 柔性觸覺傳感器的主要技術路線
柔性觸覺傳感器的主要技術路線

觸覺傳感陣列是由多個觸覺傳感單元構成的觸覺傳感器。觸覺傳感單元能測量單點的接觸力,而觸覺傳感陣列由于集成了多個傳感單元,因此具備分布式接觸力的檢測能力。目前,觸覺傳感的實現方法有多種,按其原理可分為壓阻式、壓電式、電容式、流體式、光學式、晶體管式等。
1.壓阻式觸覺傳感
壓阻材料在受到外界壓力時其自身電阻值會發生變化,通過檢測電阻值的變化可對外界施加的壓力進行測量,因此將壓阻材料作為觸覺傳感器的壓力敏感材料可實現觸覺力的檢測。
常見壓阻材料的制備可通過在絕緣的高分子聚合物中混合導電物質,形成具有壓力敏感特性的復合材料。導電顆粒、導電納米線等導電材料分布在絕緣的聚合物基體中,受壓時導電材料間的距離變小,導電通路增多,從而使整體電阻變小。
2012年,美國斯坦福大學Tee等將具有納米微結構的鎳顆粒與超分子聚合物混合,制備出高靈敏的壓阻材料,并用于柔性電子皮膚的設計,研制的柔性電子皮膚表現出良好的接觸力檢測性能。
2014年,美國加利福尼亞大學Takei等在聚合物絕緣基體內加入了導電CNT(碳納米管)和AgNP(納米銀顆粒),作為觸覺傳感陣列的敏感材料,如圖1所示,當傳感陣列受到拉伸、壓縮以及彎曲時,其電阻值均會發生明顯變化。
除了導電聚合物外,具有壓阻效應的金屬薄膜也被用在觸覺傳感陣列的設計制造中。
