") 4D成像雷達讓悲劇不再發(fā)生
4D成像雷達讓悲劇不再發(fā)生

鋼鐵俠伊隆·馬斯克(Elon Musk)對車載激光雷達技術的鄙視盡人皆知。
“使用車載激光雷達很蠢,任何依賴激光雷達的人都注定要失敗(doomed)”、“昂貴的傳感器是不必要的,這就像是一大堆昂貴的附屬品”、“虛假和愚蠢=高精地圖和激光雷達(False and foolish = HD maps and LiDAR)”、“我們要拋棄激光雷達,記住我的話,這就是我的態(tài)度”...... 2019年4月,他在特斯拉自動駕駛開放日上說的這些話仿佛還在耳邊。
他相信計算機視覺,相信只用攝像頭和雷達傳感器就能搞定自動駕駛。據(jù)消息人士稱,特斯拉正準備更新Model 3,超高分辨率的4D成像雷達或將是更新的一部分。盡管上述消息還未得到最終確認,但考慮到頭部廠商強大的示范效應,以及支持者普遍認為“未來特斯拉FSD 全視覺與4D成像雷達融合將是精明之舉”的態(tài)度,我們似乎很有必要對“4D成像雷達”的魔力進行一番探究。
讓悲劇不再發(fā)生
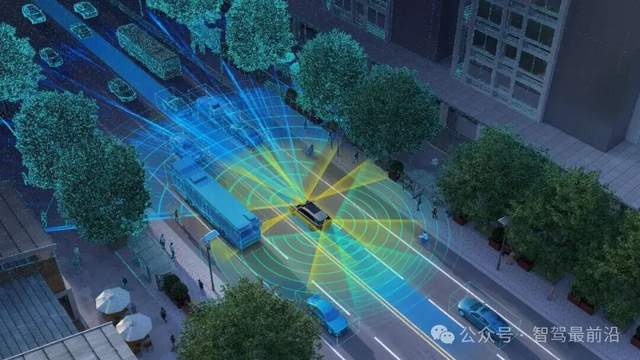
成像雷達是一項突破性的技術,可以在任何光照或天氣條件下,將雷達的功能從測量距離、速度擴展到涵蓋距離(Range)、方位(Azimuth)、俯仰角(Elevation)和相對速度的測量,顯著增強了雷達的性能。通俗地講,與現(xiàn)有傳統(tǒng)毫米波雷達相比,4D成像雷達在水平和俯仰方向上的分辨率得到了極大提高,所以它才能夠不僅可以“理解”水平面,還可以“理解”垂直平面,真正把前方探測到的物體輪廓大概描繪出來,從而幫助車輛判斷是在物體“下方”還是“上方”行駛。
這其實讓我們想起了2016年5月在美國佛羅里達州27A高速公路上發(fā)生的悲劇。一輛特斯拉Model S與一輛橫穿的拖掛車相撞,導致駕駛員喪生。據(jù)多數(shù)媒體報道,配備攝像頭和傳統(tǒng)2D雷達的Model S誤認為車輛可以從拖掛車的底部行駛過去。所以反對者將“全視覺+毫米波雷達”組合稱之為“靜止的公路殺手”也不足為奇,問題之一就是毫米波雷達并不是不能檢測靜止物體,但是會過濾掉靜止物體。
Yole Développement預計4D成像雷達將首先出現(xiàn)在豪華轎車和自動駕駛出租車上,這會帶來5.5億美元以上的投資,并在2020年至2025年間以124%的復合年增長率(CAGR)增長。
先讓我們看看與成像雷達相關的幾種典型應用場景:
一是如果當較小的物體(如行人或摩托車手)與較大的物體(如卡車或其他障礙物)混雜或被掩蓋時,成像雷達系統(tǒng)可以識別,并且可以確定一個區(qū)域的物體是靜止的還是運動的,以及它們朝哪個方向移動,且可以提供檢測范圍超過300m的實時數(shù)據(jù)。
二是以汽車行駛在隧道中為例,得益于俯仰角探測性能的提升,成像雷達現(xiàn)在可以測量整個隧道的長度和寬度,并且能感知物體的幾何形狀,當隧道中出現(xiàn)其它的交通參與者時,比如卡車、摩托車和汽車,成像雷達就可以提供高分辨率圖像。換言之,汽車的視覺更加先進了。
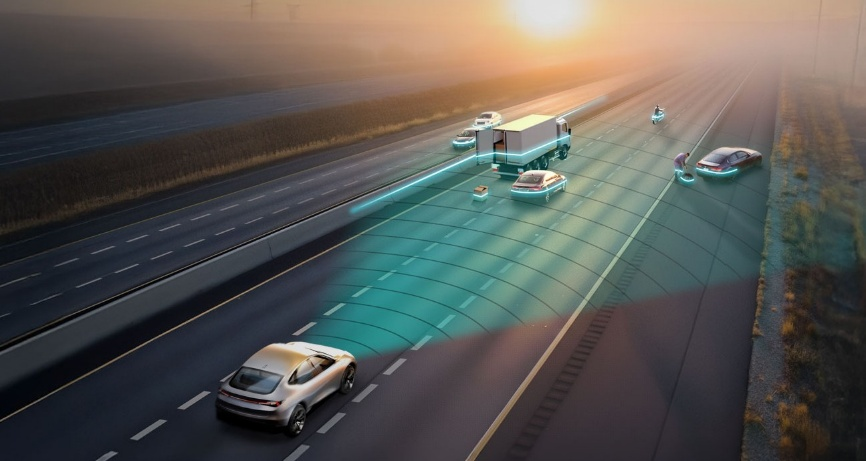
