不同的商業領域
2023-03-13 14:06:094393 
叉式移動機器人(AGV/AMR)是一種常見的移動機器人類型,它擺脫傳統的人車操作,自動導航行駛,具有強大的柔性和智能性。叉式移動機器人(AGV/AMR)不同于傳統叉車,它無需人工駕駛運行。具有智能化
2023-06-05 15:34:522406 
電子發燒友網站提供《基于嵌入式移動機器人無線通訊系統的實現.pdf》資料免費下載
2023-10-13 09:16:050
 電子發燒友App
電子發燒友App
















 工商網監
工商網監
評論