PLC與DDC控制器,在樓宇自控系統中哪個應用更有優勢?本文從應用領域、結構差異、安全性等7大方面對其進行對比,詳見本文...
2013-04-07 10:31:40 21870
21870 SLAM作為一種基礎技術,從最早的軍事用途(核潛艇海底定位就有了SLAM的雛形)到今天,已經逐步走入人們的視野,過去幾年掃地機器人的盛行讓它名聲大噪,近期基于三維視覺的VSLAM又讓它越來越顯主流。
2018-08-08 10:07:2810713 特征點法的VSLAM系統中,特征點并不是越多越好;相反, 少量 并且 質量高 的點會讓這個SLAM系統位姿精度更高,且消耗更少的存儲資源和計算資源。
2022-08-23 11:09:482003 激光SLAM局部定位精度高但全局定位能力差且對環境特征不敏感,而視覺SLAM全局定位能力好但局部定位相對激光雷達較差,兩者融合可以提高SLAM系統的精度和魯棒性。
2023-10-23 11:01:142605 
電子發燒友網報道(文/李寧遠)對移動機器人來說,導航定位是最基本最核心的功能之一,機器人自主移動能力建立在出色的導航定位基礎上。目前移動機器人應用得最廣泛的導航定位技術無疑是SLAM技術
2024-05-28 00:20:005276 SLAM技術作為機器人自主移動的關鍵技術,讓很多人都誤解為:SLAM=機器人自主定位導航。 其實,SLAM≠機器人自主定位導航 ,不解決行動問題。 SLAM如其名一樣,主要解決的是機器人的地圖構建
2018-08-24 16:56:24
結合激光雷達或者攝像頭的方法,讓掃地機可以高效繪制室內地圖,智能分析和規劃掃地環境,成功讓自己步入了智能導航的陣列。除了掃地機之外,SLAM技術在其他服務機器人(例如商場導購機器人、銀行機器人
2018-12-06 10:25:32
目前,SLAM(即時定位與地圖構建)技術主要被運用于無人機、無人駕駛、機器人、AR、智能家居等領域,從各應用場景入手,促進消費升級。 機器人 激光+SLAM是目前機器人自主定位導航所
2020-12-01 14:26:37
研究生期間進行了基于2D激光雷達的SLAM的研究,當時主要做了二維激光雷達的數據處理。小弟不才,沒有入得了SLAM的坑,卻一直謎之向往,如今得以機會,決定正式邁出第一步,徹底進入SLAM的坑!心中
2021-08-30 06:13:31
通過編碼器獲得輪式里程計的測量數據,車輪的轉動被轉換成線性位移。對于指定初始位置的運動估計,通過積分得運動增量,從而得到當前的位置信息。 · 該方法具有精度短、成本低、采樣率高的優點 · 但車輪會產生打滑,定位誤差會隨著移動距離增加,影響長期精度 (2)慣性導航 慣性導航系統是自主的,..
2021-09-01 07:15:25
SLAM(同步定位與地圖構建),是指運動物體根據傳感器的信息,一邊計算自身位置,一邊構建環境地圖的過程,解決機器人等在未知環境下運動時的定位與地圖構建問題。目前,SLAM 的主要應用于機器人、無人機、無人駕駛、AR、VR 等領域。其用途包括傳感器自身的定位,以及后續的路徑規劃、運動性能、場景理解。
2020-05-20 08:19:40
機器人定位導航中,目前主要涉及到激光SLAM與視覺SLAM,激光SLAM在理論、技術和產品落地上都較為成熟,因而成為現下最為主流的定位導航方式,在家用掃地機器人及商用送餐機器人等服務機器人中普遍采用了...
2021-07-05 06:41:57
什么是激光SLAM?視覺VSLAM又是什么?激光SLAM和視覺VSLAM有哪些不同之處?
2021-11-10 07:16:02
什么是激光SLAM?激光SLAM技術在機器人運動控制系統中的應用是什么?