2008年,韓國高麗大學Kim等設計了PI(聚酰亞胺)基底的觸覺傳感陣列,PI基底上制造有鎳鉻合金,受力變形時其電阻發生變化,從而實現觸覺力的測量。
2016年,韓國延世大學Park等使用 MoS2和石墨烯電極制造的觸覺傳感陣列具有較高的檢測靈敏度,且測試重復性優良。利用具有壓阻效應的金屬薄膜作為觸覺傳感陣列的壓力敏感材料,使得傳感陣列具有動態性能好和響應速度快的特點。
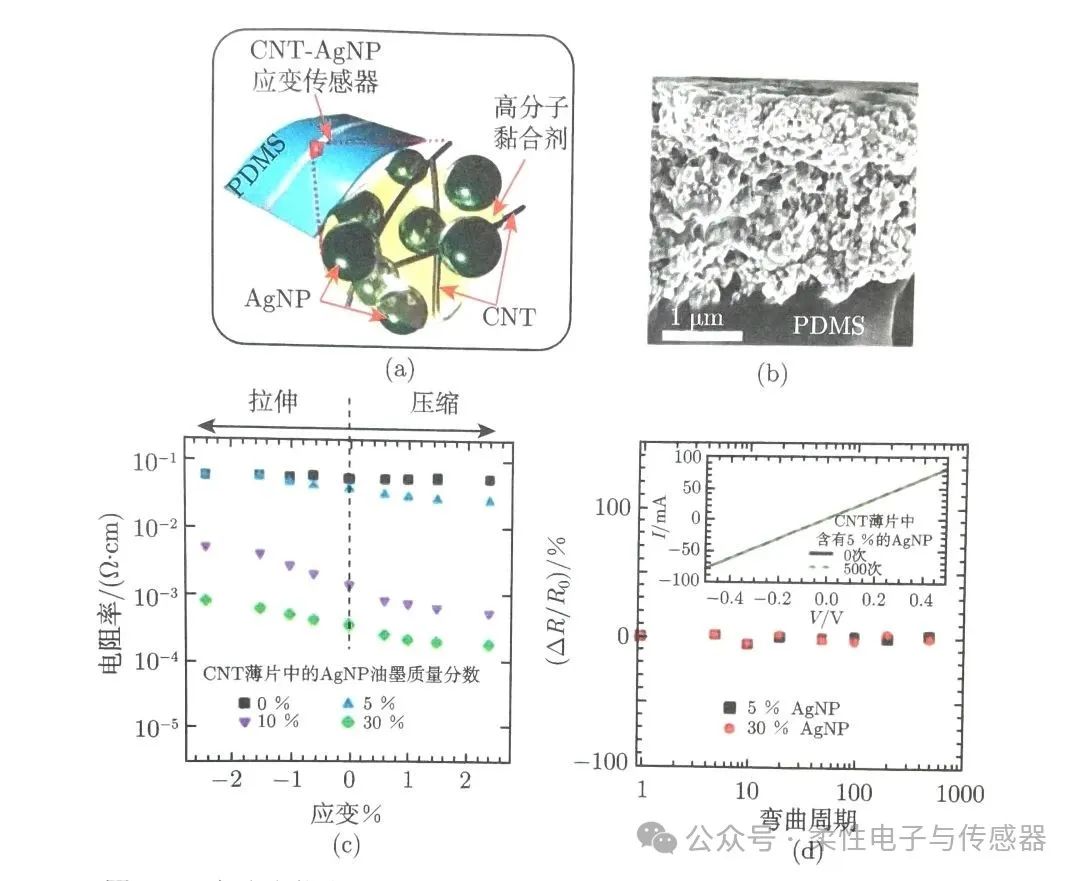
圖1 在聚合物中加入碳納米管和納米銀顆粒制造成的導電聚合物
2.壓電式觸覺傳感
壓電材料在受到外界壓力時會產生電荷,通過測量產生電荷量的多少,即可對施加的外力進行檢測。PVDF(聚偏氟乙烯)經過極化處理后具有壓電特性,可用作觸覺傳感器的壓力敏感材料。
2006年,日本大阪大學Hosoda等將PVDF膜隨機分布在仿人手指中,手指與物體的接觸使PVDF薄膜產生電荷,將電荷信號轉化為電壓即可實現手指與物體間接觸力的測量。
2016年,中山大學Li等設計了平面型的壓電薄膜作為觸覺傳感單元的力敏感層,如圖2所示,受力時壓電薄膜的上下表面產生電荷,通過晶體管對產生的電荷和電壓進行放大,從而實現觸覺力的測量。
