 靈巧手觸覺感知技術深度報告:從“單點感知”到“觸覺成像”
靈巧手觸覺感知技術深度報告:從“單點感知”到“觸覺成像”

電子發燒友網報道(文/莫婷婷)隨著人形機器人產業從“運動控制”向“精細操作”跨越,靈巧手已成為決定機器人能否真正融入人類生活與生產場景的關鍵部件。而賦予靈巧手“靈魂”的核心,在于其感知系統——尤其是觸覺傳感器。
本報告將系統梳理靈巧手的功能需求、主流廠商技術進展、硬件架構拆解,并重點聚焦感知系統的演進路徑與傳感器選型,結合2026年春晚等標志性事件,揭示中國乃至全球靈巧手傳感技術的突破方向與未來趨勢。
靈巧手功能分類
靈巧手是模仿人類手部結構與功能的機器人末端執行器,具備多自由度、高靈活性、強適應性,且隨著AI技術的賦能,靈巧手還將具備自適應與學習能力。進一步說,它不僅是抓取工具,更是機器人與物理世界交互的“神經末梢”,其主要功能包括抓取等基礎功能,以及觸覺感知、力覺感知等感知功能,獲取抓取物體的性能等物理信息。
 ?
?
圖:智元機器人OmniHand Pro專業款靈巧手關節結構命名與傳感器布局示意圖
不同功能對靈巧手的性能指標都有一定的需求,需要在力量、精度、速度、穩定性、成本、重量、可靠性之間取得平衡,例如抓取雞蛋等物品時對觸覺分辨率、力覺精度有較高的要求,避免對物品造成損害;面向在工廠抓取大件物品的靈巧手,對負載能力、自由度、活動范圍有較高的需求。
 ?
?
圖:靈巧手功能分類及性能指標
靈巧手感知系統與傳感器技術方案
靈巧手主要由驅動系統、傳動系統、感知系統組成。其中感知系統可分為內部感知和外部感知兩大模塊。內部感知系統負責監測手部運動狀態,包括關節角度、扭矩、腱張力等;外部感知系統感知環境與物體屬性,包括接觸力、溫度、紋理、滑移狀態等。
從傳感器的分類來看,觸覺傳感器、位置傳感器、張力傳感器、力矩傳感器是被重點關注的四大類傳感器。本次報告將重點分析觸覺傳感器。
靈巧手觸覺傳感器的技術方案呈現“百花齊放、多路線并行”的格局,尚未形成單一壟斷標準。柔性觸覺傳感器品類眾多,按照工作原理分為壓阻、電容、壓電、電磁式霍爾效應、光學和視觸覺等。
壓阻式觸覺傳感器
壓阻式觸覺傳感的原理是外力導致導電材料(如碳納米管、石墨烯復合材料)電阻發生變化。其制造工藝最成熟,供應鏈完善,市場份額也比較大,但是容易受到溫度干擾,可用于對成本敏感或對極高精度要求不極端的工業場景。
電容式柔性觸覺傳感器
電容式柔性觸覺傳感器靈敏度高、響應速度快、易于陣列化集成,但是容易受到周圍導電物體的電容干擾。在應用方面,開普勒的先行者K人形機器人指尖采用的電容式陣列式傳感器,單指尖配備96個傳感單元,可搬運、抓取物體等。
壓電式觸覺傳感器
壓電式觸覺傳感電子皮膚利用壓電材料在受力時產生電荷的特性來實現觸覺感知,具備高頻響應快的優勢,適用于檢測振動、滑移起始瞬間等動態事件,但是無法檢測靜態力,因此通常與其他傳感器共同使用。
霍爾效應觸覺傳感器
霍爾效應觸覺傳感器通過磁鐵與霍爾元件的相對位移檢測磁場變化,從而推算受力形變,其優點是力感知靈敏度高,易于實現高精度的三維力(Fx, Fy, Fz)解算。目前在高動態、抗沖擊的機器人中應用較多。