2021-07-30 06:37:25
先進的SLAM(同步定位與建圖)技術利用激光雷達實時獲取環境地圖信息,通過處理得到外部地圖實現建圖定位、路徑規劃、避障、人體跟隨等功能達到導航精度厘米級、導航速度0.5m/s級 激光導航AGV為了實現
2017-06-10 14:24:17
`眾所周知,國外的工業機器人比國內發展的早的很多,智能的工業機器人四大家族;ABB、發那科、安川、庫卡、服務機器人幾乎是國內外同時起步的。國外一臺激光導航AGV的價格在100萬左右,國內的激光導航
2017-07-31 11:43:49
,固態設計和靈活操作。同時,激光傳感器多數應用于質量控制、防錯和定位等。 新特光電提供的這款光學錐光全息傳感器基于獨特的錐光全息專利技術,優于現有各種工業應用的標準距離測量方法。該傳感器可靠、準確,不
2021-02-20 11:44:52
是激光雷達+SLAM的定位導航技術。 SLAM表示在不具備周圍環境信息的前提下,讓移動機器人在運動過程中根據自身攜帶的傳感器和對周圍環境的感知進行自身定位,同時增量式構建周圍環境地圖。SLAM可以提高
2018-11-09 15:59:01
項目名稱:機器人激光與視覺融合的導航模塊試用計劃:申請理由本人在機器人SLAM領域有4年開發經驗,從最開始激光SLAM到視覺SLAM,在物流機器人行業不斷創新開發。SLAM技術將賦予為機器人和智能體
2019-07-03 10:50:01
機器人定位導航方式目前機器人常用的定位導航方式有激光定位導航、視覺定位導航、紅外線定位導航、超聲波定位導航、GPS全球定位導航等。1.激光定位導航激光雷達+SLAM技術相結合的激光定位導航主要是通過對目標
2018-10-11 17:49:40
SLAM是什么?VSLAM技術框架主要包括哪些?VSLAM技術擁有哪些核心技術優勢?
2021-07-09 07:29:11
北斗與自動駕駛北斗導航系統怎么樣北斗導航的優勢及應用現狀
2021-02-05 07:34:26
單片機和嵌入式誰更有前景?
2012-06-09 01:55:55
`文字篇幅有點長,可以先Mark。本文來自博客《移動機器人定位與地圖創建(SLAM)方法》稍作修改,侵刪!1.前言:隨著計算機技術的迅速發展,機器人研究的深入以及人們對機器人需求的擴大,能自主導航
2017-09-21 14:26:44
如何實現基于RK3399開發板的cartographer激光SLAM建圖模塊的設計?
2022-03-07 07:05:11
的形狀和周圍環境,結合SLAM算法和視覺傳感器,進行SLAM避障與導航。圖源:Science Robotics障礙物規避A1激光雷達通過不斷的旋轉,發射激光出去,接受激光返回,算出障礙物距離當前的距離
2021-11-12 14:12:43
的工作環境要求。 SKM-4DX引腳定義: 此慣性導航模塊的優勢:(1)擺脫里程計常規車載導航系統往往依靠里程計和陀螺儀的DR方案,實現汽車復雜環境下的高精度導航定位,里程計信號對于很多汽車后裝市場
2020-08-13 01:29:45
一.機器人導航算法工程師崗位職責:1. 負責機器人視覺或激光雷達的SLAM算法的研發和優化;2. 負責機器人自主導航定位算法的研發,主要包括基于深度相機或激光雷達、IMU、里程計等多傳感器信息融合
2020-06-08 05:06:44
服務機器人想要自由行走,實現自主定位導航是關鍵,自主定位導航包括定位、建圖與路徑規劃。SLAM作為機器人定位導航的核心技術,正不斷獲得行業內的重視,但SLAM只是完成定位與地圖創建這兩件事,它并不
2018-10-10 16:29:21