2016年,浙江大學俞平等在觸覺傳感陣列的每個傳感單元中集成了四個PVDF 薄膜,當三維力施加在傳感單元上時,四個 PVDF 薄膜產生不同的電荷量測量電荷的差異即可解耦計算得到觸覺傳感單元所受到的三維力。
對于壓電式觸覺傳感,壓電材料產生的電荷量會隨著時間的推移變少,故壓電式觸覺傳感器的靜態檢測性能較差,但適用于動態力的檢測。
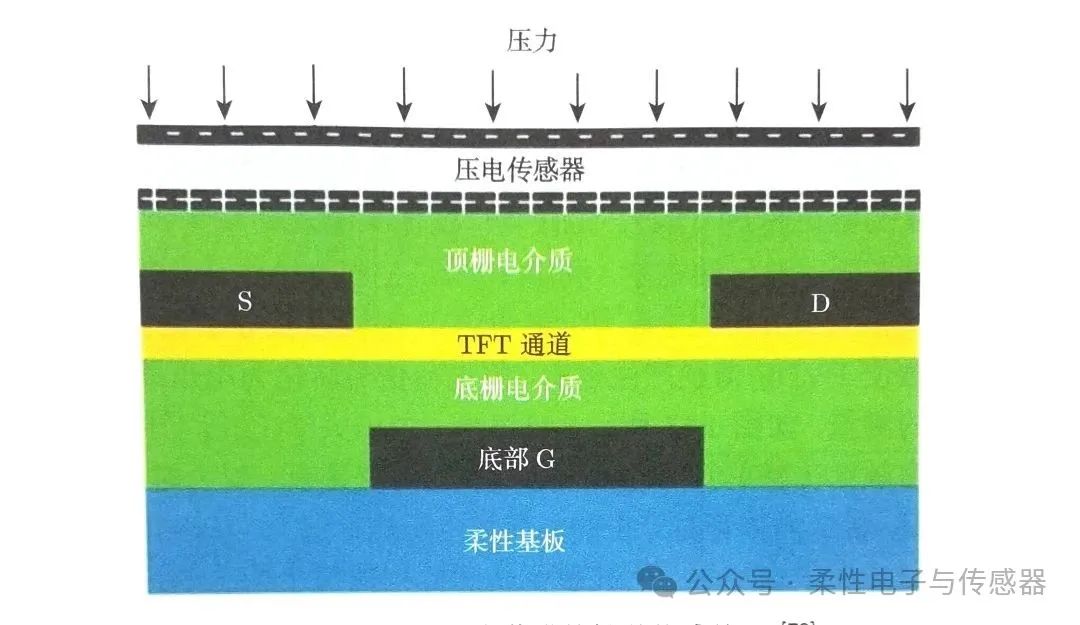
圖2 基于壓電薄膜的觸覺傳感單元
3.電容式觸覺傳感
電容通常包含上下兩個電容極板和中間介電層。在外力作用下,介電層受到壓縮,使上下電容極板間的距離發生變化,從而產生電容值的變化。
采用平板電極作為電容極板的電容式觸覺傳感陣列具有結構簡單的特點,容易實現法向觸覺力的測量。
2008年,美國田納西大學Pritchard等在兩個平板電極間設計了一層聚對二甲苯薄層作為介電層,制作成10x10的觸覺傳感陣列,壓力作用下聚對二甲苯被壓縮,電容值增大,以此來檢測觸覺力的大小。
香港城市大學 Zhang 等設計了一種基于 PDMS 介電層的電容式觸覺傳感單元,并制作了3x3的傳感陣列,如圖1.14所示。電容極板的多種觸覺傳感單元結構,獲得了良好的三維力檢測性能。
2012年,日本國家先進工業科學技術研究所Takamatsu 等利用表面覆蓋有導電油墨的尼龍纖維編織成網狀織物,在網狀節點處形成電容,以檢測分布式的觸覺力。電容式觸覺傳感器容易獲得較高的接觸力檢測靈敏度,且制造簡單。
