 CW32L012讀取MPU6050姿態數據
CW32L012讀取MPU6050姿態數據

引言
隨著物聯網、可穿戴設備、工業傾角檢測等場景的普及,低成本、低功耗的姿態檢測方案成為嵌入式領域的研究熱點。MPU6050 作為集成三軸加速度計和三軸陀螺儀的六軸傳感器,憑借低成本、小體積的優勢被廣泛應用,但單一傳感器存在明顯缺陷:加速度計易受運動加速度干擾(動態精度差),陀螺儀存在零漂累積誤差(靜態精度差)。
CW32L012 是武漢芯源半導體推出的 32 位 ARM Cortex-M0 + 內核 MCU,具備超低功耗(睡眠模式電流 μA 級)、高性價比、豐富的外設接口(I2C、UART 等)的特點,非常適合邊緣端低資源、低功耗的傳感融合場景。
本文基于 CW32L012 主控,實現 MPU6050 的傳感器數據讀取、基礎姿態解算,并通過卡爾曼濾波完成加速度計與陀螺儀的數據融合,最終輸出高精度、高魯棒性的姿態角。
意義
基于 CW32L012 的 MPU6050 數據讀取、姿態解算與卡爾曼數據融合方案,一方面針對性破解了 MPU6050 單一傳感器加速度計易受運動加速度干擾、陀螺儀存在零漂累積誤差的精度短板,依托卡爾曼濾波實現的多源數據融合,在 CW32L012 μA 級低功耗與 96MHz 主頻兼顧運算效率的硬件支撐下,在邊緣端低資源、低功耗的約束中實現了姿態檢測靜態與動態精度的同步提升,完美適配物聯網、可穿戴設備、工業傾角檢測等場景對 “低成本 + 低功耗 + 高精度” 姿態檢測的需求;
另一方面該方案以國產 CW32L012 為核心載體,驗證了國產 Cortex-M0 + 內核 MCU 在傳感數據處理、輕量化算法運算場景下的性能潛力,打破了低功耗傳感融合領域對進口 MCU 的依賴,同時這套覆蓋傳感器讀取、解算、融合全流程的輕量化方案,也為嵌入式開發者提供了可直接移植的參考模板,降低了中小廠商的研發門檻,助力國產嵌入式芯片在感知層細分領域的產業化落地。
CW32L012C8T6介紹
CW32L012 是武漢芯源半導體 (CW) 推出的 32 位低功耗 MCU,基于 ARM Cortex-M0 + 內核,主頻高達 96MHz,集成64KB Flash和8KB RAM,專為需要高性價比和低功耗的應用設計。
一、核心規格:

二、關鍵特性
高性能計算單元
擴展算術運算單元 (EAU):硬件加速除法和開方運算,大幅提升數學計算效率
CORDIC 硬件單元:支持三角函數、矢量旋轉等復雜運算
雙 12 位 ADC:最高 1M SPS 轉換速度,內置 1.2V 基準電壓,支持單端 / 差分模式
豐富外設資源
通信接口:3 路 UART (支持 LIN)、2 路 I2C (支持 SMBus)、3 路 SPI (最高 24Mbps)
定時器陣列:高級定時器 (6 路 PWM)、4 個通用定時器、低功耗定時器、霍爾傳感器專用定時器等
40 路 GPIO:全部支持中斷和喚醒功能,推挽 / 開漏輸出
超低功耗設計
多種低功耗模式:Sleep、DeepSleep
靈活時鐘管理:可獨立關斷各外設時鐘,降低功耗
低功耗定時器:支持低功耗模式下的定時喚醒
可編程 LVD:低電壓檢測,防止異常斷電
三、應用場景
電機控制領域
家電電機控制 (風扇、空調)
工業自動化設備
測量與監測設備
充電器控制
電池管理系統 (BMS)
智能插座、電表
便攜式設備 (MP3 播放器)
智能玩具 (如 "哈基汪" 智能小車)
MPU6050介紹與開發
一、MPU6050介紹
1.1MPU6050簡介
MPU6050是一款高性能的六軸運動傳感器,集成了三軸加速度計和三軸陀螺儀。它能夠測量加速度和角速度,廣泛應用于姿態測量、運動檢測、機器人控制等領域。MPU6050的主要特性如下:
三軸加速度計:測量范圍為±2g/±4g/±8g/±16g(可選 單位g為重力加速度)。
三軸陀螺儀:測量范圍為±250°/s/±500°/s/±1000°/s/±2000°/s(可選)。
數字運動處理器(DMP):支持復雜的運動處理算法,如姿態解算。
低功耗:適合電池供電的便攜式設備。
高精度:能夠提供高精度的加速度和角速度數據。

