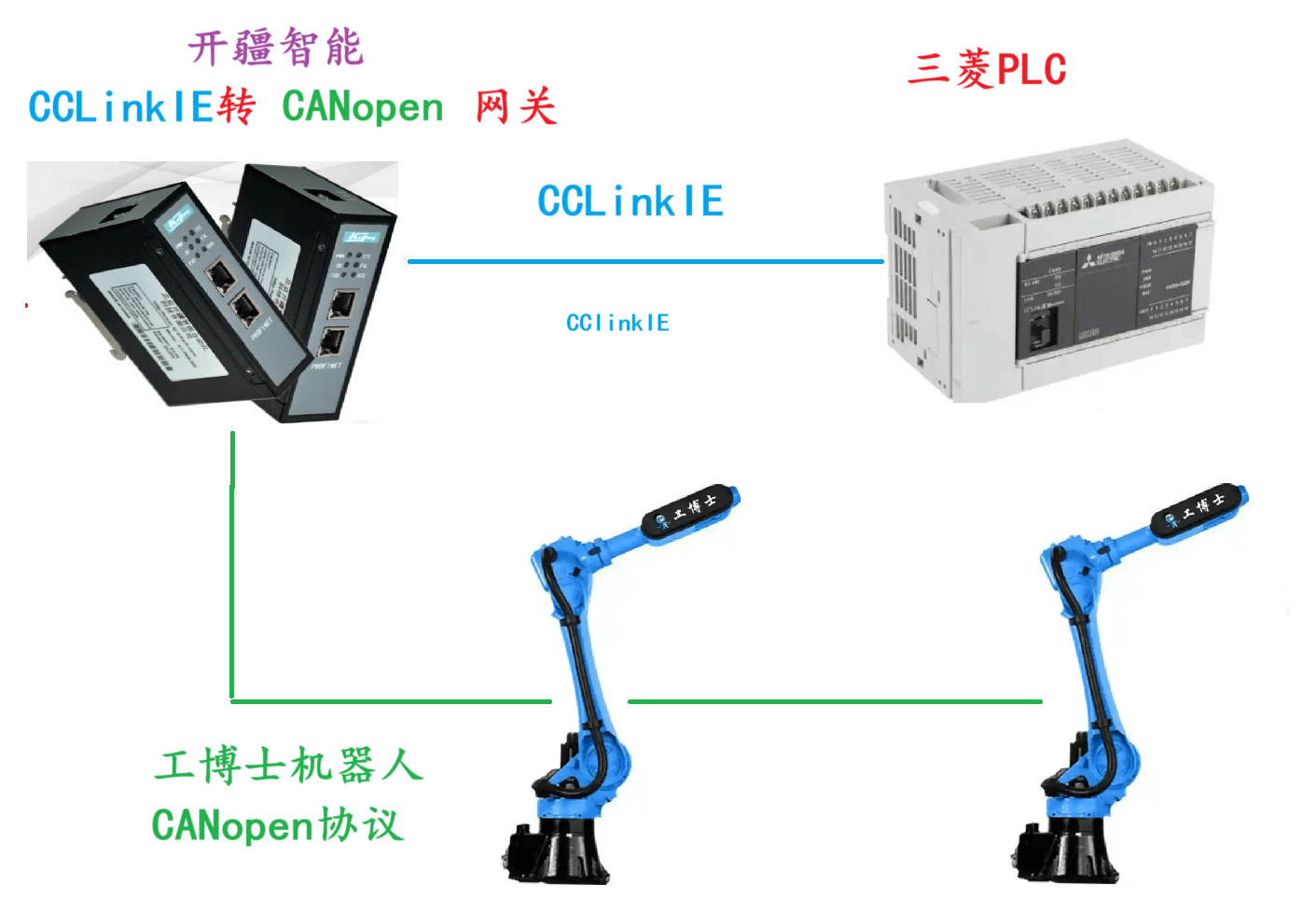
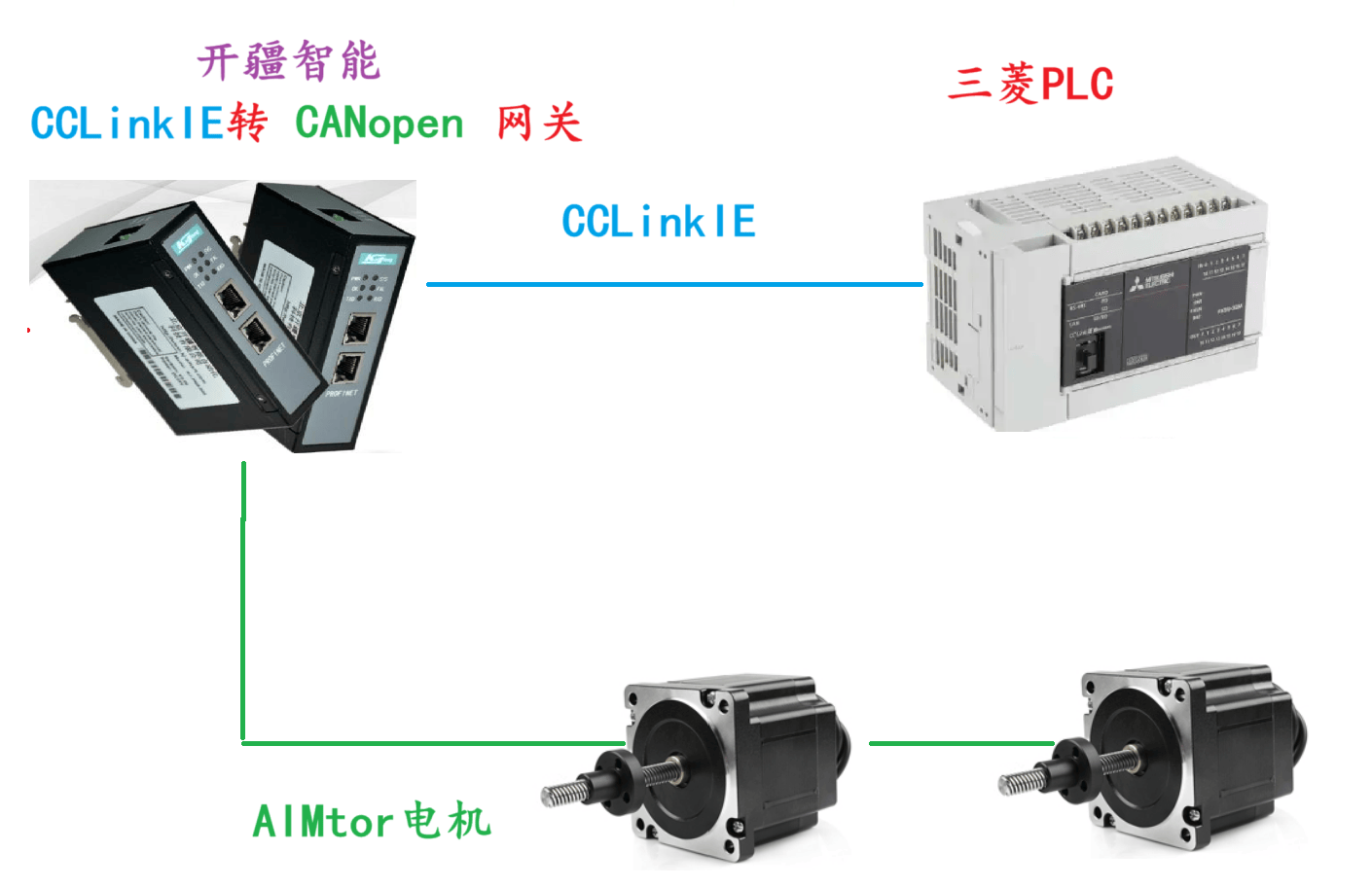
 開疆智能CCLinkIE轉CANopen網關連接GBS20機器人配置案例
開疆智能CCLinkIE轉CANopen網關連接GBS20機器人配置案例

本案例是客戶通過CCLinkIE轉CANopen網關連接GBS20機器人的配置案例
配置過程:
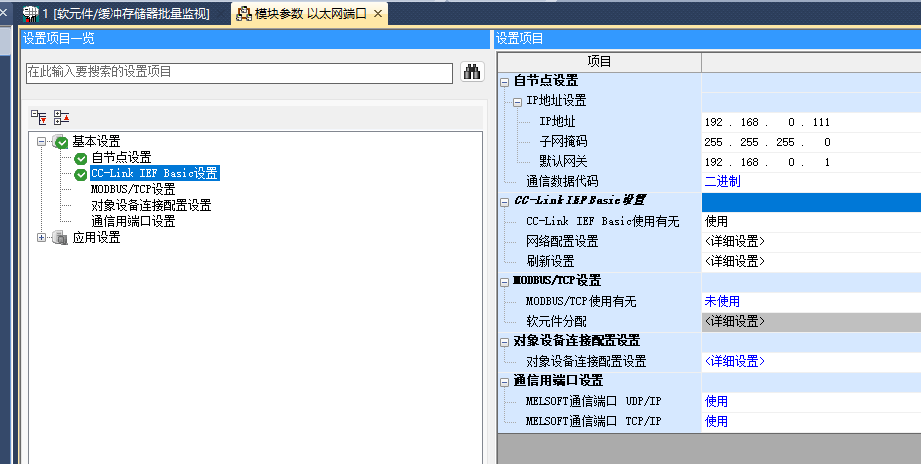
PLC配置
打開三菱PLC組態軟件GXWORK3設置CClinkIE一側的參數配置,首先設置PLC的IP地址
雙擊詳細設置進入CClinkIE配置
添加通用從站IP地址以及占用點數
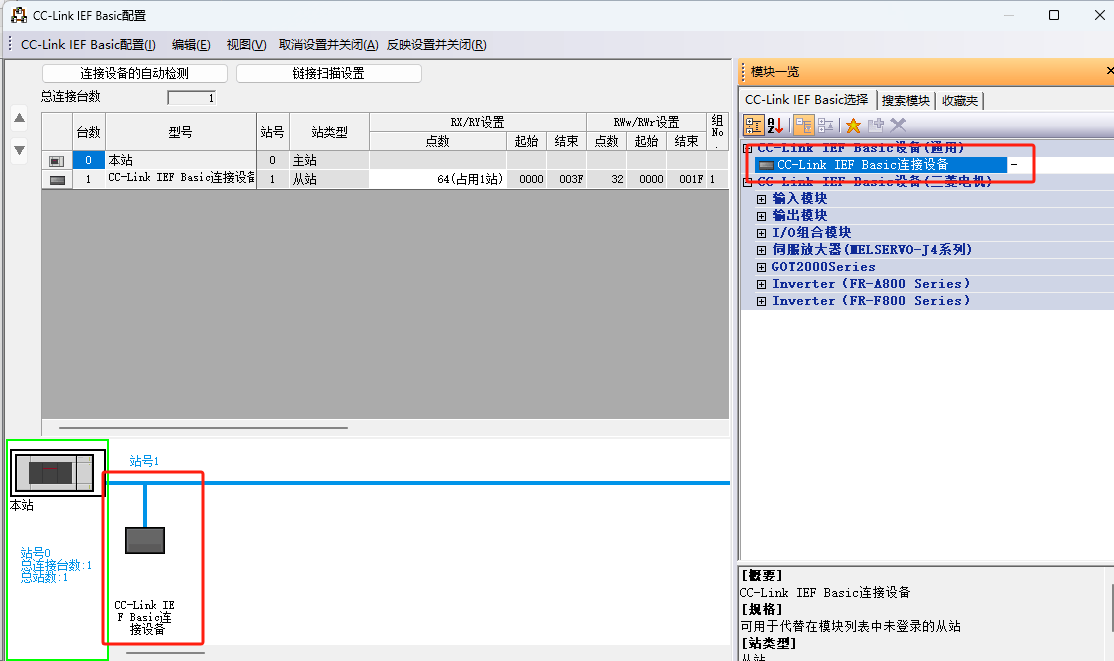

設置好分配的軟元件,確認無誤后下載到PLC。
