") 廣西大學(xué):用于高溫應(yīng)用中的壓力和溫度傳感的摩擦電觸覺(jué)傳感器
廣西大學(xué):用于高溫應(yīng)用中的壓力和溫度傳感的摩擦電觸覺(jué)傳感器

具有同時(shí)檢測(cè)多種刺激能力的類皮膚傳感器在前沿人機(jī)交互中具有巨大的潛力。然而,實(shí)現(xiàn)超越人類觸覺(jué)感知的多模態(tài)觸覺(jué)識(shí)別仍面臨重大挑戰(zhàn)。在此,來(lái)自廣西大學(xué)的聶雙喜研究團(tuán)隊(duì)于國(guó)際著名學(xué)術(shù)期刊Nature Communications(IF=14.7)合作發(fā)表了論文Triboelectric tactile sensor for pressure and temperature sensing in high-temperature applications。該團(tuán)隊(duì)開(kāi)發(fā)了一種適應(yīng)極端環(huán)境的多模態(tài)摩擦電傳感器,能夠檢測(cè)超出人類感知范圍的壓力/溫度。該傳感器基于摩擦電納米發(fā)電機(jī)技術(shù),設(shè)計(jì)了一個(gè)不對(duì)稱結(jié)構(gòu),能夠獨(dú)立輸出雙信號(hào),以提高感知靈敏度。通過(guò)將信號(hào)和刺激轉(zhuǎn)換為特征矩陣,實(shí)現(xiàn)了對(duì)復(fù)雜物體(識(shí)別率為94%)和高溫下溫度的并行感知。所提出的多模態(tài)摩擦電觸覺(jué)傳感器在最大檢測(cè)范圍和快速響應(yīng)方面取得了進(jìn)展,實(shí)現(xiàn)了人類皮膚高溫感知的上限(60°C),其工作溫度為200°C。該自供電多模態(tài)感知系統(tǒng)為人機(jī)/機(jī)器人/環(huán)境交互應(yīng)用提供了更廣泛的可能性。
圖 文 導(dǎo) 讀
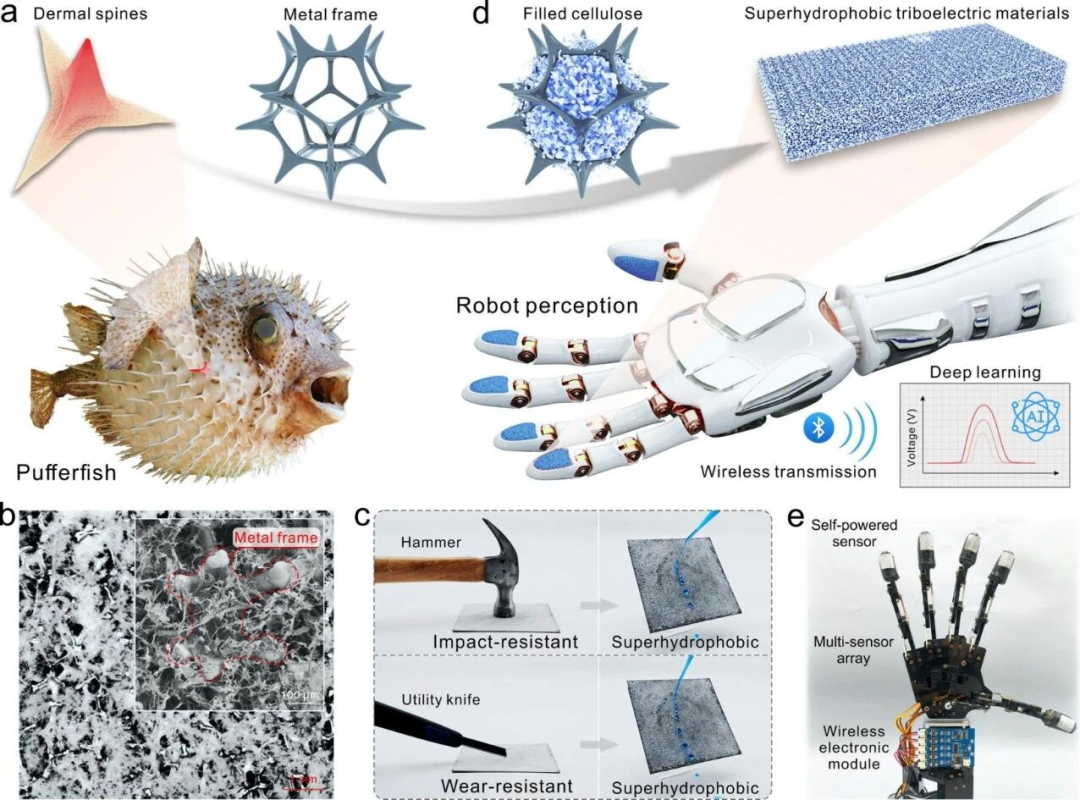
