 空心杯電機,為何成為人形機器人靈巧手的 “香餑餑”?
空心杯電機,為何成為人形機器人靈巧手的 “香餑餑”?

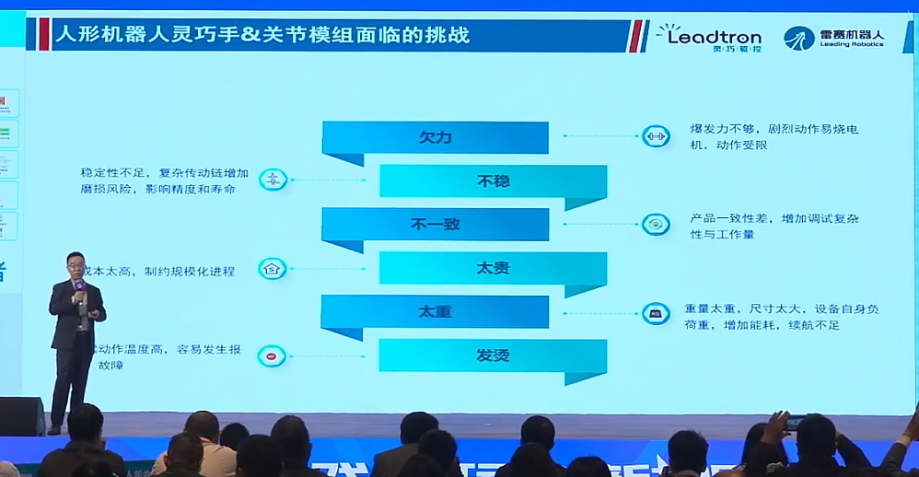
人形機器人的靈巧手,堪稱機器人與外界交互的 “魔法之手”,承擔著各類復雜而精細的操作任務。從精準抓取微小物件,到靈活完成復雜裝配工作,靈巧手的出色表現離不開其內部核心驅動部件—電機的強力支持。在眾多電機類型中,空心杯電機脫穎而出,成為當下人形機器人靈巧手的主流之選。這背后蘊含著怎樣的奧秘呢?
空心杯電機契合靈巧手需求的卓越特性
1. 輕巧靈動,適配狹小空間
人形機器人的手指空間極為有限,對內部零部件的尺寸和重量要求近乎苛刻。空心杯電機其重量可減輕 30%-50%,體積也相應大幅縮減 ,功率密度顯著提升。這種輕量化、小尺寸的特性,使其能夠輕松適配靈巧手內部狹小的安裝空間,為實現多關節、高自由度的設計奠定了堅實基礎。
2. 高效節能,續航保障有力
在實際應用中,機器人需要長時間持續工作,電機的節能性能至關重要。空心杯電機能量轉換效率高達 80%-90%,遠高于傳統鐵芯電機70% 左右的轉換效率。
這意味著在完成相同任務時,空心杯電機消耗的電量更少,能夠有效延長機器人的續航時間,減少充電頻次,提高工作效率。以醫療護理機器人為例,其靈巧手頻繁執行各種精細操作,高效節能的空心杯電機可確保機器人在長時間工作中保持穩定運行,無需頻繁中斷工作進行充電,為醫護人員提供更持續、可靠的協助 。
3. 迅猛響應,動作行云流水
靈巧手在執行任務時,需要對各種指令做出快速、精準的響應,以實現流暢、自然的動作。在高速運轉狀態下,其轉速調節極為靈敏,能夠快速跟蹤控制信號的變化。當機器人靈巧手抓取一個正在掉落的物體時,空心杯電機能夠在極短時間內做出響應,調整手指的位置和力度,準確無誤地完成抓取動作,避免物體掉落 。
4. 運行平穩,操作精準入微
在進行精細操作時,電機的平穩運行和低轉矩波動是確保操作精度的關鍵。空心杯電機在低速運行時也能保持出色的平穩性,振動和噪音極低 。電機產生的轉矩均勻分布,能夠精準控制轉子的位置和轉動角度,實現高精度的運動控制。在進行精密裝配工作時,機器人靈巧手需要將微小零件準確放置在特定位置,空心杯電機的平穩運行和精準控制能力,可確保零件放置位置的偏差控制在極小范圍內,大大提高裝配質量和成功率 。
華磁自粘結鐵芯在靈巧手空心杯電機上的核心優勢集中在更高功率密度、更低損耗與溫升、更小振動噪聲、更優一致性與可制造性,契合靈巧手對輕量、快速響應、平滑力矩與安靜運行的嚴苛要求。
華磁自粘結鐵芯與空心杯電機特性的協同
低慣量與快速響應:自粘結鐵芯進一步降低鐵損與機械損耗,使啟停與軌跡跟蹤更快更穩。
平滑力矩輸出:無齒槽 +自粘結鐵芯的低振動設計,助力力矩波動≤5%的實現。
安靜運行與人機安全:NVH 顯著改善,適合家庭 / 服務場景。
小型化與集成:疊裝系數高、磁橋小,便于在狹小指節內集成多軸驅動。

