1、一個四則運(yùn)算的簡單回調(diào)函數(shù)例子:
#include
#include
/****************************************
* 函數(shù)指針結(jié)構(gòu)體
2025-12-11 07:23:49
int Callback_1(int a)///< 回調(diào)函數(shù)1
{
printf(\"Hello, this is Callback_1: a = %d \"
2025-12-11 06:22:35
有沒有哪位大佬能提供一下思路,遇到一個問題matlab得不到神經(jīng)網(wǎng)絡(luò)fitcnet模型的權(quán)重參數(shù),所以simulink沒辦法部署,那遇到這種情況該如何處理
2025-12-08 15:27:21
PID控制器在電機(jī)控制中起著關(guān)鍵作用。如何根據(jù)電機(jī)的特性和應(yīng)用需求調(diào)整PID控制器的參數(shù)(如比例系數(shù)、積分系數(shù)和微分系數(shù)),以實(shí)現(xiàn)快速響應(yīng)和減少超調(diào)?
2025-12-08 06:15:21
變頻器內(nèi)置PID控制參數(shù)是工業(yè)自動化領(lǐng)域中實(shí)現(xiàn)精確控制的核心要素,其合理配置直接影響電機(jī)調(diào)速、壓力調(diào)節(jié)、溫度控制等過程的穩(wěn)定性和響應(yīng)速度。要深入理解這些參數(shù)的含義,需從PID控制原理、參數(shù)功能及實(shí)際