在此研究中,研究團(tuán)隊(duì)受到撒哈拉銀螞蟻(Cataglyphis bombycina)的啟發(fā),這些昆蟲能夠在高溫環(huán)境中保持多感官感知,他們開(kāi)發(fā)了一種摩擦電傳感器,使其能夠在極高溫度下自適應(yīng)觸覺(jué)感知,超越人類觸覺(jué)的極限(圖1a,b)。研究表明,當(dāng)生物體受到機(jī)械和熱刺激時(shí),離子通道的開(kāi)關(guān)會(huì)產(chǎn)生生理電信號(hào),從而促進(jìn)環(huán)境感知。此外,摩擦電信號(hào)與機(jī)器學(xué)習(xí)算法相結(jié)合,實(shí)現(xiàn)了物體識(shí)別。由于不對(duì)稱結(jié)構(gòu)和耐熱感應(yīng)材料的設(shè)計(jì),該摩擦電傳感器表現(xiàn)出快速的應(yīng)力響應(yīng)和恢復(fù)時(shí)間,分別為70 ms和58 ms。其最大工作溫度可達(dá)200°C,遠(yuǎn)遠(yuǎn)超出了人類皮膚的高溫感知極限(60 ℃)。此外,通過(guò)將摩擦電傳感器集成到機(jī)器人手上,實(shí)現(xiàn)了在高溫下對(duì)壓力和溫度的實(shí)時(shí)響應(yīng)。本研究不僅解決了長(zhǎng)期以來(lái)利用摩擦電實(shí)現(xiàn)高溫下精準(zhǔn)壓力和溫度感知的挑戰(zhàn),還推動(dòng)了極端環(huán)境下高效智能系統(tǒng)的發(fā)展。 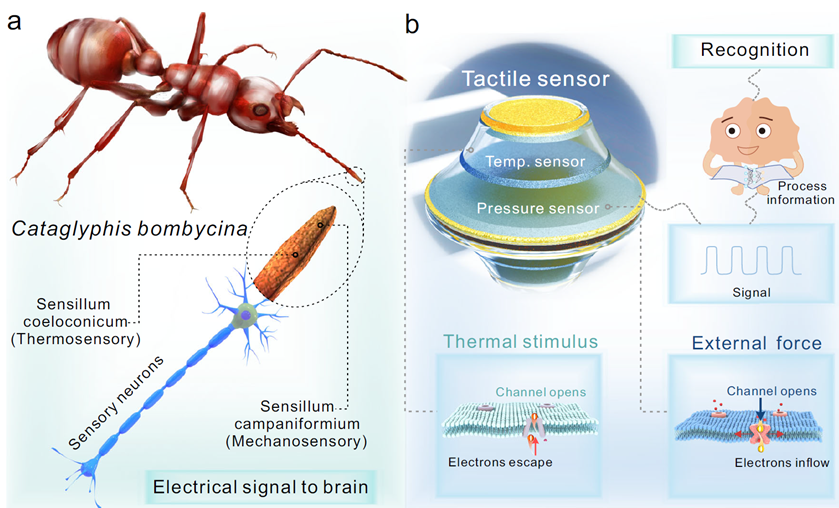 圖1 仿生摩擦電傳感器的原理圖 ? ? ? 人類皮膚通過(guò)機(jī)械受體和溫度受體區(qū)分機(jī)械和熱刺激,實(shí)現(xiàn)觸覺(jué)和溫度刺激的時(shí)空識(shí)別,以確保在復(fù)雜環(huán)境中實(shí)現(xiàn)安全有效的人機(jī)交互(圖2a)。為了模擬自然觸覺(jué),理解和利用影響生物皮膚感知特性的關(guān)鍵因素至關(guān)重要。