代表產品例如帕西尼在2025年8月推出的第三代多維觸覺傳感器矩陣 PX-6AX-GEN3是全球首創6D霍爾陣列式觸覺傳感技術,支持1000Hz 頻率輸出六維力(三維力+三維力矩),測量精度達到0.01N,全量程 <0.5%FS 級重復精度。
光學式觸覺傳感器
光學式觸覺傳感器通過將施加的壓力轉化為光信號強度、波長等光學特性的變化,進而實現對壓力的精確檢測,具備高分辨率且不受電磁干擾的優勢,但容易受溫度波動影響。
視觸覺傳感器
視觸覺傳感器結合光學成像與觸覺感知的傳感方法,是接下來主要的技術路線之一。原理是在彈性體內嵌入微型攝像頭或光纖,通過捕捉內部標記點的位移或光強變化,結合AI視覺算法重建接觸面的三維形貌和力分布。具有超高空間分辨率的特點,易集成,抗干擾能力強。但是體積較大、計算量大、成本高,響應速度受幀率限制。
盡管不同技術路線各具優劣,企業通常需結合應用場景與成本預算進行組合選型,但大幅提升觸覺傳感器密度以追求極致擬人化與靈活性,已成為靈巧手發展的明確趨勢。
主流廠商正通過激增的傳感器數量來構建更細膩的感知網絡,例如特斯拉其新一代 Optimus 靈巧手顯著增加了觸覺傳感器的布局,覆蓋全手。宇樹科技新一代靈巧手Dex 5的傳感器數量從上一代的33個激增至 94個,增加近3倍。
 ?
?
圖:宇樹Dex5-1靈巧手配備94個觸覺傳感器
ORCA Dexterity更是將這一趨勢推向極致,其最新開源的 Touch版本單只手密布高達 351個 觸覺單元。每個單元不僅能輸出完整的三維力矢量(同時感知法向力、剪切力與滑移),更具備0.1牛頓的超高靈敏度與 1毫米的空間分辨率,更適用于輕柔抓取、滑移檢測及精密裝配等精細操作任務。
從幾十到數百個傳感器的演進,靈巧手正從“粗略感知”邁向“高分辨率觸覺成像”的新階段。
按照技術路線不同,主流的靈巧手觸覺感知技術路線分為三種:力/力矩傳感器,柔性傳感器、基于視覺的觸覺傳感器(簡稱“視觸覺”)。
力/力矩傳感器按照工作原理包括上述提到的電阻應變式、壓電式、電容式等,按照測量維度(自由度)分為單軸傳感器 (1-DOF)、多軸力傳感器 (2-DOF / 3-DOF)、六維力/力矩傳感器 (6-DOF)等。
柔性傳感器指的是由柔性材料制造的電子皮膚。
觸覺傳感器正如上述提到的:基于視覺的觸覺傳感器,簡稱“視觸覺”,預計今年會有不少企業在該技術上取得突破。
就在近期,緯鈦機器人發布了四款視觸覺新品,包括全球首發超小尺寸、超高分辨率、超高頻率視觸覺仿生指尖 GF515。GF515具備超小尺寸、超高分辨率和超高頻率,尺寸僅為15×27mm,體重小于15g,每平方厘米上萬點的觸覺信息密度,最小可探測10微米級的紋理細節,并能同時探測法向力、切向力、扭矩等多維力信息以及滑移狀態等。分辨率達到10微米級、毫秒級延遲。
此外還有一種備受關注的技術路線:MEMS傳感器。MEMS傳感器指的是基于半導體工藝制造的微型應變制作而成的微型傳感器。但從目前產業的進度來看,還未有成熟的量產且規模化的產品,多數處于技術攻堅、研發階段。
 ?
?