定位導航模塊核心功能 自主定位與建圖采用激光SLAM技術,無需對環境進行修改,即可在未知場景中完成實時定位并利用SharpEdge構圖技術測繪高精度、厘米級別地圖,無需二次優化修飾,直接滿足用戶心理
2018-01-03 11:41:55
。據了解,在不同技術路線中,所使用到的傳感器主要有激光雷達、毫米波雷達以及攝像頭三類,且各具優缺點。 一、主流傳感器對比激光雷達:激光雷達具有高精度、高分辨率的優勢,同時具有建立周邊3D模型的前景
2017-09-06 11:36:58
自主導航小車AGV定位方法的研究[1]
2016-08-29 11:07:35
問題,以下為幾個具體的定位方法:1、業內通用的定位方式是GPS+高精度地圖+攝像機(激光雷達等)信息融合的定位方法。激光雷達的SLAM,利用車輛自帶的GPS和IMU做出大概位置判斷,然后用預先準備好
2019-05-09 04:41:09
視覺SLAM——特征點法與直接法對比以及主流開源方案對比 ORB LSD SVO DSO
2020-06-02 16:56:49
圖引擎,讓機器人在復雜、大面積的場景下也能輕松應對,穩定發揮,完成定位導航任務。 傳統SLAM 及SLAM 3.0的建圖對比: -建圖精度高,圖優化式建圖 - 主動閉環修正 - 建圖穩定、不
2019-01-21 10:57:46
1、引言近年來,智能交通、無人駕駛、車輛緊急定位報警等業務需求越來越迫切,車載導航定位功能是實現上述業務的基礎。車輛的導航定位通過前裝或后裝車載終端來完成,其性能指標直接影響相關業務的用戶體驗,因此對車載終端的導航定位性能進行測試評估是非常必要的。
2019-07-11 06:14:33
建圖,路徑規劃、自主避障等任務,它是目前性能最穩定、可靠性最強的定位導航方法,且使用壽命長,后期改造成本低。 掃地機器人是目前單線激光雷達應用最廣泛的領域,激光雷達配合slam算法,可以讓掃地機
2018-12-10 14:55:39
本文研究了基于多傳感器組合導航方法的SLAM,由于移動機器人無法通過單個傳感器得到可靠的信息,采用多傳感器組合導航的方法可以很好的解決這個問題。本文用單個CCD攝像頭和里程
2011-11-04 16:53:00 91
91 、無人駕駛、AR、VR 等領域。其用途包括傳感器自身的定位,以及后續的路徑規劃、運動性能、場景理解。 由于傳感器種類和安裝方式的不同,SLAM 的實現方式和難度會有一定的差異。按傳感器來分,SLAM 主要分為激光SLAM 和 VSLAM 兩大類。其中,激
2017-11-22 11:52:333 移動機器人在探索未知環境且沒有外部參考系統的情況下,面臨著同時定位和地圖構建( SLAM)問題。針對基于特征的視覺SLAM( VSLAM)算法構建的稀疏地圖不利于機器人應用的問題,提出一種基于八叉
2017-11-24 16:33:3423 近日比較引人關注的三星Exynos 9810處理器被傳會使用在三星即將推出上市的Galaxy S9和S9 +中。有人將三星Exynos 9810和高通驍龍845規格進行了比較,誰更有優勢?
2018-01-05 14:30:437277 高仙的SLAM2.0技術體系核心,是基于多傳感器融合+深度學習的架構,即語義SLAM。高仙SLAM2.0技術方案以語義分析、機器學習為基礎,結合云端實時信息處理以及專為多傳感器融合而開發的專業算法體系,真正實現了SLAM在建圖和導航兩個環節的完整應用。
2018-05-15 16:48:309729 要想解決機器人智能移動這個問題,除了要有SLAM技術之外,還需要加入路徑規劃和運動控制。在SLAM技術幫助機器人確定自身定位和構建地圖之后,進行一個叫做目標點導航的能力。
2018-08-26 10:04:5821999 SLAM(同步定位與地圖構建),是指運動物體根據傳感器的信息,一邊計算自身位置,一邊構建環境地圖的過程,解決機器人等在未知環境下運動時的定位與地圖構建問題。