意大利技術研究院的 Viry 等以銅/錫涂層織物為導電板,以氟硅片為介電層制成柔性三維力傳感器,并被嵌在PDMS封裝層內,其結構示意及實物照片如圖3所示。研究人員以底部四極板的平均電容變化量反映法向力的增減,以相鄰極板間電容變化量之差來計算切向力的大小。因氟硅片的低附著性,上下極板間將自然產生約150μm厚的空氣薄層;而導電織物的經紗和緯紗之間亦存在一定空隙,故傳感器對微小載荷的檢測非常靈敏:當外力小于32mN時,其靈敏度可達14.22 N-1。受讀取系統的限制,柔性三維力傳感器的測力上限為12N。
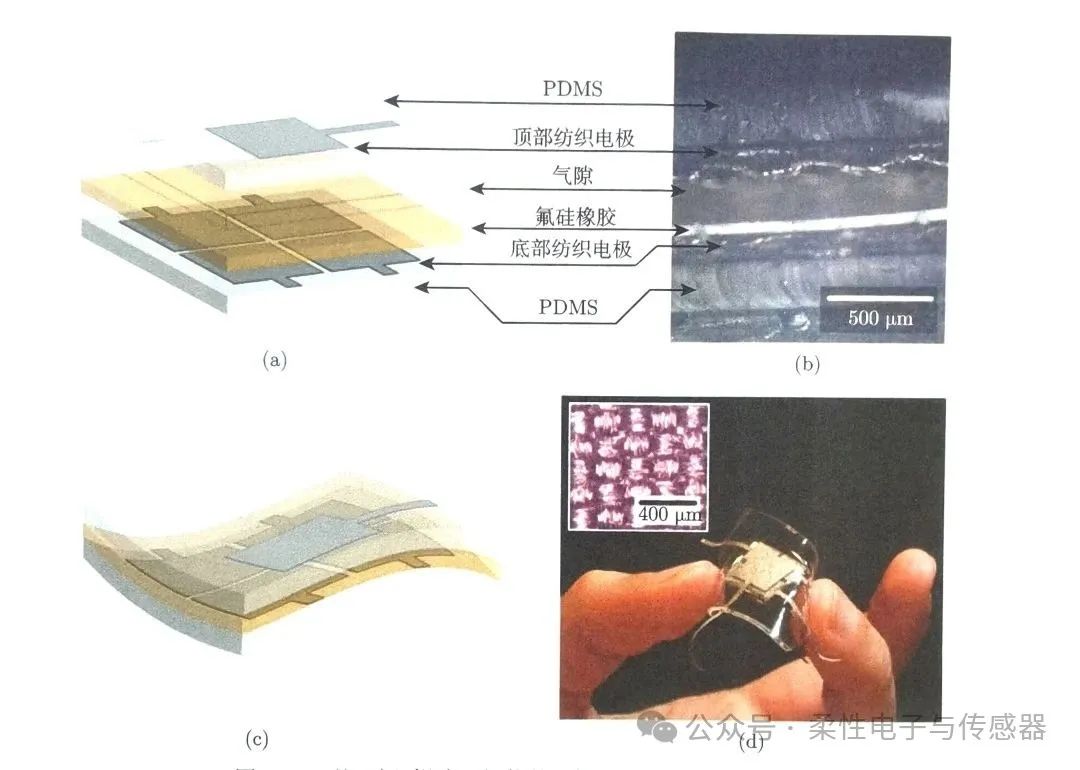
圖3 基于銅/錫涂層織物的柔性電容式三維力傳感器
4.流體式觸覺傳感
流體式觸覺傳感可采用導電流體和非導電流體。研究者們在觸覺傳感陣列中設計了直線型、圓形、螺旋線型等形狀的微流道并填充注入導電流體,微流道在外力作用下被擠壓變形,其長度和橫截面積發生改變,導致微流道內流體的電阻產生變化,從而實現觸覺力的檢測。
2013年,美國南加利福尼亞大學Roy等將導電流體填入機械指頭,在外力作用下指尖內的導電流體被壓縮,其電阻值發生變化,通過測量電阻值的變化即可實現對外力的檢測,如圖4所示。