應用與選型要點
工藝選擇:與焊接 / 鉚接相比,華磁自粘結更適合超薄硅鋼片,能避免局部導通與疊壓難題,在高頻 / 高速下鐵損與勵磁電流更低。
設計權衡:關注磁橋尺寸、疊裝系數與固化工藝對強度、損耗與溫升的耦合影響,結合目標轉矩、溫升與噪聲指標進行優化。
結論:在靈巧手空心杯電機中采用華磁自粘結鐵芯,可同時提升功率密度、效率、溫升與 NVH,且利于小型化與批量制造,是當前人形機器人靈巧手電機的優選方案。
-
機器人
+關注
關注
213文章
31310瀏覽量
223342 -
驅動
+關注
關注
12文章
1986瀏覽量
88656 -
電機
+關注
關注
144文章
9676瀏覽量
154614
發布評論請先 登錄
機器人靈巧手新型電驅動技術:諧波磁場電機與新材料的融合革命

靈巧手驅動技術深度報告:空心杯電機黃金賽道,高壁壘與高增長并存

靈巧手觸覺感知技術深度報告:從“單點感知”到“觸覺成像”

人形機器人“靈巧手”,正在接近27個自由度的人手

從概念到落地:靈巧手為何是人形機器人產業化的決勝環節?
人形機器人驅動電機精準測試—空心杯電機及無框力矩電機測試解決方案

人形機器人市場火爆!雷賽智能重磅推出“20自由度”靈巧手方案
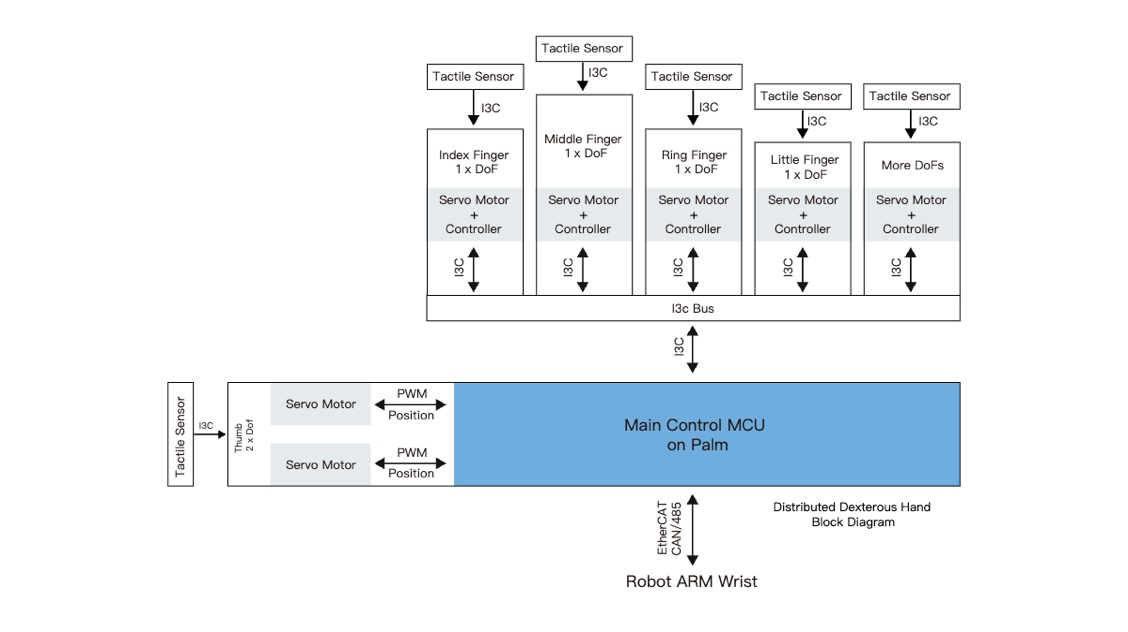
基于I3C分布式總線架構的人形機器人靈巧手方案
年均增長64.6%,機器人靈巧手賽道高燃爆發

我國發布全球首款輕量化重載機器人仿生靈巧手




 工商網監
工商網監
評論