") 一段式端到端在自動駕駛中到底有何優(yōu)勢?
一段式端到端在自動駕駛中到底有何優(yōu)勢?

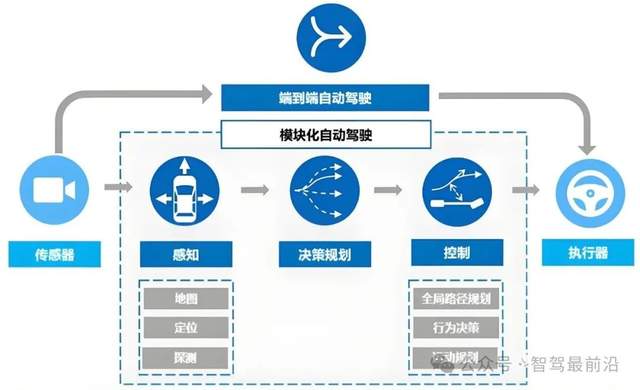
[首發(fā)于智駕最前沿微信公眾號]在自動駕駛技術(shù)的發(fā)展歷程中,模塊化架構(gòu)曾長期占據(jù)主導(dǎo)地位,從多傳感器數(shù)據(jù)采集,到特征提取與目標檢測,再到路徑規(guī)劃與軌跡優(yōu)化,最后落到車輛控制執(zhí)行,每一個環(huán)節(jié)都對應(yīng)一個獨立的子系統(tǒng)。隨著深度學(xué)習(xí)的崛起,“一段式端到端”(single-stage end-to-end)的方法應(yīng)運而生,它用一個統(tǒng)一的神經(jīng)網(wǎng)絡(luò)模型將原始傳感器輸入直接映射到車輛的控制指令。這種設(shè)計理念與傳統(tǒng)流水線式架構(gòu)相比,不僅在系統(tǒng)簡化和性能優(yōu)化方面展現(xiàn)出顯著優(yōu)勢,更是逐步改變自動駕駛技術(shù)的研發(fā)范式。那一段式端到端對于自動駕駛來說到底有何優(yōu)勢?

一段式端到端的組成及實現(xiàn)
一段式端到端模型通常由感知編碼器、環(huán)境理解模塊、決策預(yù)測層以及控制生成器四大部分構(gòu)成。感知編碼器負責(zé)提取原始傳感器數(shù)據(jù)(例如攝像頭圖像、點云或毫米波雷達回波)的多尺度特征,它可以采用卷積神經(jīng)網(wǎng)絡(luò)(CNN)或者更具表達力的視覺Transformer(ViT)結(jié)構(gòu)。環(huán)境理解模塊則通過時序建模(如時序卷積、循環(huán)神經(jīng)網(wǎng)絡(luò)或時序自注意力機制)整合連續(xù)幀信息,識別車輛周圍的動態(tài)物體、道路結(jié)構(gòu)以及交通信號。在此基礎(chǔ)上,決策預(yù)測層會生成針對如車輛加速減速趨勢、換道意圖或轉(zhuǎn)向方向等不同駕駛情景的意圖預(yù)測。控制生成器則將這些高層意圖映射為連續(xù)的轉(zhuǎn)向和油門—剎車控制信號。整個網(wǎng)絡(luò)從頭到尾聯(lián)動訓(xùn)練,損失函數(shù)通常包含“模仿學(xué)習(xí)”中的軌跡誤差(與人類駕駛員軌跡的均方誤差)、舒適度正則化(鼓勵平滑的加速和轉(zhuǎn)向)以及安全約束(例如與前車距離或道路邊界的最小安全距離)等。相比之下,模塊化架構(gòu)中,感知、定位、規(guī)劃、控制各自優(yōu)化各自的目標,而端到端網(wǎng)絡(luò)則將所有目標統(tǒng)一到一個綜合損失函數(shù)中,實現(xiàn)整體最優(yōu)。
訓(xùn)練策略對于一段式端到端系統(tǒng)至關(guān)重要。最常見的方法是聯(lián)合模仿學(xué)習(xí)與強化學(xué)習(xí)的混合訓(xùn)練。在純模仿學(xué)習(xí)階段,網(wǎng)絡(luò)通過海量人類駕駛數(shù)據(jù)進行監(jiān)督訓(xùn)練,讓模型學(xué)習(xí)“人類駕駛員在各種場景下如何操作方向盤和油門剎車”。由于純模仿學(xué)習(xí)無法覆蓋所有潛在的長尾場景,因此加入強化學(xué)習(xí)環(huán)節(jié)——在高保真模擬器中,網(wǎng)絡(luò)不斷與虛擬世界交互,根據(jù)安全性、效率、舒適度等設(shè)計好的獎勵函數(shù)進行策略迭代。強化學(xué)習(xí)可以讓模型探索邊緣場景下的最優(yōu)控制策略,并借此增強模型的魯棒性。此外,為了提升模型在新環(huán)境下的泛化能力,常會采用領(lǐng)域自適應(yīng)技術(shù)(domain adaptation),如基于對抗網(wǎng)絡(luò)的特征對齊或者自監(jiān)督重建任務(wù),使模擬器和真實世界的數(shù)據(jù)分布差距最小化。通過這樣聯(lián)合訓(xùn)練的方式,端到端系統(tǒng)能夠最大限度地利用各種來源的數(shù)據(jù),并在復(fù)雜多變的道路環(huán)境中保持穩(wěn)定的決策性能。