2015年,美國卡內基梅隆大學Chossat等在觸覺傳感陣列內設計了網狀的微流道并填充導電流體,在網格的邊緣引出電極,利用阻抗成像技術對網狀微流道的受力進行解耦,成功檢測出接觸力的分布情況。
在非導電流體的應用方面,2012年,日本慶應義塾大學Ahmad Ridzuan等將絕緣流體填充到觸覺傳感陣列每個傳感單元的介電層中。當觸覺傳感陣列受力時,介電層被壓縮,電容值發生變化。由于介電層為流體填充,傳感陣列具有較高的柔性。采用流體作為觸覺傳感陣列的壓力敏感元件,制造的傳感陣列雖具有較高的柔性,但存在流體泄露的風險。
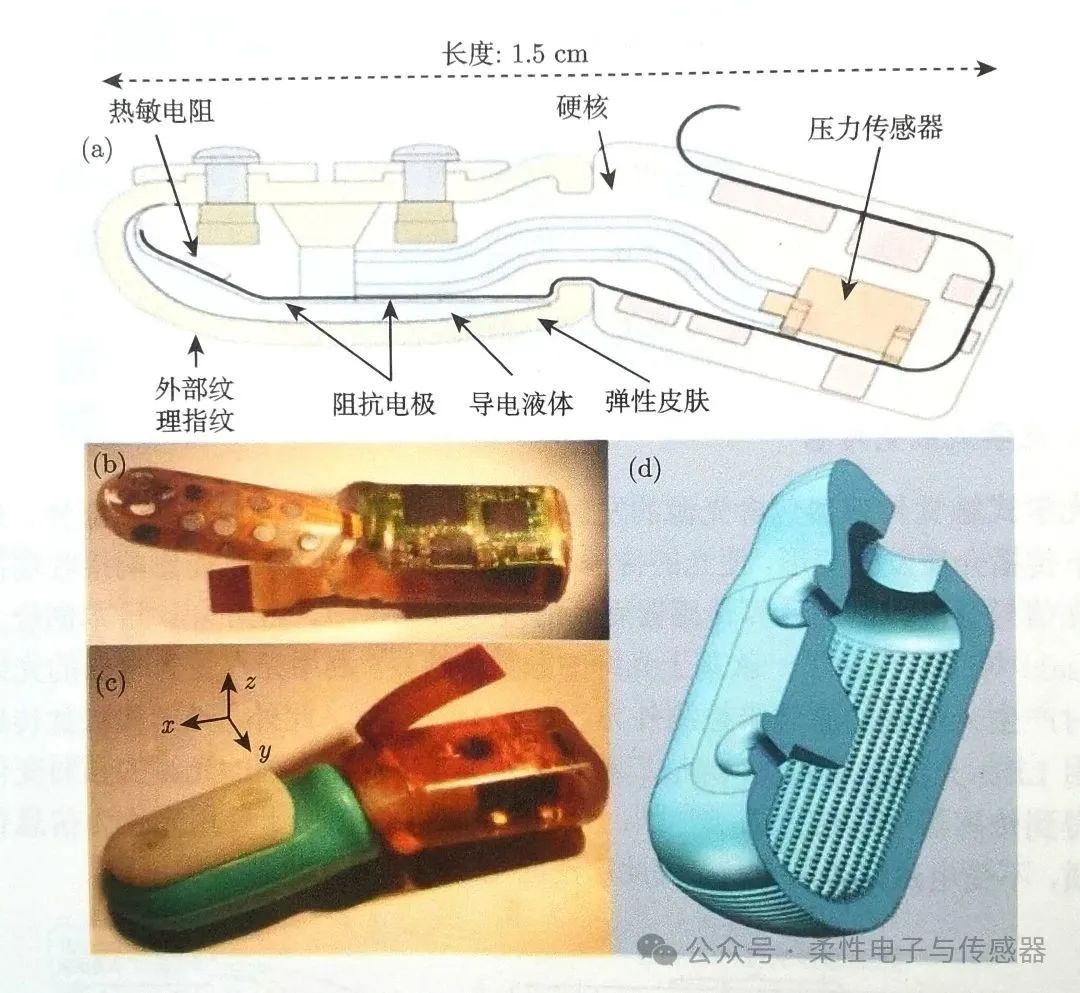
圖4 集成了流體式觸覺傳感器的機械指頭
5.光學式觸覺傳感
光學式觸覺傳感器包含光源的發射端、接收端和光的傳播介質三部分。外力作用下傳播介質發生變形,使光的傳播方向和強度發生變化,從而影響接收端接收到的光信號強度,以此計算傳感器受到的接觸力。
2016年,日本創價大學Yamazaki 等設計了一款基于光纖的觸覺傳感器,利用光在受力彎曲的光纖中傳播時產生光泄漏的原理來檢測外力,如圖5所示。
此外,光學式觸覺傳感器常使用 LED光源發送光線,光敏二極管接收光線,從接收到的光線的強弱變化可計算得到傳感器受到的外力。光學式觸覺傳感器由于使用光作為信息傳遞的介質,不受電磁信號的干擾,因此廣泛應用于外科手術機器人領域。