圖:部分靈巧手觸覺感知方案及其性能
從當前部分靈巧手觸覺感知方案來看,未來靈巧手觸覺技術的競爭,將不再局限于單一傳感器性能,而是圍繞 感知維度、響應速度、算法融合、成本可控等多維平衡展開。例如兆威機電將電機、編碼器、力傳感器高度集成于手指關節,打造“機電一體化”模塊,推動結構緊湊化與功能內嵌化;帕西尼 DexH5主打單指集成多顆TFTPS多維磁通門傳感器,在有限空間內實現高靈敏度力控,突出微型化與高精度并重。
場景分化下的商用靈巧手的性能升級
為拓展人形機器人應用場景,企業正加速迭代靈巧手技術,升級感知方案。
以特斯拉Optimus為例:第一代到第三代靈巧手的驅動方案采用的都是空心杯電機+行星減速器,傳動方案由前兩代的渦輪蝸桿,升級為第三代的絲杠+腱繩,自由度由前兩代的11個,增加至第三代的22個,且感知方案也逐漸升級。
具體來看,2022年10月發布第一代靈巧手Optimus Gen1,2023年12月公布第二代,在指尖引入觸覺傳感器實現觸覺突破,通過力反饋彌補純視覺在抓取光滑易碎物體(如雞蛋)時的局限,實現精準力控。
在今年AWE 2026首秀的第三代Optimus Gen3,預計靈巧手自由度翻倍至22個、驅動外置化(電機移至前臂以減輕手部重量)、腱繩傳動以及觸覺感知全覆蓋,解決重量分布均衡問題并大幅提升操作靈活性;將觸覺傳感器覆蓋全手,能夠完成穿針引線等亞毫米級精細操作,并集成AI視覺系統,深度集成特斯拉FSD自動駕駛技術。
 ?
?
特斯拉第一代靈巧手的拆解圖(圖源:申萬宏源研究)
2026年,國內人形機器人以登上春晚的形式再次“出圈”,從2025年宇樹機器人的扭秧歌,到2026年春晚的疊衣服、武術、跳舞等表演,再到仿生機器人,人形機器人隨著技術的迭代,加速跨越從“動態平衡”到“精細操作”的鴻溝,靈巧手也不再僅僅是執行簡單抓取的機械夾具,而是進化為具備高分辨率觸覺感知與自適應力控能力的“智能感官”。
魔法原子機器人MagicBot Gen1用靈巧手現場撈面、斟酒。根據官方介紹,MagicBot Gen1全身擁有42個自由度設計,單臂搬運負載≥7.5kg,全身靜態負載達40kg。
魔法原子自研的靈巧手MagicHand S01,手部負載高達5公斤,作業場景下最高負載超20公斤,力分辨率最高可達0.1N。單手11個自由度(6個主動自由度,5個被動自由度),搭載了5個分辨率為0.1N的觸覺傳感器。
銀河通用機器人在節目中撿起玻璃碎片、盤核桃,實現靈巧操作。其背后基于銀河通用自主研發的集成“大腦-小腦-神經控制”于一模的全身全手端到端大模型——“銀河星腦 AstraBrain”,銀河通用將靈巧手神經動力小腦模型賦能來自 Sharpa的靈巧手硬件,實現對復雜物品的精細操控。
 ?
?
據介紹,Sharpa由禾賽科技三位創始人聯合創立的企業,其推出的Wave靈巧手具備22個主動自由度,包括15個彎曲與伸展自由度,6個側向移動自由度,1個向內旋轉自由度。與傳統機械手指關節僅能單向彎曲、缺乏橫向調節能力的局限不同,Wave 通過增加6個側向自由度賦予了手指在抓取過程中靈活橫向展開或聚攏的能力。
 ?
?
圖:Wave靈巧手
可以看到,不管是硬件升級還是AI大模型賦能,靈巧手正加速邁向“會感、會想、會適應”的具身智能新階段,逐步突破操作精度、環境適應性和任務泛化能力的瓶頸。
電子發燒友網統計了魔法原子、宇樹科技、松延動力、銀河通用的部分人形機器人靈巧手性能指標看到,在商業應用上,大部分靈巧手的自由度集中在10至22個之間。
 ?