一段式端到端的優(yōu)勢
多模態(tài)傳感器融合是端到端架構(gòu)的一大亮點。在傳統(tǒng)方案中,不同傳感器數(shù)據(jù)往往分別由感知模塊處理,然后再通過復(fù)雜的策略融合各自輸出;而在一段式端到端模型中,所有傳感器原始數(shù)據(jù)可以被同步輸入到同一個深度網(wǎng)絡(luò)中,通過網(wǎng)絡(luò)內(nèi)部自動學(xué)習(xí)各模態(tài)的相對重要性和融合策略。如在感知編碼器的最初幾層,可以并行提取攝像頭圖像的空間紋理特征和點云的幾何信息,然后在更深層逐步融合。自注意力機制(Transformer Attention)在此發(fā)揮關(guān)鍵作用,它能夠根據(jù)上下文動態(tài)地調(diào)整各傳感器特征的權(quán)重分配,對光照不良或惡劣天氣環(huán)境下鏡頭受限的情況進行補償,使雷達或激光雷達提供的遠距探測補充視覺盲區(qū)。
實時推理與車規(guī)級硬件優(yōu)化也是端到端技術(shù)的一大優(yōu)勢所在。由于整個決策流程只需一次網(wǎng)絡(luò)前向傳播,即可生成連續(xù)的車輛控制指令,與傳統(tǒng)架構(gòu)中多次跨模塊數(shù)據(jù)傳遞和接口轉(zhuǎn)化相比,推理延遲大大降低。再結(jié)合模型壓縮與加速技術(shù),例如剪枝(pruning)、量化(quantization)以及張量融合(operator fusion)等,可以將網(wǎng)絡(luò)規(guī)模縮減至適合車載AI芯片(如NVIDIA DRIVE Orin、Tesla FSD Computer、Mobileye EyeQ)運算資源的程度。端到端網(wǎng)絡(luò)通常采用如深度可分離卷積(Depthwise Separable Convolution)或線性注意力機制等輕量化設(shè)計,以進一步降低計算和內(nèi)存消耗。在應(yīng)用中,經(jīng)過離線訓(xùn)練和部署優(yōu)化的端到端模型能在車規(guī)級NPU上實現(xiàn)單幀推理時間低于20毫秒,滿足50Hz以上的控制回路頻率需求,確保車輛在高速行駛或緊急轉(zhuǎn)向時的及時響應(yīng)。
從系統(tǒng)安全性與可解釋性的角度來看,端到端模型面臨更多挑戰(zhàn),但也有獨特的應(yīng)對策略。由于黑盒特性,一旦出現(xiàn)異常行為,定位問題的難度會增大。為此,有技術(shù)提出了多種可解釋性技術(shù),例如通過梯度加權(quán)類激活映射(Grad-CAM)或輸入敏感性分析,來可視化網(wǎng)絡(luò)在做出某個決策時關(guān)注的圖像區(qū)域;再結(jié)合模型不確定性估計(如蒙特卡洛Dropout或深度高斯過程),量化輸出控制指令的置信度;此外,還可以在決策過程中引入安全保障層(safety envelope):在網(wǎng)絡(luò)輸出與車輛實際系統(tǒng)之間,加設(shè)一個獨立運行的規(guī)則檢查模塊,當(dāng)網(wǎng)絡(luò)輸出的控制超出安全邊界時,即刻進行限界或急停處置。通過這些技術(shù)綜合運用,端到端系統(tǒng)既能發(fā)揮大模型的優(yōu)勢,又能最大程度地保證行車安全。
