 SLAM還是存在許多開放性的問題
SLAM還是存在許多開放性的問題

又到了每周組會的時間了,這周主要是收集了現在領域當中SLAM存在的一些開放性問題以及在學習SLAM14講。
之前說要做SLAM,實際上連SLAM現在發展得怎么樣,有什么瓶頸,目前有什么已經落地的產品實際上都不了解,所以這一周除了上課的時間(PS:課是真的多,我說我周一6節,周二4節,周三六節,周四兩節,周五4節,還有一大堆作業,這學期的作業還一大堆仿真題,現代數字信號處理有點難啊。留給科研的時間不多了)。
在收集資料的過程當中,也認識了好多大牛,先整理一波材料的來源:
會議:
論文:
[1]Past, Present, and Future of Simultaneous Localization And Mapping: Towards the Robust-Perception Age
[2]The SLAM problem: a survey
[3]Simultaneous Localization and Mapping : A Survey of Current Trends in Autonomous Driving(未看,IEEE Transactions on intelligent vehicles)
[4]A Survey of the State-of-the-Art Localization Techniques and Their Potentials for Autonomous Vehicle Applications
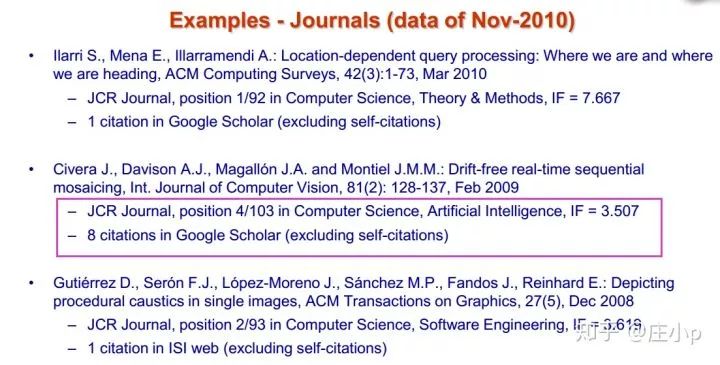
(聽說列了論文不列出來哪個會議,屬于哪個類就是耍流氓,先耍以下流氓,下次看的論文會附上),例如這個樣子:
工作坊
ICCV Workshop (Workshop的東西短小精悍)
實驗室
慕尼黑工業大學(TUM),麻省理工大學(MIT),帝國理工大學(IDG),卡內基-梅隆大學(CMU),德國弗萊堡大學(Freiburg) , 西班牙薩拉戈薩大學(Zaragoza)
從閱讀的內容來看,包括了講解SLAM這30年的發展歷史,以及視覺SLAM的15年,接下來又拋出一些開放性問題等待各位工作于SLAM人士的智慧來解決。
John Leonard 大神從這30年的文章中,每年選取一兩篇具有代表性的文章,或者產品,或者書籍,來描述SLAM的發展,讓我們開始把
1999 A Solution to the Simultaneous Localization and Map Building Problem(Dissayanake,Newman,etal.)
1999 Loop-Closing – Gutmann and Konolige
2000 Probabilistic Algorithms and the Interactive Museum Tour-Guide Robot Minerva – Thrun et al
2001 Optimization of the Simultaneous Localization and Map Building Algorithm for Real Time Implemention (Guivant and Nebot)
2002 Real-time SLAM using laser Paul Newman (ICRA 2002) MIT 這個機器人看起來已經實現了室內定位
2002 Montemerlo and Thrun, FastSLAM (FastSLAM: A Factored Solution to the Simultaneous Localization and Mapping Problem, AAAI 2002 )
2003 An Atlas Framework for Scalable Mapping (Bosse) ICRA
2004 Vision-based SLAM using Poses and Images (Ryan Eustice and Hanu Singh) 做導航船的,相機做約束
2005 Probablistic ROBOTICS Thrun, Burgard and Fox, MIT Press
2006 Smoothing and Mapping(SAM)因子圖要誕生了,剛下載了他們程序,想下周看看
2007 A Tree Parameterization for Efficiently Computing Maximum Likelihood Maps using Gradient Descent (沒看懂他的重要) rss2007
2007 Parallel Tracking and Mapping (PTAM)Klein and Murray 【ISMAR最佳論文獎】 2015年的ORB-SLAM前身
