通過分析造成SCARA機(jī)械手的誤差因素原因,從而為了提高機(jī)械手的絕對(duì)定位精度,可以通過以下兩大類方法來實(shí)現(xiàn)
2020-05-17 10:21:00 4856
4856 上。 硬件設(shè)計(jì)配置 研究員給PXI模硬件系統(tǒng)配置軟件運(yùn)算法則。這些系統(tǒng)包括確定性的、實(shí)時(shí)控制器和可接觸試驗(yàn)觸覺設(shè)備傳感器的合適的I/O模塊。采用LabVIEW實(shí)時(shí)模塊,研究員可以將他們的運(yùn)算法則配置到
2018-11-01 15:10:54
汽車焊接的特殊要求。
智能型機(jī)械手 :智能型機(jī)械手具有較高的智能化水平,可以通過傳感器、視覺系統(tǒng)等技術(shù)實(shí)現(xiàn)自主感知、決策和控制。它能夠適應(yīng)復(fù)雜的工作環(huán)境和任務(wù)要求,具有較高的可靠性和安全性。
2024-09-18 10:31:15
機(jī)械手plc
2012-05-28 16:07:10
注塑機(jī)機(jī)械手的驅(qū)動(dòng)系統(tǒng)一般可分為液壓驅(qū)動(dòng),氣壓驅(qū)動(dòng)和電力驅(qū)動(dòng)等三類,也可以根據(jù)工作要求采用上述三種類型的組合系統(tǒng)來完成驅(qū)動(dòng)。在設(shè)計(jì)選用驅(qū)動(dòng)系統(tǒng)時(shí)應(yīng)注意以下幾點(diǎn): (1) 根據(jù)機(jī)械手的負(fù)載量來確定
2012-09-10 09:51:04
電子皮膚的觸覺感知、智能機(jī)械手等方面有重要潛在應(yīng)用。”他說。與此同時(shí),作為柔性可穿戴電子,器件與柔軟組織間的機(jī)械不匹配是該領(lǐng)域需要解決的關(guān)鍵科學(xué)問題之一。針對(duì)上述關(guān)鍵科學(xué)問題,該團(tuán)隊(duì)研發(fā)了一種具有褶皺核
2018-09-21 11:53:21
。 航天空氣動(dòng)力技術(shù)研究院(原中國(guó)航天科技集團(tuán)公司第七0一研究所)是國(guó)內(nèi)最早專業(yè)從事應(yīng)變計(jì)、傳感計(jì)、研究、生產(chǎn)的單位,至今已有近50年的歷史。主要產(chǎn)品有測(cè)力/稱重傳感器、機(jī)械制造、儀器儀表、醫(yī)療設(shè)備、石油化工、工程機(jī)械、航空航天、科研、計(jì)量等國(guó)民經(jīng)濟(jì)領(lǐng)域,深受用戶好評(píng)。
2019-07-29 07:49:18
用Labview怎么控制機(jī)械手動(dòng)作,有沒有這方面學(xué)習(xí)的視頻或資料
2018-04-18 15:33:20
滿足要求的觸覺傳感器是機(jī)器人發(fā)展中的技術(shù)關(guān)鍵之一。隨著微電子技術(shù)的發(fā)展和各種有機(jī)材料的出現(xiàn),已經(jīng)提出了多種多樣的觸覺傳感器的研制方案,但目前大都屬于實(shí)驗(yàn)室階段,達(dá)到產(chǎn)品化的不多。觸覺傳感器按功能大致可分為
2009-12-16 11:05:31
滿足要求的觸覺傳感器是機(jī)器人發(fā)展中的技術(shù)關(guān)鍵之一。隨著微電子技術(shù)的發(fā)展和各種有機(jī)材料的出現(xiàn),已經(jīng)提出了多種多樣的觸覺傳感器的研制方案,但目前大都屬于實(shí)驗(yàn)室階段,達(dá)到產(chǎn)品化的不多。觸覺傳感器按功能大致可分為
2009-12-16 11:09:46
申請(qǐng)理由:本人是江南大學(xué)機(jī)械工程機(jī)電檢測(cè)與控制研究中心在讀研究生,正在做變約束連桿機(jī)械手控制系統(tǒng)的設(shè)計(jì)研究,為提高系統(tǒng)的智能程度,也為了更好的學(xué)習(xí)ARM編程技能,希望可以使用該產(chǎn)品。項(xiàng)目描述:主要
2015-12-02 16:06:26
我又帶著問題來了 LabVIEW和機(jī)械手通信設(shè)備總是要有個(gè)暫停和繼續(xù)運(yùn)行的按鈕我界面做了個(gè)暫停按鈕,可是這個(gè)暫停按鈕只暫停機(jī)械手的程序,并不暫停labview的程序。暫停的時(shí)候我labview
2021-06-21 10:40:49
`力泰科技資訊:數(shù)控車床機(jī)械手因其價(jià)格低、速度快、精度高、質(zhì)量好等優(yōu)點(diǎn)深受企業(yè)家的青睞,數(shù)控機(jī)床和桁架機(jī)器人共同構(gòu)造成一個(gè)柔性單元可以節(jié)省龐大的工件輸送裝置,而且桁架機(jī)械手結(jié)構(gòu)簡(jiǎn)單,適用性強(qiáng)。第一次