受到高溫銀螞蟻以及皮膚機(jī)械受體和溫度受體及其感知機(jī)制的啟發(fā),利用外部刺激下的電荷轉(zhuǎn)移生成電信號(hào),設(shè)計(jì)了一種適應(yīng)極端環(huán)境的壓力/溫度響應(yīng)摩擦電傳感器。該觸覺(jué)傳感器由一個(gè)壓力感應(yīng)摩擦電納米發(fā)電機(jī)(P-TENG)和一個(gè)溫度感應(yīng)摩擦電納米發(fā)電機(jī)(T-TENG)組成(圖2b)。基于接觸電化學(xué)原理,該多模態(tài)傳感器通過(guò)利用T-TENG的穩(wěn)定接觸區(qū)域,避免了力的干擾。通過(guò)利用壓力和溫度響應(yīng)機(jī)制的耦合但低交叉靈敏度,它能夠明確區(qū)分觸覺(jué)和溫度電信號(hào),同時(shí)展示出高靈敏度和高溫抗性(圖2c),為在極端環(huán)境中響應(yīng)多種刺激提供了可能性。 ? ? 當(dāng)受到壓力和溫度刺激時(shí),傳感器中具有不對(duì)稱結(jié)構(gòu)的摩擦電材料相互接觸,導(dǎo)致電荷轉(zhuǎn)移并進(jìn)一步生成相應(yīng)的電信號(hào)(圖2d)。為了展示摩擦電觸覺(jué)傳感器在物體多模態(tài)感知和信息反饋中的應(yīng)用,五個(gè)微型傳感器通過(guò)激光打印的柔性和可拉伸電極組裝在機(jī)器人手上(圖2e),使得物體形狀和溫度識(shí)別變得靈活。
圖1 仿生摩擦電傳感器的原理圖 ? ? ? 人類皮膚通過(guò)機(jī)械受體和溫度受體區(qū)分機(jī)械和熱刺激,實(shí)現(xiàn)觸覺(jué)和溫度刺激的時(shí)空識(shí)別,以確保在復(fù)雜環(huán)境中實(shí)現(xiàn)安全有效的人機(jī)交互(圖2a)。為了模擬自然觸覺(jué),理解和利用影響生物皮膚感知特性的關(guān)鍵因素至關(guān)重要。受到高溫銀螞蟻以及皮膚機(jī)械受體和溫度受體及其感知機(jī)制的啟發(fā),利用外部刺激下的電荷轉(zhuǎn)移生成電信號(hào),設(shè)計(jì)了一種適應(yīng)極端環(huán)境的壓力/溫度響應(yīng)摩擦電傳感器。