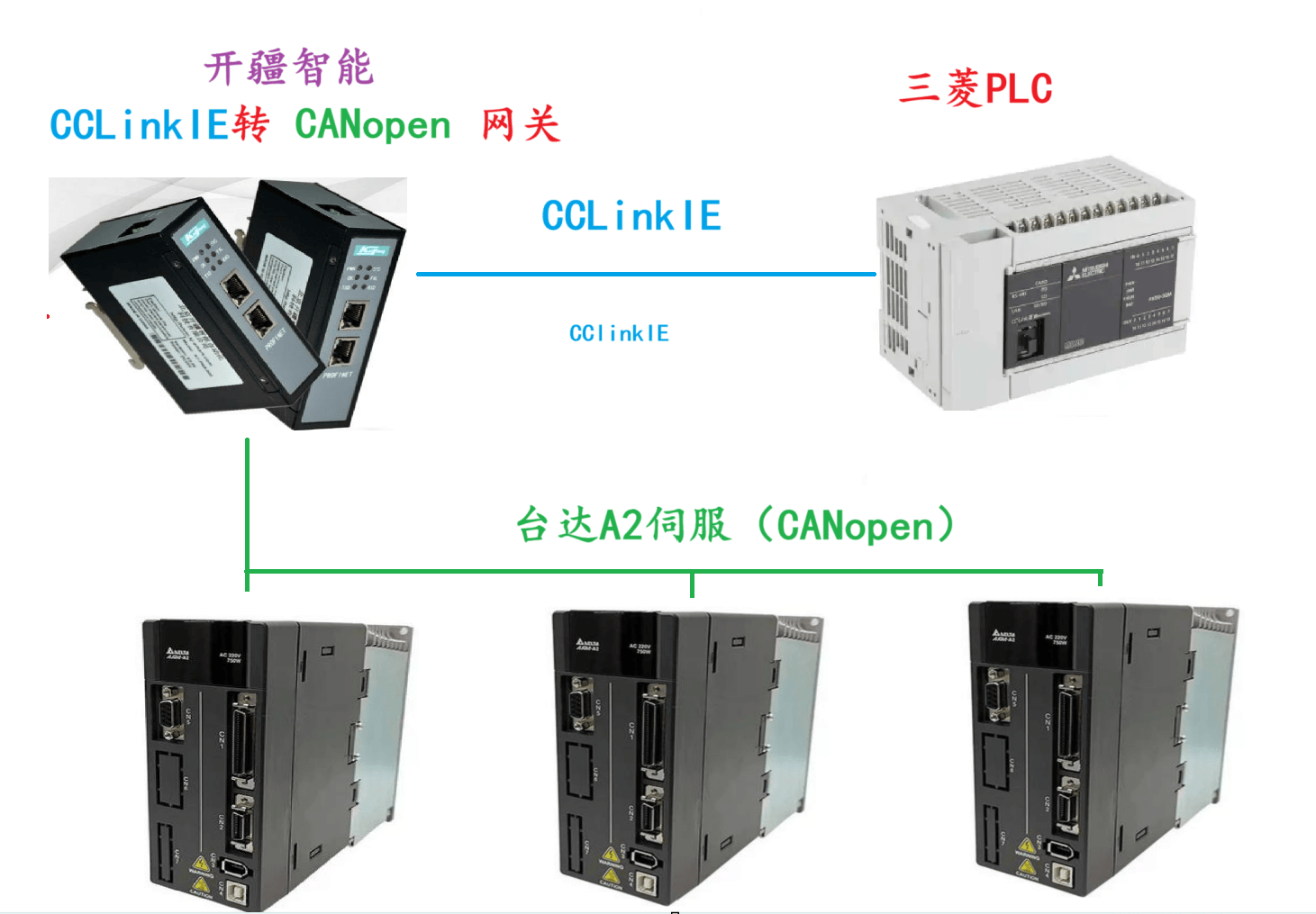
 步科伺服驅動器通過CCLinkIE轉CANopen網關的標準化控制網絡接入
步科伺服驅動器通過CCLinkIE轉CANopen網關的標準化控制網絡接入

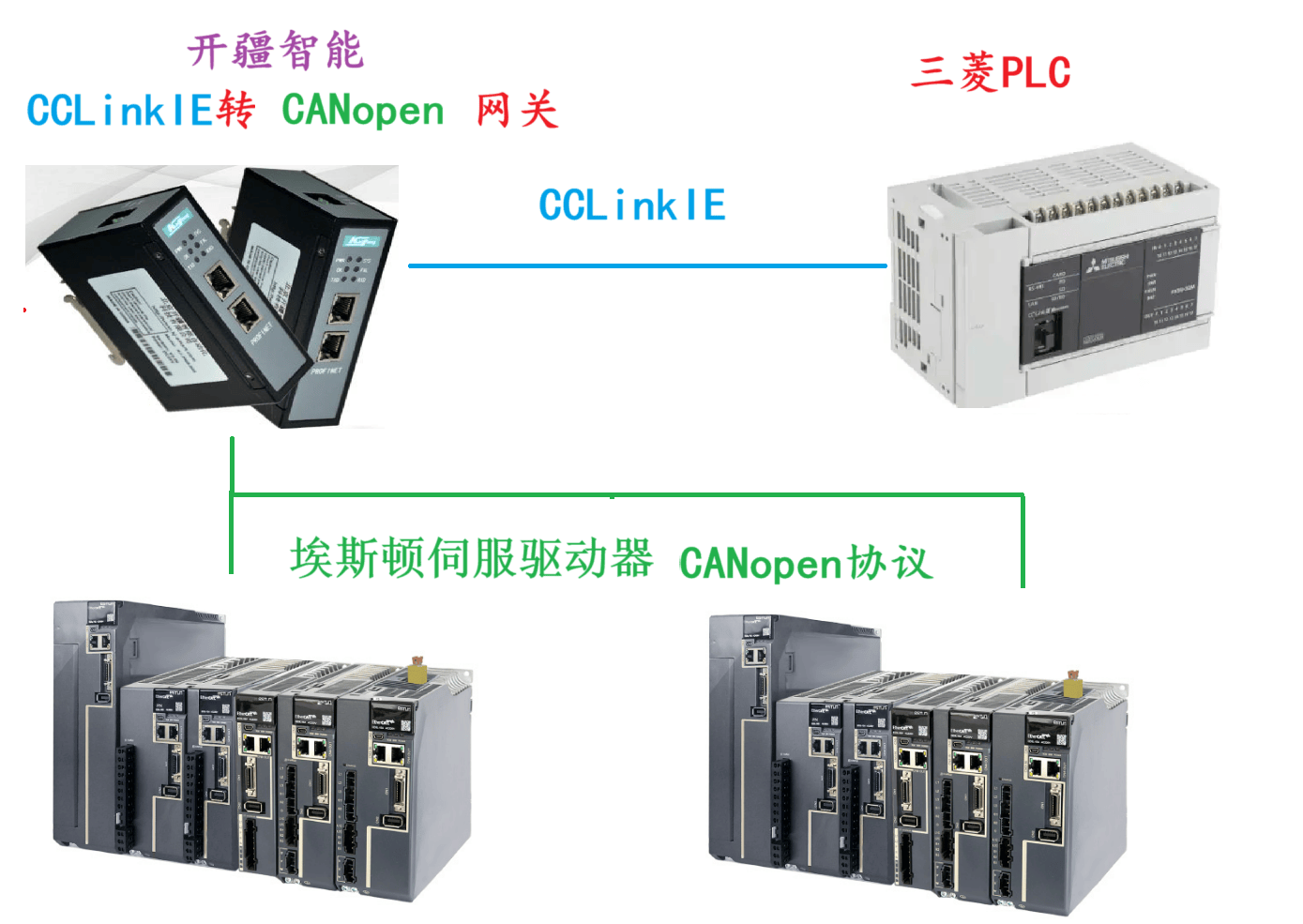
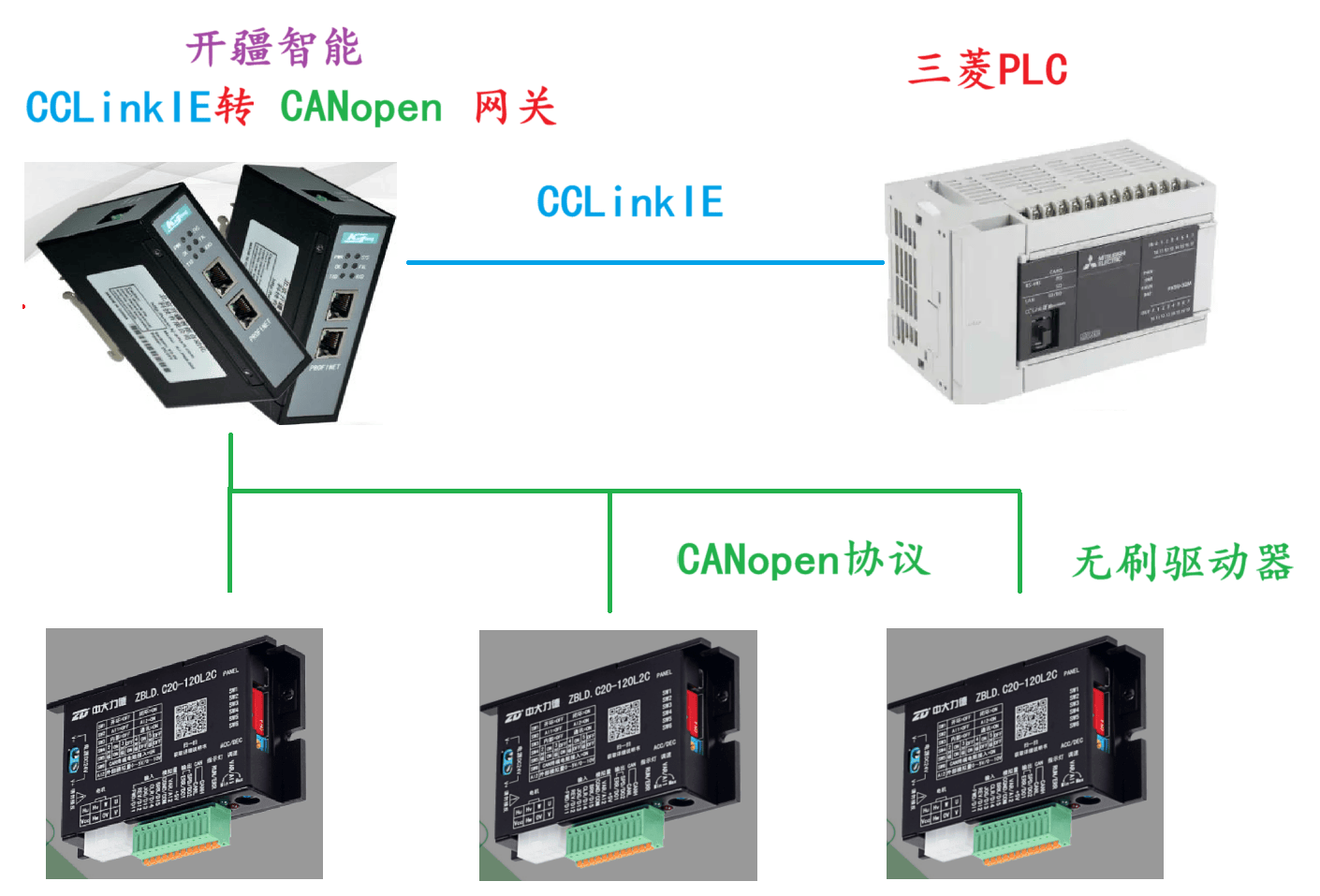
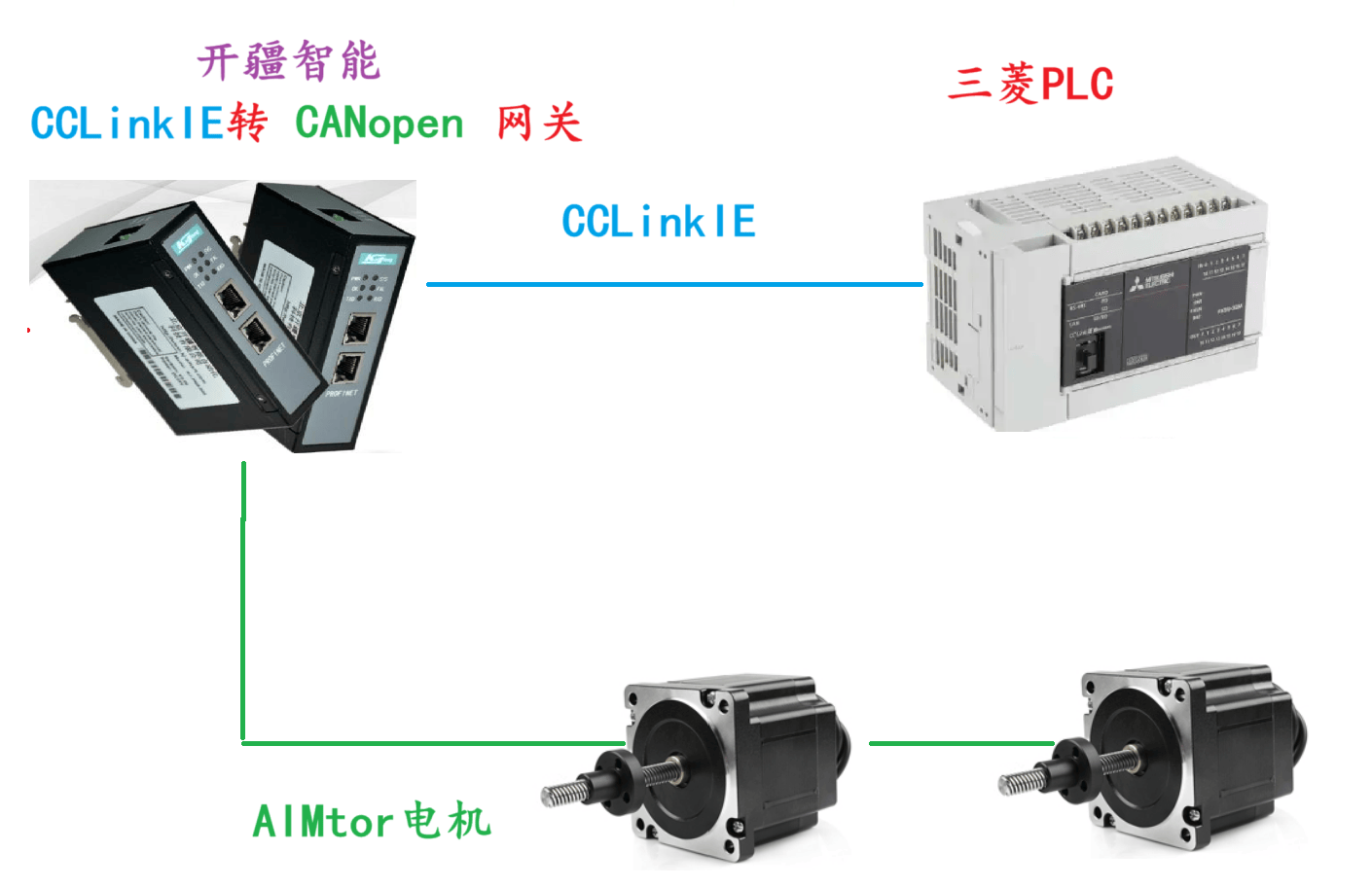
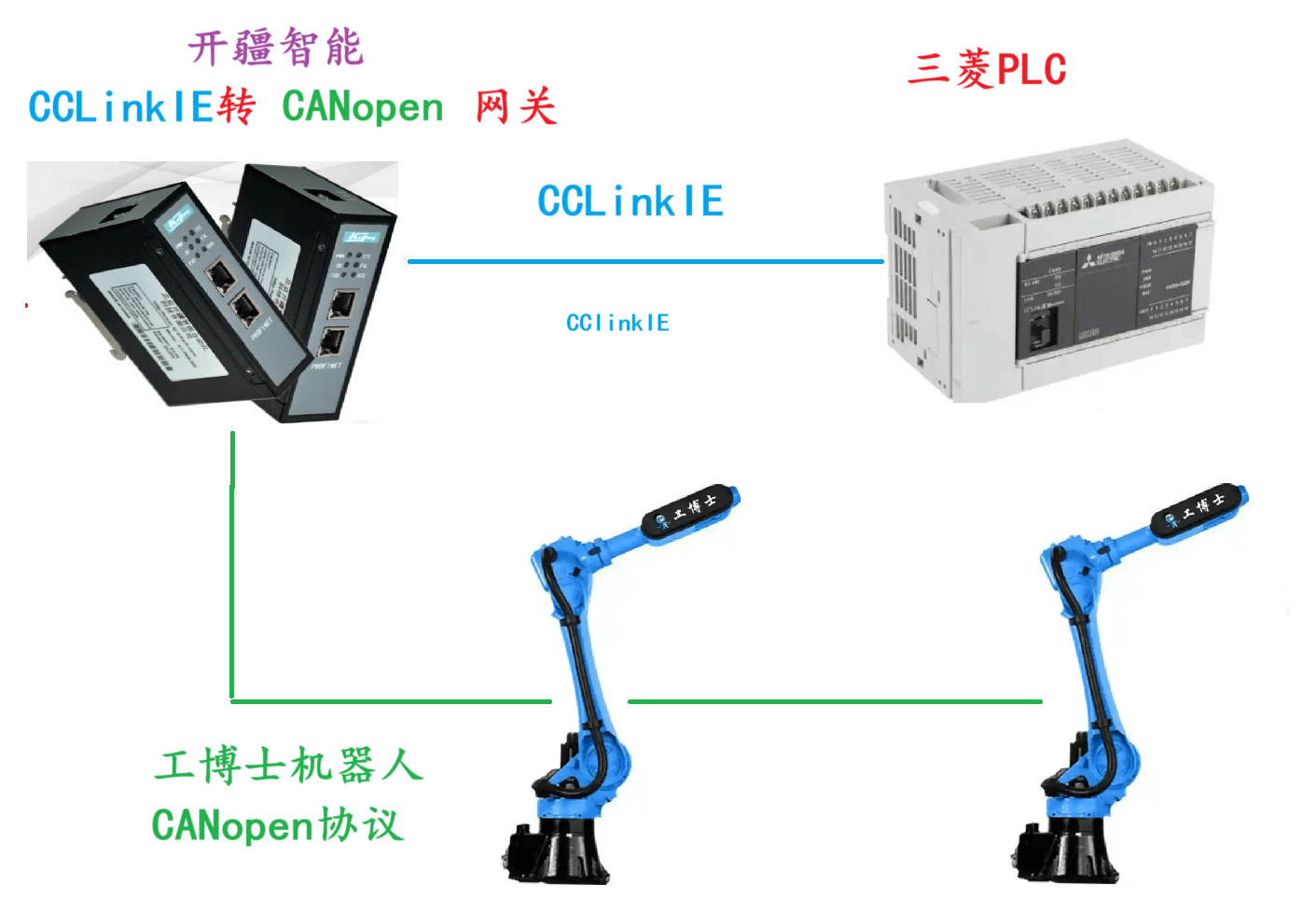