2018-11-14 08:54:018299 增加,類似撞人、錯位、運行不穩定等問題頻頻出現。究其原因,機器人的導航定位正是此類問題出現的罪魁禍首。 機器人需要更具場景適用性的導航方案 提到機器人導航定位,很多人首先想到的便是激光雷達。激光雷達作為目前最成熟
2020-03-21 15:23:001339 通過以上分析可以得出,激光導航、視覺SLAM導航AGV相較于二維碼導航AGV運行更加靈活、維護成本更低、調度范圍更廣、定位精度更高。在制造業中,激光導航、視覺SLAM導航AGV以其鮮明的優勢,能夠更好滿足其需要。
2019-07-31 15:50:294857 在餐廳、酒店、商場等服務場所,我們已能看到一些自主行走的服務機器人,他們能做到自主路徑規劃、自動避開障礙物等功能,這主要得益于機器人定位導航技術的進步。在實現機器人導航方法中,目前主要有激光SLAM
2019-08-05 13:52:3011629 外形不同,但大多都具備行走能力,相對而言,帶有自主定位導航的服務機器人更受人們的青睞,通過激光導航或視覺導航等技術,機器人在無需人為操控的情況下也能實現自主行走。激光SLAM是機器人自主行走不可繞過
2019-08-07 19:29:142312 的激光雷達解決方案,而VSLAM主要是通過攝像頭來采集數據信息,跟激光雷達一對比,攝像頭的成本顯然要低很多。但激光雷達能更高精度的測出障礙點的角度和距離,方便定位導航。2.應用場景從應用場景來說
2019-08-09 17:31:201952 的激光雷達解決方案,而VSLAM主要是通過攝像頭來采集數據信息,跟激光雷達一對比,攝像頭的成本顯然要低很多。但激光雷達能更高精度的測出障礙點的角度和距離,方便定位導航。2.應用場景從應用場景來說
2019-09-11 22:01:352351 近年來,伴隨移動機器人在各行各業的廣泛應用,SLAM這個“名字”逐漸被更多的人所熟悉,但是SLAM具體是什么、SLAM有哪些應用領域、激光SLAM和視覺SLAM哪種方式更有優勢等等這些問題卻總是模糊不清。今天,小編就帶大家來詳細了解一下~
2020-01-18 17:43:003656 SLAM技術作為機器人自主移動的關鍵技術,讓很多人都誤解為:SLAM=機器人自主定位導航。
2020-03-30 10:39:113342 本文研究了基于多傳感器組合導航方法的SLAM,由于移動機器人無法通過單個傳感器得到可靠的信息,采用多傳感器組合導航的方法可以很好的解決這個問題。本文用單個CCD攝像頭和里程計組合進行SLAM研究
2020-08-07 17:14:0112 在業內,視覺SLAM與激光SLAM誰更勝一籌,誰將成為未來主流趨勢這一問題,成為大家關注的熱點,不同的人也有不同的看法及見解,以下將從成本、應用場景、地圖精度、易用性幾個方面來進行詳細闡述。
2020-08-28 14:53:3018830 
大家都知道,機器人智能移動(自主定位導航)包含了定位、建圖與路徑規劃。說到定位導航,必然會聯想到SLAM,但SLAM只是完成定位與地圖創建這兩件事,它并不完全等同于自主定位導航。 定位 不管你有沒有
2021-10-14 14:28:2711815 伴隨著技術的不斷革新,AGV導航方式也正朝著多樣化的趨勢發展。但真正成熟且規模化應用的,目前仍然只有傳統的磁條、二維碼及新興的激光導航等。 哪種導航方式是主流? 不同導航方式優缺點對比 磁條導航目前
2020-10-13 13:46:4610240 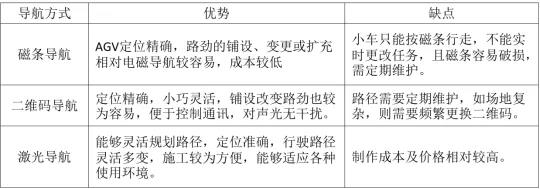
