 為什么它的雙天線基線設計,成了航向精度關鍵?
為什么它的雙天線基線設計,成了航向精度關鍵?

在組合導航領域,航向角精度是設備的生死線,無論是低空無人機航拍的影像拼接,還是測繪工程的方向基準校準,一絲航向誤差都可能導致最終成果偏離規范要求。同為MEMS組合導航方案,為何部分產品航向精度僅能達到±0.1°,而ER-GNSS/MINS-01(下稱“組合導航01”)卻能穩定實現±0.05°(雙天線GNSS模式),后處理精度更是低至±0.01°?
答案的核心,藏在組合導航01的雙天線設計中。并非簡單多裝一根天線,而是通過硬件參數優化與算法協同,直接突破單天線方案的精度瓶頸。本文將從單天線短板拆解,雙天線設計邏輯,精度保障原理三個維度,解析這一設計為何能成為組合導航01航向精度的壓艙石。
一、單天線方案的航向精度瓶頸,到底卡在哪?
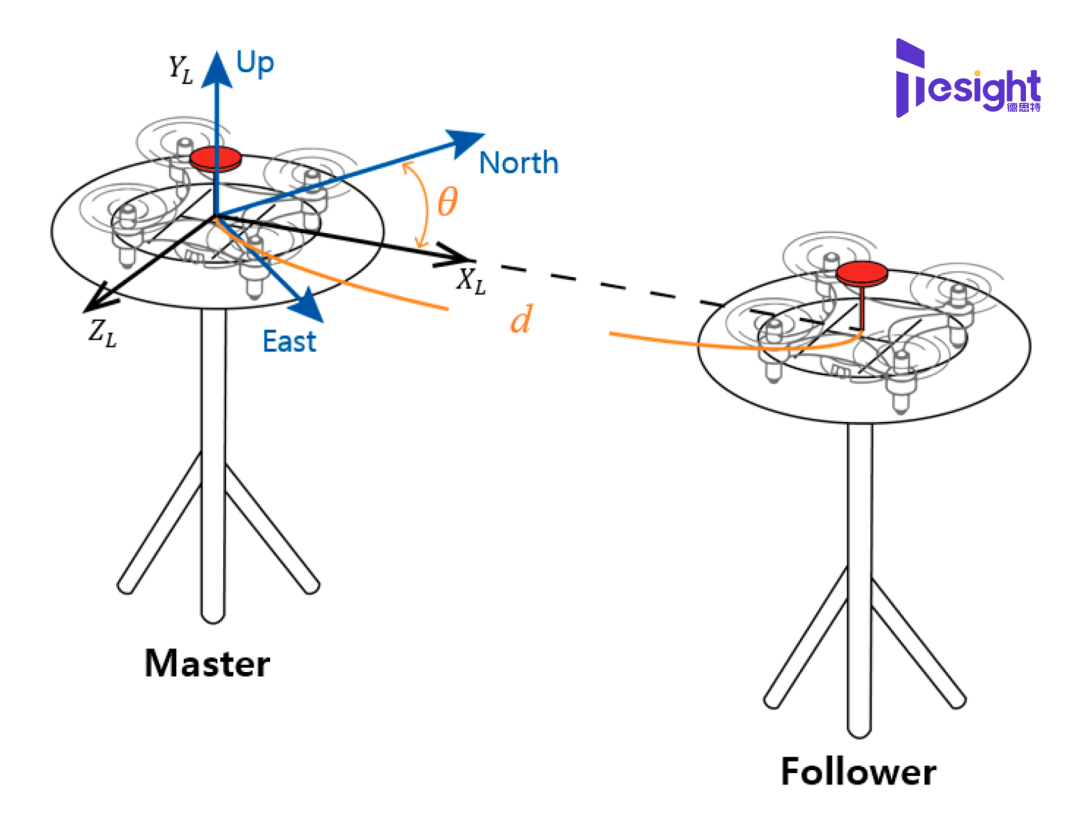
航向角是載體指向與正北方向的夾角,其精度依賴絕對方向基準,但單天線方案在此存在不可規避的短板,尤其在低速或靜止場景中問題凸顯。
單天線的航向角計算,本質依賴GNSS 單點定位的軌跡推算,需通過前后兩個位置點的坐標差反推航向(即軌跡方位角)。若載體處于低速或靜止狀態,前后位置點幾乎重合,坐標差趨近于零,航向角會出現數值震蕩,甚至無法輸出有效數據;如遇 GNSS 信號遮擋、多路徑效應,精度也會快速劣化,無法滿足測繪級需求。
二、雙天線基線設計如何從硬件破局?
組合導航01的雙天線基線采用固定間距設計,核心是通過兩顆天線的相對位置建立方向基準,徹底擺脫對載體自身運動的依賴,硬件端的優化邏輯可歸結為:
1.固定基線間距:平衡精度與實用性
根據 GNSS 相對定位原理,雙天線無需依賴載體運動,只需通過兩顆天線的衛星信號計算基線向量(含距離、方位角信息),即可直接反推航向角。組合導航 01 的基線間距經多場景實測優化,過短會放大方位角計算誤差,過長則增加載體安裝難度,當前固定間距既確保了方位角計算精度,又適配無人機、無人車等多數載體的安裝空間,實現靜止狀態秒出航向角。
2.全系統全頻點天線:保障信號連續性
兩顆天線均支持 BDS/GPS/GLONASS/Galileo/QZSS 全系統全頻點接收,主從天線同步匹配關鍵頻點(如 BDS B1L/B2L/B3L、GPS L1C/A/L2C)。即便在城市峽谷等信號復雜場景,雙天線也能通過多系統信號互補,避免單天線信號斷連,確保基線向量計算的連續性,為航向精度提供穩定輸入。