該觸覺(jué)傳感器由一個(gè)壓力感應(yīng)摩擦電納米發(fā)電機(jī)(P-TENG)和一個(gè)溫度感應(yīng)摩擦電納米發(fā)電機(jī)(T-TENG)組成(圖2b)。基于接觸電化學(xué)原理,該多模態(tài)傳感器通過(guò)利用T-TENG的穩(wěn)定接觸區(qū)域,避免了力的干擾。通過(guò)利用壓力和溫度響應(yīng)機(jī)制的耦合但低交叉靈敏度,它能夠明確區(qū)分觸覺(jué)和溫度電信號(hào),同時(shí)展示出高靈敏度和高溫抗性(圖2c),為在極端環(huán)境中響應(yīng)多種刺激提供了可能性。 ? ? 當(dāng)受到壓力和溫度刺激時(shí),傳感器中具有不對(duì)稱結(jié)構(gòu)的摩擦電材料相互接觸,導(dǎo)致電荷轉(zhuǎn)移并進(jìn)一步生成相應(yīng)的電信號(hào)(圖2d)。為了展示摩擦電觸覺(jué)傳感器在物體多模態(tài)感知和信息反饋中的應(yīng)用,五個(gè)微型傳感器通過(guò)激光打印的柔性和可拉伸電極組裝在機(jī)器人手上(圖2e),使得物體形狀和溫度識(shí)別變得靈活。 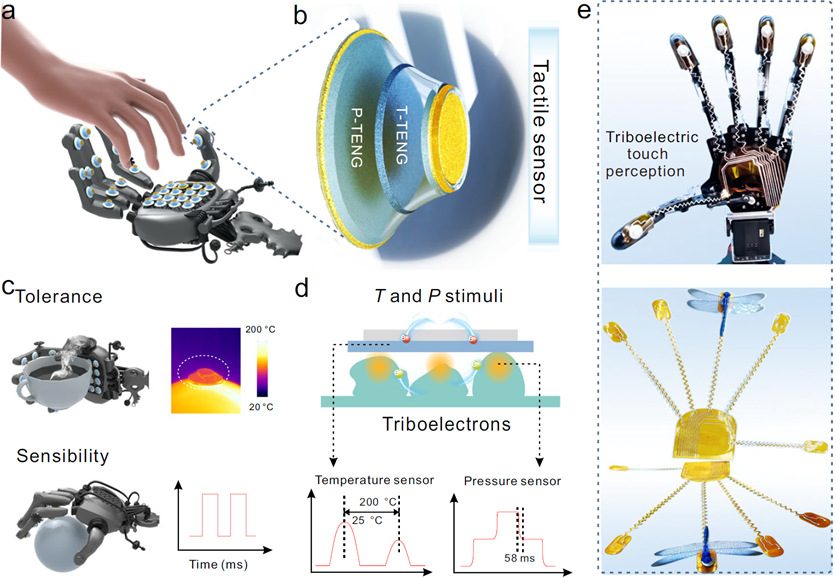 圖2 超越人類觸覺(jué)感知的極端環(huán)境適應(yīng)性壓力/溫度響應(yīng)摩擦電傳感器 ? ? ? 摩擦電傳感器的制備過(guò)程,如圖3a所示,能夠響應(yīng)極端環(huán)境中的壓力/溫度。采用兩步封裝策略設(shè)計(jì)了一個(gè)結(jié)構(gòu)不對(duì)稱的雙層傳感器。為了實(shí)現(xiàn)極端條件下的自適應(yīng)響應(yīng),本研究采用了柔性、耐高溫的硅膠作為外殼,以促進(jìn)對(duì)壓力刺激的快速響應(yīng)(圖3ai)。