端到端系統(tǒng)的仿真驗證與測試流程也與傳統(tǒng)架構(gòu)不同。傳統(tǒng)架構(gòu)下,測試團隊需要針對每個模塊設(shè)計獨立的單元測試、集成測試和系統(tǒng)測試;而端到端模型則需要圍繞“輸入—輸出閉環(huán)”整體進行驗證。如在高保真模擬平臺中,可以并行化運行上千條虛擬道路場景,通過分布式訓(xùn)練集群進行大規(guī)模自動化測試,讓模型在各種氣象、光照、交通密度下進行重復(fù)演練,并收集關(guān)鍵性能指標(KPIs)如碰撞率、紅燈闖越率、軌跡偏差等。在真實道路測試中,端到端模型還支持在線學(xué)習(xí)與安全策略微調(diào),當(dāng)實車測試中發(fā)現(xiàn)偏離人類駕駛員行為的異常模式,可以將這一小部分場景數(shù)據(jù)回傳到訓(xùn)練平臺,進行針對性再訓(xùn)練或在線微調(diào),迅速修復(fù)問題。這種閉環(huán)的仿真—道路—仿真循環(huán),大大縮短了從算法迭代到量產(chǎn)落地的周期。
從研發(fā)協(xié)同與迭代效率來看,端到端模式也大幅簡化了團隊協(xié)作。在傳統(tǒng)流水線式項目中,感知、定位、規(guī)劃、控制等團隊需要對接繁復(fù)的接口文檔,耗費大量時間進行版本兼容和聯(lián)調(diào);而在端到端項目中,研發(fā)團隊只需專注于一個統(tǒng)一的模型接口,即輸入原始傳感器數(shù)據(jù),輸出車輛底層控制信號,所有中間功能都隱含在網(wǎng)絡(luò)內(nèi)部。版本管理也因此更為集中,只要模型結(jié)構(gòu)或訓(xùn)練流程發(fā)生變化,就更新一份模型和相關(guān)訓(xùn)練腳本即可。隨著模型庫化和AutoML技術(shù)的引入,團隊還可以通過超參數(shù)搜索或網(wǎng)絡(luò)架構(gòu)搜索(NAS)等手段,自動化地探索最優(yōu)模型配置,進一步提升端到端項目的研發(fā)效率。
在數(shù)據(jù)管理與標注成本方面,端到端方法同樣具有優(yōu)勢。傳統(tǒng)方案往往需要為感知模塊準備大規(guī)模圖像分割、物體檢測標注,為定位模塊準備高清地圖和標定數(shù)據(jù),為規(guī)劃模塊準備道路拓撲與交通規(guī)則,這些多樣化標注體系不僅成本高昂,還容易導(dǎo)致不同數(shù)據(jù)集風(fēng)格不一致。端到端系統(tǒng)只需采集“端到端行為”標注,即車輛在給定傳感器輸入序列下應(yīng)執(zhí)行的參考控制指令。雖然這種標注同樣要求高質(zhì)量,但它可以通過使用車輛已有的自動記錄系統(tǒng)(如車載CAN總線數(shù)據(jù))自動采集,大幅降低人工標注成本。同時,隨著自監(jiān)督和弱監(jiān)督學(xué)習(xí)技術(shù)的發(fā)展,越來越多研究嘗試利用無標簽數(shù)據(jù)進行預(yù)訓(xùn)練,或者通過對比學(xué)習(xí)(contrastive learning)增強模型的特征理解能力,進一步減少對大規(guī)模人工標注數(shù)據(jù)的依賴。
未來,一段式端到端架構(gòu)將與更多前沿技術(shù)深度融合。在多智能體協(xié)同駕駛場景下,端到端模型可以擴展為多agent輸入—輸出架構(gòu),通過圖神經(jīng)網(wǎng)絡(luò)(GNN)動態(tài)建模周邊車輛意圖,生成更為協(xié)調(diào)的集體駕駛策略;此外,隨著5G與蜂窩車聯(lián)網(wǎng)(C-V2X)的普及,端到端模型將能夠?qū)⒌缆坊A(chǔ)設(shè)施(如信號燈數(shù)據(jù)、路側(cè)單元信息)與車載傳感器數(shù)據(jù)一并輸入網(wǎng)絡(luò),實現(xiàn)端—邊—云協(xié)同智能;聯(lián)邦學(xué)習(xí)(federated learning)技術(shù)的引入,也將使不同廠商或車隊的端到端模型在保護數(shù)據(jù)隱私的前提下,共享道路學(xué)習(xí)成果,加速整個行業(yè)的智能駕駛進步。