小型堆高式自動叉車SFL-CDD14 從其優勢特點可看出,兩者都是基于仙工智能(SEER)SRC核心控制器打造的激光SLAM自動叉車,與仙工智能(SEER)其他系列自動叉車相同,擁有卓越的性能。 適配
2020-10-09 14:53:112481 摘要 冠鴻智能本次提供的前段工序高精度AGV導航方式采用激光SLAM導航,舉升定位精度高達1mm,而目前行業內激光SLAM導航的AGV定位精度普遍在10mm。 動力電池產線對規模化、智能化、柔性化
2020-10-29 16:02:5513598 SLAM這個“名字”逐漸被更多的人所熟悉,但是SLAM具體是什么、SLAM有哪些應用領域、激光SLAM和視覺SLAM哪種方式更有優勢等等這些問題卻總是模糊不清。
2020-12-26 09:39:323746 定位技術是機器人實現自主定位導航的最基本環節,是機器人在二維工作環境中相對于全局坐標的位置及其本身的姿態。目前SLAM (Simultaneous Localization and Mapping即時定位與地圖構建)是業內主流的定位技術,有激光SLAM和視覺SLAM之分。
2020-12-26 10:59:432446 機器人領域 主要應用于機器人定位導航領域:地圖建模。 SLAM可以輔助機器人執行路徑規劃、自主探索、導航等任務。國內的科沃斯、塔米以及最新面世的嵐豹掃地機器人都可以通過用SLAM算法結合激光雷達或者攝像頭的方法,讓掃地機高效繪制室內地圖,智能分析和規劃掃地環境,從而成功讓自己步入了
2020-12-31 09:49:429048 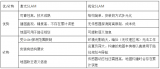
SFL-CBD20-S采用了目前最穩定最主流的導航方式——激光SLAM導航,無反光板,部署方便,內置仙工智能(SEER)SRC核心控制器,可提供地圖構建、定位、導航等基礎功能和多機調度、自動充電、3D 避障等功能,讓定位更精準,使運行更安全。
2021-02-04 16:43:562782 激光slam導航的優點是技術成熟,能夠靈活規劃路徑,定位精度高,行駛路徑靈活多變,施工較為方便。
2021-03-21 11:33:003019 ,使重釆樣后的粒子保持多樣性。結合似然域模型與意外對象觀測概率,使激光測量模型更好地反映真實環境。實驗結果表明,改進的重釆樣方法定位效果較好,相對原激光SLAM算法,改進的激光SLAM算法在動態環境中的建圖和定位精度更高。
2021-04-01 10:48:316 課題組已將該研究成果應用于智能駕駛即時定位與建圖(SLAM)任務中,提出了基于三維激光數據的層級式SLAM方法,實現了無GNSS環境下智能無人系統的高精度自主定位定姿,在智能駕駛國際著名公開數據集KITTI上排名全球第7(純激光SLAM算法中排名全球第4)。
2021-04-20 09:19:302744 
我看來,vslam得發展也就是從MonoSLAM->PTAM->圖優化SLAM->ORB-SLAM為代表的現代slam,其中可能還有許多內容,不過這些開源SLAM一定程度上體現了SLAM發展過程了....
2021-06-18 10:40:522071 
市面上AGV常用的三種導航方式:磁條導航、激光導航、slam導航。到底哪種導航方式的AGV好呢? 激光導航:地面無需其他定位設施,能夠適合多種現場環境,制造成本高,對環境要求相對較高(外界光線,地面
2021-12-21 17:14:425552 無人平臺在大范圍環境中 實現自 主定位與導航的能力 需求日 益嚴苛, 其中 基于激光雷達的同步定位和繪圖 技術(SLAM) 是主流的研究方案。 在這項工作中, 本文系統概述了 3D 激光雷達SLAM