2018-08-08 14:34:35
及作業(yè)由機(jī)械手自身的控制系統(tǒng)進(jìn)行自動(dòng)控制,所有的生產(chǎn)作業(yè)程序都按照已定好的程序來完成。3、桁架機(jī)械手控制系統(tǒng)的可編程功能使其在使用時(shí)可重復(fù)編程。4、桁架式機(jī)械手采用了目前已知新的PLC控制技術(shù)和伺服運(yùn)動(dòng)
2020-11-25 15:24:58
本人是研究機(jī)械手控制算法的,現(xiàn)在做了一個(gè)由步進(jìn)電機(jī)驅(qū)動(dòng)機(jī)械手關(guān)節(jié)的機(jī)械手,現(xiàn)在理論算法寫好了,就是不知道如何進(jìn)行實(shí)驗(yàn)實(shí)驗(yàn),我的疑問如下: 因?yàn)榭刂扑惴ㄖ械目刂?b class="flag-6" style="color: red">器如:T=Mq**+Cq*+g,都是表示
2016-11-21 16:21:59
中MWNT濃度發(fā)生變化,使材料電阻發(fā)生顯著變化。本文旨在利用MWNT/SBS薄膜的力敏特性,構(gòu)建由多個(gè)力敏單元形成的壓力傳感陣列,控制并讀取在分布力作用下各個(gè)傳感單元的電阻變化,并將電阻變化轉(zhuǎn)換成相應(yīng)作用力大小,將其顯示到電腦屏幕上。基于MWNT/SBS薄膜的柔性觸覺傳感器,能應(yīng)用于非平面表面的壓力傳感。`
2011-03-08 13:13:50
畢設(shè)題目: 基于物聯(lián)網(wǎng)技術(shù)的室內(nèi)無線定位技術(shù)研究 ,可以用無線傳感器網(wǎng)絡(luò)定位來做么?
2016-05-18 22:35:13
如何對(duì)機(jī)械手進(jìn)行組裝并且調(diào)試呢?
2022-01-20 07:05:01
研究目標(biāo)設(shè)計(jì)一款基于STM32的仿生機(jī)械手:(1)基于STM32的仿生機(jī)械手實(shí)現(xiàn)無線控制和有線控制。 (2)實(shí)現(xiàn)串口指令控制仿生機(jī)械手動(dòng)作。(3)實(shí)現(xiàn)仿生機(jī)械手具有多種工作模式。(4)實(shí)現(xiàn)數(shù)據(jù)手套
2022-01-07 06:55:18
`注塑機(jī)機(jī)械手的所有動(dòng)作都在控制系統(tǒng)的指揮下完成,尤其是機(jī)械手與注塑機(jī)的協(xié)調(diào)工作關(guān)系,更是要依賴控制系統(tǒng)來達(dá)到。在控制系統(tǒng)的指揮下,機(jī)械手按照預(yù)定的工作程序完成各個(gè)動(dòng)作,從而將注塑生產(chǎn)出的制品從模具
2012-09-11 09:43:54
致力于運(yùn)動(dòng)控制、圖像與視覺傳感等工業(yè)自動(dòng)化技術(shù)的研發(fā)和應(yīng)用,產(chǎn)品廣泛應(yīng)用于印刷設(shè)備、模切設(shè)備、貼合設(shè)備、多軸數(shù)控設(shè)備、機(jī)械手、電子加工和檢測(cè)設(shè)備、激光加工設(shè)備、拋光機(jī)械生產(chǎn)自動(dòng)化等工業(yè)控制領(lǐng)域。
2021-05-18 09:40:06
,傳統(tǒng)的沖壓都是人工放料,會(huì)出現(xiàn)擺放不到位,穿設(shè)通孔時(shí),容易將FPC板撕裂,良品率低,人工成本大。造成這些原因也跟產(chǎn)品生產(chǎn)技術(shù)有關(guān),為了提高良品率減少成本,四元數(shù)研發(fā)了FPC視覺對(duì)位沖床機(jī)械手系統(tǒng),該系
2021-09-26 15:12:08
勞動(dòng)強(qiáng)度的增加,容易產(chǎn)生工傷事故,效率也比較低下,且使用人工上下料的產(chǎn)品質(zhì)量的穩(wěn)定性不夠,不能滿足大批量生產(chǎn)的需求。使用四元數(shù)研發(fā)的上下料機(jī)械手系統(tǒng)就可以很好的解決上述問題,該系統(tǒng)采用ARM9+FPGA
2021-09-27 14:51:00
、文字或不規(guī)則圖形等特征四元數(shù)致力于運(yùn)動(dòng)控制、圖像與視覺傳感等工業(yè)自動(dòng)化技術(shù)的研發(fā)和應(yīng)用,產(chǎn)品廣泛應(yīng)用于印刷設(shè)備、模切設(shè)備、貼合設(shè)備、多軸數(shù)控設(shè)備、機(jī)械手、電子加工和檢測(cè)設(shè)備、激光加工設(shè)備、拋光機(jī)械生產(chǎn)自動(dòng)化等工業(yè)控制領(lǐng)域。
2021-08-11 09:43:18
哪位大俠那里有愛普生機(jī)械手的資料啊!