圖2 超越人類觸覺(jué)感知的極端環(huán)境適應(yīng)性壓力/溫度響應(yīng)摩擦電傳感器 ? ? ? 摩擦電傳感器的制備過(guò)程,如圖3a所示,能夠響應(yīng)極端環(huán)境中的壓力/溫度。采用兩步封裝策略設(shè)計(jì)了一個(gè)結(jié)構(gòu)不對(duì)稱的雙層傳感器。為了實(shí)現(xiàn)極端條件下的自適應(yīng)響應(yīng),本研究采用了柔性、耐高溫的硅膠作為外殼,以促進(jìn)對(duì)壓力刺激的快速響應(yīng)(圖3ai)。 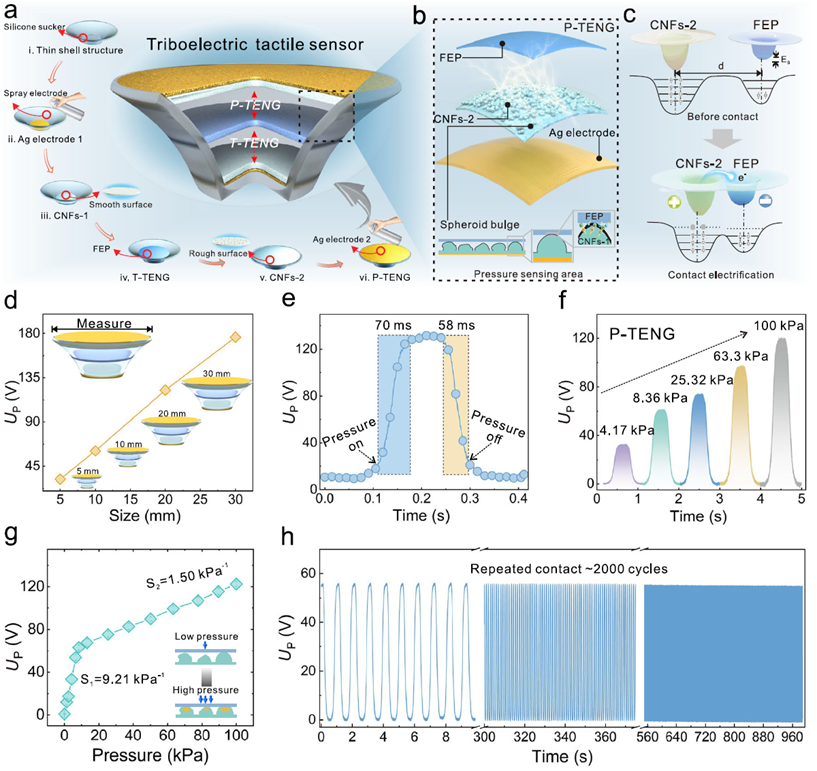 圖3壓力傳感 ? ? ? 溫度影響摩擦電信號(hào)的大小,因此開(kāi)發(fā)了T-TENG以響應(yīng)溫度刺激。圖4a展示了T-TENG的結(jié)構(gòu)和工作機(jī)制。在熱刺激下,摩擦電材料的溫度升高,導(dǎo)致存儲(chǔ)電荷的無(wú)序耗散。該現(xiàn)象通過(guò)高溫下的電子云模型進(jìn)一步解釋(圖4b)。當(dāng)兩種材料接觸時(shí),電子云重疊,初始的單一勢(shì)阱變?yōu)椴粚?duì)稱的雙勢(shì)阱,電子轉(zhuǎn)移生成摩擦電信號(hào)。在這種背景下,改進(jìn)的熱電子發(fā)射模型表明,T-TENG的輸出電壓隨著溫度的升高而降低,這有助于溫度感知,因?yàn)闇囟壬邔?dǎo)致摩擦電荷的發(fā)射。
圖3壓力傳感 ? ? ? 溫度影響摩擦電信號(hào)的大小,因此開(kāi)發(fā)了T-TENG以響應(yīng)溫度刺激。圖4a展示了T-TENG的結(jié)構(gòu)和工作機(jī)制。在熱刺激下,摩擦電材料的溫度升高,導(dǎo)致存儲(chǔ)電荷的無(wú)序耗散。該現(xiàn)象通過(guò)高溫下的電子云模型進(jìn)一步解釋(圖4b)。當(dāng)兩種材料接觸時(shí),電子云重疊,初始的單一勢(shì)阱變?yōu)椴粚?duì)稱的雙勢(shì)阱,電子轉(zhuǎn)移生成摩擦電信號(hào)。在這種背景下,改進(jìn)的熱電子發(fā)射模型表明,T-TENG的輸出電壓隨著溫度的升高而降低,這有助于溫度感知,因?yàn)闇囟壬邔?dǎo)致摩擦電荷的發(fā)射。 