?
其中銀河通用采用的Sharpa Wave達到22 DoF,是統計的企業中最高水平,包括15個彎曲與伸展自由度、6個側向移動自由度、1個向內旋轉自由度,并且通過搭載DAZA1動態觸覺陣列,實現單指尖>20牛頓,所有手勢的快速移動速度>4赫茲,追求“類人手”自然運動。
在科研、精密裝配高端場景的需求正推動靈巧手向20+自由度演進;而家庭服務、教育等中低端場景仍以11 DoF為主,兼顧成本與實用性。此外,部分靈巧手產品已附帶電子皮膚,例如松延動力的仿生機器人,用以提升靈巧手的精確度和適應性。
另一個值得關注的是,部分靈巧手增加了軟件,具備持續進化潛力,例如銀河通用通過大模型的加持,實現軟件定義感知能力。
本報告將系統梳理靈巧手的功能需求、主流廠商技術進展、硬件架構拆解,并重點聚焦感知系統的演進路徑與傳感器選型,結合2026年春晚等標志性事件,揭示中國乃至全球靈巧手傳感技術的突破方向與未來趨勢。
靈巧手功能分類
靈巧手是模仿人類手部結構與功能的機器人末端執行器,具備多自由度、高靈活性、強適應性,且隨著AI技術的賦能,靈巧手還將具備自適應與學習能力。進一步說,它不僅是抓取工具,更是機器人與物理世界交互的“神經末梢”,其主要功能包括抓取等基礎功能,以及觸覺感知、力覺感知等感知功能,獲取抓取物體的性能等物理信息。
?圖:智元機器人OmniHand Pro專業款靈巧手關節結構命名與傳感器布局示意圖
不同功能對靈巧手的性能指標都有一定的需求,需要在力量、精度、速度、穩定性、成本、重量、可靠性之間取得平衡,例如抓取雞蛋等物品時對觸覺分辨率、力覺精度有較高的要求,避免對物品造成損害;面向在工廠抓取大件物品的靈巧手,對負載能力、自由度、活動范圍有較高的需求。
?圖:靈巧手功能分類及性能指標
靈巧手感知系統與傳感器技術方案
靈巧手主要由驅動系統、傳動系統、感知系統組成。其中感知系統可分為內部感知和外部感知兩大模塊。內部感知系統負責監測手部運動狀態,包括關節角度、扭矩、腱張力等;外部感知系統感知環境與物體屬性,包括接觸力、溫度、紋理、滑移狀態等。
從傳感器的分類來看,觸覺傳感器、位置傳感器、張力傳感器、力矩傳感器是被重點關注的四大類傳感器。本次報告將重點分析觸覺傳感器。
靈巧手觸覺傳感器的技術方案呈現“百花齊放、多路線并行”的格局,尚未形成單一壟斷標準。柔性觸覺傳感器品類眾多,按照工作原理分為壓阻、電容、壓電、電磁式霍爾效應、光學和視觸覺等。
壓阻式觸覺傳感器
壓阻式觸覺傳感的原理是外力導致導電材料(如碳納米管、石墨烯復合材料)電阻發生變化。其制造工藝最成熟,供應鏈完善,市場份額也比較大,但是容易受到溫度干擾,可用于對成本敏感或對極高精度要求不極端的工業場景。
電容式柔性觸覺傳感器
電容式柔性觸覺傳感器靈敏度高、響應速度快、易于陣列化集成,但是容易受到周圍導電物體的電容干擾。在應用方面,開普勒的先行者K人形機器人指尖采用的電容式陣列式傳感器,單指尖配備96個傳感單元,可搬運、抓取物體等。
壓電式觸覺傳感器