2022-03-21 16:07:576148 相比柵格地圖,這種地圖看起來就不那么直觀了。它一般通過如GPS、UWB以及攝像頭配合稀疏方式的vSLAM算法產生,優點是相對數據存儲量和運算量比較小,多見于最早的SLAM算法中。
2022-09-21 15:30:481716 同時定位和映射(SLAM)是大多數自主系統所需的基本能力。在本文中,我們討論了基于自動駕駛汽車記錄的3D激光掃描的SLAM閉環問題。
2022-10-27 11:08:141716 近年來,基于視覺的傳感器在SLAM系統中顯示出顯著的性能、精度和效率提升。在這方面,視覺SLAM(VSLAM)方法是指使用相機進行姿態估計和地圖生成的SLAM方法。
2022-11-01 09:53:263476 庫執行立體視覺同步定位和繪圖(VSLAM),并估計立體視覺慣性測距。 在首次 Isaac ROS 線上研討會上,您將學習到如何使用 Isaac ROS Visual SLAM 進行測繪和機器人導航。 研討
2022-11-10 11:00:211646 (Visual SLAM,VSLAM)是將圖像作為主要環境感知信息源的SLAM系統,VSLAM以計算相機位姿為主要目標,通過多視幾何方法構建3D地圖[4]
2022-12-02 15:00:283030 深圳市不止技術有限公司是激光雷達行業頭部知名企業,團隊自2016年底就開始了多款激光雷達方案的研發,并創造了30多件發明專利,我們作為激光雷達行業5年多的資深老兵,對激光雷達有著深厚的技術積累
2022-02-08 14:56:414344 
視覺紋理導航,亦稱Visual SLAM導航,通過自動導引車車載視覺傳感器獲取運行區域周的圖像信息來實現導航的方法。視覺導航是以地面紋理為特征信息的視覺導航AGV
深圳市不止技術有限公司是激光
2022-04-29 10:01:034817 
正如圖中所示,機器人自主定位導航技術中包括:定位和地圖創建(SLAM)與路徑規劃和運動控制兩個部分,而SLAM本身只是完成機器人的定位和地圖創建,二者有所區別。
2023-08-03 11:12:001660 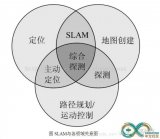
激光雷達導航是通過360度旋轉雷達對周圍10米以內平面空間進行掃描,并生成平面地圖;根據雷達掃描出來的平面地圖結合碰撞、沿墻等不同的傳感器取得的數據來進行自主定位、導航、路徑規劃等SLAM算法。
2021-11-17 10:10:251864 
近年來,SLAM技術取得了驚人的發展,領先一步的激光SLAM已成熟的應用于各大場景中,視覺SLAM雖在落地應用上不及激光SLAM,但也是目前研究的一大熱點,今天我們就來詳細聊聊視覺SLAM的那些事兒。
2023-09-05 09:31:115453 
? 前言 Athena 2.0是思嵐研發的搭載全新的SLAM自主定位導航系統及激光視覺多重導航方案,能夠自主上下電梯,實現多樓層之間自主移動的智能機器人底盤。 Athena2.0智能機器人底盤,自
2023-10-13 09:21:321958 中強光智能自主研發的3D激光SLAM無人叉車KSRB1425由智能3D激光導航出發,結合視覺及多項感知融合技術,搭配先進的演算能力,實現智能化精準運動
2023-11-10 15:59:171607 什么是激光雷達3DSLAM?在了解這個概念之前,我們首先需要弄懂什么是“SLAM”。SLAM,英文是SimultaneousLocalizationandMapping,意思是即時定位與建圖。通俗
2023-11-25 08:23:572281 
激光 SLAM 任務是搭載激光雷達的主體于運動中估計自身的位姿,同時建立周圍的環境地圖。而準確的定位需要精確的地圖,精確的地圖則來自于準確的定位,定位側重自身位姿估計,建圖側重外部環境重建。