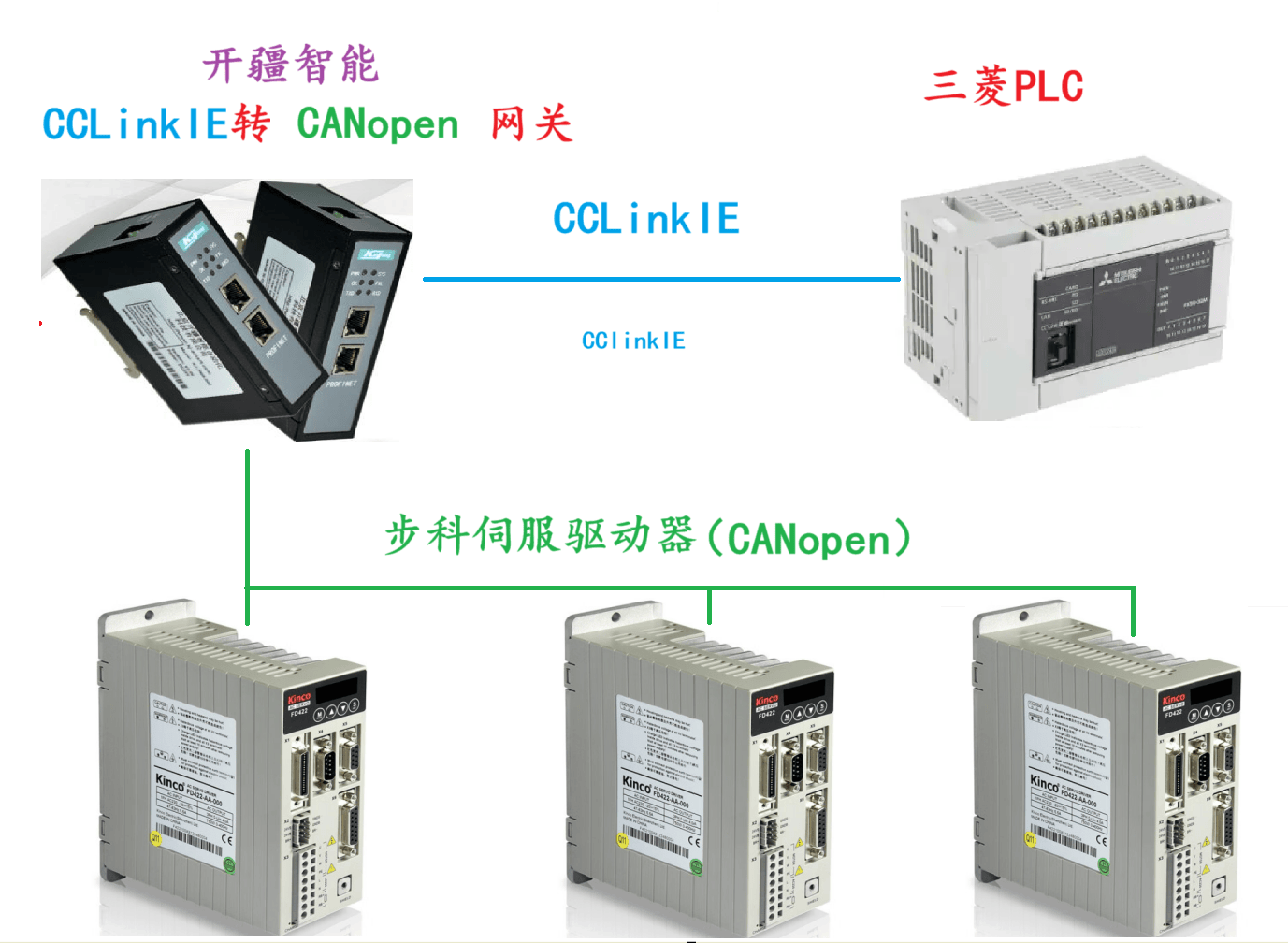
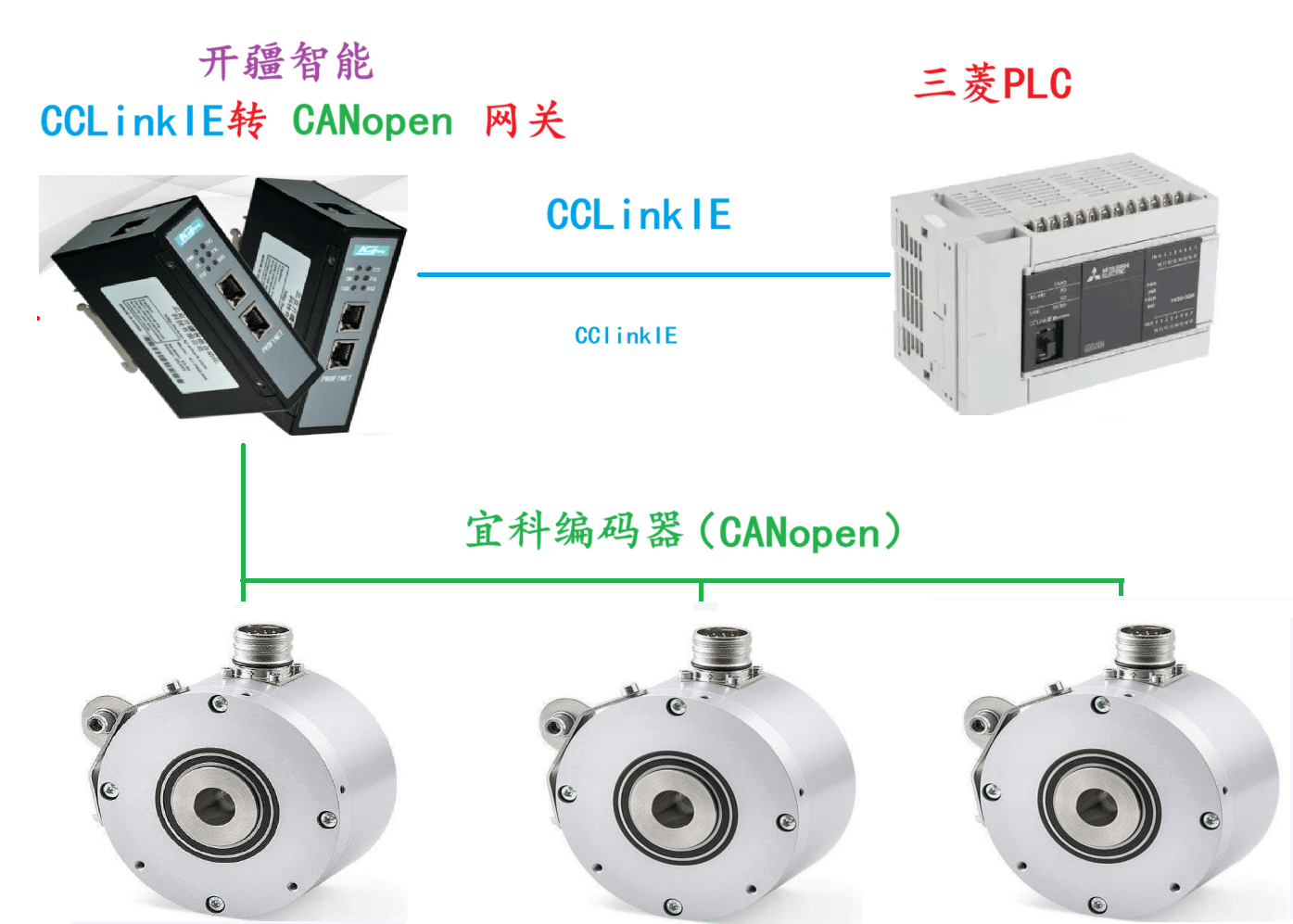
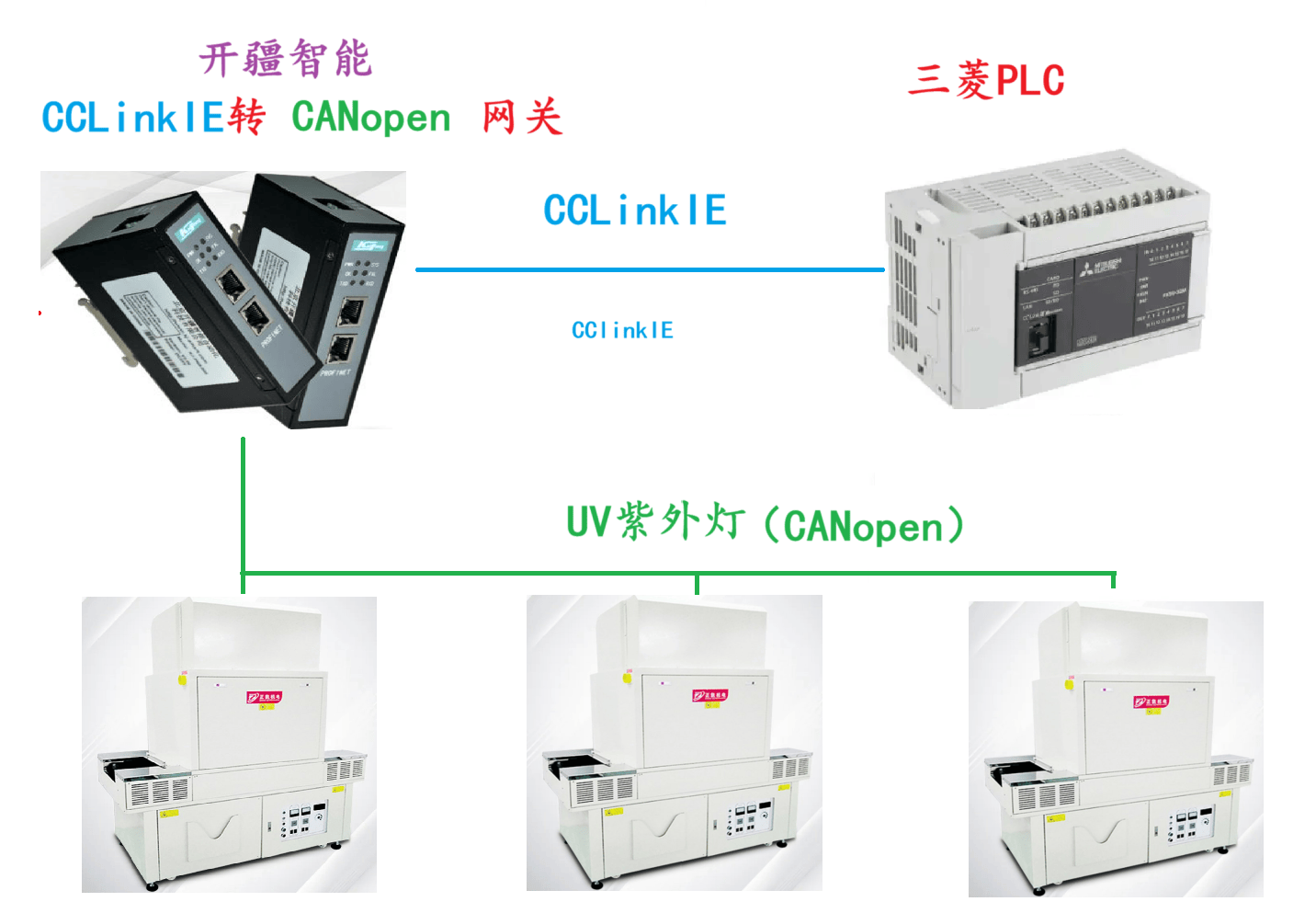
本案例是客戶的三菱PLC通過CCLinkIE轉CANopen網關連接步科伺服驅動器。具體配置步驟如下。

首先著手進行網關的配置工作。開啟網關配置軟件“CANopentiConfigurationStudio”,新建一個項目并選定“CCLinkIE轉CANopen”。對網關CANopen一側的波特率以及CC-LinkIE側的參數進行設置。CANopen一側著重設置波特率和通信周期參數。
