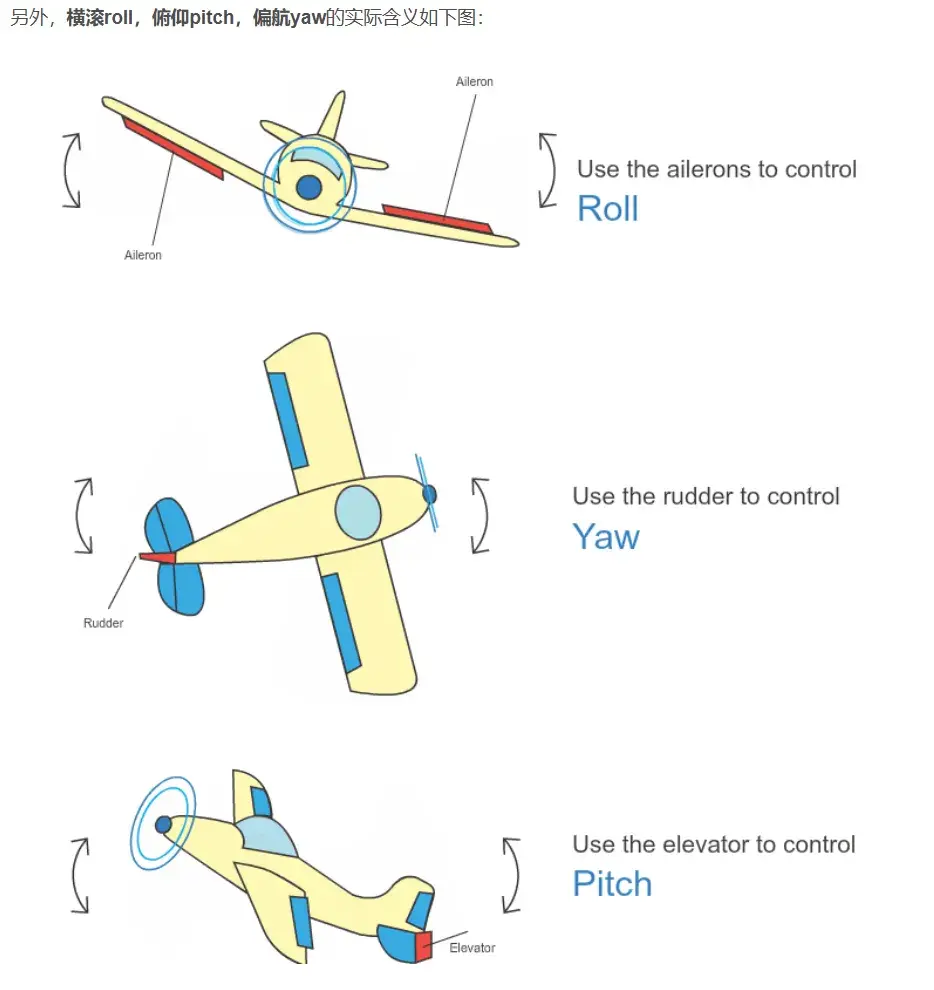
 mpu6050航向角漂移很嚴重的原因及解決方法
mpu6050航向角漂移很嚴重的原因及解決方法

給大家簡單分析一下MPU6050 航向角漂移嚴重的原因及解決方法
MPU6050 航向角漂移嚴重的原因分析
- 傳感器自身特性
- 陀螺儀漂移 :陀螺儀測量角速度,通過積分得到角度,但積分過程中,即使角速度為零,由于陀螺儀的噪聲、溫度變化等因素,也會產生微小的角速度輸出,積分后導致角度漂移。
- 加速度計誤差 :加速度計可輔助測量角度,但受振動、重力加速度變化等影響,輸出存在誤差。當用加速度計數據修正航向角時,這些誤差會間接導致航向角漂移。
- 外部環境因素
- 系統設計與算法問題
- 采樣頻率低 :若采樣頻率過低,在兩次采樣間隔內,傳感器可能已經發生了較大的角度變化,導致積分計算時丟失部分角度信息,累積起來造成明顯的航向角漂移。
- 濾波算法不佳 :如果濾波算法選擇不當或參數設置不合理,無法有效濾除傳感器噪聲和干擾信號,會使測量數據波動較大,表現為航向角漂移。
- 未校準或校準不當 :MPU6050 在使用前需要進行校準,以消除傳感器的零偏、比例因子誤差等。未進行校準或校準不準確,會使測量的初始值就存在偏差,隨著時間推移,漂移現象會越來越嚴重。
MPU6050 航向角漂移嚴重的解決方法
- 硬件方面
- 溫度補償 :可增加溫度傳感器,實時監測環境溫度,根據溫度與航向角漂移的關系,在軟件中進行溫度補償計算。
- 電磁屏蔽 :將 MPU6050 模塊用金屬屏蔽罩進行屏蔽,并良好接地,減少外部電磁干擾。同時,合理布線,避免傳感器的信號線與強電線路平行敷設。
- 減震措施 :使用減震材料,如橡膠墊、海綿等,將 MPU6050 與設備的安裝部位隔開,減少振動傳遞。
- 軟件方面
- 提高采樣頻率 :在硬件資源允許的情況下,適當提高 MPU6050 的采樣頻率,使積分計算更精確,減少角度信息的丟失。
- 優化濾波算法 :采用卡爾曼濾波、互補濾波等先進的濾波算法,根據具體應用場景,合理調整濾波參數,有效濾除噪聲和干擾信號。
- 校準與標定 :在使用前對 MPU6050 進行嚴格的校準,包括零偏校準、比例因子校準等。還可以定期進行校準,以適應環境和設備狀態的變化。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
陀螺儀
+關注
關注
44文章
894瀏覽量
101903 -
MPU6050
+關注
關注
39文章
313瀏覽量
76863 -
航向角誤差補償
+關注
關注
0文章
2瀏覽量
2994
發布評論請先 登錄
相關推薦
熱點推薦
CW32L012讀取MPU6050姿態數據
隨著物聯網、可穿戴設備、工業傾角檢測等場景的普及,低成本、低功耗的姿態檢測方案成為嵌入式領域的研究熱點。MPU6050 作為集成三軸加速度計和三軸陀螺儀的六軸傳感器,憑借低成本、小體積的優勢被