2025-12-06 07:39:46 1512
1512 ) 周圍抖動
在講了PI和PD系統(tǒng)的調(diào)節(jié)方式后,下面分享一下PID系統(tǒng)的調(diào)節(jié)方式,首先我們先按照PI系統(tǒng)進(jìn)行調(diào)節(jié),先調(diào)P在調(diào)I,讓系統(tǒng)有一定的過沖后達(dá)到穩(wěn)定.
在出現(xiàn)了上面的 PI 波形之后,下面就開始調(diào)節(jié)D,慢慢增加D,將過沖補(bǔ)償?shù)簦钡较到y(tǒng)穩(wěn)定,最終效果如下圖,PID系統(tǒng)就基本調(diào)節(jié)完成了
2025-11-28 07:17:28
? HJ-55015三相智能程控變頻電源作為電力電子領(lǐng)域的精密設(shè)備,其電壓可分調(diào)與統(tǒng)調(diào)功能堪稱工業(yè)電源設(shè)計(jì)的典范之作。該設(shè)備采用先進(jìn)的數(shù)字信號處理技術(shù),猶如一位技藝精湛的指揮家,能夠精準(zhǔn)調(diào)控三相
2025-11-04 13:13:01172 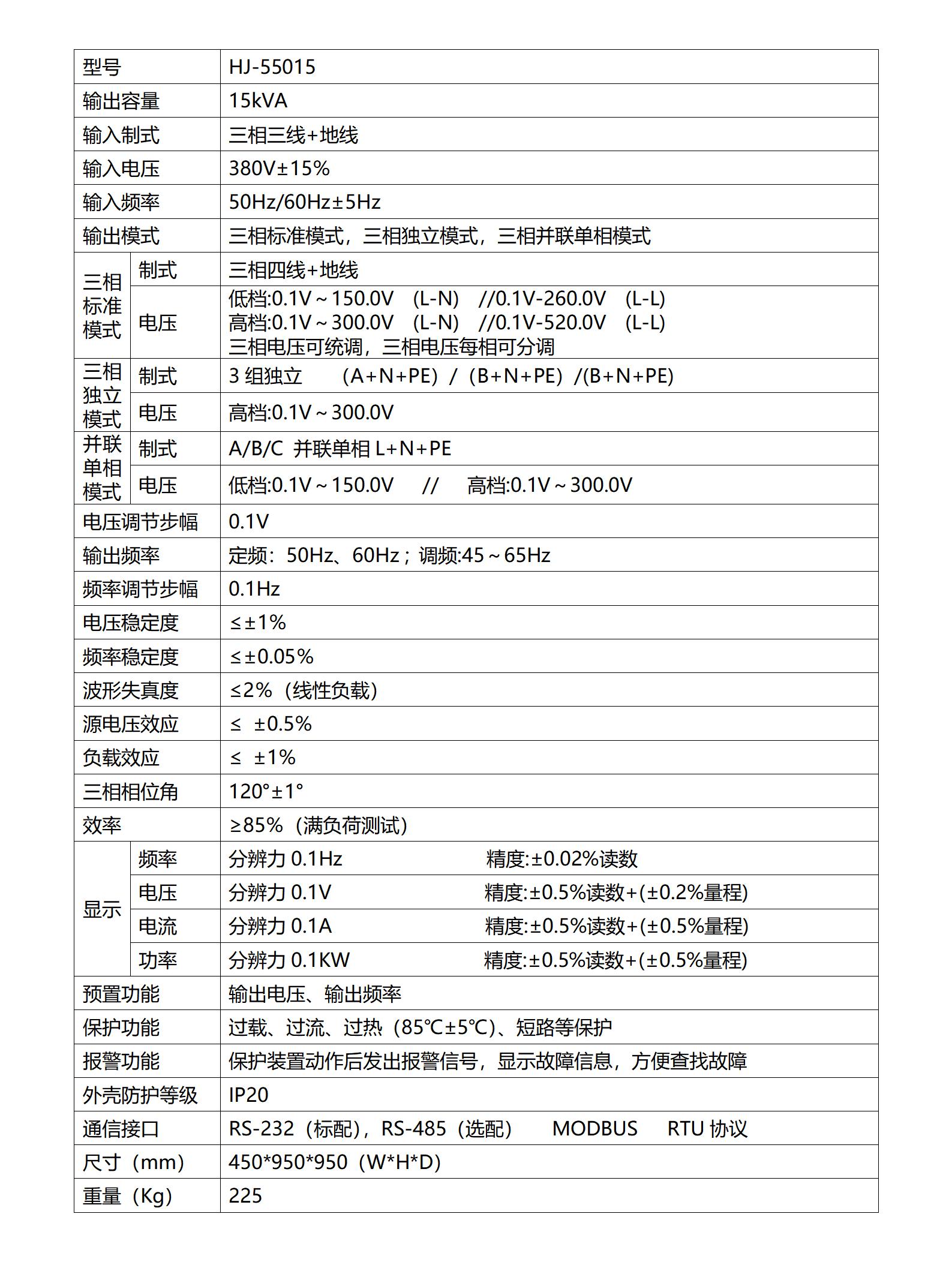
[首發(fā)于智駕最前沿微信公眾號]在談及自動駕駛時,有些方案中會提到“強(qiáng)化學(xué)習(xí)(Reinforcement Learning,簡稱RL)”,強(qiáng)化學(xué)習(xí)是一類讓機(jī)器通過試錯來學(xué)會做決策的技術(shù)。簡單理解