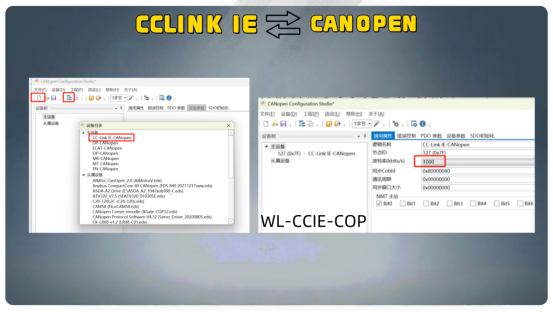
在CCLink一側,需對IP地址以及邏輯占用數量進行設置,且應確保這些設置與三菱PLC的相應設置保持一致。導入從站伺服的電子數據單(EDS)文件。
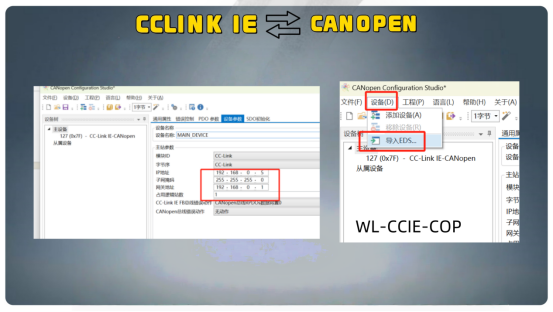
完成導入操作后,把站點納入網關組態之中。
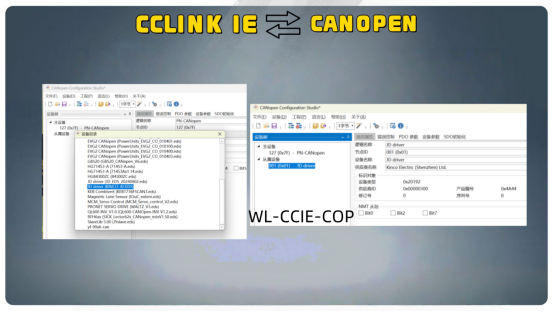
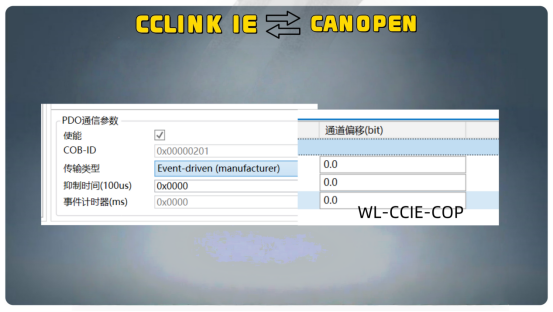