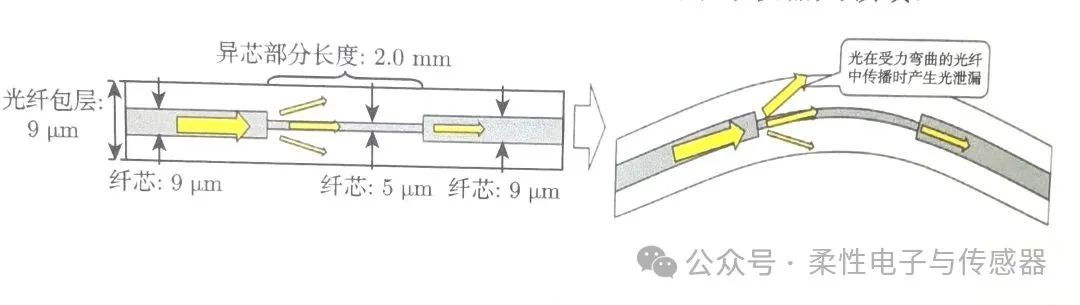
圖5 基于光纖的觸覺傳感器的工作原理
6.晶體管式觸覺傳感
晶體管在觸覺傳感器中的作用是對觸覺敏感元件的電信號進行放大,增強傳感器的信噪比。有機場效應晶體管得益于其高柔性的特點,能很好地與柔性觸覺傳感器進行集成,因此被諸多研究者所采用。
2016年,意大利卡利亞里大學 Spanu 等在觸覺傳感單元的壓電薄膜敏感元件上制造了有機場效應晶體管,對壓電薄膜的電荷信號進行放大與測量,實現觸覺力的檢測,如圖 6所示。
2010年,美國加利福尼亞大學伯克利分校Kuniharu Takei等在納米線有機場效應晶體管陣列上覆蓋導電橡膠層,制作出有源觸覺傳感陣列,利用有源晶體管的信號放大作用來提高觸覺傳感陣列的檢測靈敏度,如圖7所示。
集成了晶體管的觸覺傳感陣列,把部分信號處理電路直接設計在觸覺傳感陣列上,使其具有更高的“智能”,并可顯著減小外圍電路的復雜程度,但缺點是傳感器結構復雜制造工藝煩瑣、成本昂貴。
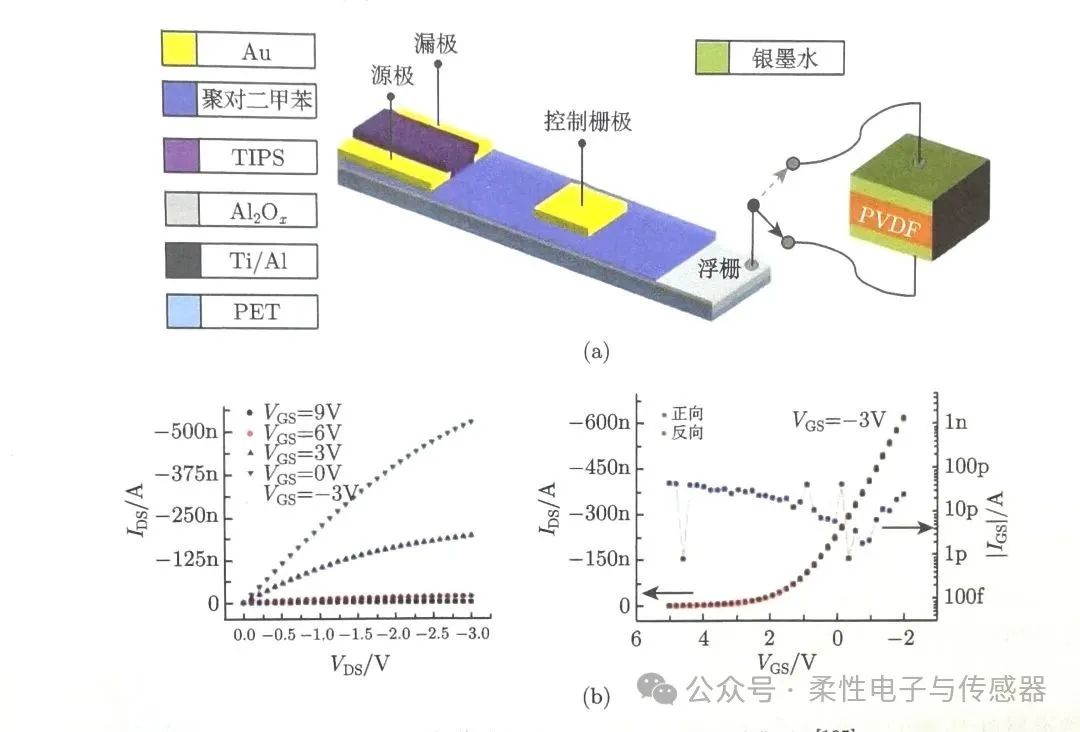
圖6 壓電薄膜與有機場效應晶體管的集成
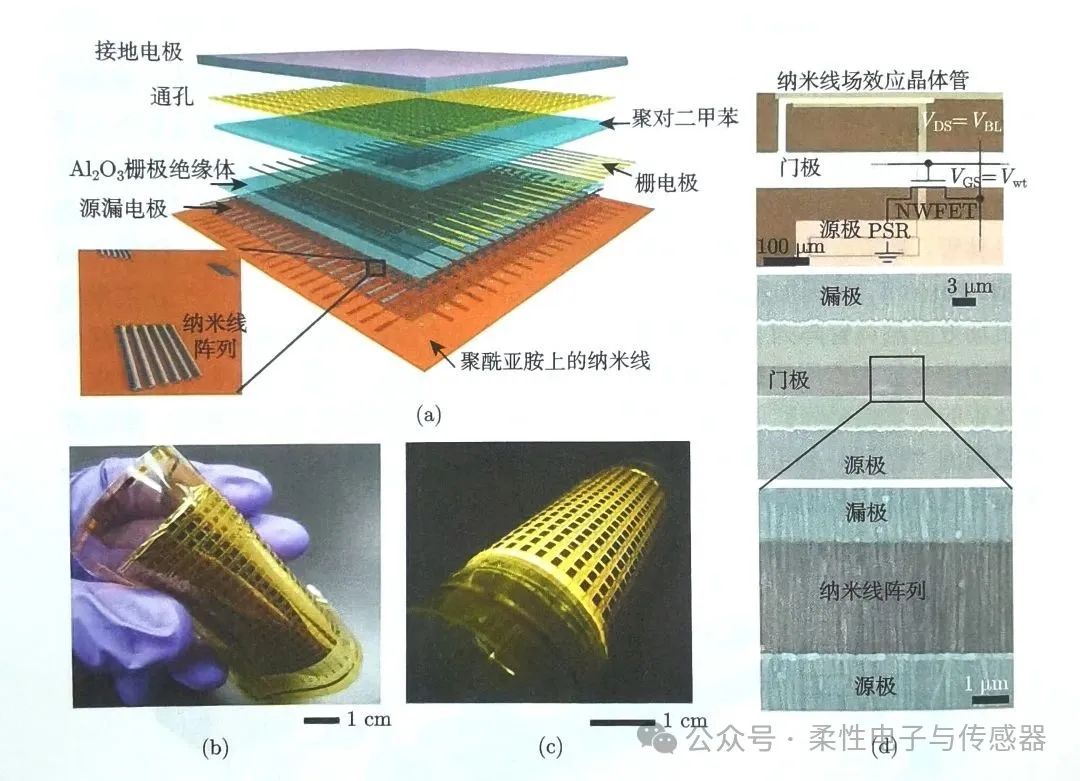
圖7 導電橡膠與有機場效應晶體管的集成