壓電式觸覺傳感電子皮膚利用壓電材料在受力時產生電荷的特性來實現觸覺感知,具備高頻響應快的優勢,適用于檢測振動、滑移起始瞬間等動態事件,但是無法檢測靜態力,因此通常與其他傳感器共同使用。
霍爾效應觸覺傳感器
霍爾效應觸覺傳感器通過磁鐵與霍爾元件的相對位移檢測磁場變化,從而推算受力形變,其優點是力感知靈敏度高,易于實現高精度的三維力(Fx, Fy, Fz)解算。目前在高動態、抗沖擊的機器人中應用較多。
代表產品例如帕西尼在2025年8月推出的第三代多維觸覺傳感器矩陣 PX-6AX-GEN3是全球首創6D霍爾陣列式觸覺傳感技術,支持1000Hz 頻率輸出六維力(三維力+三維力矩),測量精度達到0.01N,全量程 <0.5%FS 級重復精度。
光學式觸覺傳感器
光學式觸覺傳感器通過將施加的壓力轉化為光信號強度、波長等光學特性的變化,進而實現對壓力的精確檢測,具備高分辨率且不受電磁干擾的優勢,但容易受溫度波動影響。
視觸覺傳感器
視觸覺傳感器結合光學成像與觸覺感知的傳感方法,是接下來主要的技術路線之一。原理是在彈性體內嵌入微型攝像頭或光纖,通過捕捉內部標記點的位移或光強變化,結合AI視覺算法重建接觸面的三維形貌和力分布。具有超高空間分辨率的特點,易集成,抗干擾能力強。但是體積較大、計算量大、成本高,響應速度受幀率限制。
盡管不同技術路線各具優劣,企業通常需結合應用場景與成本預算進行組合選型,但大幅提升觸覺傳感器密度以追求極致擬人化與靈活性,已成為靈巧手發展的明確趨勢。
主流廠商正通過激增的傳感器數量來構建更細膩的感知網絡,例如特斯拉其新一代 Optimus 靈巧手顯著增加了觸覺傳感器的布局,覆蓋全手。宇樹科技新一代靈巧手Dex 5的傳感器數量從上一代的33個激增至 94個,增加近3倍。
?圖:宇樹Dex5-1靈巧手配備94個觸覺傳感器
ORCA Dexterity更是將這一趨勢推向極致,其最新開源的 Touch版本單只手密布高達 351個 觸覺單元。每個單元不僅能輸出完整的三維力矢量(同時感知法向力、剪切力與滑移),更具備0.1牛頓的超高靈敏度與 1毫米的空間分辨率,更適用于輕柔抓取、滑移檢測及精密裝配等精細操作任務。
從幾十到數百個傳感器的演進,靈巧手正從“粗略感知”邁向“高分辨率觸覺成像”的新階段。
按照技術路線不同,主流的靈巧手觸覺感知技術路線分為三種:力/力矩傳感器,柔性傳感器、基于視覺的觸覺傳感器(簡稱“視觸覺”)。
力/力矩傳感器按照工作原理包括上述提到的電阻應變式、壓電式、電容式等,按照測量維度(自由度)分為單軸傳感器 (1-DOF)、多軸力傳感器 (2-DOF / 3-DOF)、六維力/力矩傳感器 (6-DOF)等。
柔性傳感器指的是由柔性材料制造的電子皮膚。
觸覺傳感器正如上述提到的:基于視覺的觸覺傳感器,簡稱“視觸覺”,預計今年會有不少企業在該技術上取得突破。
就在近期,緯鈦機器人發布了四款視觸覺新品,包括全球首發超小尺寸、超高分辨率、超高頻率視觸覺仿生指尖 GF515。GF515具備超小尺寸、超高分辨率和超高頻率,尺寸僅為15×27mm,體重小于15g,每平方厘米上萬點的觸覺信息密度,最小可探測10微米級的紋理細節,并能同時探測法向力、切向力、扭矩等多維力信息以及滑移狀態等。分辨率達到10微米級、毫秒級延遲。