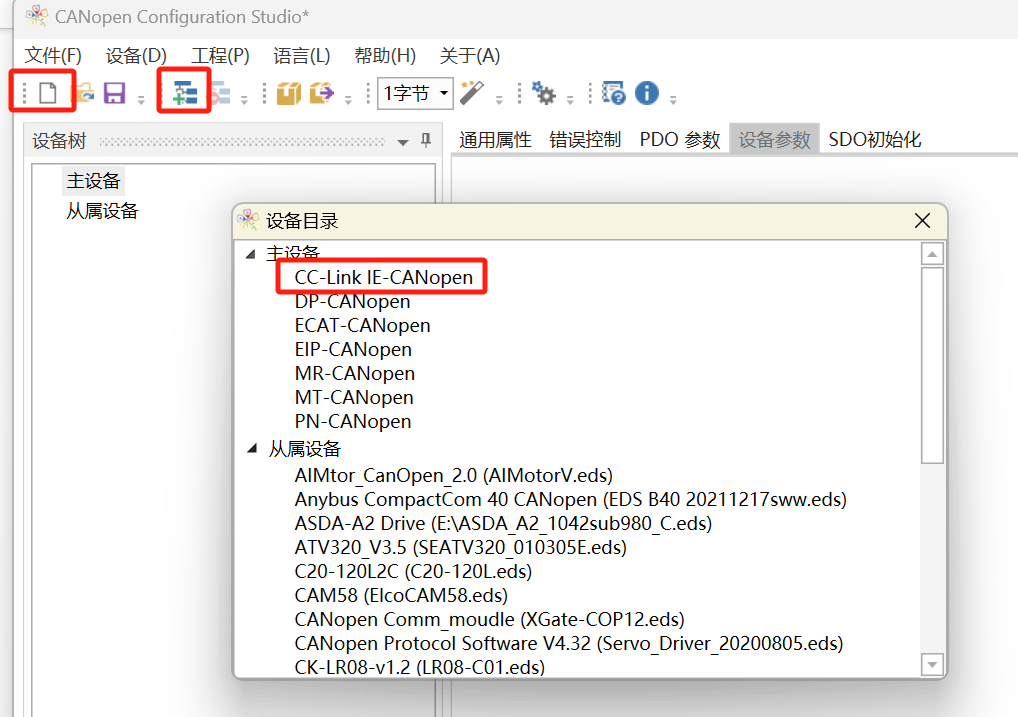
進行網關的配置。打開網關配置軟件“CANopen Configuration Studio”新建項目選擇“CCLinkIE轉CANopen”
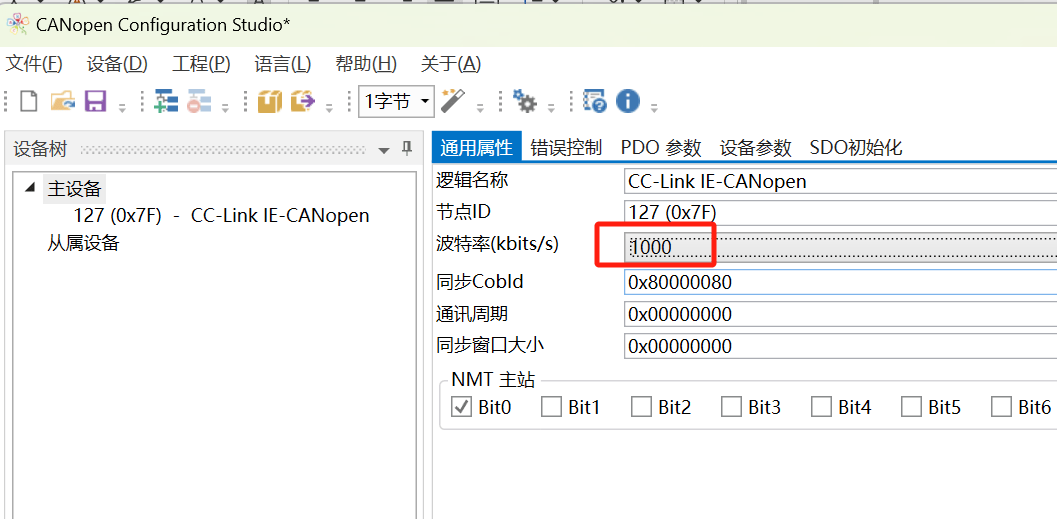
設置網關CANopen一側的波特率以及CCLinkIE側參數
Canopen一側主要設置波特率及通訊周期參數
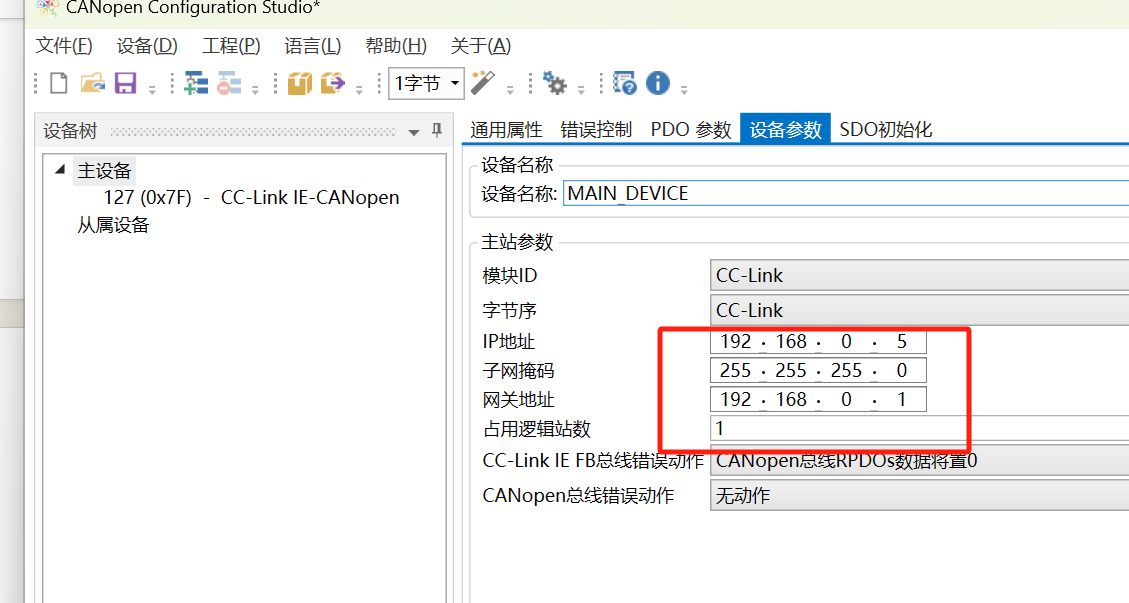
CCLink一側主要設置IP地址和邏輯占用數。與三菱PLC保持一致。
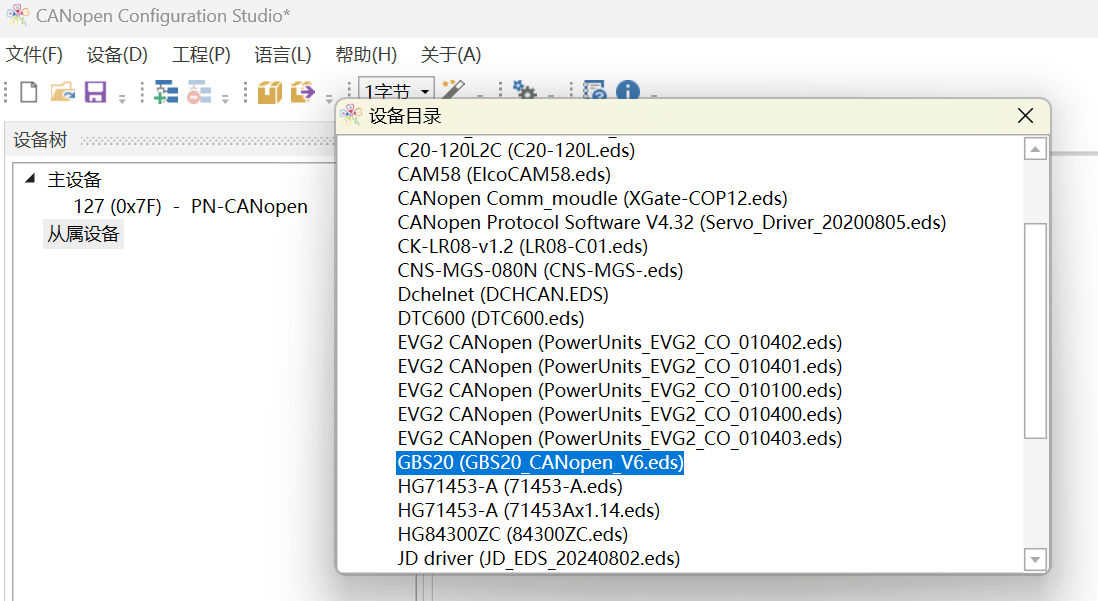
導入從站伺服EDS文件
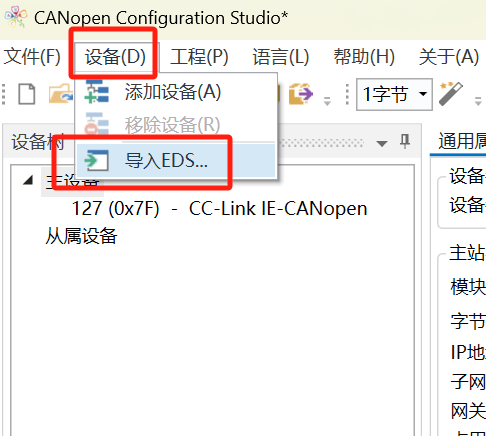
導入后將從站添加進網關組態