三是假如汽車以每小時80公里的速度在高速公路上行駛,而摩托車(一種反射率低的小物體)以每小時200公里的速度從后面駛來時。與攝像頭和激光雷達不同,成像雷達可以在最初相距較遠時就識別到摩托車,并可識別出這兩個物體在以兩種不同的速度運動。
這意味著,成像雷達不僅提供多模功能,還通過提供超高分辨率圖像,實現(xiàn)了精確的環(huán)境地圖繪制和場景感知,從而擴展了當前可用的L2+級自動駕駛功能,例如高速巡航和變道輔助。而當自動駕駛等級上升至L3及以上時,恩智浦半導體大中華區(qū)汽車電子首席系統(tǒng)架構師黃明達博士認為,4D成像雷達將能夠實現(xiàn)建圖、定位、物體輪廓描繪、被測物體分類等多重功能。與攝像頭,或是模式識別、機器學習相結合后,成像雷達系統(tǒng)就能夠在1°方位角和2°仰角的高分辨率下,以±60度FoV(也有說是100°FoV)感知周邊環(huán)境,這種增強“感知能力”對于復雜駕駛環(huán)境中實現(xiàn)全自動駕駛極為重要。
成像雷達市場逐步升溫
“在過去兩年的時間里,自動駕駛汽車市場正在慢慢降溫,人們對于全自動駕駛的關注度并不高,幾乎沒有廠商在研究L5的全自動駕駛,大部分是在研究L3的量產(chǎn),在接下來3至5年的時間里都是相同的情況,所以我覺得在這樣一個領域,成像雷達相較于激光雷達是有優(yōu)勢的。”恩智浦(NXP)執(zhí)行副總裁兼首席技術官Lars Reger日前在接受《電子工程專輯》采訪時給出了上述的判斷。
恩智浦一直是汽車雷達解決方案領域的領先者,他們希望用成像雷達替代激光雷達的想法已經(jīng)有6年之久了。
在CES 2021上,恩智浦推出了由S32R45雷達處理器與TEF82xx全集成77GHz RFCMOS汽車雷達收發(fā)器組成的成像雷達解決方案,以及基于此形成的可擴展角雷達和前向雷達解決方案。它不僅能提供高分辨率圖像,確保車輛的所有位置都能夠覆蓋雷達,還可以對汽車進行360度的安全環(huán)繞式探測,并支持成像雷達目標識別和分類功能,這對于在城市環(huán)境中的行車和自動泊車至關重要。
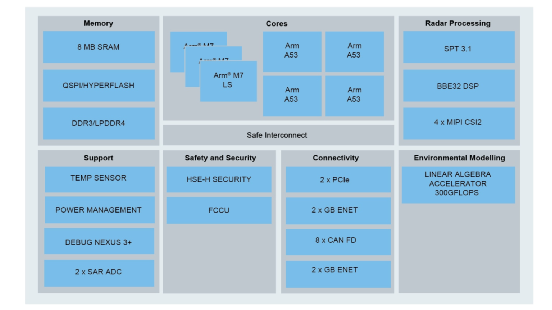
恩智浦S32R45雷達處理器結構框圖
恩智浦并不是唯一關注4D成像雷達的公司。大陸集團在2020年9月宣布其新型ARS 540先進雷達系統(tǒng)利用賽靈思公司的Zynq UltraScale+ MPSoC平臺提供4D成像雷達解決方案。據(jù)稱這項解決方案已做好量產(chǎn)部署準備,預計將在2021年搭載于乘用車上。
大陸集團新型ARS 540先進雷達系統(tǒng)
初創(chuàng)公司Arbe Robotics是傳言中和特斯拉走的最近的公司,其4D成像雷達芯片組提供的物理分辨率據(jù)稱是競爭對手使用的合成或統(tǒng)計分辨率增強方法的2到10倍,還因此獲得了2020年愛迪生獎。其雷達芯片組可提供48個接收通道和48個傳輸通道的實時管理,在保持每秒3兆比特的等效處理吞吐量的同時,可生成30幀/秒的完整4D圖像。