用dma加iic讀取mpu6050數據遇到的疑問求解
我在用dma加iic讀取mpu6050數據時,試著用dma傳輸4個數,但是用freemaster查看數據以后,發現只有數組里面的第一個數有值,其他的都為0,而且發現沒進dma傳輸完成中斷,把傳輸數量改成1以后,就能進入dma傳輸完成中斷,就好像dma只能傳輸一個數一樣,有沒有大佬知道這是怎么回事啊
發表于 12-09 07:41
MTI-300航向角不穩定或不正確的原因
參考的航向角(Yaw或Heading)。默認情況下,方向輸出在東-北-天(East-North-Up,ENU)坐標系中,這意味著當MTi的x軸與東對齊、y軸與北對

TT電機,Arduino Uno,L298N 5AD ,MPU6050最簡自平衡機器人資料
;MPU6050_6Axis_MotionApps20.h\" //https://github.com/jrowberg/i2cdevlib/tree/master/Arduino/MPU6050
MPU6050
發表于 10-06 13:12
【RA4M2-SENSOR】串口傳輸MPU6050陀螺儀數據測評
RA4M2串口傳輸MPU6050陀螺儀數據測評
1. 套件概述
RA4M2-SENSOR 是一款基于 RA4M2 系列微控制器的評估套件,支持 TrustZone 技
術和片內安全加密引擎(SCE
發表于 09-14 11:41
為什么它的雙天線基線設計,成了航向精度關鍵?
在組合導航領域,航向角精度是設備的生死線,無論是低空無人機航拍的影像拼接,還是測繪工程的方向基準校準,一絲航向誤差都可能導致最終成果偏離規范要求。同為MEMS組合導航方案,為何部分產品航向
STM32+DP83848跑10M可以,100M丟包很嚴重,請問有人遇到過嗎?
大佬們,stm32驅動dp83848,跑10M可以,100M丟包很嚴重,請問有人遇到過嗎
發表于 08-20 10:04
小安派BW21-CBV-Kit入門教程之DMP6讀取MPU6050數據
本示例將演示使用 DMP6 從 MPU6050 獲取數據。MPU6050 配備了數字運動處理器 (DMP),用于處理運動算法的計算,如轉換為三軸偏航/俯仰/滾動平面、轉換為四元數或轉換為歐拉角。
求助,關于ST的IMU和地磁計用motionfx庫融合后航向角異常的問題求解
傳感器IMU是LSM6DSL型號,磁強計是LIS3MDL型號,使用motionfx庫進行姿態解算,遇到航向角不準確的問題。我查看地磁計的值是正常的,但是航向角不正常:例如傳感器指向正北
發表于 06-10 07:19
電機常見故障分析及解決方法
電機在運行過程中可能會出現多種故障,以下是一些常見故障的分析及解決方法: 一、機械故障 1. 軸承損壞或磨損 ? ?● 故障表現:電機運轉不平穩,產生異響,嚴重時甚至停轉。 ? ?● 原因分析:通常

ST的IMU和地磁計用motionfx庫融合后航向角異常的原因?
傳感器IMU是LSM6DSL型號,磁強計是LIS3MDL型號,使用motionfx庫進行姿態解算,遇到航向角不準確的問題。我查看地磁計的值是正常的,但是航向角不正常:例如傳感器指向正北
發表于 04-23 08:11
變頻器低電壓跳閘原因及解決方法和案例分析
,還可能對設備造成損害。因此,深入探討變頻器低電壓跳閘的原因及解決方法,對于提高生產效率和保障設備安全具有重要意義。 一、變頻器低電壓跳閘的原因分析 變頻器低電壓跳閘的原因多種多樣,主




 工商網監
工商網監
評論