7.其他類型觸覺傳感
除了上述幾種觸覺傳感方式外,還有基于鐵電效應、聲波、電場、磁場等的觸覺傳感方式。
美國康奈爾大學的Zhao 等以透明的聚氨酯橡膠為核心,以具有高吸光性的聚硅氧烷復合材料為覆蓋層制作了高彈性的波導管。根據光功率在波導管內與傳播距離呈負相關關系的原理,研究人員在波導管兩端分別安置了發光二極管和光敏二極管以使其具有反應拉伸應變、彎曲曲率以及外界載荷的能力。在測力實驗中,研究人員發現,當力的作用面積小于6mm2時,波導管傳感器將同時具有較高的線性度與靈敏度。之后,Zhao等將三條波導管整合入一根中空的硅橡膠指型執行器中,并以此為基礎制得了智能假肢手。后續實驗證明該假肢手可對物體的外形、材質、硬度進行識別。
韓國成均館大學的 Ho 等利用石墨烯及其衍生物研制了多模式的柔性透明電子皮膚。該電子皮膚共有6x6個傳感單元組,每個單元組包含一個基于氧化石墨烯的阻抗式濕度傳感器、一個以PDMS為介電層的石墨烯電容式壓力傳感器和一個基于還原氧化石墨烯的電阻式溫度傳感器。在將壓力傳感器的表征方式設為電容的變化量后,三類傳感器的輸出將互不影響。后續的熱風吹拂、單/雙指按壓、呼氣等實驗證明了該電子皮膚具有同時檢測溫度、濕度、壓力等物理量的能力。
注:以上內容主要來自:
《分布式柔性觸覺傳感陣列—設計、建模與檢測應用》 汪延成 梅德慶 著