對從站過程數據對象(PDO)所囊括的索引索引以及通信通信參數加以設定。分別對RPDO和TPDO所涉及的索引參數(如控制字、狀態字、位置、速度、模式等)予以配置。
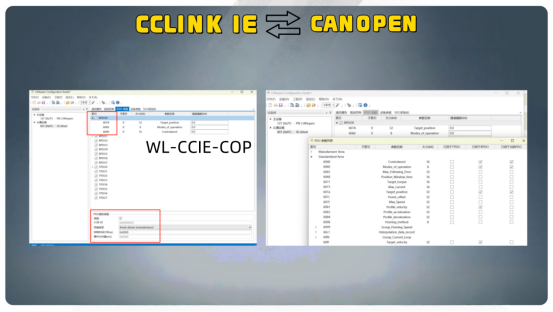
通信參數主要包含與傳輸類型緊密相關的參數以及與觸發模式緊密相關的參數。在完成參數添加操作之后,開展參數通道映射的分配工作。
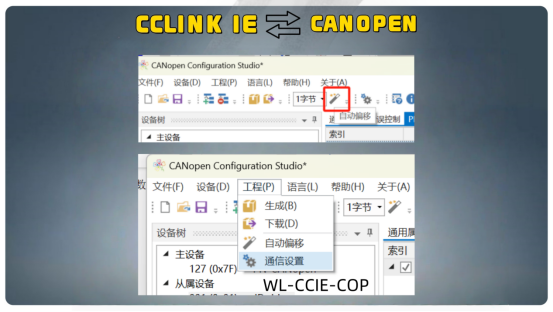
觸發自動偏移功能時,網關將自動對排序對應的可編程邏輯控制器(PLC)一側的輸入輸出點進行分配。在確保配置精確無誤之后,將組態信息下載至網關。