Vayyar Imaging公司高度集成單芯片RF SoC也具備創(chuàng)建高分辨率4D圖像的能力,覆蓋3~10GHz、57~64GHz、以及77~81GHz頻段。2020年初,Vayyar宣布與總部位于日本的汽車零部件供應商Aisin Seiki建立合作伙伴關系,共同開發(fā)汽車4D高分辨率短距離外部傳感器,用于盲點檢測等應用。
2020年初,傳統(tǒng)毫米波雷達巨頭海拉宣布與傲酷雷達(Oculii)建立戰(zhàn)略伙伴關系并且參與了戰(zhàn)略投資,通過整合后者開發(fā)的4D高清成像雷達軟件方案,進一步提升77GHz雷達的性能。雙方預計首款產(chǎn)品將在2023年實現(xiàn)量產(chǎn)。同時,傲酷雷達也在自己獨立開發(fā)4D成像雷達產(chǎn)品,直接面對車廠提供產(chǎn)品。
總體來看,目前市場上4D成像雷達主要采用四類方案,包括將77G和79G標準雷達芯片通過二級/四級聯(lián)/或八級聯(lián)增加實體天線MIMO的方式;或者采用4D成像專用芯片、超材料或者SAR成像、特殊天線陣等方式來實現(xiàn)。
雷達級聯(lián)是用于開發(fā)成像雷達的技術之一。在這種傳感器配置中,多個低功率毫米波傳感器級聯(lián)在一起,并作為單個單元同步運行。這就有了多個接收和發(fā)射通道,從而顯著提高了角分辨率和測距性能。集成的移相器用于創(chuàng)建波束成形,可以將檢測范圍擴大到400m。
使用超材料開發(fā)雷達結構是一種新興的技術趨勢。超材料在表面上嵌入了顯微結構,可實現(xiàn)電磁波濾波器的小型化。這些結構可以與電磁波傳播技術結合使用,創(chuàng)建出比傳統(tǒng)電路要小很多的電路。Yole Développement早在2018年秋季的一份雷達報告中就曾寫到,以Metawave和Uhnder為代表的一些創(chuàng)新型初創(chuàng)公司正在采取顛覆性技術來滿足高分辨率傳感器的要求,例如“采用超薄可操縱光束和人工智能引擎進行深度學習,或為高分辨率成像雷達采用前所未有的高通道數(shù)。”現(xiàn)在來看,應該指的就是他們現(xiàn)在所推出的超材料電子掃描陣列(MESA)雷達。
會取代激光雷達嗎?
Lars Reger曾就自動駕駛系統(tǒng)中雷達的發(fā)展趨勢與媒體進行過多次交流。他解釋說,不論是采用雷達還是攝像頭技術,最終目的是希望車輛擁有一個自我反射系統(tǒng)。就好比我們走路摔倒,脊椎會做出本能的生理反射,讓身體找到平衡一樣,自動駕駛的車輛也要擁有一個這樣的系統(tǒng):例如攝像頭可以探測到車輛前方的物體;雷達能夠告知車輛前方有障礙并發(fā)出警示……在車輛收集到相關信息后,大腦就會啟動,并做出決定。只不過,我們現(xiàn)在還無法完全信賴這一系統(tǒng),因為攝像頭的像素不夠高,雷達的像素也無法達到我們所需要的水平,難免存在一些障礙。
黃明達認為,從成本角度看,毫米波雷達肯定比激光雷達成本低;從產(chǎn)業(yè)發(fā)展角度看,毫米波雷達產(chǎn)業(yè)成熟年份比激光雷達早5-10年左右,尤其相較固態(tài)激光雷達更是如此,所以毫米波雷達成本非常有優(yōu)勢。