2014-04-11 20:36:53
滿足要求的觸覺傳感器是機(jī)器人發(fā)展中的技術(shù)關(guān)鍵之一。隨著微電子技術(shù)的發(fā)展和各種有機(jī)材料的出現(xiàn),已經(jīng)提出了多種多樣的觸覺傳感器的研制方案,但目前大都屬于實(shí)驗(yàn)室階段,達(dá)到產(chǎn)品化的不多。觸覺傳感器按功能大致可分為
2009-12-16 11:11:30
表示,他們?cè)谑プ约旱?b class="flag-6" style="color: red">手之后,還是會(huì)感覺有“幻肢”的存在,但是事實(shí)上他們的假肢是沒有觸覺的,而醫(yī)學(xué)研究從未停止,通過薄膜壓力傳感器和醫(yī)療結(jié)合,復(fù)活假肢不再是夢(mèng)想。 有這樣一群科學(xué)家,他們所做的就是讓
2016-05-23 16:42:35
五軸機(jī)械手主臂的負(fù)載慣量是如何去計(jì)算的?五軸機(jī)械手主臂的負(fù)載轉(zhuǎn)矩是如何去計(jì)算的?
2021-06-28 09:17:36
思路是用labvie輸出串口信號(hào)控制一個(gè)舵機(jī)控制器,機(jī)械手的相應(yīng)算法在labview編制的程序中完成,那么我肯定要用到D-H變換之類的算法,相應(yīng)的運(yùn)動(dòng)控制或機(jī)械手控制算法應(yīng)該是有模塊的吧,好像還能仿真吧,我應(yīng)該要下載哪些呢?通過算法計(jì)算后,最終的目的是輸出角度信號(hào)給舵機(jī),讓舵機(jī)運(yùn)動(dòng)。
2015-07-15 17:26:24
PLC機(jī)械手控制的實(shí)現(xiàn)二、設(shè)計(jì)要求:1. 闡述機(jī)械手的工作原理2. 如何實(shí)現(xiàn)PLC對(duì)機(jī)械手的控制3. 機(jī)械手控制程序設(shè)計(jì)第一節(jié) 機(jī)械手的工作原理1.1 機(jī)
2008-12-13 14:15:22 379
379 論述了三軸數(shù)控上下料機(jī)械手的主要結(jié)構(gòu)及特點(diǎn)。
2009-04-07 11:02:4217 基于現(xiàn)場(chǎng)總線的開放結(jié)構(gòu)機(jī)械手控制系統(tǒng)是目前機(jī)械手控制的發(fā)展方向。文章通過對(duì)物料搬運(yùn)機(jī)械手裝置及其控制系統(tǒng)的介紹,提出了基于CAN 總線的機(jī)械手控制系統(tǒng)方案,分析了
2009-06-03 09:10:2928 介紹一種多傳感器機(jī)械手指,手指上安裝了接近覺、滑覺、力覺、熱覺與溫覺等!種傳感器。該手指與一簡(jiǎn)易視覺結(jié)合,能使機(jī)器人完成一些不同截面形狀和材質(zhì)工件的識(shí)別。關(guān)鍵
2009-06-16 15:57:227 介紹一種多傳感器機(jī)械手指,手指上安裝了接近覺、滑覺、力覺、熱覺與溫覺等!種傳感器。該手指與一簡(jiǎn)易視覺結(jié)合,能使機(jī)器人完成一些不同截面形狀和材質(zhì)工件的識(shí)別。關(guān)鍵
2009-06-30 16:12:3449 機(jī)械手常要進(jìn)行抓取作業(yè),為了能把物體抓住而不因夾持力過大而對(duì)物體造成傷害,設(shè)計(jì)了一種具有壓覺和滑覺功能的機(jī)器人觸覺傳感器,對(duì)機(jī)械手抓取物體時(shí)遇到的問題及相應(yīng)的施力
2009-07-08 14:46:2028 對(duì)IGM焊接機(jī)械手常見的故障進(jìn)行分析,對(duì)故障現(xiàn)象提出了經(jīng)濟(jì)有效的解決方法。關(guān)鍵詞:IGM焊接機(jī)械手+傳感器+譯碼器