具體操作流程如下:首先,點擊“工程-通信設置”功能模塊。對網關默認IP地址進行掃描(電腦需保證計算機與網關處于同一網絡網段),待完成連接后,點擊“生成-下載”指令,即可將配置信息下載至網關設備。
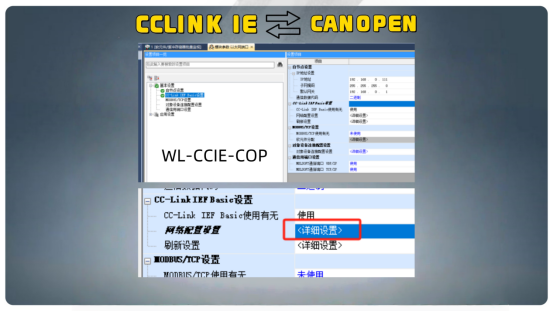
PLC配置,開啟三菱可編程邏輯控制器(PLC)組態軟件GXWORK3,對CC-LinkIE一側的參數配置予以設置,首要步驟為設定PLC的IP地址。通過雙擊“詳細設置”選項,進入CClinkIE配置界面。
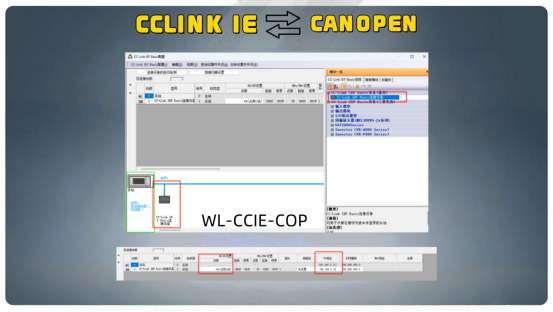