聆英咨詢的報告顯示,攝像頭與毫米波雷達成本攝像頭單價一般在600元以下,其中單目攝像頭單價區(qū)間大致在150~600元左右,環(huán)視攝像頭區(qū)間在70~500元左右。毫米波雷達市場中,近程雷達單價在300~400元左右,遠程雷達在800~1200元左右。由Mobileye提供的自動駕駛視覺方案單車總價在幾百美元。
但在自動駕駛領域中,由于各具優(yōu)劣勢,毫米波雷達、激光雷達和攝像頭在L3以上自動駕駛中通常是作為互為冗余、互為備份的系統(tǒng)出現(xiàn)的。例如激光雷達在雨霧、沙塵的天氣情況下就很難實現(xiàn)它所聲稱的性能;攝像頭對光線則會比較敏感;而傳統(tǒng)毫米波雷達盡管全天候能力最強,但除了缺少高度維度的感知外,水平角分辨率低、難以檢測橫穿目標和靜止目標等也是瓶頸。
所以,綜合來看,“未來的技術發(fā)展并非幾種方向選擇其一這么簡單。”一方面,無論從自動駕駛還是輔助駕駛的角度來看,視覺和雷達的多傳感功能在很長一段時間內都會共存,成像雷達的發(fā)展仍處于早期,談取代尚為時過早,一切都還是未知數(shù)。另一方面,由于中國攝像頭技術的發(fā)展水平遠超國外,因此,越來越多的中國ADAS廠商會采用毫米波雷達結合攝像頭的技術,來實現(xiàn)自動駕駛L1、L2甚至部分L3的功能。
在此基礎之上,從高識別率、高分辨率、高精度的成像雷達發(fā)展趨勢來看,一定程度上它可以作為激光雷達目前高成本情況下對市場的補充。換言之,在某些L3-L5的試驗場合下,可以采用成像雷達作為補充,無需采用達到64線高分辨率的激光雷達,而采用16線相對成本較低的激光雷達方案,以達到近似效果,這也是一種平衡的考量。
原文標題:4D成像雷達,讓“靜止的公路殺手”不再出沒
文章出處:【微信公眾號:傳感器技術】歡迎添加關注!文章轉載請注明出處。
責任編輯:haq
-
adas
+關注
關注
311文章
2330瀏覽量
211945 -
激光雷達
+關注
關注
979文章
4472瀏覽量
196564
原文標題:?4D成像雷達,讓“靜止的公路殺手”不再出沒
文章出處:【微信號:WW_CGQJS,微信公眾號:傳感器技術】歡迎添加關注!文章轉載請注明出處。
發(fā)布評論請先 登錄
德賽西威發(fā)布首款支持衛(wèi)星架構的8T8R 4D毫米波雷達
4D毫米波雷達為什么稱為激光雷達的“替身”?
使用單芯片 8 x 8 級聯(lián)收發(fā)器實現(xiàn) 4D 雷達成像
全球體積最小4D FMCW激光雷達亮相!

簡單認識恩智浦第三代成像雷達處理器S32R47系列
CTLRR-540毫米波雷達4D成像應用測試(一)

自動駕駛中4D毫米波雷達在雨霧中更具優(yōu)勢嗎?

單芯片8T8R,全國產(chǎn)“4D衛(wèi)星架構雷達”來了
洛微科技攜4D FMCW激光雷達與3D感知方案閃耀光博會,引領行業(yè)新趨勢

4D毫米波雷達比3D毫米波雷達到底強在哪兒?

恩智浦4D成像雷達如何助力自動駕駛發(fā)展
生成式 AI 重塑自動駕駛仿真:4D 場景生成技術的突破與實踐

LITESTAR 4D應用:運動場照明設計流程
黑芝麻智能視覺與4D毫米波雷達前融合算法介紹




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論