此外還有一種備受關注的技術路線:MEMS傳感器。MEMS傳感器指的是基于半導體工藝制造的微型應變制作而成的微型傳感器。但從目前產業的進度來看,還未有成熟的量產且規模化的產品,多數處于技術攻堅、研發階段。
?圖:部分靈巧手觸覺感知方案及其性能
從當前部分靈巧手觸覺感知方案來看,未來靈巧手觸覺技術的競爭,將不再局限于單一傳感器性能,而是圍繞 感知維度、響應速度、算法融合、成本可控等多維平衡展開。例如兆威機電將電機、編碼器、力傳感器高度集成于手指關節,打造“機電一體化”模塊,推動結構緊湊化與功能內嵌化;帕西尼 DexH5主打單指集成多顆TFTPS多維磁通門傳感器,在有限空間內實現高靈敏度力控,突出微型化與高精度并重。
場景分化下的商用靈巧手的性能升級
為拓展人形機器人應用場景,企業正加速迭代靈巧手技術,升級感知方案。
以特斯拉Optimus為例:第一代到第三代靈巧手的驅動方案采用的都是空心杯電機+行星減速器,傳動方案由前兩代的渦輪蝸桿,升級為第三代的絲杠+腱繩,自由度由前兩代的11個,增加至第三代的22個,且感知方案也逐漸升級。
具體來看,2022年10月發布第一代靈巧手Optimus Gen1,2023年12月公布第二代,在指尖引入觸覺傳感器實現觸覺突破,通過力反饋彌補純視覺在抓取光滑易碎物體(如雞蛋)時的局限,實現精準力控。
在今年AWE 2026首秀的第三代Optimus Gen3,預計靈巧手自由度翻倍至22個、驅動外置化(電機移至前臂以減輕手部重量)、腱繩傳動以及觸覺感知全覆蓋,解決重量分布均衡問題并大幅提升操作靈活性;將觸覺傳感器覆蓋全手,能夠完成穿針引線等亞毫米級精細操作,并集成AI視覺系統,深度集成特斯拉FSD自動駕駛技術。
?特斯拉第一代靈巧手的拆解圖(圖源:申萬宏源研究)
2026年,國內人形機器人以登上春晚的形式再次“出圈”,從2025年宇樹機器人的扭秧歌,到2026年春晚的疊衣服、武術、跳舞等表演,再到仿生機器人,人形機器人隨著技術的迭代,加速跨越從“動態平衡”到“精細操作”的鴻溝,靈巧手也不再僅僅是執行簡單抓取的機械夾具,而是進化為具備高分辨率觸覺感知與自適應力控能力的“智能感官”。
魔法原子機器人MagicBot Gen1用靈巧手現場撈面、斟酒。根據官方介紹,MagicBot Gen1全身擁有42個自由度設計,單臂搬運負載≥7.5kg,全身靜態負載達40kg。
魔法原子自研的靈巧手MagicHand S01,手部負載高達5公斤,作業場景下最高負載超20公斤,力分辨率最高可達0.1N。單手11個自由度(6個主動自由度,5個被動自由度),搭載了5個分辨率為0.1N的觸覺傳感器。
銀河通用機器人在節目中撿起玻璃碎片、盤核桃,實現靈巧操作。其背后基于銀河通用自主研發的集成“大腦-小腦-神經控制”于一模的全身全手端到端大模型——“銀河星腦 AstraBrain”,銀河通用將靈巧手神經動力小腦模型賦能來自 Sharpa的靈巧手硬件,實現對復雜物品的精細操控。