2009-07-15 10:02:5733 討論了柔性機(jī)械手末端負(fù)載變化時(shí)的控制問題。應(yīng)用奇異攝動(dòng)將雙連桿柔性機(jī)械手系統(tǒng)分解為慢變、快變兩個(gè)子系統(tǒng)。提出一種慢變子系統(tǒng)采用自適應(yīng)模糊滑模控制、快變子系統(tǒng)采
2009-09-16 10:10:4214 智能控制器在機(jī)器人機(jī)械手位置控制中的應(yīng)用
以JJR-1型教學(xué)機(jī)器人為基礎(chǔ)描述了智能控制器在機(jī)械手定位控制中的應(yīng)用。對(duì)機(jī)器人機(jī)械手的肴關(guān)節(jié)進(jìn)行了測(cè)試
2010-04-02 10:51:4531 無線傳感器網(wǎng)絡(luò)定位技術(shù)研究摘要:在傳感器網(wǎng)絡(luò)中,位置信息對(duì)傳感器網(wǎng)絡(luò)的監(jiān)測(cè)活動(dòng)至關(guān)重要,確定事件發(fā)生的位置或獲取消息的節(jié)點(diǎn)位置是傳感器網(wǎng)絡(luò)最基
2010-05-28 14:06:0134 控制要求:機(jī)械手一個(gè)工作周期可分為八步:第一步是當(dāng)左工作臺(tái)上有工件出現(xiàn)時(shí),I1.5=1,機(jī)械手開始下降,下降到位時(shí),I0.5=1,停止下降,第一步結(jié)束。第二步是機(jī)械手
2010-07-08 12:35:5466 電視機(jī)背板機(jī)械手雙工位連續(xù)光纖焊接設(shè)備應(yīng)用范圍: 激光焊機(jī)可應(yīng)用范圍:動(dòng)力電池、電子原件、傳感器、鐘表、精密機(jī)械、通信、電機(jī)馬達(dá)轉(zhuǎn)子、汽車安全氣囊
2024-09-21 14:10:23
實(shí)驗(yàn) 機(jī)械手的PLC的自動(dòng)控制一.實(shí)驗(yàn)?zāi)康?. 掌握機(jī)械手步進(jìn)控制程序設(shè)計(jì)2. 進(jìn)一
2008-09-30 12:27:205741 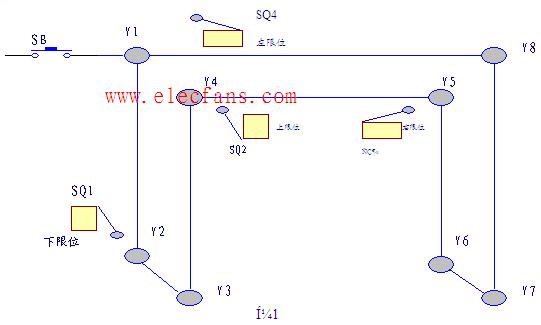
機(jī)械手行車控制電路
2009-02-09 16:13:081643 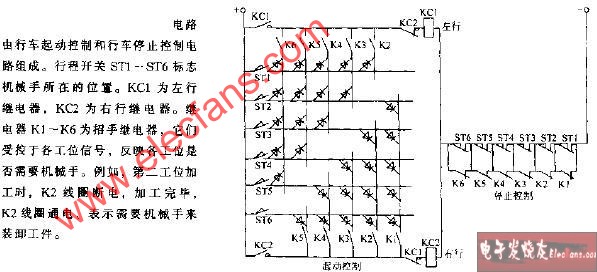
PLC在機(jī)械手步進(jìn)控制中的應(yīng)用
機(jī)械手是工業(yè)自動(dòng)控制領(lǐng)域中經(jīng)常遇到的一種控制對(duì)象。機(jī)械手可以完成許多工作,如搬物、裝配、切割
2009-06-19 14:11:082256 
通過對(duì)物料搬運(yùn)機(jī)械手裝置結(jié)構(gòu)與功能的介紹,提出了一種電氣伺服和氣動(dòng)伺服相結(jié)合的混合驅(qū)動(dòng)機(jī)械手結(jié)構(gòu)類型,重點(diǎn)分析了基于45, 的機(jī)械手控制系統(tǒng)組成,并詳細(xì)論述了以45, 為核
2011-08-15 17:49:36101 基于PLC的機(jī)械手控制設(shè)計(jì)(畢業(yè)設(shè)計(jì))基于PLC的機(jī)械手控制設(shè)計(jì)(畢業(yè)設(shè)計(jì))
2015-11-13 11:21:000 機(jī)器人機(jī)械手畢業(yè)設(shè)計(jì)論文模板機(jī)器人機(jī)械手畢業(yè)設(shè)計(jì)論文模板
2016-03-07 11:55:1132 真空吸盤式機(jī)械手論文,介紹了機(jī)械手的組成,工作原理,執(zhí)行機(jī)構(gòu)等
2016-05-11 16:40:557 本資料介紹了拓斯達(dá)機(jī)械手的操作和設(shè)置方法!