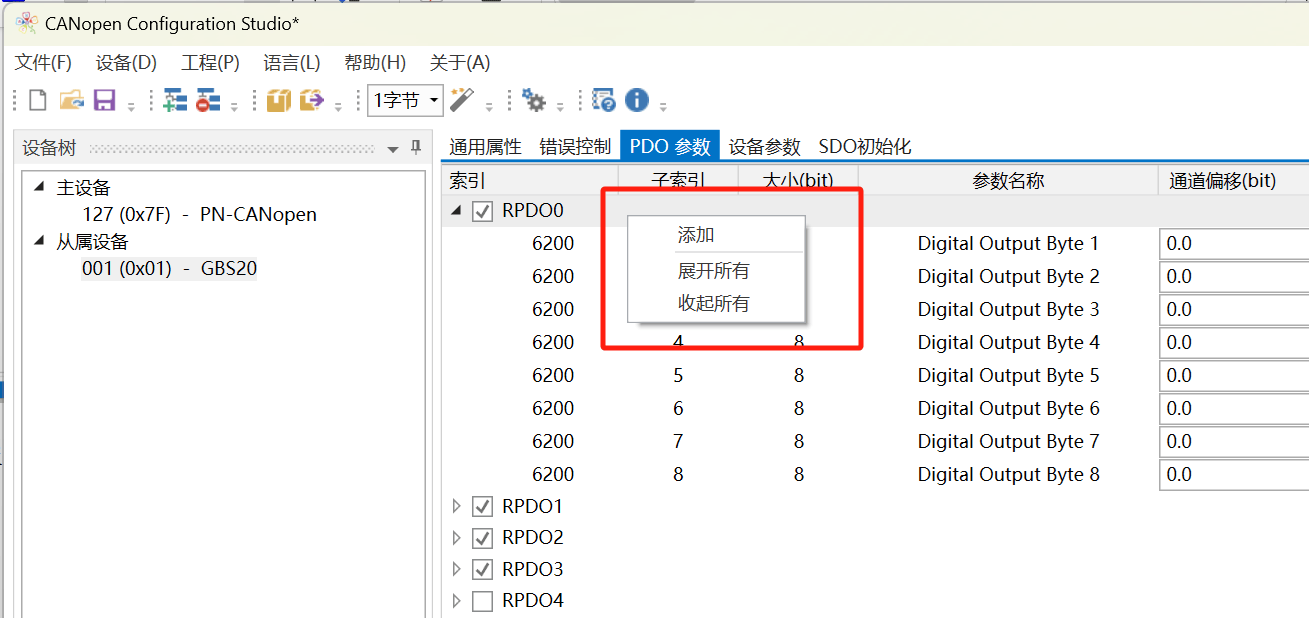
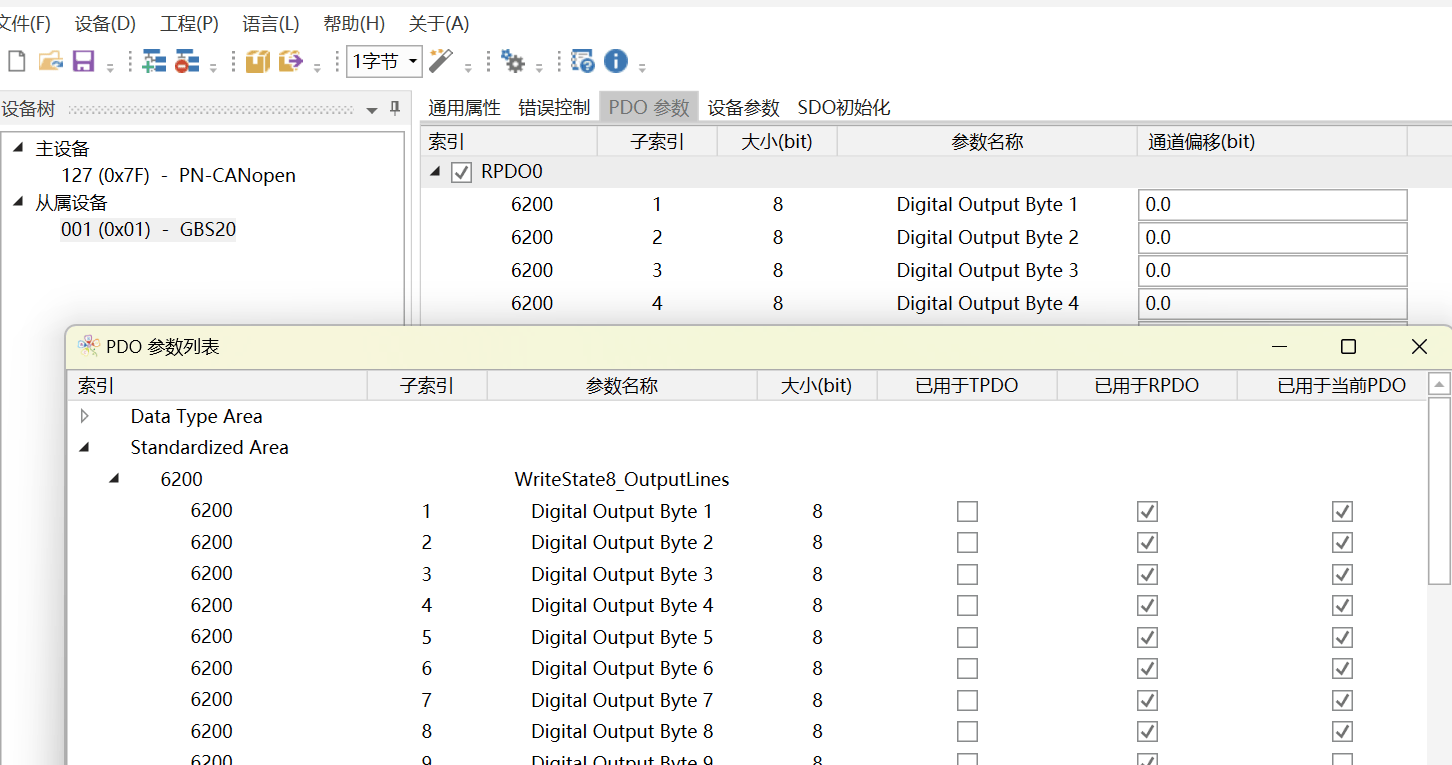
設置每個PDO包含的索引,點擊右鍵添加,每個PDO最多添加8個字節。
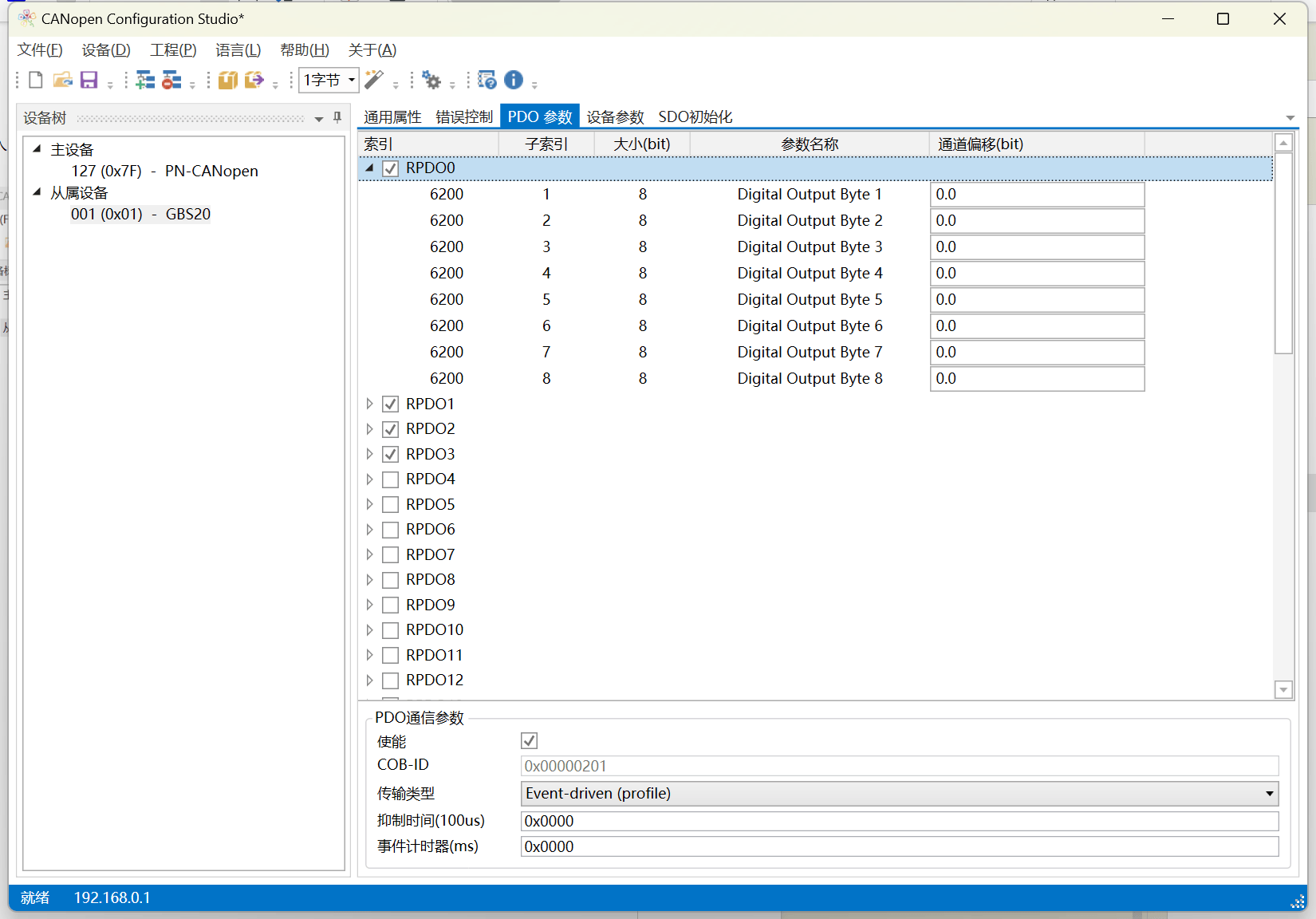
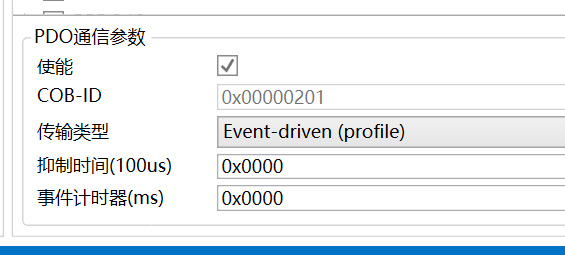
設置PDO的通訊參數,包括通訊類型,計數器時間,抑制時間等參數。
參數添加完成后分配參數的通道映射
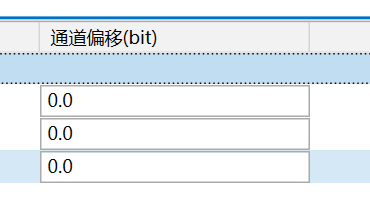
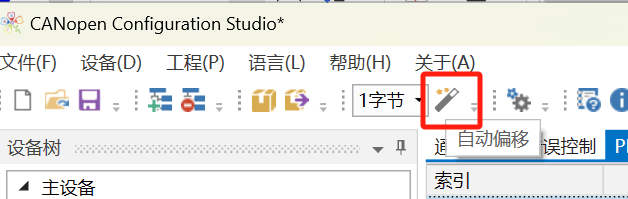
點擊自動偏移,網關會自動分配排序對應PLC一側的輸入輸出點。
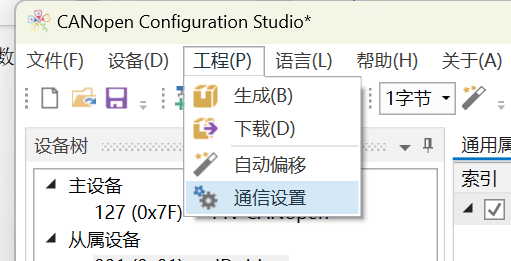