補充通用從站IP地址并計入占用點數,完成軟元件的配置后,需確保配置無誤,并將其程序下載至可編程邏輯控制器(PLC)。配置流程至此告一段落。隨后,應將所有相關設備進行連接,并施加電源,以便系統能夠順利啟動并進入正常工作狀態。
本案例通過 CCLinkIE 轉 CANopen 網關成功實現了三菱 PLC 對步科伺服驅動器的高精度控制,特別適合需要保留現有 CCLinkIE 主站同時擴展 CANopen 伺服的工業場景。實際應用中,需根據負載慣量調整驅動器的 PI 參數,確保動態響應與穩定性平衡。
審核編輯 黃宇
-
網關
+關注
關注
9文章
6767瀏覽量
56254 -
CANopen
+關注
關注
8文章
492瀏覽量
49009 -
伺服驅動器
+關注
關注
22文章
559瀏覽量
33503 -
CClink
+關注
關注
0文章
165瀏覽量
7737
發布評論請先 登錄
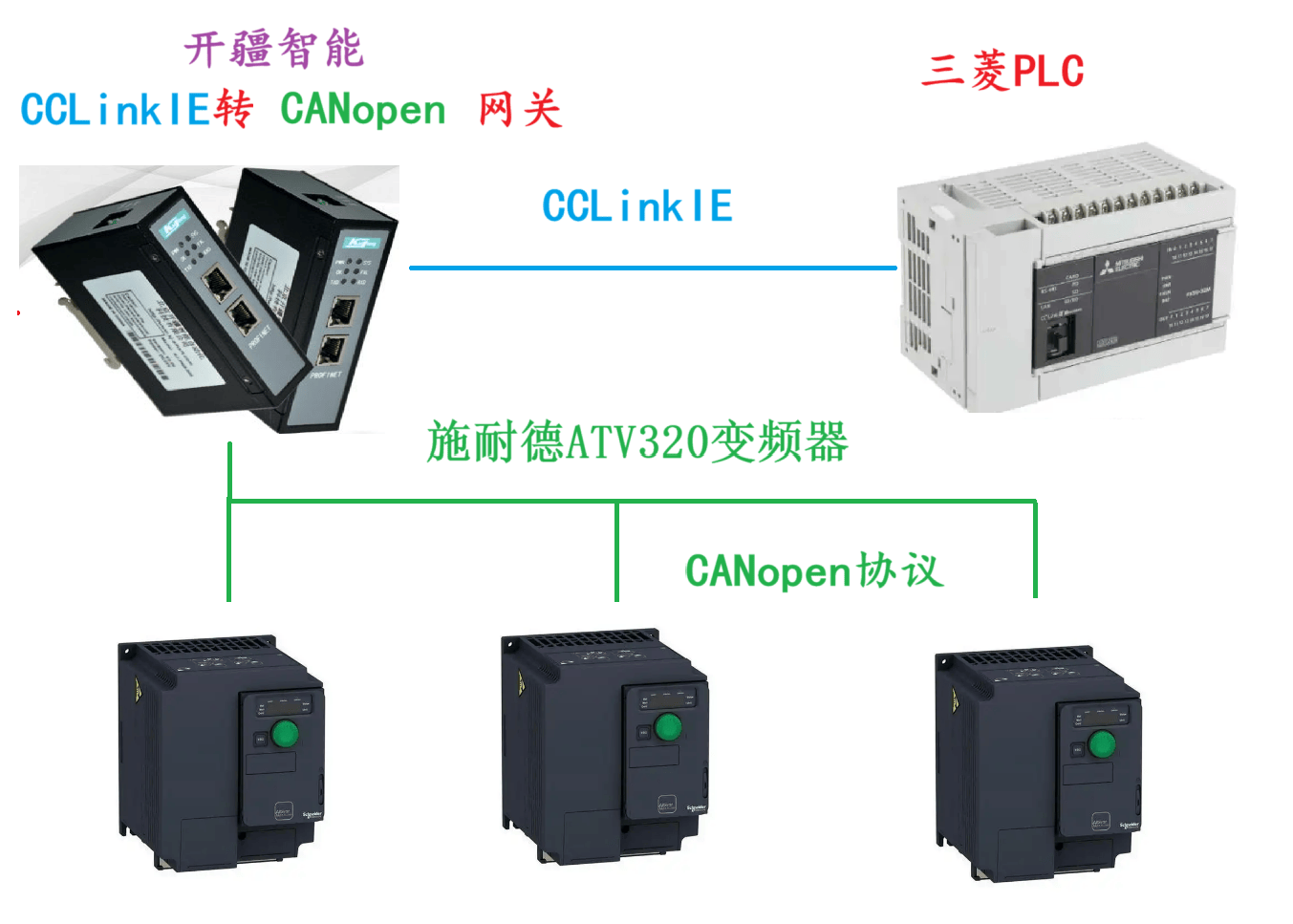
開疆智能CCLinkIE轉CANopen網關連接施耐德變頻器配置案例
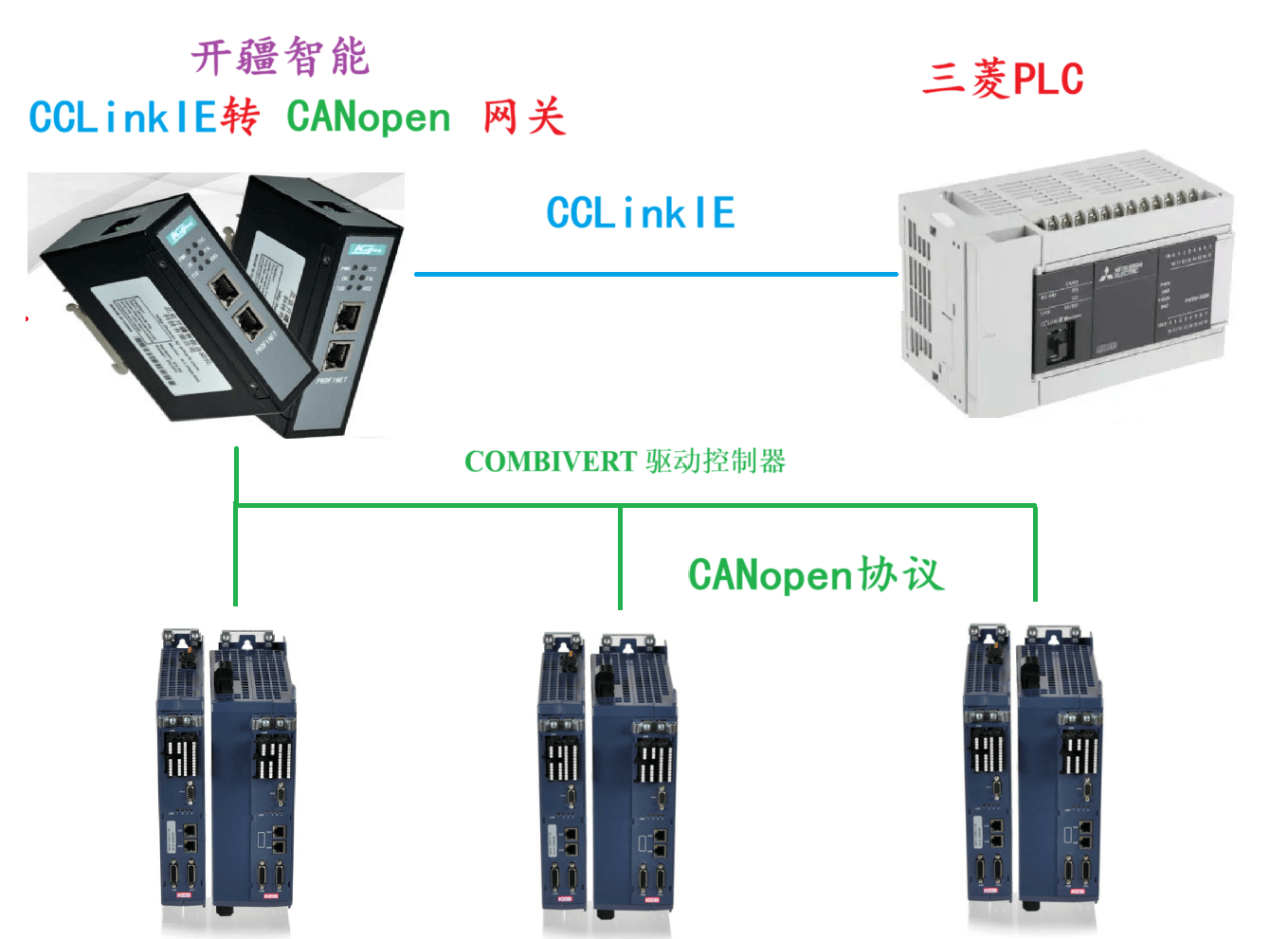
開疆智能CCLinkIE轉CANopen網關連接COMBIVERT驅動控制器配置案例
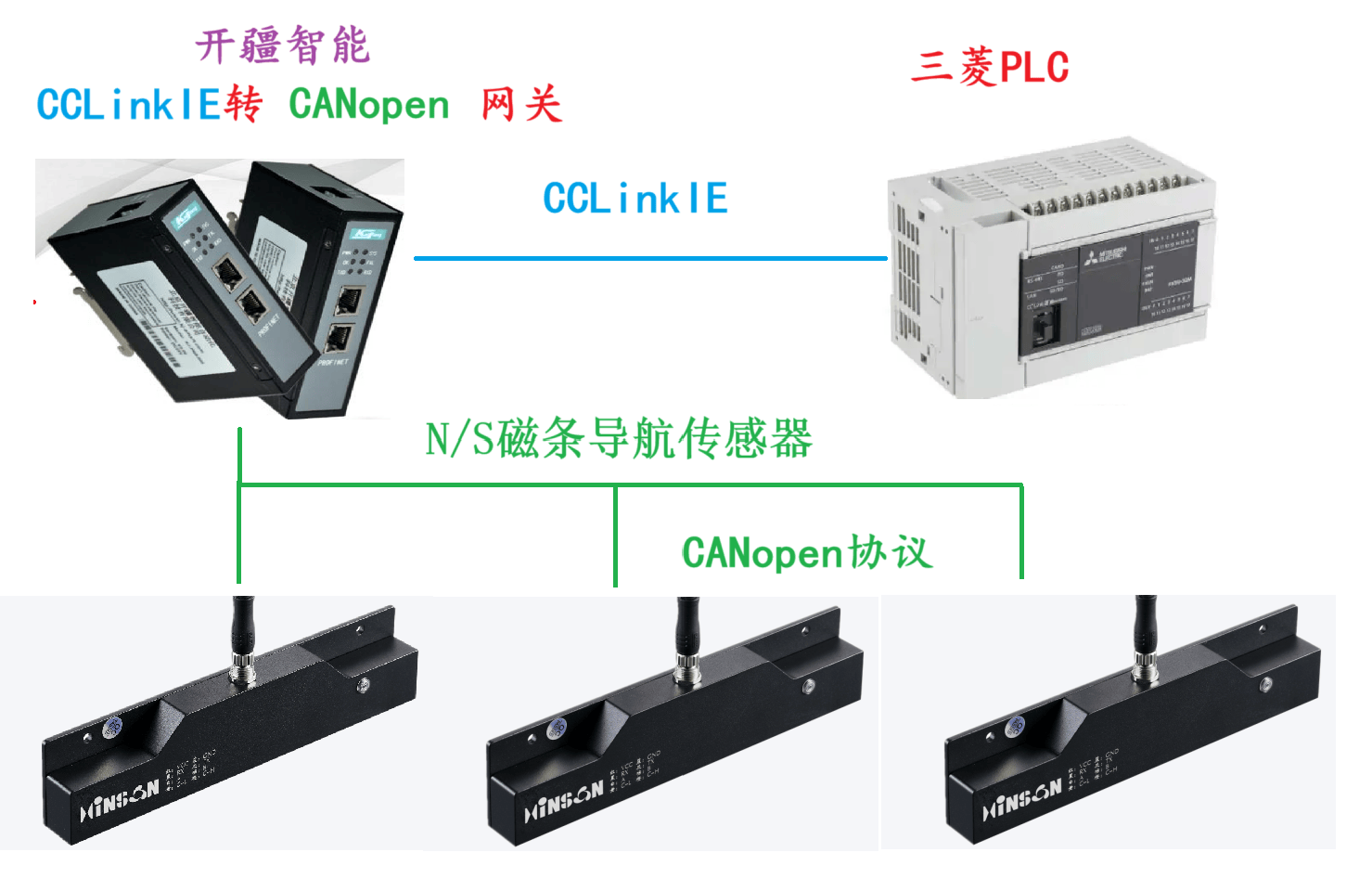
開疆智能CCLinkIE轉CANopen網關連接N/S磁條導航傳感器配置案例
開疆智能CCLinkIE轉CANopen網關連接四宏電機驅動器配置案例
開疆智能CCLinkIE轉CANopen網關連接GBS20機器人配置案例
開疆智能CCLinkIE轉Canopen網關連接UV紫外燈配置案例
EtherCAT主站轉Profinet網關接IS620N伺服驅動器與西門子plc通訊案例

CCLINKIE轉PROFINET:電機的“網絡沖浪神器”!
協議大和解:ETHERCAT轉CANopen網關配置

CANOpen轉PROFINET網關連接低壓伺服系統



 工商網監
工商網監
評論