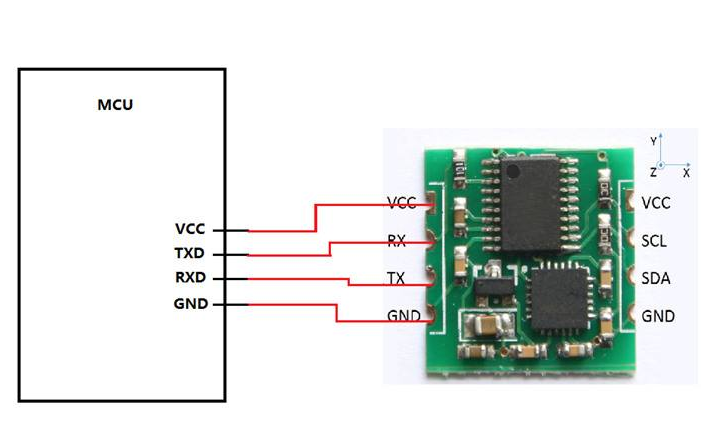
1.2 MPU6050的引腳定義
MPU6050模塊通常具有以下引腳:
VCC:電源正極(3.3V或5V)。
GND:電源地。
SDA:IIC數據線。
SCL:IIC時鐘線。
INT:中斷輸出引腳(可選)。
AD0:地址選擇引腳,用于設置IIC設備地址。
1.3MPU6050寄存器解析
MPU6050通過IIC接口與微控制器通信,數據存儲在內部寄存器中。下面將介紹我們完成功能所主要用寄存器:
PWR_MGMT_1:電源管理寄存器,用于設置傳感器的工作模式。
SMPLRT_DIV:采樣率分頻寄存器,用于設置數據采樣率。
CONFIG:配置寄存器,用于設置數字低通濾波器(DLPF)。
GYRO_CONFIG:陀螺儀配置寄存器,用于設置測量范圍。
ACCEL_CONFIG:加速度計配置寄存器,用于設置測量范圍。
ACCEL_XOUT_H/L、ACCEL_YOUT_H/L、ACCEL_ZOUT_H/L:加速度數據寄存器。
GYRO_XOUT_H/L、GYRO_YOUT_H/L、GYRO_ZOUT_H/L:陀螺儀數據寄存器
二、MPU6050驅動開發
2.1 寄存器描述
配置寄存器用于設置MPU6050的工作模式、采樣率、濾波器等參數。以下是幾個常用配置寄存器的詳細說明:

PWR_MGMT_1(0x6B):
位7:設備復位位,寫入0x80復位設備。
位0-2:時鐘源選擇,通常設置為0x00,使用內部時鐘。
GYRO_CONFIG(0x1B):
位3-0:陀螺儀量程選擇,可選范圍為±250°/s、±500°/s、±1000°/s、±2000°/s。
ACCEL_CONFIG(0x1C):
位3-0:加速度計量程選擇,可選范圍為±2g、±4g、±8g、±16g。
SMPLRT_DIV(0x19):
位7-0:采樣率分頻值,設置為0時,采樣率最高
為了方便,先在MPU6050_Reg.h里面宏定義常用的寄存器:
#define MPU6050_SMPLRT_DIV 0x19 #define MPU6050_CONFIG 0x1A #define MPU6050_GYRO_CONFIG 0x1B #define MPU6050_ACCEL_CONFIG 0x1C #define MPU6050_ACCEL_XOUT_H 0x3B #define MPU6050_ACCEL_XOUT_L 0x3C #define MPU6050_ACCEL_YOUT_H 0x3D #define MPU6050_ACCEL_YOUT_L 0x3E #define MPU6050_ACCEL_ZOUT_H 0x3F #define MPU6050_ACCEL_ZOUT_L 0x40 #define MPU6050_TEMP_OUT_H 0x41 #define MPU6050_TEMP_OUT_L 0x42 #define MPU6050_GYRO_XOUT_H 0x43 #define MPU6050_GYRO_XOUT_L 0x44 #define MPU6050_GYRO_YOUT_H 0x45 #define MPU6050_GYRO_YOUT_L 0x46 #define MPU6050_GYRO_ZOUT_H 0x47 #define MPU6050_GYRO_ZOUT_L 0x48 #define MPU6050_PWR_MGMT_1 0x6B #define MPU6050_PWR_MGMT_2 0x6C #define MPU6050_WHO_AM_I 0x75
2.2 對MPU6050寄存器進行讀寫
2.2.1 寫入寄存器
通過IIC接口向MPU6050的寄存器寫入數據,可以配置傳感器的工作模式、量程、采樣率等參數。以下是寫入寄存器的代碼實現:
/**
* 函 數:MPU6050寫寄存器
* 參 數:RegAddress 寄存器地址,范圍:參考MPU6050手冊的寄存器描述
* 參 數:Data 要寫入寄存器的數據,范圍:0x00~0xFF
* 返 回 值:無
*/
void MPU6050_WriteReg(uint8_t RegAddress, uint8_t Data)
{
MyI2C_Start(); //I2C起始
MyI2C_SendByte(MPU6050_ADDRESS); //發送從機地址,讀寫位為0,表示即將寫入
MyI2C_ReceiveAck(); //接收應答
MyI2C_SendByte(RegAddress); //發送寄存器地址
MyI2C_ReceiveAck(); //接收應答
MyI2C_SendByte(Data); //發送要寫入寄存器的數據
MyI2C_ReceiveAck(); //接收應答
MyI2C_Stop(); //I2C終止
}
2.2.2讀取寄存器
通過IIC接口從MPU6050的寄存器讀取數據,可以獲取傳感器的配置狀態或測量數據。以下是讀取寄存器的代碼實現:
/**
* 函 數:MPU6050讀寄存器
* 參 數:RegAddress 寄存器地址,范圍:參考MPU6050手冊的寄存器描述
* 返 回 值:讀取寄存器的數據,范圍:0x00~0xFF
*/
uint8_t MPU6050_ReadReg(uint8_t RegAddress)
{
uint8_t Data;
MyI2C_Start(); //I2C起始
MyI2C_SendByte(MPU6050_ADDRESS); //發送從機地址,讀寫位為0,表示即將寫入
MyI2C_ReceiveAck(); //接收應答
MyI2C_SendByte(RegAddress); //發送寄存器地址
MyI2C_ReceiveAck(); //接收應答
MyI2C_Start(); //I2C重復起始
MyI2C_SendByte(MPU6050_ADDRESS | 0x01); //發送從機地址,讀寫位為1,表示即將讀取
MyI2C_ReceiveAck(); //接收應答
Data = MyI2C_ReceiveByte(); //接收指定寄存器的數據
MyI2C_SendAck(1); //發送應答,給從機非應答,終止從機的數據輸出
MyI2C_Stop(); //I2C終止
return Data;
}
2.3 初始化MPU6050
根據上述的讀/寫寄存器函數,對6050的寄存器進行初始化配置:
/**
* 函 數:MPU6050初始化
* 參 數:無
* 返 回 值:無
*/
void MPU6050_Init(void)
{
MyI2C_Init(); //先初始化底層的I2C
/*MPU6050寄存器初始化,需要對照MPU6050手冊的寄存器描述配置,此處僅配置了部分重要的寄存器*/
MPU6050_WriteReg(MPU6050_PWR_MGMT_1, 0x01); //電源管理寄存器1,取消睡眠模式,選擇時鐘源為X軸陀螺儀
MPU6050_WriteReg(MPU6050_PWR_MGMT_2, 0x00); //電源管理寄存器2,保持默認值0,所有軸均不待機
MPU6050_WriteReg(MPU6050_SMPLRT_DIV, 0x09); //采樣率分頻寄存器,配置采樣率
MPU6050_WriteReg(MPU6050_CONFIG, 0x06); //配置寄存器,配置DLPF
MPU6050_WriteReg(MPU6050_GYRO_CONFIG, 0x18); //陀螺儀配置寄存器,選擇滿量程為±2000°/s
MPU6050_WriteReg(MPU6050_ACCEL_CONFIG, 0x18); //加速度計配置寄存器,選擇滿量程為±16g
}
2.4MPU6050數據讀取
根據上述的讀/寫寄存器函數,將6050的數據從對應的寄存器讀出來:
/**
* 函 數:MPU6050獲取數據
* 參 數:AccX AccY AccZ 加速度計X、Y、Z軸的數據,使用輸出參數的形式返回,范圍:-32768~32767
* 參 數:GyroX GyroY GyroZ 陀螺儀X、Y、Z軸的數據,使用輸出參數的形式返回,范圍:-32768~32767
* 返 回 值:無
*/
void MPU6050_GetData(int16_t *AccX, int16_t *AccY, int16_t *AccZ,
int16_t *GyroX, int16_t *GyroY, int16_t *GyroZ)
{
uint8_t DataH, DataL; //定義數據高8位和低8位的變量
DataH = MPU6050_ReadReg(MPU6050_ACCEL_XOUT_H); //讀取加速度計X軸的高8位數據
DataL = MPU6050_ReadReg(MPU6050_ACCEL_XOUT_L); //讀取加速度計X軸的低8位數據
*AccX = (DataH
-
傳感器
+關注
關注
2577文章
55234瀏覽量
792602 -
mcu
+關注
關注
147文章
19012瀏覽量
400293 -
嵌入式
+關注
關注
5202文章
20532瀏覽量
335560 -
MPU6050
+關注
關注
39文章
313瀏覽量
76768
發布評論請先 登錄
mpu6050解算姿態問題
MPU6050無法讀取姿態角
MPU6050的使用步驟
STM32 MPU6050模塊數據獲取
【迪文COF結構智能屏試用體驗】使用MPU6050與COF屏實現航空姿態儀表
mpu6050姿態融合原理及程序代碼
mpu6050姿態解算原理分析及程序設計

mpu6050姿態解算原理_mpu6050姿態解算程序

基于MPU6050與COF屏的航空姿態儀表




 工商網監
工商網監
評論