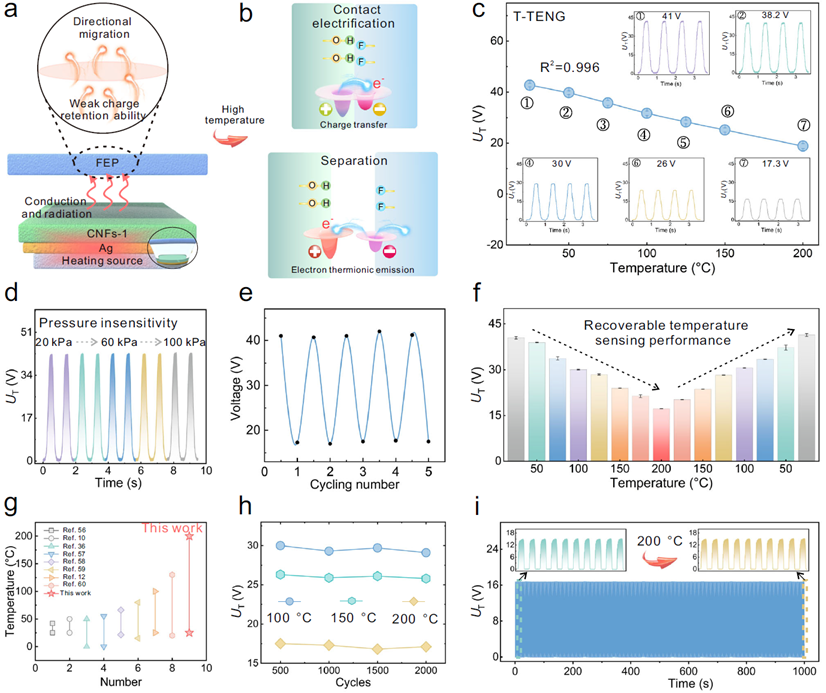 圖4 溫度傳感 ? ? ? 在實(shí)際應(yīng)用中,需要同時(shí)獨(dú)立地檢測(cè)多個(gè)刺激。多個(gè)耦合刺激之間的信號(hào)干擾會(huì)影響傳感器的準(zhǔn)確性,這要求傳感器具有低交叉干擾和穩(wěn)定的解耦能力(圖5a)。討論了在固定壓力和不同溫度下,多模態(tài)摩擦電傳感器的信號(hào)干擾(圖5b)。與理論結(jié)相比,P-TENG和T-TENG因溫度干擾產(chǎn)生的交叉耦合誤差分別小于0.4%和3.2%,表明壓力和溫度之間具有低交叉靈敏度。
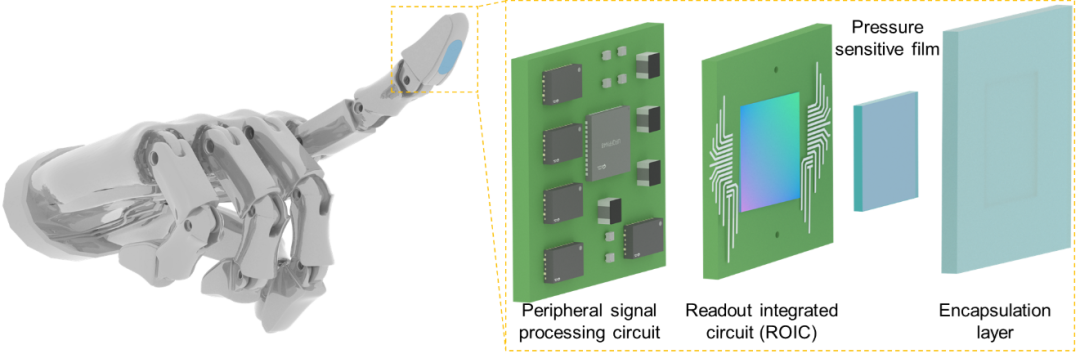
圖4 溫度傳感 ? ? ? 在實(shí)際應(yīng)用中,需要同時(shí)獨(dú)立地檢測(cè)多個(gè)刺激。多個(gè)耦合刺激之間的信號(hào)干擾會(huì)影響傳感器的準(zhǔn)確性,這要求傳感器具有低交叉干擾和穩(wěn)定的解耦能力(圖5a)。討論了在固定壓力和不同溫度下,多模態(tài)摩擦電傳感器的信號(hào)干擾(圖5b)。與理論結(jié)相比,P-TENG和T-TENG因溫度干擾產(chǎn)生的交叉耦合誤差分別小于0.4%和3.2%,表明壓力和溫度之間具有低交叉靈敏度。 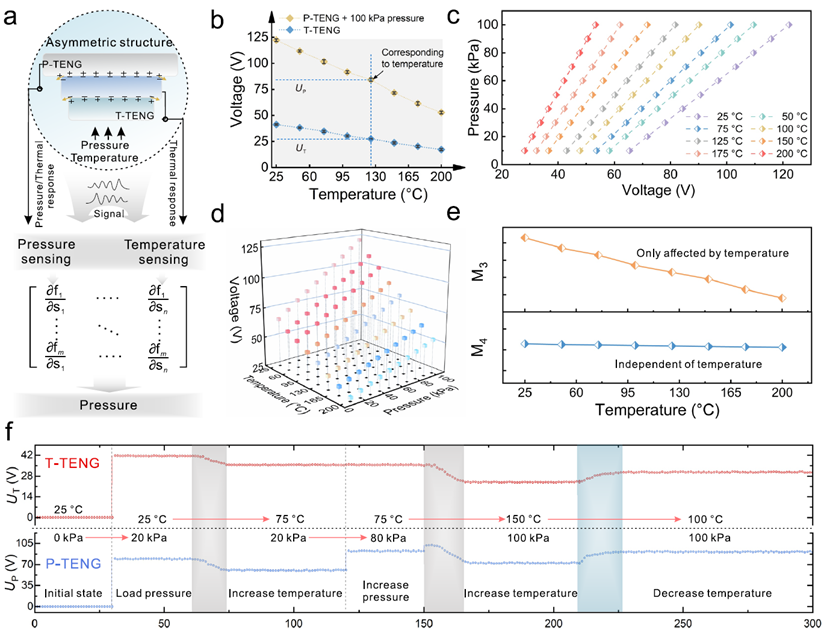 圖5 單一摩擦電傳感器中的壓力-溫度解耦和雙模態(tài)感知 ? ? ? 機(jī)器人技術(shù)利用多模態(tài)傳感器并結(jié)合人工智能技術(shù),解鎖跨學(xué)科領(lǐng)域的智能數(shù)據(jù)分析,實(shí)現(xiàn)復(fù)雜的手勢(shì)和物體識(shí)別。因此,為了更好地展示觸覺(jué)傳感器在實(shí)際場(chǎng)景中的壓力/溫度響應(yīng)能力,傳感器被集成到機(jī)器人手的五個(gè)指尖中,形成一個(gè)智能觸覺(jué)系統(tǒng),用于識(shí)別未知物體(圖6a)。