最后的話
一段式端到端技術(shù)通過統(tǒng)一的網(wǎng)絡(luò)架構(gòu)、整體級的損失優(yōu)化、多模態(tài)自適應(yīng)融合、低延遲實時推理、安全可解釋保障以及高效的仿真—測試閉環(huán),實現(xiàn)了從感知到控制的全流程創(chuàng)新。它不僅在系統(tǒng)性能、魯棒性和維護成本上優(yōu)于傳統(tǒng)模塊化方案,而且為自動駕駛研發(fā)流程帶來革命性變革。隨著大規(guī)模訓(xùn)練算力的普及、自動化標注與自監(jiān)督技術(shù)的成熟,以及更完善的安全與可解釋性框架的建立,端到端技術(shù)必將在自動駕駛的商業(yè)化落地中扮演核心角色,為實現(xiàn)真正安全、智能、持續(xù)演進的無人駕駛奠定堅實基礎(chǔ)。
審核編輯 黃宇
-
自動駕駛
+關(guān)注
關(guān)注
794文章
14926瀏覽量
180551
發(fā)布評論請先 登錄
為什么一段式端到端自動駕駛很難落地?

自動駕駛端到端為什么會出現(xiàn)黑盒現(xiàn)象?

自動駕駛中毫米波雷達到底有何作用?

如何訓(xùn)練好自動駕駛端到端模型?

自動駕駛中端到端仿真與基于規(guī)則的仿真有什么區(qū)別?
自動駕駛中“一段式端到端”和“二段式端到端”有什么區(qū)別?

西井科技端到端自動駕駛模型獲得國際認可
端到端自動駕駛相較傳統(tǒng)自動駕駛到底有何提升?

博世一段式端到端方案打造智能輔助駕駛體驗
Nullmax端到端自動駕駛最新研究成果入選ICCV 2025

為什么自動駕駛端到端大模型有黑盒特性?

端到端數(shù)據(jù)標注方案在自動駕駛領(lǐng)域的應(yīng)用優(yōu)勢
一文帶你厘清自動駕駛端到端架構(gòu)差異

自動駕駛中基于規(guī)則的決策和端到端大模型有何區(qū)別?




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論