確認配置無誤后將組態下載至網關。首先點擊工程-通信設置。掃描網關默認IP(電腦與網關保持同一網段)連接后點擊生成-下載即可將配置下載進網關。
設置好機器人參數,將所有設備上電并連接后等待網關指示燈正常,即代表網關開始正常工作,PLC可對機器人進行讀寫。
審核編輯 黃宇
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
機器人
+關注
關注
213文章
31246瀏覽量
223114 -
網關
+關注
關注
9文章
6874瀏覽量
56463 -
CANopen
+關注
關注
8文章
493瀏覽量
49576 -
CClink
+關注
關注
0文章
167瀏覽量
7765
發布評論請先 登錄
相關推薦
熱點推薦
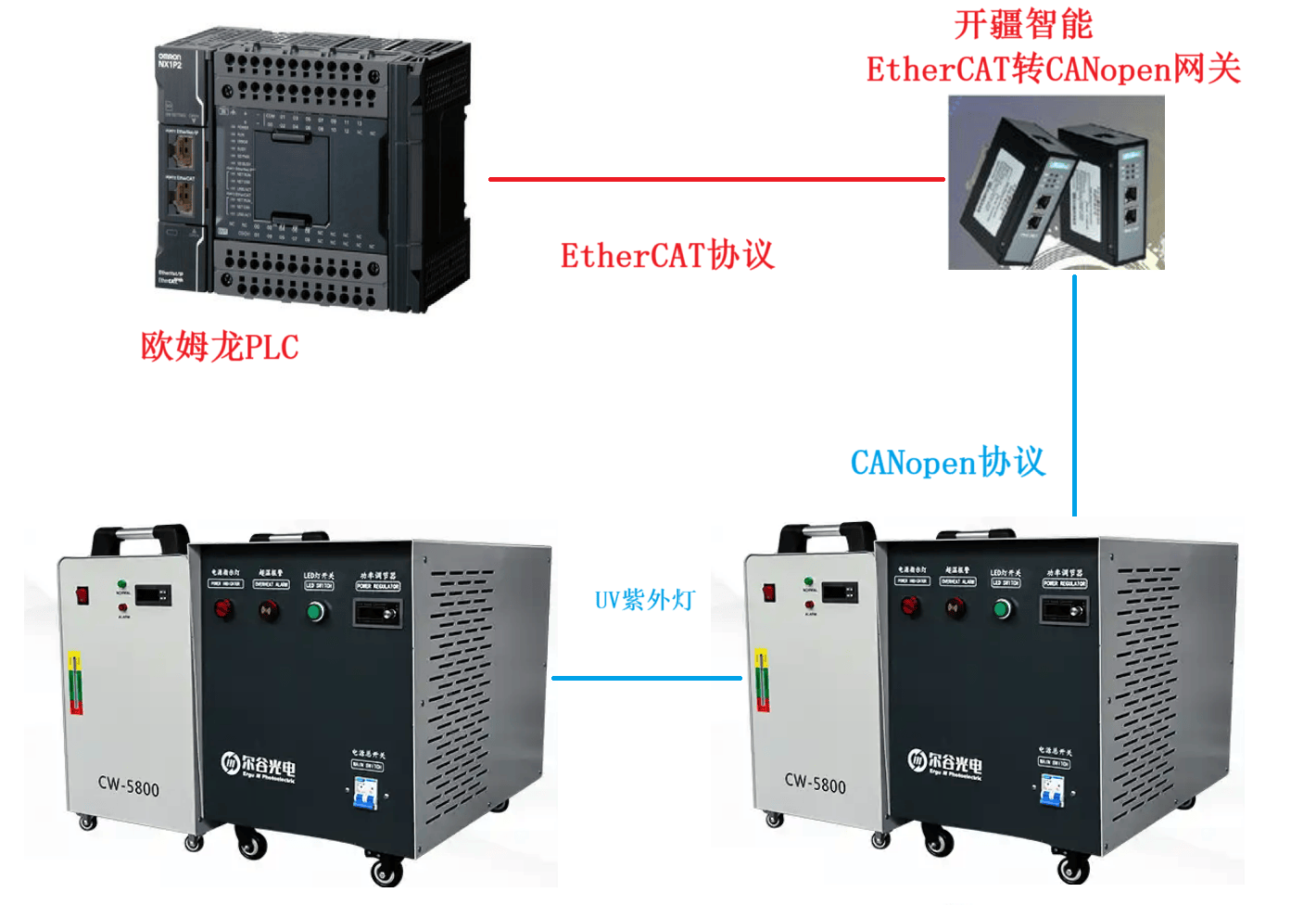
開疆智能EtherCAT轉CANopen網關連接UV燈配置案例