2016-06-23 17:56:19231 焊接機(jī)器人實(shí)時(shí)跟蹤系統(tǒng)傳感器設(shè)計(jì)技術(shù)研究
2016-08-29 15:02:0315 無線傳感器網(wǎng)絡(luò)關(guān)鍵技術(shù)研究綜述_曹鵬飛
2017-03-15 11:25:160 相對(duì)傳統(tǒng)的機(jī)器人專用控制器控制方式,基于PC的運(yùn)動(dòng)控制卡控制具有成本低、開發(fā)自由度高、與行業(yè)應(yīng)用更加匹配等優(yōu)勢(shì)。領(lǐng)略數(shù)控具備寫機(jī)械手路徑控制的能力,應(yīng)用研華PCI-1245-AE運(yùn)控卡實(shí)現(xiàn)了對(duì)SCARA機(jī)械手的運(yùn)動(dòng)控制。
2017-09-30 15:59:4422 東芝機(jī)械手手動(dòng)控制示教操作
2017-10-20 10:23:527 互聯(lián)網(wǎng)+和工業(yè)技術(shù)的相互結(jié)合,更多的智能化的產(chǎn)品逐漸面世。而文中則將當(dāng)下較為熱門的體感操作和傳統(tǒng)工業(yè)中的機(jī)械手相互結(jié)合,探索一種全新的機(jī)械手操作方式體感操作機(jī)械手。區(qū)別于傳統(tǒng)的機(jī)械手的示教編程的操作方式,體感機(jī)械手利用體感傳感器
2018-01-22 17:14:588 機(jī)械手設(shè)計(jì)必看
2018-02-01 15:14:5483 基于S7200PLC村機(jī)械于的運(yùn)動(dòng)進(jìn)行一系列控制,這些運(yùn)動(dòng)包括手臂上下、左右直線運(yùn)動(dòng),手腕旋轉(zhuǎn)運(yùn)動(dòng),手爪夾緊動(dòng)作和機(jī)械手整體旋轉(zhuǎn)運(yùn)動(dòng)等。所采用的動(dòng)力機(jī)構(gòu)是步進(jìn)電機(jī),能夠做到精確控制。在多個(gè)行程開關(guān)傳感器的保護(hù)下,保證了這些運(yùn)動(dòng)萬無一失。
2018-04-30 10:19:009583 
隨著計(jì)算機(jī)控制技術(shù)、無線傳感器技術(shù)及果蔬采摘設(shè)備的日益結(jié)合與發(fā)展更新,農(nóng)業(yè)果蔬的采摘機(jī)器人機(jī)械手避障系統(tǒng)的研究更為深入具體,更適應(yīng)實(shí)際場(chǎng)合果蔬采摘。為此,從無線傳感器應(yīng)用技術(shù)角度入手,針對(duì)機(jī)械手在
2018-02-09 16:40:560 針對(duì)目前傳統(tǒng)抓胎機(jī)械手在取胎過程中易發(fā)生胎坯變形不對(duì)稱和變形量大的問題,對(duì)抓胎機(jī)械手取胎過程巾影響胎坯縱向和橫向變形的主要因素進(jìn)行了研究,提出了定位內(nèi)撐一體的抓取方法;并結(jié)合實(shí)際宮作要求,從抓胎
2018-03-07 16:36:221 平臺(tái)機(jī)械手定位方法;設(shè)計(jì)了可重復(fù)利用、驅(qū)一動(dòng)分離的自動(dòng)化、低成本高鐵車廂預(yù)裝配柔性實(shí)驗(yàn)平臺(tái)機(jī)械手;通過ANSYS有限元分析T具對(duì)機(jī)械手關(guān)鍵零部件的強(qiáng)度進(jìn)行了分析,驗(yàn)證了機(jī)械手結(jié)構(gòu)的安全可靠性,獲得了機(jī)械手的優(yōu)化結(jié)
2018-03-20 17:59:270 觀看采用Flexis AC 32位微控制器的機(jī)械手如何在曲棍球游戲中戰(zhàn)勝人類對(duì)手
2018-06-19 14:31:003524 雄克 MPG-plus 是功能強(qiáng)大的小型機(jī)械手。除了感應(yīng)式傳感器,它還能通過可編程磁性開關(guān)監(jiān)測(cè)。為了提高工程師在流程和系統(tǒng)設(shè)計(jì)中的靈活性,機(jī)械手可從側(cè)面和底面安裝。為實(shí)現(xiàn)動(dòng)態(tài)應(yīng)用,機(jī)械手外殼設(shè)計(jì)時(shí)減少了多余材料。