2025-10-23 09:00:37474 
Aerodiode激光PID伺服控制器產(chǎn)品圖 Aerodiode的超高帶寬激光鎖定PID控制器能夠動態(tài)最小化系統(tǒng)信號與目標(biāo)設(shè)定值之間的差異。適用于高帶寬低噪聲PID校正,例如激光鎖相和激光線寬壓縮
2025-10-22 07:48:51265 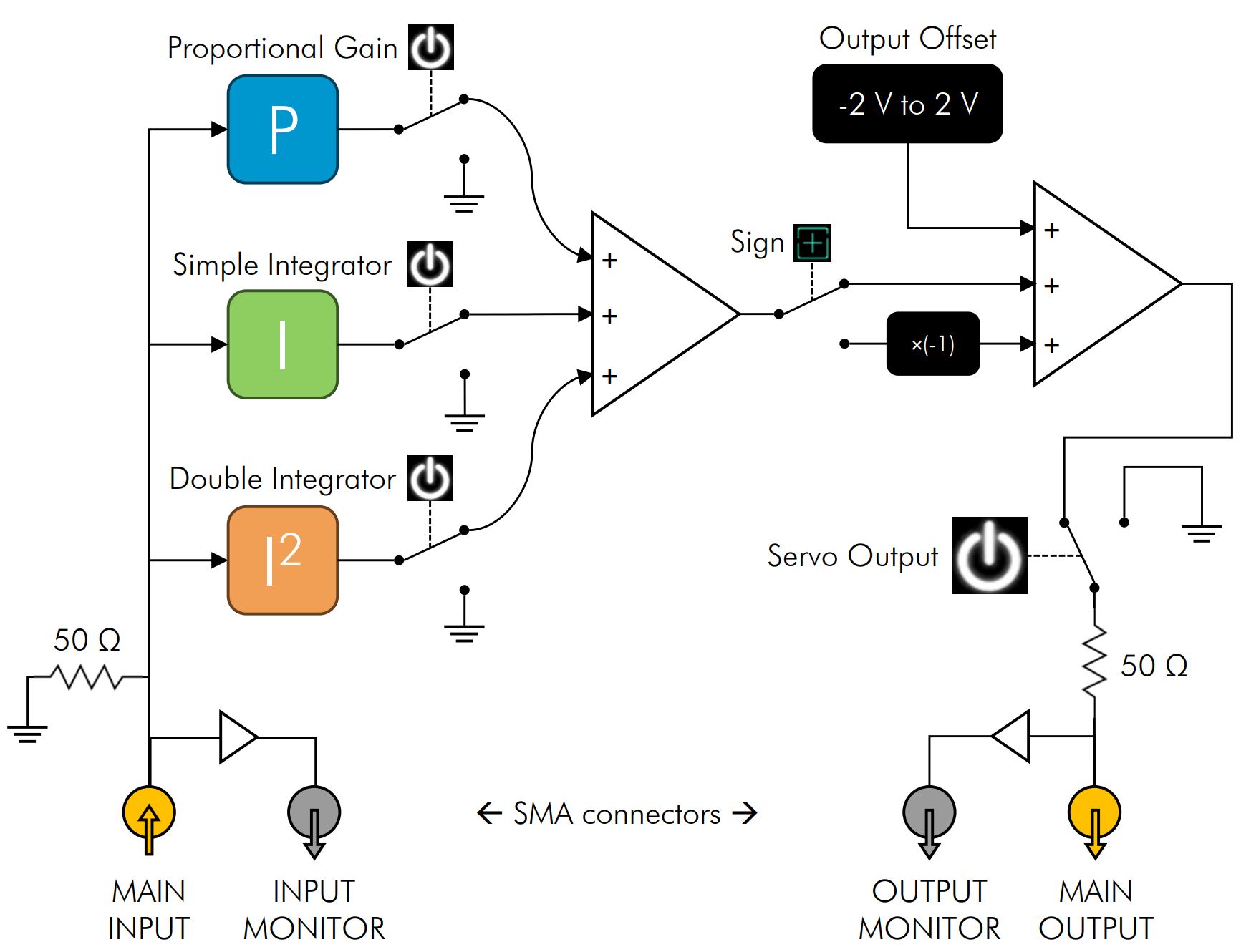
引言
想要實(shí)現(xiàn)浮點(diǎn)運(yùn)算功能,如果自己寫Verilog代碼,需要花費(fèi)較多的時間和精力。好在Simulink HDL Coder工具箱提供了自動代碼生成技術(shù)。下圖展示了HDL Coder如何生成浮點(diǎn)運(yùn)算
2025-10-22 06:48:48
將偏差的比例(Proportion)、積分(Integral)和微分(Differential)通過線性組合構(gòu)成控制量,用這一控制量對被控對象進(jìn)行控制,這樣的控制器稱PID控制器。在社區(qū)開源
2025-09-30 11:44:432312 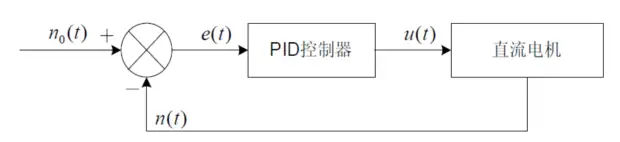
在simulink里面是否有每相都帶負(fù)端的三相變壓器,最近做HDT的仿真,simulink里面的三相變壓器好像都沒有負(fù)端,怎么才能用三相變壓器像圖中這樣連接?