來源:柔性電子與傳感器
審核編輯 黃宇
-
觸覺傳感器
+關注
關注
4文章
120瀏覽量
10379
發布評論請先 登錄
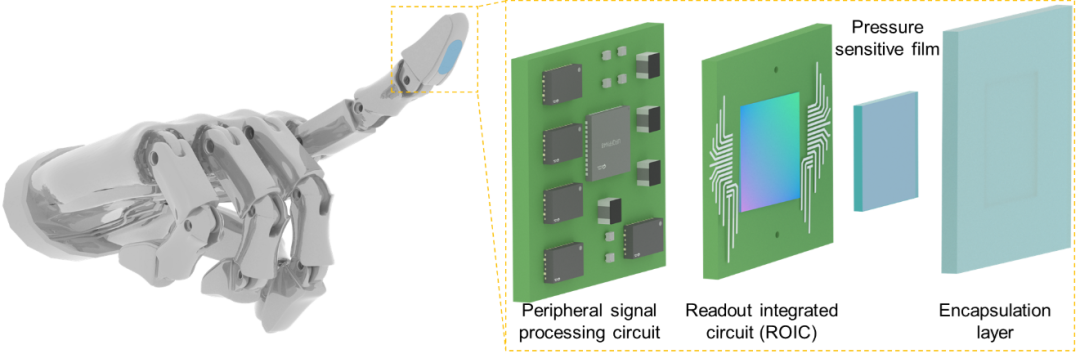
“電子皮膚”,人形機器人的柔性觸覺傳感器
西湖大學:研發CMOS兼容壓力傳感器陣列,實現精準觸覺感知功能
以觸覺為橋,定義智能體驗——PPS觸覺傳感技術賦能多領域創新

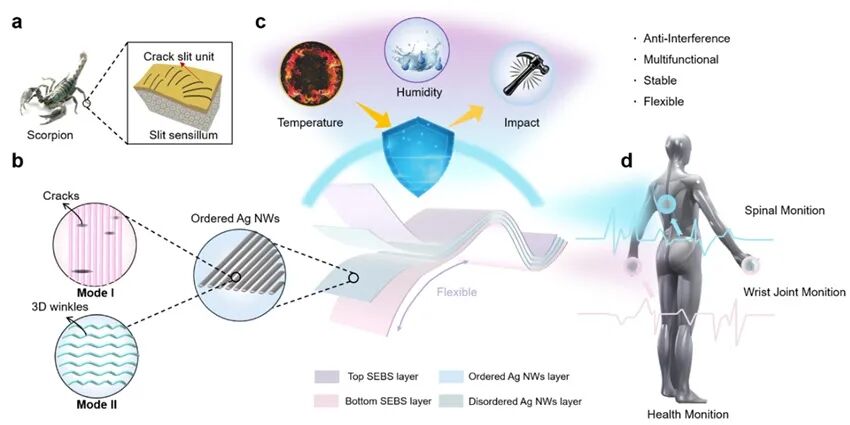
中國科學技術大學:研究有序納米線結構用于抗干擾雙模態柔性觸覺傳感器
進入多模態時代!測量采樣頻率升至1000Hz,三大機器人觸覺傳感器新品發布
NVIDIA Isaac Sim仿真平臺助力他山科技實現觸覺傳感技術突破
最新分析:觸覺傳感器技術演化,電子皮膚市場空間將達155億元
A股國產力傳感器龍頭柯力傳感投資北京一家觸覺傳感器公司“他山科技”
觸覺傳感器已在亞馬遜倉儲機械臂率先商用 新增形式有望加速市場增長節奏

蘇州靈動佳芯科技這家觸覺傳感器公司拿下億元融資

漢威科技柔性觸覺傳感器撬動智慧康養無限可能
仿生觸覺傳感器:觸碰未來的科技奇跡
廣西大學:用于高溫應用中的壓力和溫度傳感的摩擦電觸覺傳感器
漢威科技柔性觸覺傳感器:為人形機器人裝上“中國觸覺”




 工商網監
工商網監
評論