") CW32L012解算MPU6050姿態(tài)數(shù)據(jù)
CW32L012解算MPU6050姿態(tài)數(shù)據(jù)

姿態(tài)解算
我們僅僅獲取了MPU6050的三軸加速度和角速度,要想得到姿態(tài)角,需要利用讀取的數(shù)據(jù)進行姿態(tài)解算。
一、歐拉角
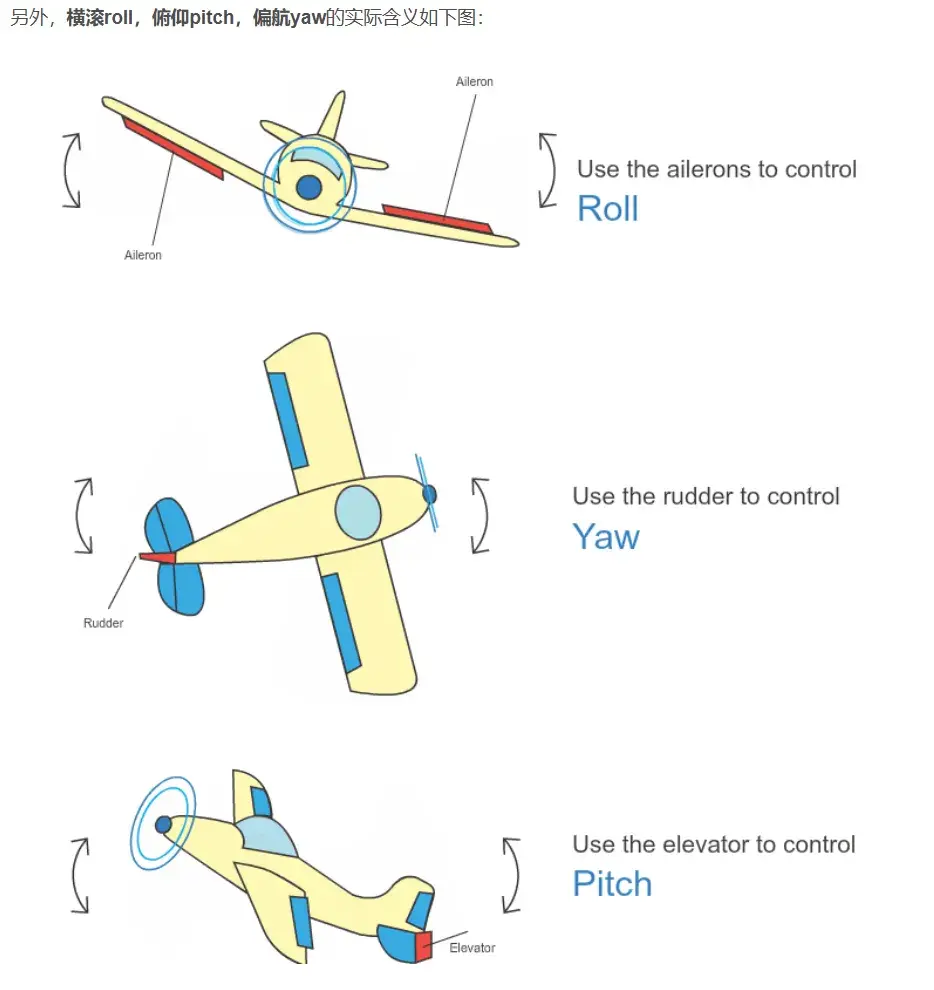
歐拉角是一種用于描述三維剛體相對參考坐標系(通常為水平面的直角坐標系)姿態(tài)的參數(shù),通過依次繞三個互相垂直的坐標軸(對應姿態(tài)檢測中常用的翻滾角 Roll、俯仰角 Pitch、偏航角 Yaw,分別繞 X、Y、Z 軸旋轉(zhuǎn))的旋轉(zhuǎn)角度來表征設備的傾斜、轉(zhuǎn)向狀態(tài)。
如下圖所示:
橫滾角(Roll):繞運動坐標系的Y軸旋轉(zhuǎn)
偏航角(Yaw):繞運動坐標系的Z軸旋轉(zhuǎn)
俯仰角(Roll):繞運動坐標系的X軸旋轉(zhuǎn)
二、姿態(tài)解算
2.1利用加速度計解算姿態(tài)(僅能解算Roll和Pitch)
歐拉角與旋轉(zhuǎn)矩陣來對陀螺儀與加速度計的原始數(shù)據(jù)進行姿態(tài)求解,并將兩種姿態(tài)進行互補融合,最終得到IMU的實時姿態(tài)。
2.1.1位姿矩陣:
位姿矩陣是用于在三維笛卡爾參考坐標系中,統(tǒng)一描述剛體的位置(平移狀態(tài))與姿態(tài) 的 4×4 階齊次變換矩陣,其前 3×3 的子矩陣為旋轉(zhuǎn)矩陣,對應由歐拉角等姿態(tài)參數(shù)轉(zhuǎn)換而來的剛體旋轉(zhuǎn)信息,用來表征設備相對參考坐標系的傾斜、轉(zhuǎn)向姿態(tài)(即 MPU6050 檢測的 Roll、Pitch、Yaw 對應的姿態(tài)狀態(tài)),矩陣最后一列的前 3 個元素為平移向量,用來表征設備在參考坐標系中的三維位置坐標,最后一行固定為 [0,0,0,1] 以滿足齊次坐標的運算規(guī)范,它可以將剛體的旋轉(zhuǎn)與平移變換整合為一次矩陣運算,在嵌入式姿態(tài)檢測與空間定位的場景中,能簡化不同坐標系間的姿態(tài)、位置轉(zhuǎn)換計算,常作為姿態(tài)解算、多傳感器融合的基礎數(shù)學工具。
當加速度計水平放置,即Z軸豎直向上時,Z軸可以讀到1g的數(shù)值(g為重力加速度),X軸和Y軸兩個方向讀到0,初始位姿可以記作:
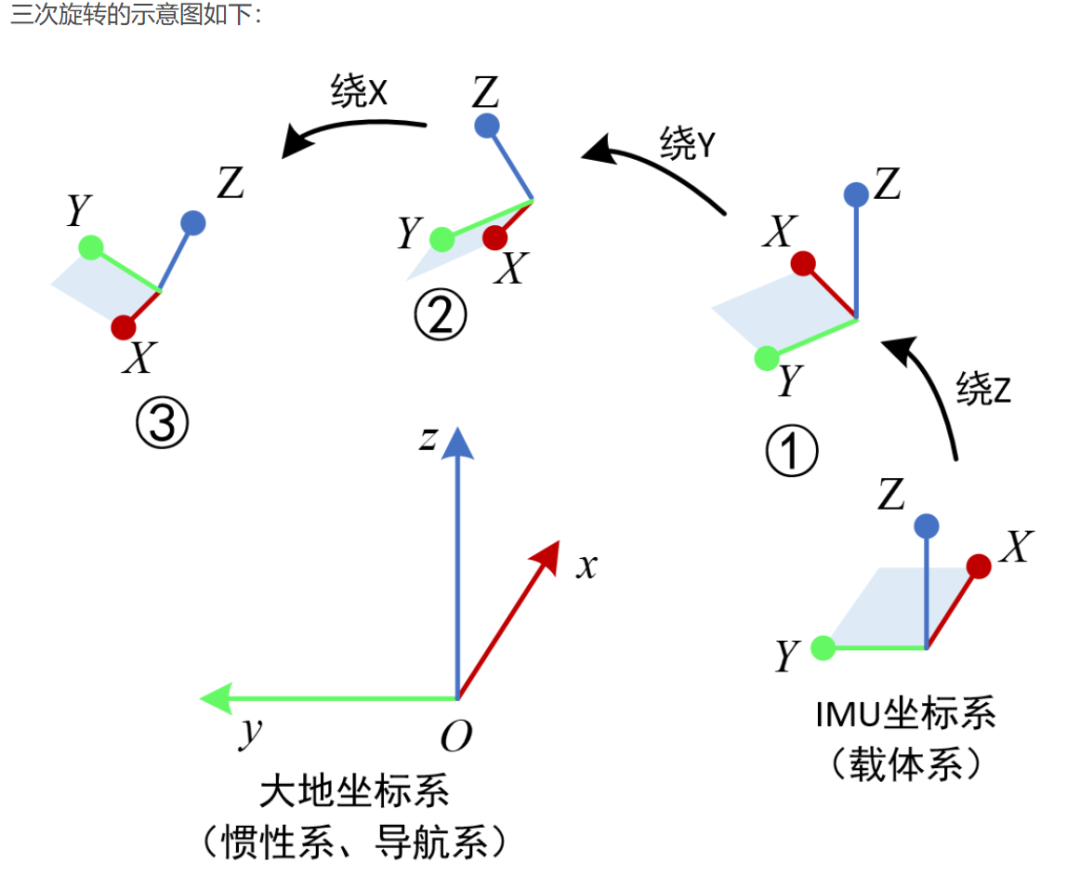
本篇的姿態(tài)解算選用的旋轉(zhuǎn)順序為ZYX,即IMU坐標系初始時刻與大地坐標系重合,然后依次繞自己的Z、Y、X軸進行旋轉(zhuǎn),這里先自定義一下每次的旋轉(zhuǎn)名稱和符號:
繞IMU的Z軸旋轉(zhuǎn):航向角yaw, 轉(zhuǎn)動y角度
繞IMU的Y軸旋轉(zhuǎn):俯仰角pitch,轉(zhuǎn)動p角度
繞IMU的X軸旋轉(zhuǎn):橫滾角row, 轉(zhuǎn)動r角度
當IMU繞Z軸旋轉(zhuǎn)y度,再繞Y軸旋轉(zhuǎn)P度,再繞X軸旋轉(zhuǎn)r度,其終止位姿可以表示為:

根據(jù)機器人運動學:對于一個傳感器的末端姿態(tài),我們可以將其看作分別繞z、y,x軸旋轉(zhuǎn)得到,其中正向運動學的繞各軸的旋轉(zhuǎn)矩陣如下:

現(xiàn)在我們已知了初始位姿,終止位姿、繞三軸的旋轉(zhuǎn)矩陣,對其進行機器人逆運動學的求解,可求得繞三個軸的旋轉(zhuǎn)角度:
因為MPU6050是繞運動坐標系旋轉(zhuǎn),所以對應的矩陣變換是左乘:
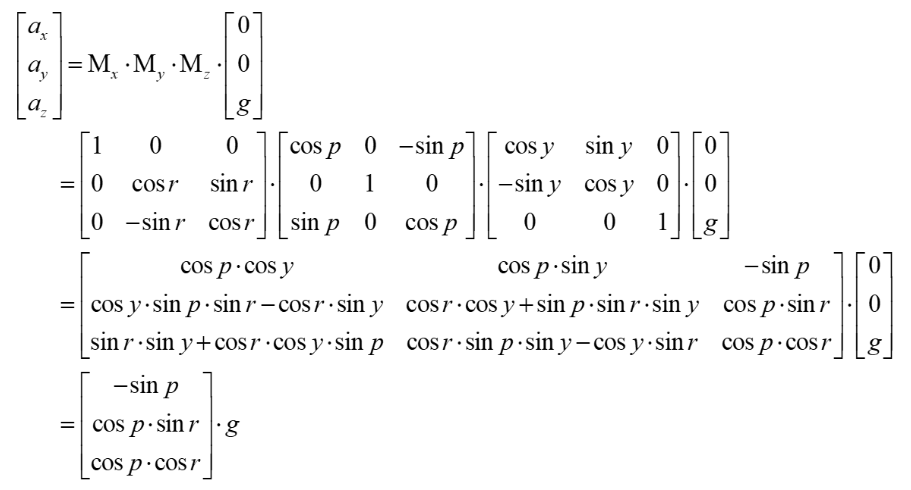
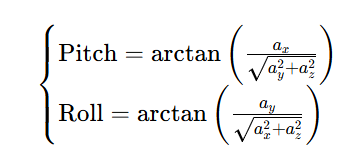
解這個方程,可以得到roll和pitch角(由于繞Z旋轉(zhuǎn)時,感受到的重力加速度是不變的,因此加速度計無法計算****yaw角)
當IMU繞Z軸旋轉(zhuǎn)y度,再繞Y軸旋轉(zhuǎn)P度,再繞X軸旋轉(zhuǎn)r度,其終止位姿可以表示為:
根據(jù)機器人運動學:對于一個傳感器的末端姿態(tài),我們可以將其看作分別繞z、y,x軸旋轉(zhuǎn)得到,其中正向運動學的繞各軸的旋轉(zhuǎn)矩陣如下:
現(xiàn)在我們已知了初始位姿,終止位姿、繞三軸的旋轉(zhuǎn)矩陣,對其進行機器人逆運動學的求解,可求得繞三個軸的旋轉(zhuǎn)角度:
因為MPU6050是繞運動坐標系旋轉(zhuǎn),所以對應的矩陣變換是左乘:
解這個方程,可以得到roll和pitch角(由于繞Z旋轉(zhuǎn)時,感受到的重力加速度是不變的,因此加速度計無法計算yaw角)
解這個方程,可以得到roll和pitch角(由于繞Z旋轉(zhuǎn)時,感受到的重力加速度是不變的,因此加速度計無法計算yaw角)
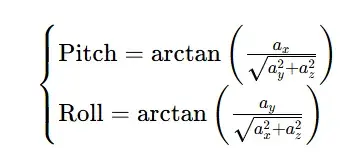
對應C語言代碼:
//(atan2返回弧度,需轉(zhuǎn)成度) Pitch角公式:atan2(AX, sqrt(AY2 + AZ2)) × (180/π)
accAnglePitch = atan2(ax, sqrt(ay*ay + az*az)) * (180.0f / M_PI);
// (若算roll角:atan2(AY, sqrt(AX2 + AZ2)) × (180/π))
accAngleRoll = atan2(ay, sqrt(ax*ax + az*az)) * (180.0f / M_PI);
2.2利用陀螺儀解算姿態(tài)
我們知道陀螺儀輸出的是角速度,我們對其進行積分,可以得到角度:
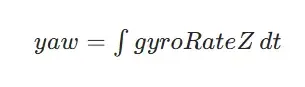
yaw角解算對應代碼:
float gyroRateZ = -((gz / GYRO_SENSITIVITY) - gyroBiasZ); // 扣除零偏后的角速度后取反 // 步驟3:角速度積分計算Yaw角(核心:角度 = 角速度 × 時間) // 復用IMU_Process_Kalman中已計算的dt(采樣時間,單位s) Cacl_yawAngle += gyroRateZ * dt;
pitch和roll角對應解算公式:


pitch和roll角對應解算代碼(此代碼在卡爾曼濾波器中,根據(jù)傳入?yún)?shù)pitch和roll來決定解算什么角):
//此代碼在卡爾曼濾波器中,根據(jù)傳入?yún)?shù)pitch和roll來決定解算什么角
float KalmanFilter(float newAngle, float newRate, float dt,
float *kalmanAngle, float *kalmanBias, float kalmanP[2][2])
float rate = newRate - *kalmanBias; // 減去偏置
*kalmanAngle += dt * rate; // 積分得到角度變化
-
姿態(tài)檢測
+關注
關注
0文章
7瀏覽量
7322 -
MPU6050
+關注
關注
39文章
313瀏覽量
76807 -
姿態(tài)解算
+關注
關注
0文章
50瀏覽量
8661
發(fā)布評論請先 登錄
mpu6050解算姿態(tài)問題
請問怎么mpu6050姿態(tài)解算之后的數(shù)據(jù)與pid算法結(jié)合控制平衡小車
請問MPU6050的軟件解算姿態(tài)和DMP解算姿態(tài)各自的優(yōu)缺點是什么?
使用MPU6050硬件DMP解算姿態(tài)
MPU6050姿態(tài)融合解算的相關資料推薦
mpu6050姿態(tài)解算原理分析及程序設計

mpu6050姿態(tài)解算原理_mpu6050姿態(tài)解算程序
MPU6050的四元數(shù)解算姿態(tài)方法

畢業(yè)設計之 - 教程:MPU6050姿態(tài)解算
CW32L012讀取MPU6050姿態(tài)數(shù)據(jù)




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論