 從概念到落地:靈巧手為何是人形機器人產業化的決勝環節?
從概念到落地:靈巧手為何是人形機器人產業化的決勝環節?

人形機器人被譽為下一代通用型機器人平臺,其終極目標是能夠無縫接入人類環境,使用人類工具,執行多樣化任務。然而,能否“靈巧”地操作物體,成為區分概念Demo與實用產品的關鍵。靈巧手的性能,直接決定了人形機器人在工業精密裝配、特種環境作業、高端商業服務等場景下的實用價值與經濟回報。攻克靈巧手技術,就是打通人形機器人產業化的“最后一公里”。
一、驅動技術演進——從機械復現到仿生創新
驅動系統是靈巧手的“肌肉”,其設計需要在力量、速度、精度、體積、重量和成本之間取得極致平衡。
1.1前沿突破:剛柔耦合與可變剛度:
仿生驅動:借鑒人體肌肉-肌腱原理,采用氣動人工肌肉(PAM)、介電彈性體致動器(DEA)或形狀記憶合金(SMA)。這些技術能提供類似生物肌肉的柔軟性、高功率密度和自然順應性,在抓取易碎物、實現安全人機交互方面優勢顯著(來源:Science Robotics 期刊多項研究)。
二、感知系統融合——從“有無”到“理解”
靈巧操作離不開對物體和環境的深度感知。單一的力覺已無法滿足需求,多模態傳感融合是必然趨勢。
觸覺感知的升級:
高密度電子皮膚:在指腹、手掌等關鍵區域集成分布式觸覺傳感器陣列,實時獲取壓力、振動、溫度甚至紋理信息。例如,中國科學院某所研制的仿生觸覺傳感器已能實現毫米級的空間分辨力和毫秒級的響應速度。
三維力覺感知:不僅能感知接觸點的壓力大小,還能感知力的方向和力矩,為精細化操作(如擰螺絲、插拔接口)提供直接反饋。
“手眼觸”協同感知:
靈巧手的智能體現在將視覺(RGB-D相機)、觸覺和本體感知(關節位置、力矩) 信息深度融合。視覺提供宏觀規劃和初始定位,觸覺負責精細調整和力控。例如,在抓取透明或反光物體時,視覺可能失效,觸覺成為唯一可靠的感知源。
基于深度學習的信息融合算法,能讓機器人建立起物理交互的場景理解,預測物體在操作下的狀態變化。
三、控制智能躍遷——從程序化到自適應
控制系統是靈巧手的“小腦”,負責將感知轉化為毫秒級的精準動作。
從模型驅動到數據驅動:
模仿學習:通過動作捕捉系統記錄人類專家完成復雜操作(如插花、組裝樂高)的手部運動數據,讓機器人直接學習動作軌跡和力控模式。這大幅降低了復雜技能的編程門檻。
強化學習:在高度逼真的物理仿真環境中,讓靈巧手通過千萬次的自主試錯,學習針對不同物體的抓取和操作策略。突破性的 “Sim-to-Real” 技術致力于將仿真中習得的策略無損遷移到實體機器人上。
大腦-小腦分層架構:
高層“大腦” (通常基于AI大模型):負責任務分解和語義理解(如“倒一杯水”)。
底層“小腦” (專用控制回路):負責將抽象指令轉化為關節電機或驅動器的具體控制命令,并基于實時傳感反饋進行高速閉環微調,確保穩定性和安全性。
結論:系統性創新與生態共建是破局關鍵
-
人形機器人
+關注
關注
7文章
1015瀏覽量
18525 -
靈巧手
+關注
關注
0文章
57瀏覽量
322
發布評論請先 登錄
靈巧手觸覺感知技術深度報告:從“單點感知”到“觸覺成像”

人形機器人“靈巧手”,正在接近27個自由度的人手

空心杯電機,為何成為人形機器人靈巧手的 “香餑餑”?

直播回顧丨聚焦 “場景落地” ,虹科直播帶您解鎖高自由度靈巧手核心技術!

電子谷機器人線束|人形機器人“神經脈絡”,穩定護航產業化

人形機器人市場火爆!雷賽智能重磅推出“20自由度”靈巧手方案
MPS角度傳感器MAQ600A在靈巧手和機器人中的應用優勢
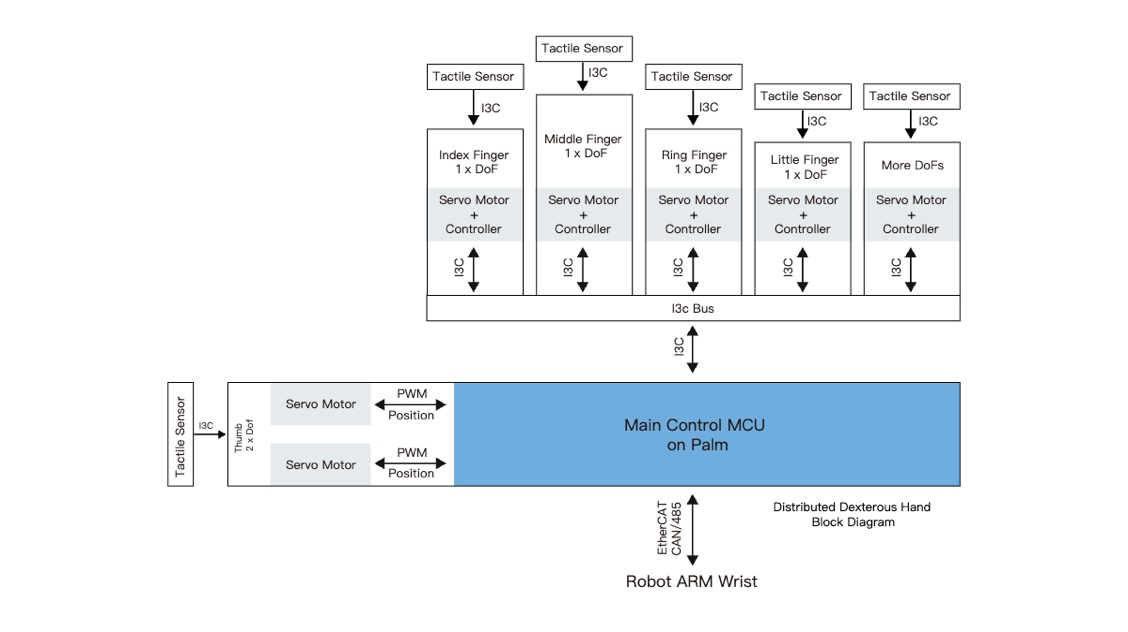
基于I3C分布式總線架構的人形機器人靈巧手方案
年均增長64.6%,機器人靈巧手賽道高燃爆發

我國發布全球首款輕量化重載機器人仿生靈巧手

藍思科技:今年承接智元機器人全系列多款人形機器人業務
虹科分享 功夫機器人來了!CMG擂臺之上的技術決勝點是什么?
價值量占人形機器人超30%,十大國產靈巧手方案匯總
松山湖中國IC峰會圓桌論壇:具身智慧機器人的產業化落地有多難?




 工商網監
工商網監
評論