2025-09-24 09:05:44
電子發(fā)燒友網(wǎng)報(bào)道(文/李彎彎)樂鑫在最新的財(cái)報(bào)中表示,公司ESP32-S系列自ESP32-S3芯片開始,強(qiáng)化了邊緣AI方向的應(yīng)用。ESP32-S3芯片增加了用于加速神經(jīng)網(wǎng)絡(luò)計(jì)算和信號處理等工作
2025-09-09 09:20:277152 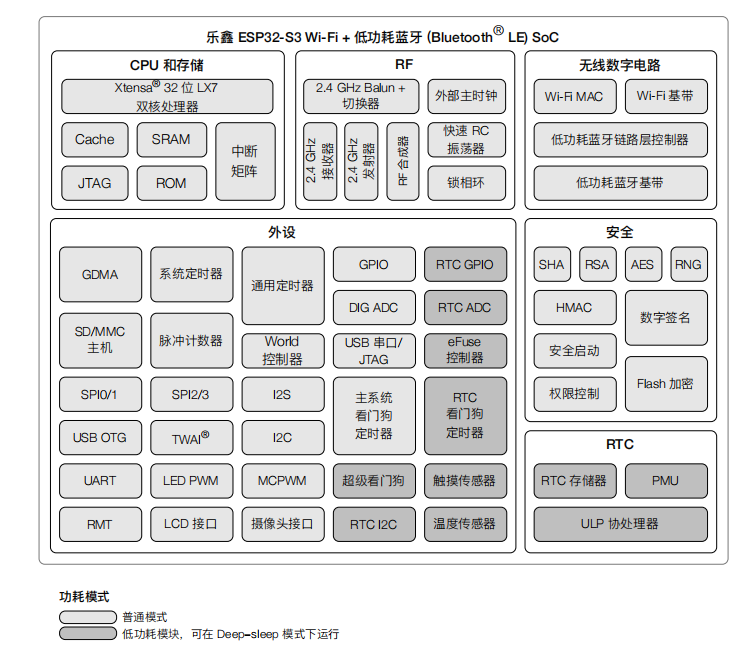
提供一個歐美標(biāo)充電模型,交付物為白盒Simulink模型
2025-09-04 16:23:17
DevEco Studio提供智慧調(diào)優(yōu)能力,支持通過自然語言交互,分析并解釋當(dāng)前實(shí)例或項(xiàng)目中存在的性能問題,幫助開發(fā)者快速定位影響性能的具體原因。該功能從DevEco Studio 6.0.0
2025-09-01 15:15:18
無人機(jī)電調(diào)面臨的難題無人機(jī)電子調(diào)速器(電調(diào))是連接飛控系統(tǒng)與動力電機(jī)的核心樞紐,承擔(dān)著將電池直流電能高效轉(zhuǎn)換為三相交流電機(jī)所需能量的關(guān)鍵任務(wù)。其性能直接決定了無人機(jī)的響應(yīng)速度、飛行穩(wěn)定性及動力輸出
2025-09-01 09:56:27512 
on_screen_change回調(diào)函數(shù)使用指南
2025-08-31 16:32:49708 
回調(diào)函數(shù)使用指南
2025-08-31 16:25:10715 
DevEco Studio提供智慧調(diào)優(yōu)能力,支持通過自然語言交互,分析并解釋當(dāng)前實(shí)例或項(xiàng)目中存在的性能問題,幫助開發(fā)者快速定位影響性能的具體原因。該功能從DevEco Studio 6.0.0
2025-08-14 11:12:23
電子發(fā)燒友網(wǎng)站提供《溫度位元式控制系統(tǒng)與連續(xù)的PID控制系統(tǒng)的區(qū)別.pdf》資料免費(fèi)下載
2025-08-13 15:54:32 1
1 Sn-Bi-Ag低溫錫膏的晶界強(qiáng)化機(jī)制是一個多因素協(xié)同作用的過程,以下從各機(jī)制的具體作用、研究案例及數(shù)據(jù)支持、協(xié)同效應(yīng)三個角度進(jìn)行詳細(xì)闡述:
2025-08-13 09:08:21465 用于新手學(xué)習(xí)PID控制算法。
2025-08-12 16:22:577 在高并發(fā)微服務(wù)環(huán)境中,網(wǎng)絡(luò)性能往往成為K8s集群的瓶頸。本文將深入探討如何通過精細(xì)化的Linux內(nèi)核參數(shù)調(diào)優(yōu),讓你的K8s節(jié)點(diǎn)網(wǎng)絡(luò)性能提升30%以上。
2025-08-06 17:50:46803 關(guān)鍵要點(diǎn)預(yù)覽:本文將深入解析Linux系統(tǒng)性能瓶頸的根本原因,提供可直接落地的調(diào)優(yōu)方案,讓你的系統(tǒng)性能提升30-50%!