三、算法協同(GNSS+INS),如何鎖死航向精度?
雙天線基線與 INS的算法融合可進一步實現全場景精度覆蓋,核心邏輯分兩步:
1.RTK 載波相位差分:構建航向精度的絕對基準
組合導航 01 的 GNSS 模塊支持 RTK,雙天線模式下通過 載波相位差分計算基線向量。兩顆天線接收同一衛星的載波相位信號,消除衛星鐘差、電離層延遲等公共誤差后,精準獲取天線間相對位置關系,進而反推航向角。這一過程無需依賴單點定位,航向精度直接取決于基線向量計算精度,為測繪級精度奠定基礎。
2.動態權重融合:解決動態 + 失鎖場景的精度續接
組合導航 01 內置導航級 MEMS 陀螺與高精度加速度計,通過動態權重算法與 GNSS 數據融合:
靜態/低速、GNSS 信號穩定時:以 GNSS 基線向量為主,修正INS的零偏誤差,確保航向精度穩定;
中高速動態時:提升 INS 權重,依托陀螺高動態響應,彌補 GNSS 信號延遲;
GNSS 短暫失鎖時:切換為 INS 主導,依托陀螺低零偏特性續算航向角,在規定失鎖時間內保持精度穩定,避免作業中斷。
四、雙天線基線設計的核心價值,不止于精度
組合導航 01 的雙天線基線設計,本質是掌握航向精度優化的核心邏輯:它不僅解決了單天線的痛點,更構建了 “硬件+ 算法” 的精度保障體系 —— 前者確保有信號就有穩定基準,后者確保無信號仍能續接精度,二者協同才讓測繪級航向精度落地。
審核編輯 黃宇
-
基線
+關注
關注
0文章
14瀏覽量
8167 -
GNSS
+關注
關注
9文章
990瀏覽量
51134 -
雙天線
+關注
關注
0文章
8瀏覽量
7869
發布評論請先 登錄
告別雙天線高成本:單天線組合導航系統實現0.1°高精度

高精度雙運放OP297:性能、應用與設計要點
當精度決定成敗:您的設備是否受限于導航可靠性?
北斗賦能雙天線領航:國產組合導航技術重塑測繪無人機新生態
浮點指令(二:雙精度)
雙極化喇叭天線:原理、設計與應用

單天線也能高精度導航?組合導航如何做到低成本與高性能兼得?

雷達天線曲面輪廓度高精度檢測方案

組合導航系統如何用單天線實現低成本?

求助,關于ST的IMU和地磁計用motionfx庫融合后航向角異常的問題求解
ST的IMU和地磁計用motionfx庫融合后航向角異常的原因?
RTK技術揭秘:基線長度如何決定厘米級定位精度?



 工商網監
工商網監
評論