2018-09-04 11:50:525906 本書綜合了一百項(xiàng)國(guó)內(nèi)外典型的、應(yīng)用有效的機(jī)械手實(shí)例和有關(guān)資料,系統(tǒng)地介紹了現(xiàn)代機(jī)械手的原理、設(shè)計(jì)和各種機(jī)械手的功能和效果。對(duì)于各類工業(yè)企業(yè)中,致力于研究,探索提高生產(chǎn)效率,改善工作條件,保證質(zhì)量
2019-03-14 08:00:0029 電氣動(dòng)控制設(shè)計(jì),基于機(jī)械手夾持誤差的手指設(shè)計(jì),氣動(dòng)機(jī)械手,氣動(dòng)通用機(jī)械手的設(shè)計(jì)說明書,示教再現(xiàn)式機(jī)械手腕部驅(qū)動(dòng)擺動(dòng)油缸的基本參數(shù)與密封問題,液壓機(jī)械手握力的軟抓取控制,一種氣動(dòng)機(jī)械手夾持機(jī)構(gòu)的設(shè)計(jì),一種氣動(dòng)柔性機(jī)械
2019-04-22 08:00:0029 首先講一下在工業(yè)應(yīng)用中,手和眼(攝像機(jī))的兩種位置關(guān)系,第一種是將攝像機(jī)(眼)固定在機(jī)械手(手)上面,眼隨手移動(dòng);第二種是攝像機(jī)(眼)和機(jī)械手(手)分離,眼的位置相對(duì)于手是固定的
2019-05-07 16:18:107436 那么,機(jī)械手內(nèi)部到底是什么樣的,有什么奧秘嗎?下面和大家分享一下氣動(dòng)機(jī)械手的主要結(jié)構(gòu)。
2019-07-11 14:59:4014506 
隨著機(jī)電一體化技術(shù)和計(jì)算機(jī)技術(shù)的應(yīng)用,工業(yè)機(jī)械手的研究和開發(fā)水平獲得了迅猛的發(fā)展并涉及到人類社會(huì)生產(chǎn)及生活的各個(gè)領(lǐng)域,特別是碼垛機(jī)械手在生產(chǎn)加工中的應(yīng)用。機(jī)械手是進(jìn)袋自動(dòng)控制領(lǐng)域中的一種新型技術(shù)
2020-10-16 10:23:232578 從國(guó)內(nèi)市場(chǎng)來看,生產(chǎn)制造業(yè)全自動(dòng)碼垛機(jī)械手遍及使用汽車零部件行業(yè)、包裝機(jī)械、環(huán)保機(jī)械、儀器儀表等自動(dòng)化行業(yè),而很多新行業(yè)對(duì)全自動(dòng)生產(chǎn)制造業(yè)碼垛機(jī)械手的需求量也不斷上升,推動(dòng)著碼垛機(jī)械手的開展。傳統(tǒng)
2021-05-27 14:58:142102 手動(dòng)機(jī)械手程序資料
2021-12-08 09:20:423 據(jù)麥姆斯咨詢報(bào)道,近日,中國(guó)科學(xué)技術(shù)大學(xué)蘇州高等研究院、中國(guó)科學(xué)院深圳先進(jìn)技術(shù)研究院與復(fù)旦大學(xué)緊密合作,基于高靈敏的離電傳感機(jī)理與折射率匹配策略,研發(fā)出當(dāng)前全球透明度最高的柔性觸覺傳感器件,從機(jī)理
2022-08-30 15:13:442348 電子發(fā)燒友網(wǎng)站提供《使用EMG的機(jī)械手控制.zip》資料免費(fèi)下載
2022-11-07 11:02:5010 的性能,以實(shí)現(xiàn)智能機(jī)器人類人的高靈巧操作。相比于壓阻式、電容式等工作模式的柔性觸覺傳感器,由于壓電式柔性觸覺傳感器在機(jī)器人動(dòng)態(tài)力檢測(cè)應(yīng)用中優(yōu)勢(shì)明顯,成為當(dāng)前的研究熱點(diǎn)。但是,傳統(tǒng)壓電式柔性觸覺傳感器往往存在
2022-11-09 13:09:201629 電子發(fā)燒友網(wǎng)站提供《手勢(shì)控制機(jī)械手開源分享.zip》資料免費(fèi)下載
2022-11-11 15:14:333 傳感新品 【廈門大學(xué):給機(jī)器人穿上靈敏“皮膚”!柔性觸覺傳感器研究有了重要進(jìn)展】 讓智能機(jī)器人靈活自如地工作,少一些“違和感”,觸覺傳感器起著至關(guān)重要的作用。近日,廈門大學(xué)航空航天學(xué)院周偉教授團(tuán)隊(duì)在