?據介紹,Sharpa由禾賽科技三位創始人聯合創立的企業,其推出的Wave靈巧手具備22個主動自由度,包括15個彎曲與伸展自由度,6個側向移動自由度,1個向內旋轉自由度。與傳統機械手指關節僅能單向彎曲、缺乏橫向調節能力的局限不同,Wave 通過增加6個側向自由度賦予了手指在抓取過程中靈活橫向展開或聚攏的能力。
?圖:Wave靈巧手
可以看到,不管是硬件升級還是AI大模型賦能,靈巧手正加速邁向“會感、會想、會適應”的具身智能新階段,逐步突破操作精度、環境適應性和任務泛化能力的瓶頸。
電子發燒友網統計了魔法原子、宇樹科技、松延動力、銀河通用的部分人形機器人靈巧手性能指標看到,在商業應用上,大部分靈巧手的自由度集中在10至22個之間。
?其中銀河通用采用的Sharpa Wave達到22 DoF,是統計的企業中最高水平,包括15個彎曲與伸展自由度、6個側向移動自由度、1個向內旋轉自由度,并且通過搭載DAZA1動態觸覺陣列,實現單指尖>20牛頓,所有手勢的快速移動速度>4赫茲,追求“類人手”自然運動。
在科研、精密裝配高端場景的需求正推動靈巧手向20+自由度演進;而家庭服務、教育等中低端場景仍以11 DoF為主,兼顧成本與實用性。此外,部分靈巧手產品已附帶電子皮膚,例如松延動力的仿生機器人,用以提升靈巧手的精確度和適應性。
另一個值得關注的是,部分靈巧手增加了軟件,具備持續進化潛力,例如銀河通用通過大模型的加持,實現軟件定義感知能力。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
機器人
+關注
關注
213文章
31240瀏覽量
223078 -
靈巧手
+關注
關注
0文章
57瀏覽量
318
發布評論請先 登錄
相關推薦
熱點推薦
靈巧手驅動技術深度報告:空心杯電機黃金賽道,高壁壘與高增長并存
。 ? 當前,行業內對于驅動方案的探索呈現出百花齊放的態勢,各種技術路線各有優劣。本報告將深入分析靈巧手的結構分類、主流驅動技術方案及其對比,并結合典型產品案例與企業最新動態,探討

人形機器人“靈巧手”,正在接近27個自由度的人手
主要有三大核心組件,驅動、傳動和傳感。驅動主要是空心杯電機等微型電機;傳動上主要有連桿傳動、腱繩傳動和齒輪傳動;此外,觸覺傳感器則讓手具有感知能力。 在靈巧手領域,不少人形機器人企業以及靈巧手

帕西尼感知科技完成超10億B輪融資,估值超百億
加碼。 作為以多維觸覺傳感技術為核心的具身智能公司,帕西尼聚焦解決機器人“觸覺”短板。其自研6D霍爾陣列觸覺傳感技術可實時

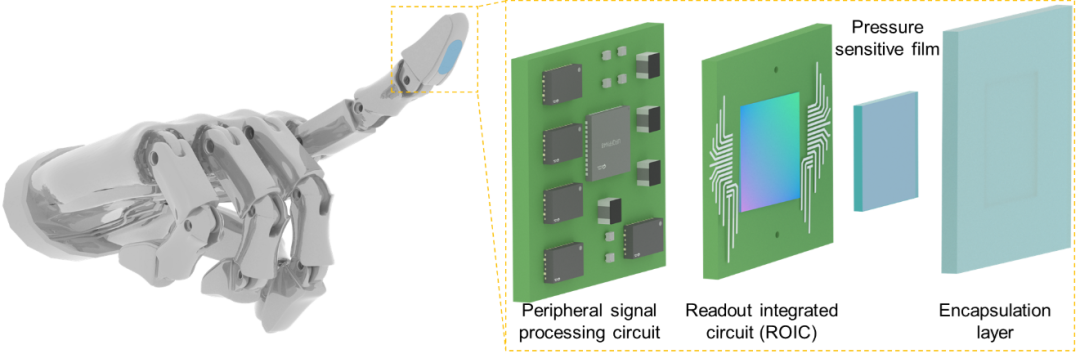
西湖大學:研發CMOS兼容壓力傳感器陣列,實現精準觸覺感知功能
的靈巧手上集成高密度觸覺傳感器,可賦予機器人精細操作能力。 目前,觸覺傳感技術領域存在多種技術實現路徑,其中視
2026電子皮膚賦能具身智能機器人專題論壇即將召開,共同探索觸覺感知新未來