圖5 單一摩擦電傳感器中的壓力-溫度解耦和雙模態(tài)感知 ? ? ? 機(jī)器人技術(shù)利用多模態(tài)傳感器并結(jié)合人工智能技術(shù),解鎖跨學(xué)科領(lǐng)域的智能數(shù)據(jù)分析,實(shí)現(xiàn)復(fù)雜的手勢(shì)和物體識(shí)別。因此,為了更好地展示觸覺(jué)傳感器在實(shí)際場(chǎng)景中的壓力/溫度響應(yīng)能力,傳感器被集成到機(jī)器人手的五個(gè)指尖中,形成一個(gè)智能觸覺(jué)系統(tǒng),用于識(shí)別未知物體(圖6a)。 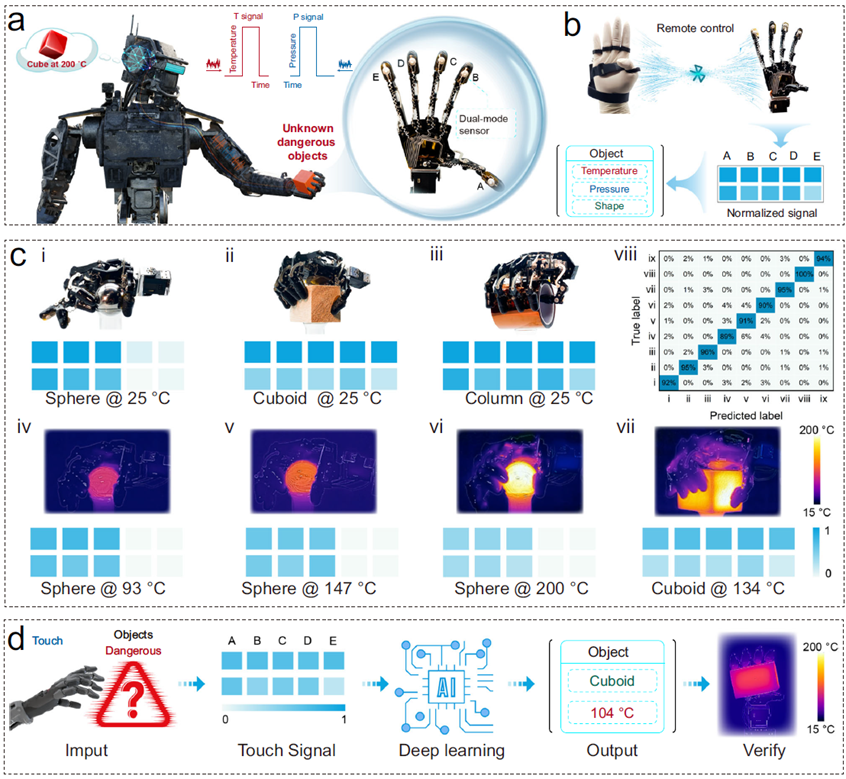 圖6 高溫環(huán)境中的觸覺(jué)感知 ? 結(jié)論與展望 ? ? 該研究展示了一種摩擦電觸覺(jué)傳感器,能夠響應(yīng)超出人類觸覺(jué)感知范圍的壓力/溫度,適用于極端環(huán)境。該觸覺(jué)傳感器基于摩擦電納米發(fā)電機(jī)技術(shù),采用穩(wěn)定的纖維素摩擦電材料在高溫下工作,并設(shè)計(jì)了一個(gè)不對(duì)稱結(jié)構(gòu),可以獨(dú)立輸出雙信號(hào),實(shí)現(xiàn)高溫環(huán)境中的多重刺激響應(yīng)。該設(shè)備實(shí)現(xiàn)了無(wú)需外部電源的人機(jī)交互的實(shí)時(shí)數(shù)字響應(yīng)。然而,這項(xiàng)工作仍處于初步研究階段,通過(guò)跨學(xué)科集成(如設(shè)計(jì)隔熱和阻燃材料、擴(kuò)展無(wú)線插件等),還可以在極端環(huán)境中實(shí)現(xiàn)更復(fù)雜的應(yīng)用。該傳感器的可調(diào)節(jié)尺寸特性有助于規(guī)模化集成。結(jié)合機(jī)器學(xué)習(xí)技術(shù),能夠進(jìn)一步精確識(shí)別高溫環(huán)境中物體的形狀和溫度。所提出的自供電多模態(tài)傳感系統(tǒng)為發(fā)展前沿技術(shù)提供了設(shè)計(jì)思路。 ? ?