2022-11-17 20:24:302327 具有人類觸覺的柔軟機(jī)械手開啟了假肢研究的新領(lǐng)域。手是人類身體接觸所有事物的重要部分,不僅具有觸摸、抓取和抓握的功能,而且指尖還擁有非常敏感且與身體其他部分相連的感覺神經(jīng)。
2023-02-27 10:27:091552 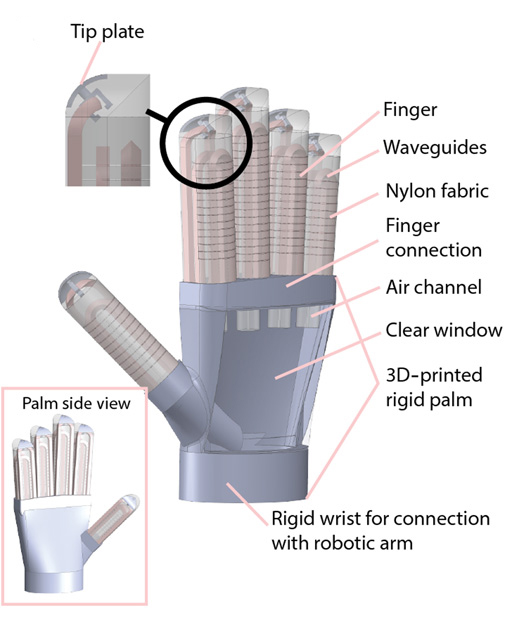
拆包機(jī)械手
2023-03-23 11:11:281415 平面關(guān)節(jié)型機(jī)械手設(shè)
2023-05-29 11:11:331 本文系統(tǒng)設(shè)計(jì)由開發(fā)者針對(duì)目前的一些上肢肢體不健全、自主進(jìn)食有困難的特殊群體,所提出的一款輔助進(jìn)食的服務(wù)型桌面機(jī)械手控制系統(tǒng),以語音、機(jī)器視覺等傳感器技術(shù)為機(jī)器人提供人機(jī)交互的接口以及系統(tǒng)的反饋接口
2022-02-18 10:09:441531 
梳理、分析了核化工項(xiàng)目中各類機(jī)械手的工作原理和功能特點(diǎn),并就各類機(jī)械手的適用場(chǎng)景進(jìn)行了對(duì)比,介紹了在選擇和設(shè)計(jì)機(jī)械手時(shí)需考慮的因素,總結(jié)了當(dāng)前的研究進(jìn)展和未來的發(fā)展趨勢(shì),以期為今后其他項(xiàng)目的機(jī)械手
2023-06-25 14:23:053139 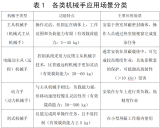
觸覺感知技術(shù)在人機(jī)交互領(lǐng)域具有重要價(jià)值。分布在軟體機(jī)械手的觸覺傳感器能夠在非結(jié)構(gòu)化的場(chǎng)景交互中為人們提供多模態(tài)感知信息
2023-10-17 09:05:202117 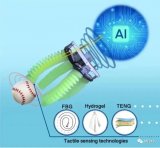
觸覺感知技術(shù)在人機(jī)交互領(lǐng)域具有重要價(jià)值。分布在軟體機(jī)械手的觸覺傳感器能夠在非結(jié)構(gòu)化的場(chǎng)景交互中為人們提供多模態(tài)感知信息,如接觸狀態(tài)(穩(wěn)態(tài)、滑動(dòng)、扭轉(zhuǎn)等)、表面特征(粗糙度、紋理、曲率等)、物理屬性
2023-10-18 10:35:041124 該論文提出了一種模擬皮膚觸覺的柔性仿生光纖觸覺傳感器,能夠同時(shí)檢測(cè)和區(qū)分溫度和壓力。傳感器采用彎曲光纖布拉格光柵(Fiber Bragg Grating,F(xiàn)BG)為敏感元件,結(jié)合液滴狀的彈性體材料對(duì)FBG進(jìn)行包裹封裝。
2023-11-24 12:35:013108 
直線模組是一種常見的機(jī)械傳動(dòng)裝置,廣泛應(yīng)用于機(jī)械手等自動(dòng)化設(shè)備中,在機(jī)械手中的主要作用是實(shí)現(xiàn)機(jī)械手的運(yùn)動(dòng)控制和定位。
2023-12-07 17:38:281557 
近日,開源證券發(fā)布研究報(bào)告稱,柔性觸覺傳感器又稱為“電子皮膚”,能夠?qū)崿F(xiàn)與環(huán)境接觸力、溫度、濕度、震動(dòng)、材質(zhì)、軟硬等特性的監(jiān)測(cè),是機(jī)器人直接感知環(huán)境作用的重要傳感器,有助于智能化的人形機(jī)器人實(shí)現(xiàn)產(chǎn)業(yè)化落地。
2023-12-13 15:52:341800 研究人員從皮膚結(jié)構(gòu)獲取靈感,設(shè)計(jì)了傾斜微毛發(fā)陣列(TMHA)結(jié)構(gòu),作為電容式觸覺傳感器的介電層。人體皮膚是一個(gè)綜合系統(tǒng),包括表皮層、真皮層和皮下組織,以及眾多的機(jī)械感受器。
2023-12-19 10:26:531458 
ZR機(jī)械手:技術(shù)升級(jí),推動(dòng)產(chǎn)業(yè)變革 隨著科技的飛速發(fā)展,自動(dòng)化設(shè)備在各個(gè)產(chǎn)業(yè)領(lǐng)域中的應(yīng)用越來越廣泛。作為自動(dòng)化設(shè)備的重要組成部分,機(jī)械手在提高生產(chǎn)效率、保證產(chǎn)品質(zhì)量、降低勞動(dòng)成本等方面發(fā)揮