本案例是歐姆龍PLC通過開疆智能EtherCAT轉CANopen網關連接UV紫外燈的配置案例,紫
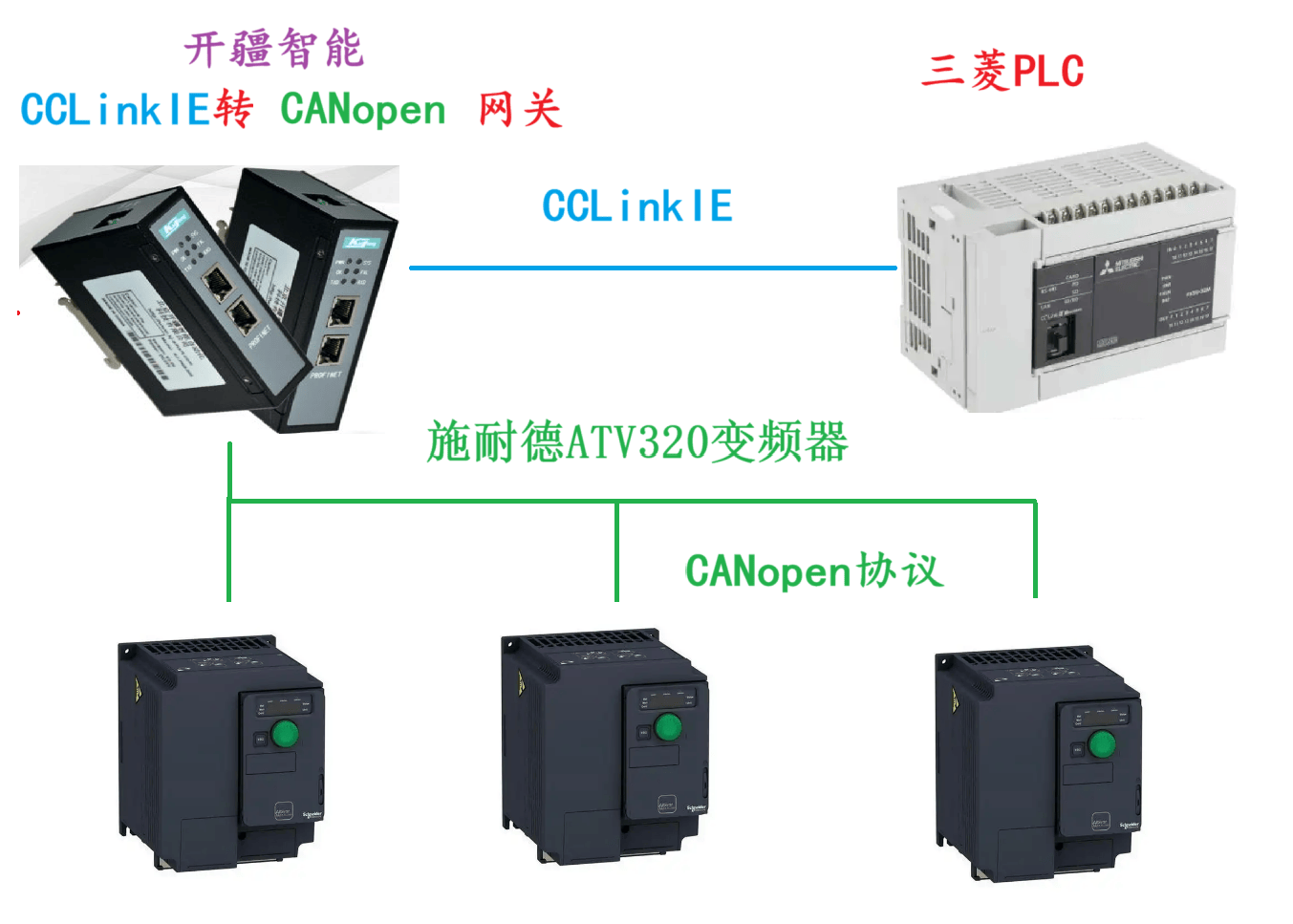
開疆智能CCLinkIE轉CANopen網關連接施耐德變頻器配置案例
本案例是通過開疆智能研發的CCLinkIE轉CANopen網關連接三菱PLC與施耐德ATV變頻器
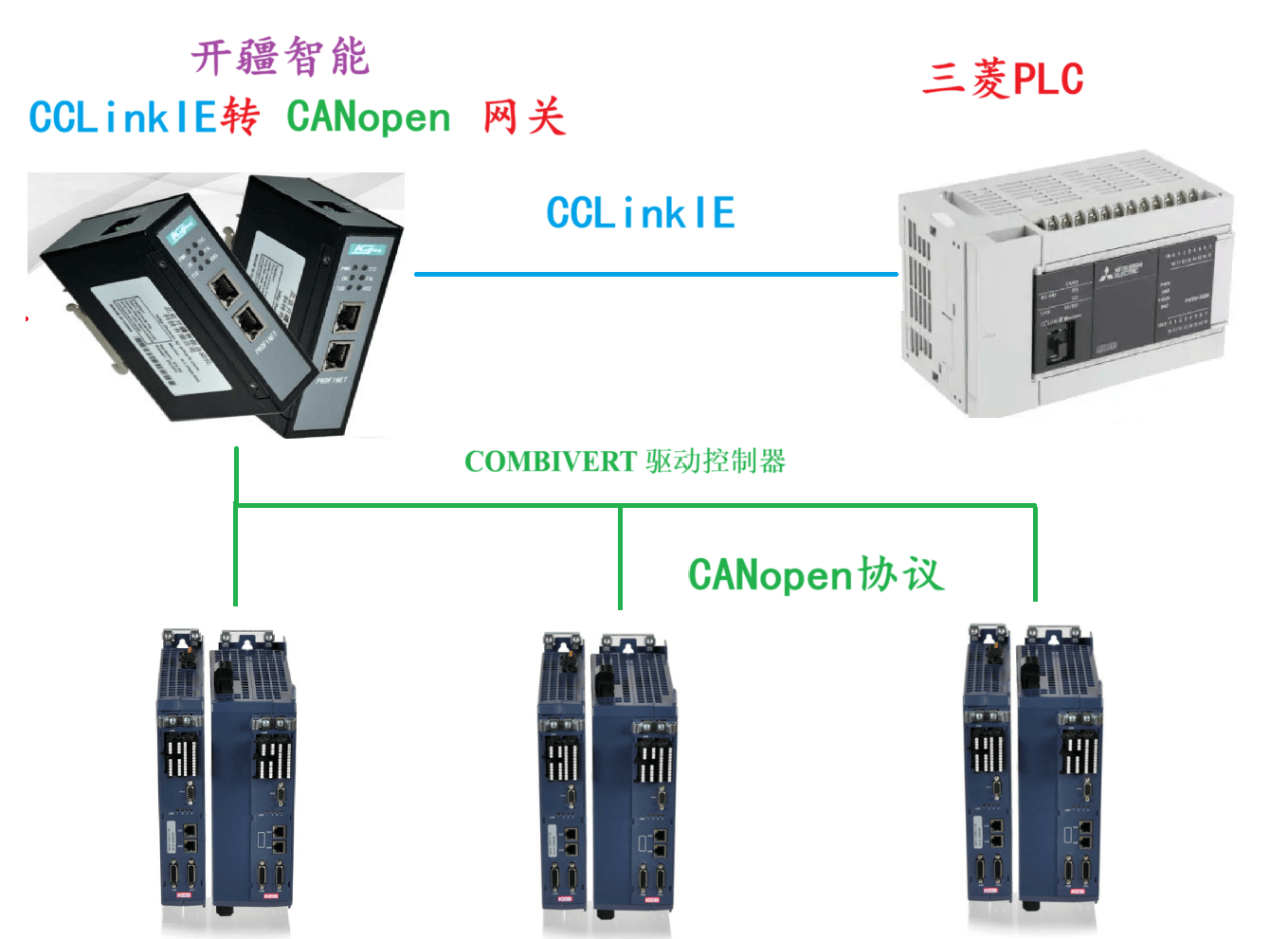
開疆智能CCLinkIE轉CANopen網關連接COMBIVERT驅動控制器配置案例
本案例是三菱PLC通過CCLinkIE轉CANopen網關控制COMBIVERT驅動控制器的配置案例。
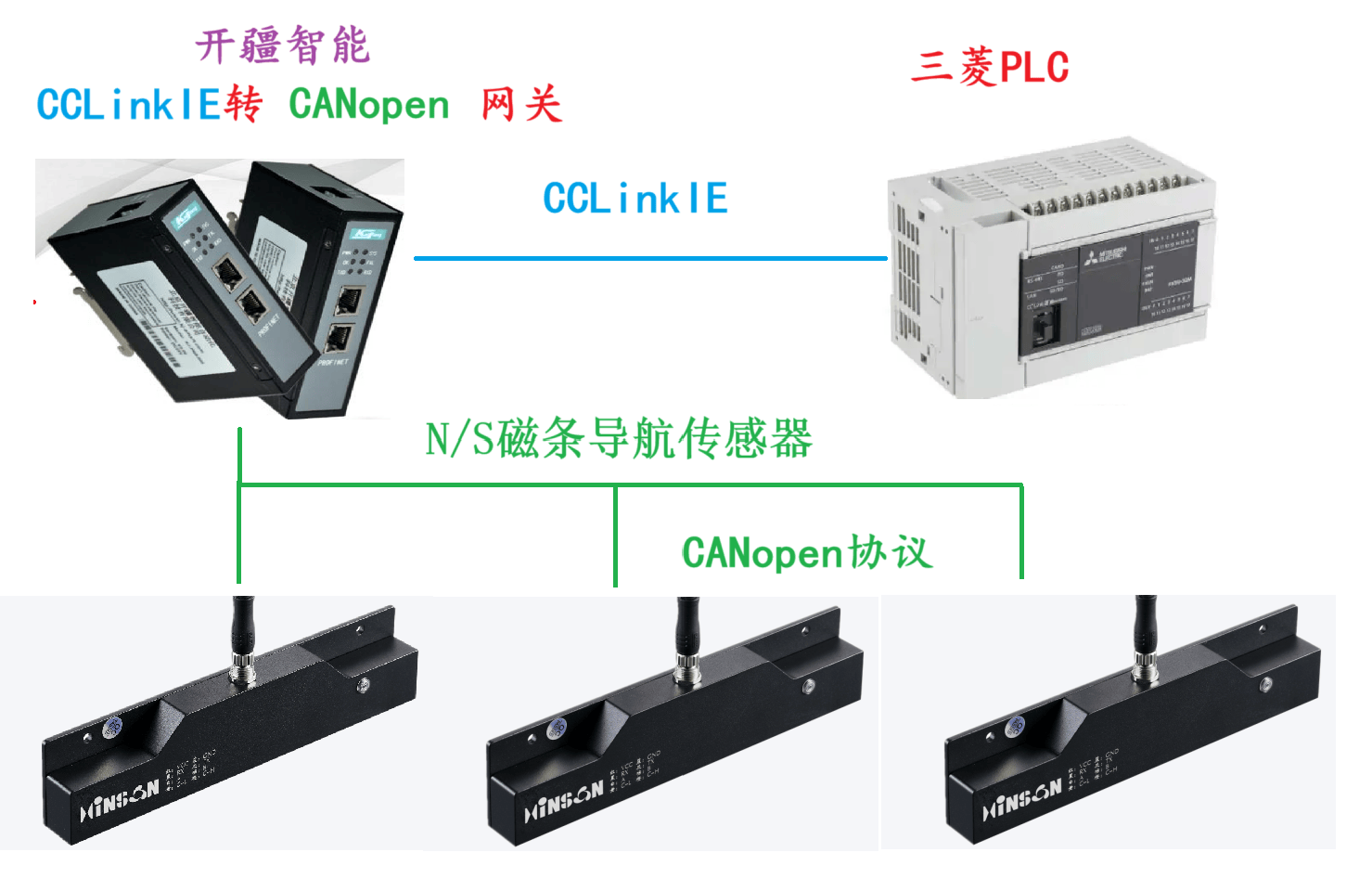
開疆智能CCLinkIE轉CANopen網關連接N/S磁條導航傳感器配置案例