2008 FrameSLAM: From Bundle Adjustment to Real-Time Visual Mapping (Konolige and Agarwal)
2009 FAB-MAP: Probabilistic Localization and Mapping in the Space of Appearance Mark Cumminsb and Paul Newman (這個之后再看看是啥)
2010 Sibley et al. – Relative Bundle Adjustment/VSLAM
2011 KinectFusion – Izadi, Necombe et al.
2012 KinLnuous (Whelan, McDonald et al.) Extension pf KincectFusion (RSS 2012 RGB-D Workshop)
2013 SLAM++ CVPR2013最佳論文好像
2013 KinLnous Processing Pipeline (“Cloud Slices” connected to pose graph SLAM optimization) 這個后面可以看下
2014 Google Tango - Journey Pollefeys et al.(之前聽老師講有創業公司想做這種視覺手持SLAM,然后還要拿得直力拿著,這兩天看到Tan‘go,想著這不久是Tango嘛,而且Tango還可以晃動呢)
2015 Kintinuous with Stereo – Walking over Stairs
我看來,vslam得發展也就是從MonoSLAM-》PTAM-》圖優化SLAM-》ORB-SLAM為代表的現代slam,其中可能還有許多內容,不過這些開源SLAM一定程度上體現了SLAM發展過程了。..。
關于SLAM是否被解決,如果是針對某一場景,特定的任務,可以說SLAM已經被解決,但是如果我們是說任何環境,那么SLAM還是存在許多開放性的問題的。
vSLAM 現有的產品有:Google Tango ,Microsoft HoloLens, ARKit,ARCODE等等
vSLAM現在存在的問題有:
Life-long SLAM(如何實現長距離的SLAM呢)
Map Representation (地圖應該怎么表示,畢竟計算資源有限)
Large-Scale(特征和超大地圖怎么進行匹配)
多機SLAM(如果要探索一塊區域,多個機器人繪制的地圖如何形成全局一致性地圖呢)
對于vslam,會存在這些問題,光照變化,天氣情況,以及季節變化,導致路面情況發生很大的變化,如果這時候做特征匹配的話,就會失敗。目前的解決方案有SeqSLAM-》Fast SeqSLAM -》Semantic Enhanced SLAM
以上大概就是SLAM領域中開放的問題的。
哎,今天說了這些問題,老師問那你想做哪個問題,我還真的懵逼了,我也不太清楚,本來只是想做了傳感器融合水以下論文的,不過老師好像要我們能夠解決這個領域中的某個特定的問題,現在也還沒想法,噗噗噗,感覺都挺難的。結合New傳感器,其實效果也不一定會提升,水水水~~~
提問:如果是你的話,你會怎么處理這些問題呢?
想法是:先把圖像進行增強,然后再做特征匹配。對于有霧的情況,先進行去霧再進行匹配,去霧算法好像何凱明有篇論文做的效果非常好。這些開放性的問題值得我們平時沒事就思考思考。
責任編輯:lq
-
圖像
+關注
關注
2文章
1096瀏覽量
42326 -
開源
+關注
關注
3文章
4203瀏覽量
46128 -
SLAM
+關注
關注
24文章
457瀏覽量
33324
原文標題:探討 | 目前SLAM存在的問題
文章出處:【微信號:vision263com,微信公眾號:新機器視覺】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
什么是激光雷達 3D SLAM技術?

調用拼多多開放平臺 API 獲取店鋪列表

FPGA和GPU加速的視覺SLAM系統中特征檢測器研究

醫用氣腹機多級壓力監控的理想解決方案:TE M3031壓力傳感器

全新輕量級ViSTA-SLAM系統介紹

一種適用于動態環境的自適應先驗場景-對象SLAM框架

基于深度學習的增強版ORB-SLAM3詳解

基于CODESYS的自動化控制系統,開放架構 × 高度集成 × 遠程運維

一種適用于動態環境的實時RGB-D SLAM系統

三維高斯潑濺大規模視覺SLAM系統解析

工業物聯網平臺的開放性體現在哪方面
廣成科技Profinet IO設備的應用場景
【「# ROS 2智能機器人開發實踐」閱讀體驗】視覺實現的基礎算法的應用
一種基于點、線和消失點特征的單目SLAM系統設計




 工商網監
工商網監
評論