2024-03-04 11:25:041756 
勞動力成本上漲和消費者對產品質量要求的提高,推動傳統制造業向高效、靈活的生產模式轉型。激光AGV作為智能化物流解決方案,通過激光SLAM導航技術實現自主定位與導航,省去部署軌道的麻煩,提高工作效率并
2024-04-24 17:50:301087 
和效率的關鍵手段。本文將探討激光焊接視覺定位引導方法的基本原理、技術實現及其在實際應用中的優勢和挑戰。 視覺定位引導的基本原理 視覺定位引導是利用計算機視覺技術對焊接工件進行識別、定位和引導,從而實現精確焊接的
2024-05-28 10:34:111262 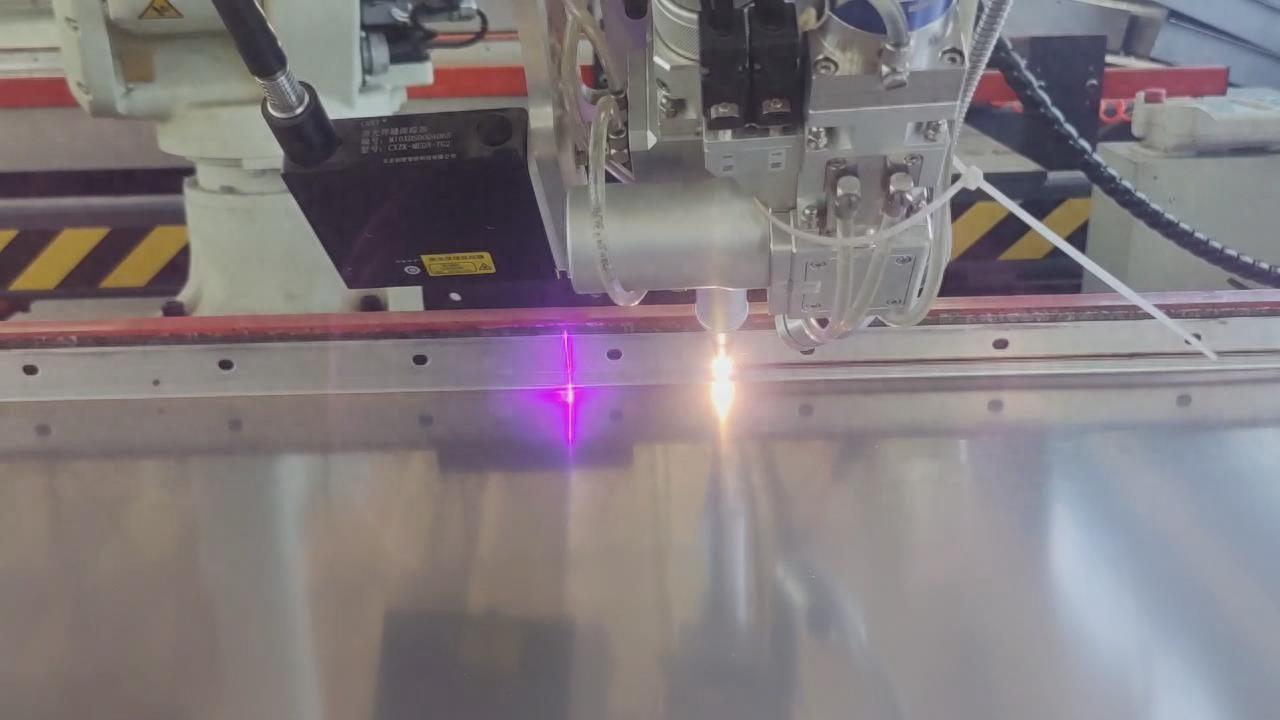
應運而生,其中藍牙導航定位技術因其獨特的優勢而備受關注。 藍牙導航定位技術主要依賴于藍牙信號在室內環境中的傳播特性。通過在室內布置一定數量的藍牙信標(beacon),這些信標會定期發出包含自身位置信息的藍牙信號。當用戶的移
2024-06-27 11:09:041109 在錯綜復雜的室內環境中,精準導航一直是用戶與管理者共同面臨的難題。隨著科技的進步,室內藍牙導航定位技術應運而生,以其獨特的優勢正逐步改變這一現狀。本文就由滄穹給大家具體介紹一下室內藍牙導航定位技術應用優勢。
2024-08-29 11:50:20996 AGV是制造物流重要設備,激光導航AGV高可靠靈活,SLAM技術關鍵,激光SLAM成熟且落地豐富,無需人工標志物,復合式激光導航兼顧可靠性與靈活性,激光導航結合內部傳感器提升導航質量。
2024-11-06 11:51:331222 
一、文章概述 1.1 摘 要 即時定位與地圖構建(simultaneous localization and mapping,SLAM)是自主移動機器人和自動駕駛的關鍵 技術之一,而激光雷達則是支撐
2024-11-12 10:30:253458 
同時定位與地圖構建(SLAM)是一項關鍵技術,允許移動機器人在部分或完全未知的環境中自主導航。它包括使用機載傳感器同時估計機器人狀態和構建傳感器檢測到的環境地圖。SLAM可以根據傳感器和地圖構建技術
2024-11-12 11:26:391751 
AGV是自動導引運輸車,激光導航AGV具有高可靠性和柔性,需存儲完整地圖信息。地圖構建重要,激光導航結合新導航方式可提高精度。未來激光導航AGV將多樣化、靈活,便于使用維護。
2024-11-26 17:55:091454 
激光焊接是一種高效的焊接技術,通過高強度激光束將兩個材料表面加熱至熔化點,并將其熔化融合在一起。與傳統焊接方法(如弧焊、氣焊)相比,激光焊接具有一些獨特的優勢和特點。130+7094*0762=店化
2024-12-01 22:47:071664 
本文提出了一種新方法,通過使用點到平面匹配將VIO/VSLAM系統生成的稀疏3D點云與數字孿生體進行對齊,從而實現精確且全球一致的定位,無需視覺數據關聯。所提方法為VIO/VSLAM系統提供了緊密
2024-12-13 11:18:151265 
AGV地牛小巧靈活,載重大,采用激光SLAM導航,可智能控制路線。支持定制化云平臺監控,多級安全措施保障安全。適用于多行業倉儲物流,提高搬運效率,降低人力投入。
2025-02-11 17:56:36757 
廠家-自動化叉車-智能搬運碼垛機器人-智能叉車系統解決方案專家 一、導航技術 激光導航技術 激光SLAM導航 :這是目前應用較為廣泛的導航技術之一。聯核科技無人叉車用的就是這項導航技術。AGV無人叉車通過激光雷達掃描周圍環境,構建出廠房四周環境的
2025-03-28 16:09:40814 
 電子發燒友App
電子發燒友App








 工商網監
工商網監
評論