本案例是國內的AGV廠家,需要將CANopen協議的磁道傳感器接入到三菱PLC中,由于PLC使用的是CCLinkIE協議,故選擇了開疆智能研發的CC
開疆智能CCLinkIE轉CANopen網關連接四宏電機驅動器配置案例
本案例是CCLinkIE主站通過CCLinkIE轉CANopen網關連接斯宏電機的配置案例
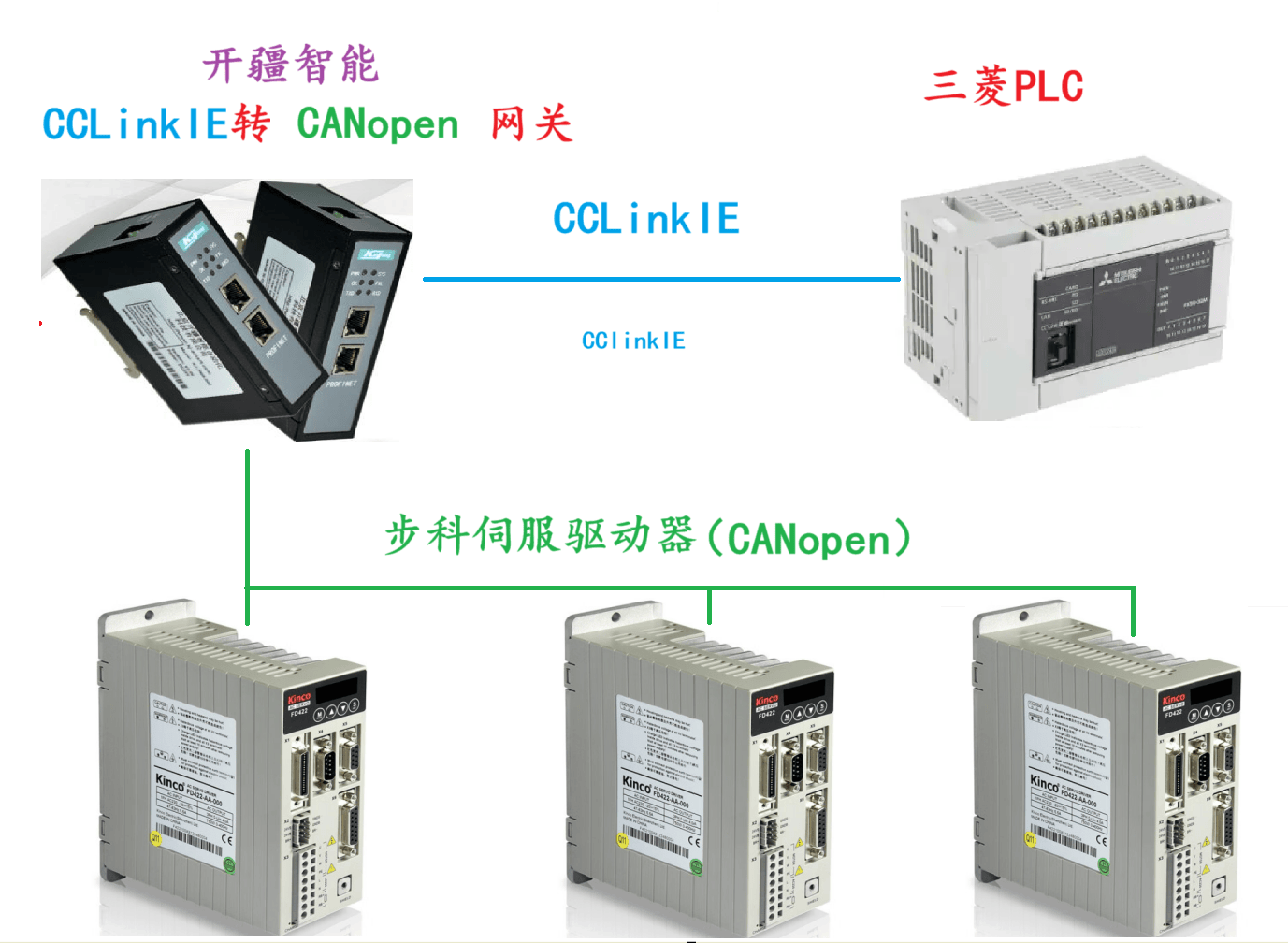
開疆智能CCLinkIE轉CANopen網關連接步科伺服驅動器配置案例
本案例是客戶的三菱PLC通過CCLinkIE轉CANopen網關連接步科伺服驅動器。具體配置步驟如下。 首先進行
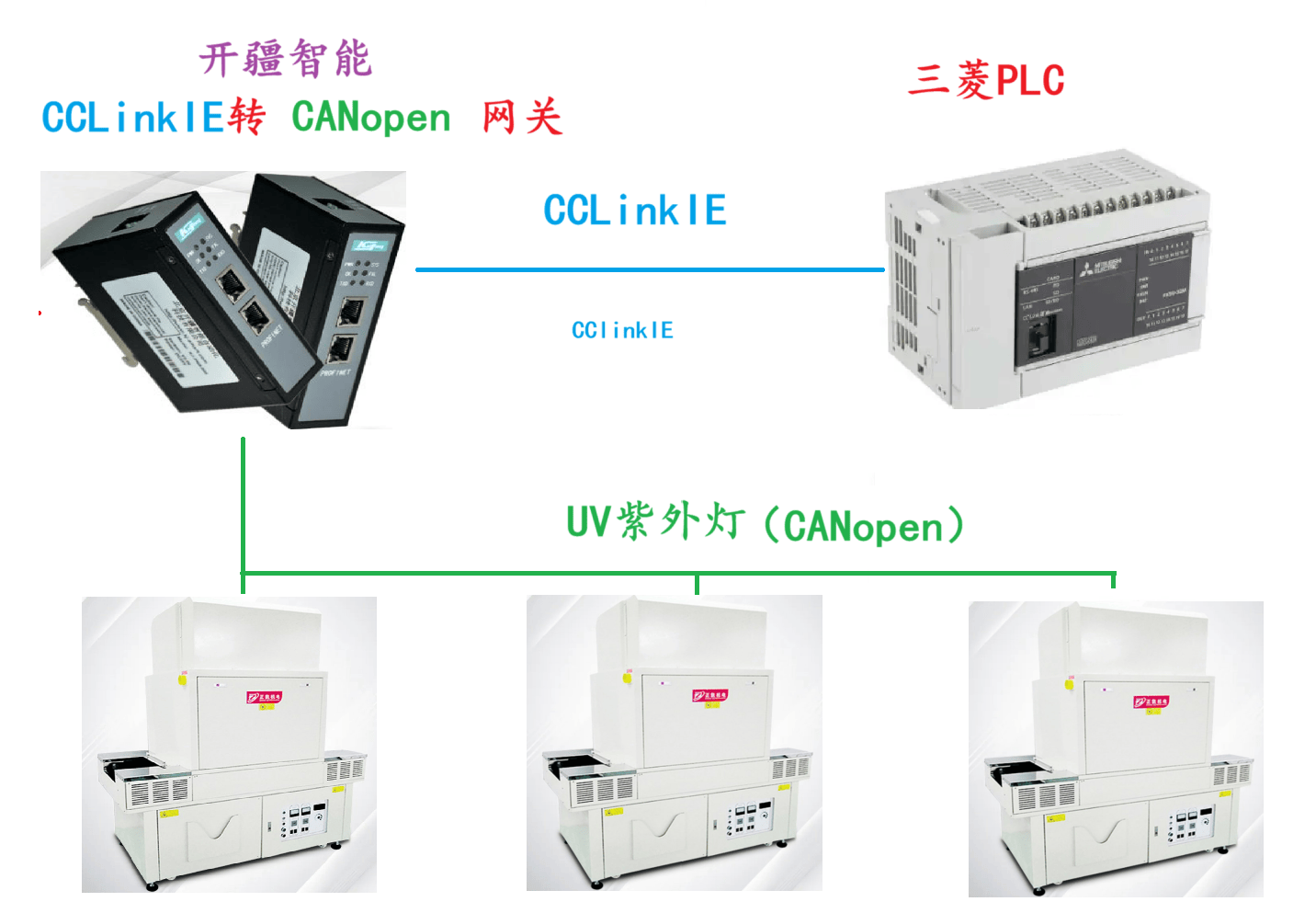
開疆智能CCLinkIE轉Canopen網關連接UV紫外燈配置案例
本案例是通過CCLinkIE轉CANopen網關連接三菱PLC與UV紫外燈的配置案例,具體過程如下。 配