、空間分辨率及多功能集成方面取得了顯著突破。電子皮膚通過模仿生物皮膚的多模態感知能力,賦予機器人觸覺、溫感乃至痛覺,是機器人邁向真正‘智能’的關鍵一步。 “第二屆機器人靈巧手國際創新大會”將于2026年3月19-20日在上
以觸覺為橋,定義智能體驗——PPS觸覺傳感技術賦能多領域創新
以觸覺為橋,定義智能體驗 ——PPS 觸覺傳感技術賦能多領域創新
二十多年來,PPS 始終專注于觸覺測量技術的突破與演進,將無形的 “

時識科技類腦視觸覺方案破解機器人靈巧操作難題
當前,機器人要實現如人類般靈巧的操作,其觸覺感知系統正面臨三大核心瓶頸:功耗高導致續航受限,數據量大引發延遲響應,以及系統復雜制約集成部署。這些因素共同限制了機器人在精細操作、人機安全交互等場景下的應用
【道生物聯TKB-623評估板試用】+遠距離觸覺馬達控制
系列LMR/線性磁力驅動馬達,及其他觸覺馬達。
在使用串口控制的情況下,在發送相應的控制指令后,會感知到觸覺馬達的振動。在使用藍牙通信的情況下,甚至可以用它來播放音樂!
圖2 指令控制
發表于 11-08 12:10
利用壓電元件實現觸覺反饋
作者:Jeff Smoot 是 Same Sky 應用工程和運動控制部門副總裁 觸覺 (haptic) 一詞源于希臘語,意思是“抓住”或“感知”,在工程學中指利用觸覺的技術。在電子系統
NVIDIA Isaac Sim仿真平臺助力他山科技實現觸覺傳感技術突破
傳感器仿真模型。該模型支持從虛擬環境構建到物理觸覺渲染的端到端流程,滿足云端大規模仿真訓練需求的同時,補充邊緣設備的實時交互場景,提升了觸覺
最新分析:觸覺傳感器技術演化,電子皮膚市場空間將達155億元
近日,東北證券發布研報稱,隨著人形機器人產業化加速,觸覺傳感器作為核心零部件迎來技術升級與市場擴容。伴隨技術走向成熟以及成本下降,該行預計靈巧手電子皮膚觸點有望
南京工業大學:仿生觸覺傳感系統讓機器人擁有“人類指尖”般的細膩感知
? 想象一下,未來的機器人不僅能靈活抓取物體,還能像人類一樣感知絲綢的順滑、砂紙的粗糙,甚至區分不同面料的細微紋理。這一切的關鍵在于“觸覺”。近日,南京工業大學黃維院士、孫庚志教授,安徽工程大學鄭賢
價值量占人形機器人超30%,十大國產靈巧手方案匯總
話語權,盈利能力或處于領先水平。此外,為提升靈巧手的功能性,絲杠、減速器、電機、腱繩、觸覺傳感器等關鍵零部件的應用需求也將隨之增加。 ? 在人工智能與智能制造深度融合的當下,人形機器人正從實驗室概念加速邁向規模化應用階段
NVIDIA技術驅動帕西尼觸覺感知與人形機器人智能突破
感知科技實現了從接觸仿真、觸覺信號產生、仿真數據生成,再到觸覺模態模型訓練的全流程 GPU 加速,提升標定和訓練效率 100 倍,完成觸覺傳
太陽誘電觸覺技術和音響用壓電振動片
今天為您介紹觸覺技術和音響用壓電振動片。
對壓電體施加應力,就會產生成比例的電極化,由此產生電壓,這叫做壓電效應。反之,對壓電體施加電壓,就會產生與電壓成比例的位移,這叫做逆壓電效應。振動片利用逆壓
發表于 04-09 15:56



 工商網監
工商網監
評論