2024-01-11 09:21:591247 具有非接觸式傳感功能的柔性傳感器的開發(fā)仍然是觸覺感知的技術(shù)挑戰(zhàn)。
2024-02-28 09:58:432189 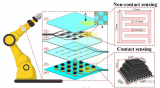
隨著工業(yè)自動(dòng)化技術(shù)的飛速發(fā)展,機(jī)械手作為現(xiàn)代制造業(yè)中不可或缺的重要設(shè)備,其智能化、自動(dòng)化水平不斷提高。在機(jī)械手控制系統(tǒng)中,PLC(可編程邏輯控制器)因其可靠性高、編程簡(jiǎn)單、功能強(qiáng)大等優(yōu)點(diǎn),被廣泛應(yīng)用
2024-06-17 10:46:003555 機(jī)器視覺控制機(jī)械手是一種將機(jī)器視覺技術(shù)與機(jī)械手控制技術(shù)相結(jié)合的自動(dòng)化技術(shù)。它通過機(jī)器視覺系統(tǒng)獲取目標(biāo)物體的圖像信息,然后利用圖像處理技術(shù)對(duì)圖像進(jìn)行分析和處理,從而實(shí)現(xiàn)對(duì)機(jī)械手的精確控制。以下是機(jī)器
2024-07-04 10:40:121786 在自動(dòng)化生產(chǎn)線中,機(jī)械手需要準(zhǔn)確地識(shí)別和吸取特定位置上的網(wǎng)布。網(wǎng)狀物抓取網(wǎng)布表面存在大小不一的孔洞,這給傳統(tǒng)傳感器帶來了很大挑戰(zhàn)。傳統(tǒng)的點(diǎn)光斑傳感器在檢測(cè)時(shí)可能因孔洞而漏檢,或因顏色復(fù)雜而誤檢。因此
2024-08-30 12:48:05906 
? ? ? 在選擇搬運(yùn)機(jī)械手的電機(jī)時(shí),需要考慮多個(gè)因素以確保電機(jī)的性能滿足機(jī)械手的運(yùn)行需求。以下是一個(gè)詳細(xì)的案例分析,說明如何為搬運(yùn)機(jī)械手選擇合適的電機(jī)。 ? ? ? ? 一、電機(jī)類型選擇
2025-01-21 16:44:451594 
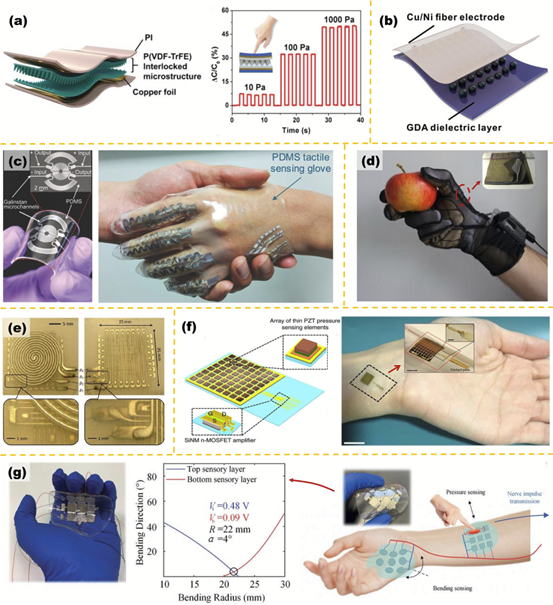
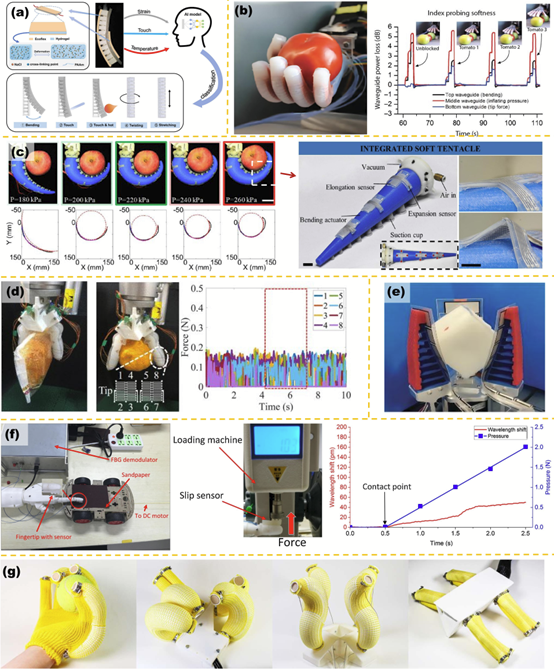
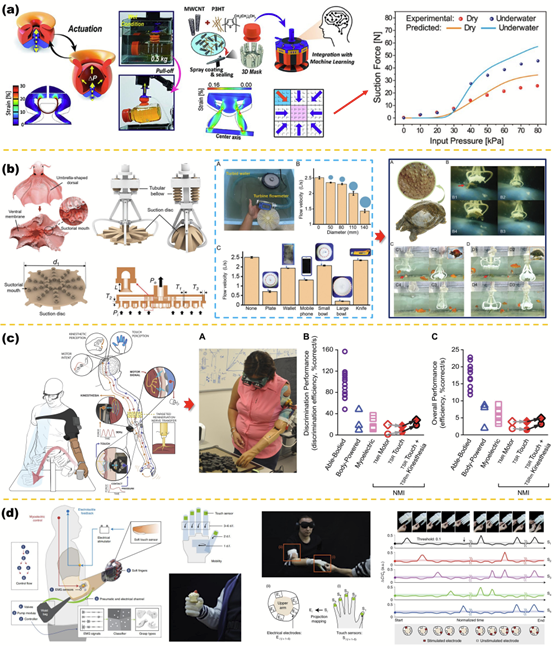
【研究內(nèi)容】 ? ? 中山大學(xué)衣芳教授團(tuán)隊(duì)在" 科學(xué)通報(bào)"期刊上發(fā)表了題為“ 柔性觸覺傳感電子皮膚研究進(jìn)展”的最新論文。本文主要綜述了近年來柔性觸覺傳感電子皮膚的研究進(jìn)展, 重點(diǎn)歸納總結(jié)了上述三類
2025-02-12 17:03:361839 
企業(yè)的技術(shù)競(jìng)速背后,一雙雙“靈巧手”正悄然成為產(chǎn)業(yè)焦點(diǎn)。而在這些機(jī)械手指的每一次抓握、觸碰與反饋中,一種名為“柔性觸覺傳感器”的核心器件,正在重新定義機(jī)器與物理世界的
2025-02-27 15:46:191405 
正運(yùn)動(dòng)運(yùn)動(dòng)控制模塊結(jié)合第三方視覺實(shí)現(xiàn)Delta機(jī)械手柔性上下料應(yīng)用開發(fā)
2025-05-23 10:29:42585 
觸覺傳感陣列是由多個(gè)觸覺傳感單元構(gòu)成的觸覺傳感器。觸覺傳感單元能測(cè)量單點(diǎn)的接觸力,而觸覺傳感陣列由于集成了多個(gè)傳感單元,因此具備分布式接觸力的檢測(cè)能力。目前,觸覺傳感的實(shí)現(xiàn)方法有多種,按其原理可分為
2025-09-19 18:27:401547 
正運(yùn)動(dòng)柔性機(jī)械手供料解決方案
2025-10-09 14:58:29388 
 電子發(fā)燒友App
電子發(fā)燒友App








 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論