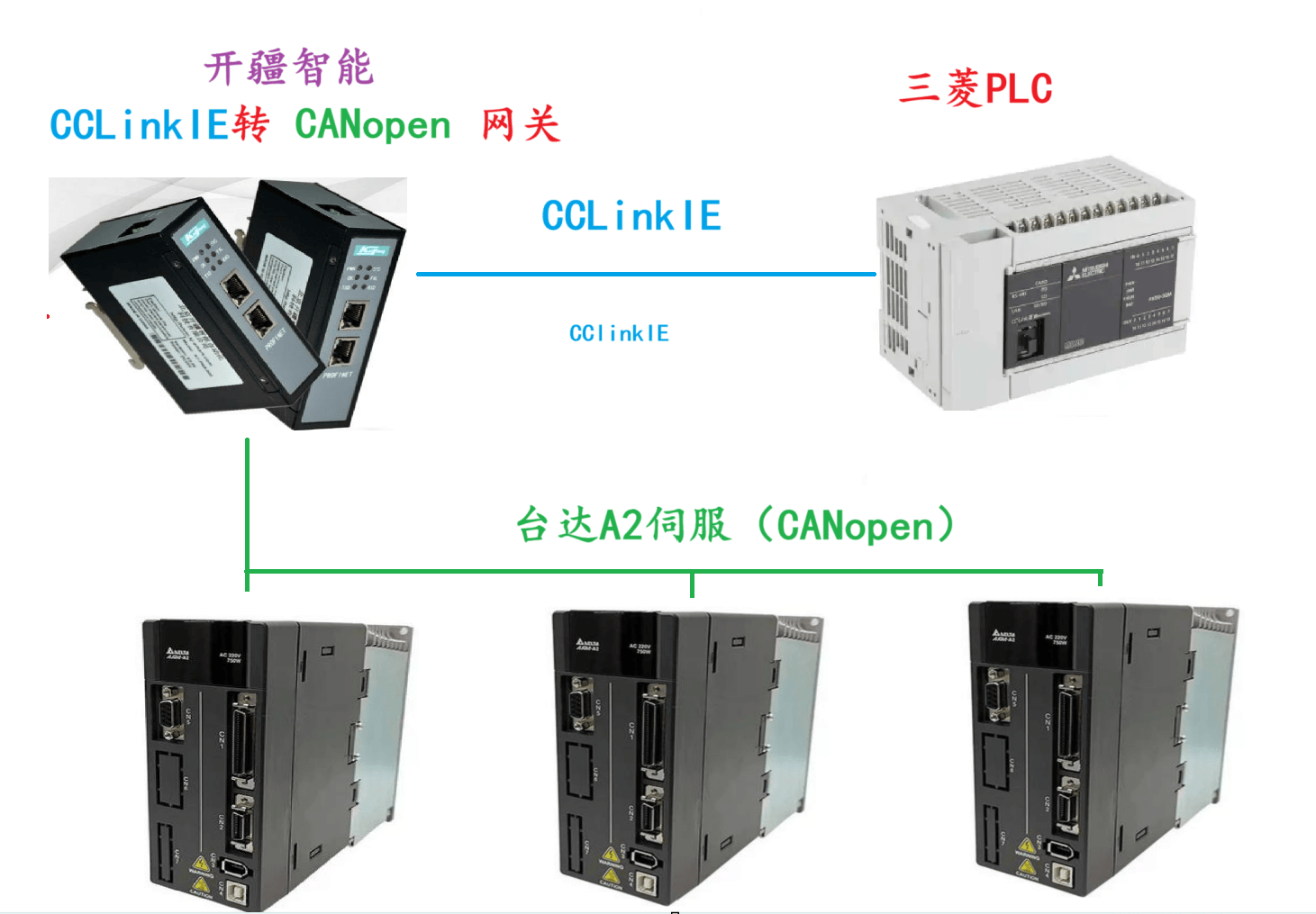
開疆智能CCLinkIE轉Canopen網關連接臺達伺服驅動器配置案例
本案例是通過CClinkIE轉Canopen網關連接臺達伺服驅動器的配置案例,網關兩側分別
開疆智能ModbusTCP轉Devicenet網關連接FANUC機器人配置案例
本案例是ModbusTCP主站通過開疆智能ModbusTCP轉Devicenet網關連接發那科機器人的配

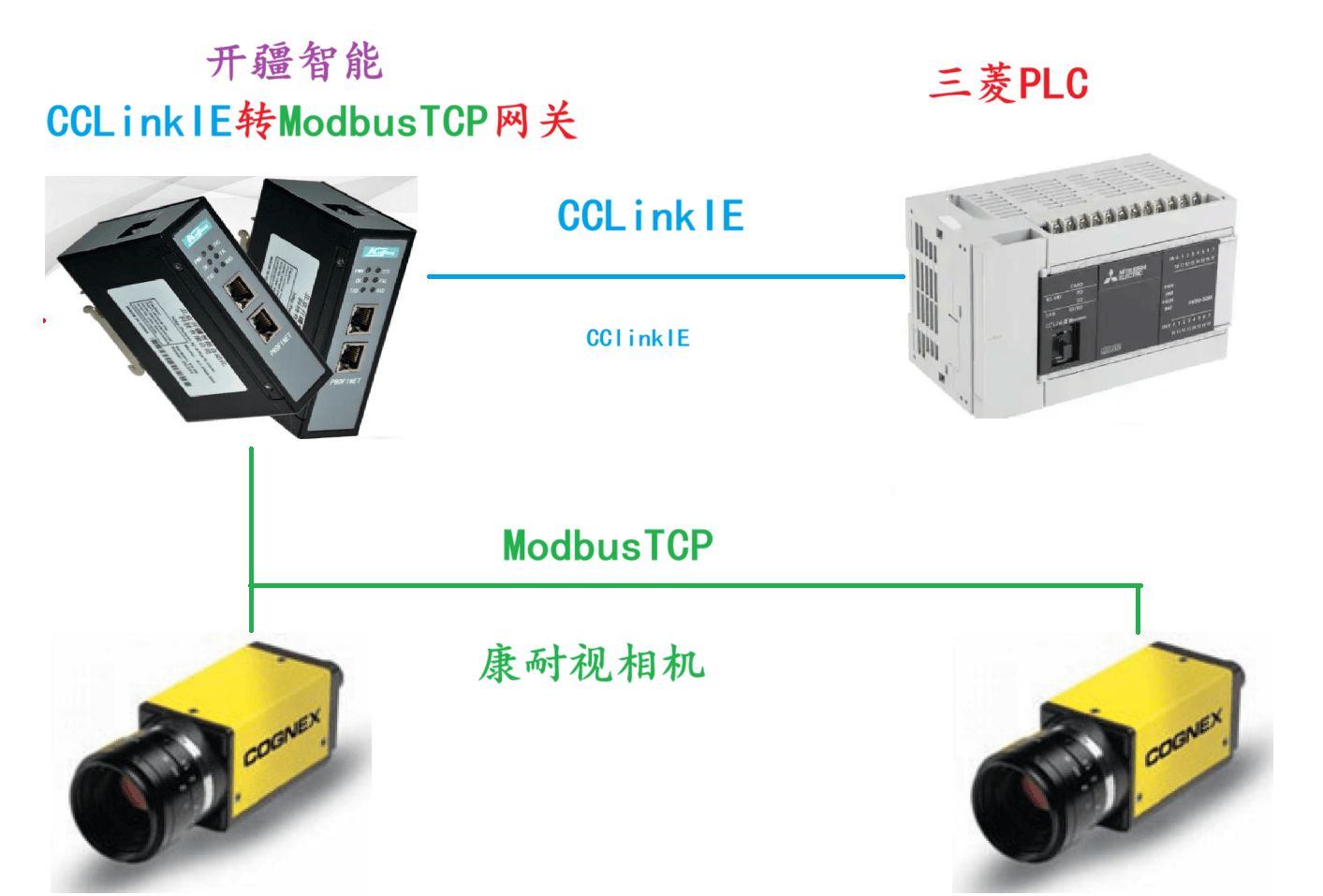
開疆智能CCLinkIE轉ModbusTCP網關連接康耐視InSight相機案例
開疆智能CCLinkIE轉ModbusTCP網關連接康耐視InSight相機案例
開疆智能CCLinkIE轉ModbusTCP網關連接傲博機器人配置案例
本案例是通過CClinkIE轉ModbusTCP網關,連接傲博機器人的配置案例。