圖6 高溫環(huán)境中的觸覺(jué)感知 ? 結(jié)論與展望 ? ? 該研究展示了一種摩擦電觸覺(jué)傳感器,能夠響應(yīng)超出人類觸覺(jué)感知范圍的壓力/溫度,適用于極端環(huán)境。該觸覺(jué)傳感器基于摩擦電納米發(fā)電機(jī)技術(shù),采用穩(wěn)定的纖維素摩擦電材料在高溫下工作,并設(shè)計(jì)了一個(gè)不對(duì)稱結(jié)構(gòu),可以獨(dú)立輸出雙信號(hào),實(shí)現(xiàn)高溫環(huán)境中的多重刺激響應(yīng)。該設(shè)備實(shí)現(xiàn)了無(wú)需外部電源的人機(jī)交互的實(shí)時(shí)數(shù)字響應(yīng)。然而,這項(xiàng)工作仍處于初步研究階段,通過(guò)跨學(xué)科集成(如設(shè)計(jì)隔熱和阻燃材料、擴(kuò)展無(wú)線插件等),還可以在極端環(huán)境中實(shí)現(xiàn)更復(fù)雜的應(yīng)用。該傳感器的可調(diào)節(jié)尺寸特性有助于規(guī)模化集成。結(jié)合機(jī)器學(xué)習(xí)技術(shù),能夠進(jìn)一步精確識(shí)別高溫環(huán)境中物體的形狀和溫度。所提出的自供電多模態(tài)傳感系統(tǒng)為發(fā)展前沿技術(shù)提供了設(shè)計(jì)思路。 ? ?
論 文 信 息
Title:Triboelectric tactile sensor for pressure and temperature sensing in high-temperature applications Authors:Yanhua Liu, Jinlong Wang, Tao Liu, Zhiting Wei, Bin Luo, Mingchao Chi, Song Zhang, Chenchen Cai, Cong Gao, Tong Zhao, Shuangfei Wang & Shuangxi Nie Journal:Nature Communications DOI:https://doi.org/10.1038/s41467-024-55771-0
審核編輯 黃宇
-
溫度傳感
+關(guān)注
關(guān)注
3文章
60瀏覽量
28090 -
觸覺(jué)傳感器
+關(guān)注
關(guān)注
4文章
127瀏覽量
10428
發(fā)布評(píng)論請(qǐng)先 登錄
北京理工大學(xué)與中國(guó)科學(xué)院:研究自適應(yīng)模量壓力傳感器陣列,賦能無(wú)線觸覺(jué)可視化

西湖大學(xué):研發(fā)CMOS兼容壓力傳感器陣列,實(shí)現(xiàn)精準(zhǔn)觸覺(jué)感知功能
技術(shù)資訊 I 不同類型的溫度傳感器

探索Thermometrics壓力與溫度組合傳感器:卓越性能與廣泛應(yīng)用

實(shí)現(xiàn)耐高溫壓力傳感器內(nèi)部引線鍵的作用與維護(hù)方式?

耐高溫壓力傳感器芯體材質(zhì)在未來(lái)的發(fā)展方向
氣體壓力傳感器工作溫度性能受到多種因素影響
如何優(yōu)化氣體壓力傳感器性能,提高傳感器測(cè)量精度?
溫度壓力一體化傳感器在工業(yè)自動(dòng)化中的廣泛應(yīng)用

柔性觸覺(jué)傳感器的主要技術(shù)路線
廣西大學(xué):仿生超疏水纖維素摩擦電材料用于高溫傳感
A股國(guó)產(chǎn)力傳感器龍頭柯力傳感投資北京一家觸覺(jué)傳感器公司“他山科技”
觸覺(jué)傳感器已在亞馬遜倉(cāng)儲(chǔ)機(jī)械臂率先商用 新增形式有望加速市場(chǎng)增長(zhǎng)節(jié)奏

【應(yīng)用】TE高精度壓力傳感器SM9541系列可精確檢測(cè)通風(fēng)系統(tǒng)中的壓力變化




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論