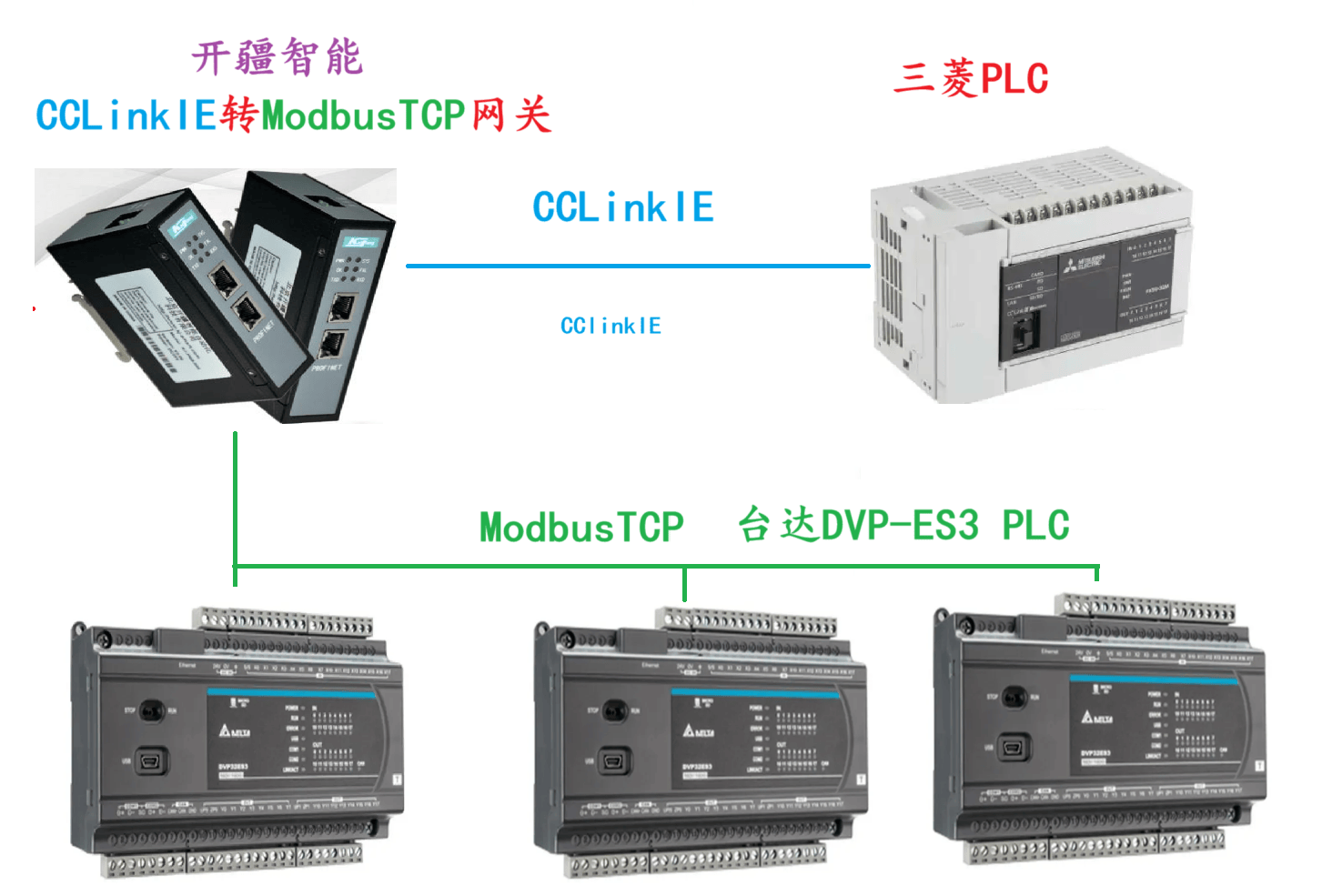
開疆智能ModbusTCP轉CClinkIE網關連接臺達DVP-ES3 PLC配置案例
本案例是通過開疆智能研發的ModbusTCP轉CClinkIE網關連接臺達DVP-ES3 PLC的配置
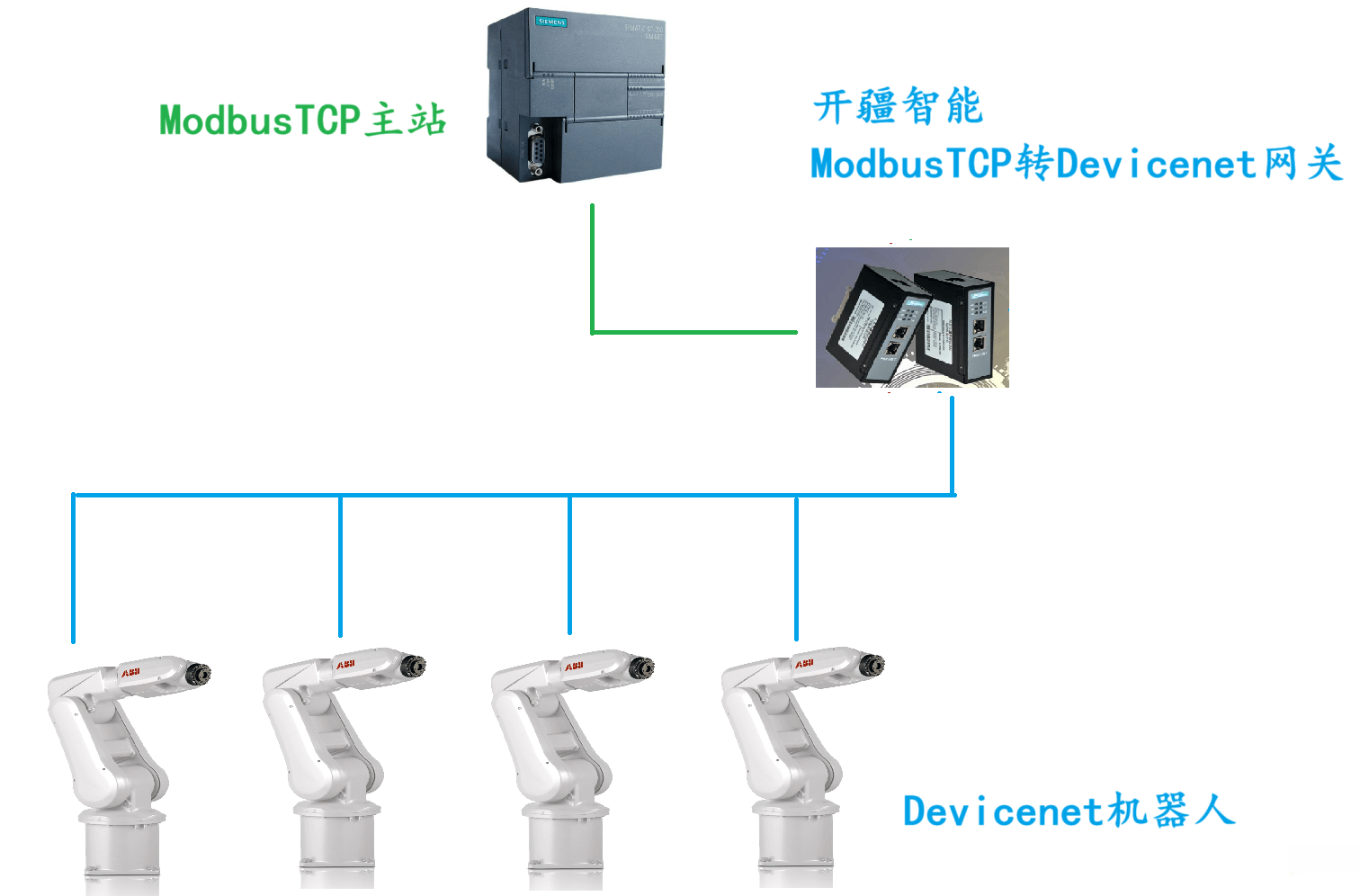
開疆智能ModbusTCP轉Devicenet網關連接三菱PLC與ABB機器人配置案例
本案例是三菱PLC通過開疆智能ModbusTCP轉Devicenet網關連接ABB機器人的配置案

開疆智能Canopen轉Profinet網關連接工博士GBS20機器人配置案例
本案例是介紹將支持canopen通信協議的機器人機器人接入到西門子Profinet網絡中,由于兩種協議不能直接通訊,故選擇了canopen轉Profinet



 工商網監
工商網監
評論