2025-08-06 17:49:16701 由于永磁同步直線電機(jī)(PMLSM)在運(yùn)行過程中存在著參數(shù)變動和負(fù)載干擾等問題,因此傳統(tǒng)PID控制器無法滿足高精度伺服控制系統(tǒng)的要求。針對以上問題,提出一種基于粒子群參數(shù)全局尋優(yōu)的在線自整定PID
2025-08-05 14:20:39
上個月,我們公司的核心業(yè)務(wù)系統(tǒng)突然出現(xiàn)大面積超時,用戶投訴電話不斷。經(jīng)過緊急排查,發(fā)現(xiàn)是MySQL服務(wù)器CPU飆升到99%,大量慢查詢堆積。通過一系列配置調(diào)優(yōu)和SQL優(yōu)化,最終在30分鐘內(nèi)恢復(fù)了服務(wù)。
2025-07-31 10:27:46472 在電力與電氣設(shè)備的運(yùn)行過程中,電壓的穩(wěn)定至關(guān)重要。自動調(diào)壓器作為一種關(guān)鍵設(shè)備,能夠有效調(diào)節(jié)電壓,確保設(shè)備在合適的電壓環(huán)境下運(yùn)行。而在自動調(diào)壓器(穩(wěn)壓器)的應(yīng)用中,分調(diào)與統(tǒng)調(diào)是兩種常見的調(diào)節(jié)模式。理解
2025-07-26 14:54:10768 在卸載了2345安全衛(wèi)士之后,電腦就突然黑屏死機(jī),然后再打開電腦,打開simulink后會有照片里的彈窗,就會退出MATLAB,之后再打開simulink只要運(yùn)行就會死機(jī),怎么解決(求高手解疑)
2025-07-24 17:11:38
一、適合范圍本文檔適用于VisualHMI平臺,Lua腳本語言為V5.3版本,配合工程可以完成大部分的內(nèi)部邏輯處理。二、概述on_press(state,x,y)觸摸回調(diào)函數(shù),當(dāng)帶觸摸的串口屏,點(diǎn)擊
2025-07-23 16:32:011025 
一、適合范圍本文檔適用于VisualHMI平臺,Lua腳本語言為V5.3版本,配合工程可以完成大部分的內(nèi)部邏輯處理。二、概述on_run(screen)周期回調(diào)函數(shù),用該回調(diào)函數(shù),會根據(jù)設(shè)定的時間
2025-07-23 15:25:44990 
【摘要】建立了線控轉(zhuǎn)向系統(tǒng)機(jī)械路感模擬和直流無刷電機(jī)的數(shù)學(xué)模型。針對線控轉(zhuǎn)向系統(tǒng)需要直流無刷電機(jī)響應(yīng)快、魯性高的要求,采用雙閉環(huán)控制策略,其中電流環(huán)采用PID控制,轉(zhuǎn)角環(huán)采用滑膜變結(jié)構(gòu)控制。通過
2025-07-15 15:22:48
Nginx作為現(xiàn)代互聯(lián)網(wǎng)架構(gòu)中最重要的Web服務(wù)器和反向代理服務(wù)器,其性能調(diào)優(yōu)對企業(yè)級應(yīng)用的穩(wěn)定性和效率至關(guān)重要。本指南將從運(yùn)維實(shí)踐角度出發(fā),詳細(xì)介紹Nginx在企業(yè)環(huán)境中的各種調(diào)優(yōu)策略和最佳實(shí)踐。
2025-07-14 11:13:35491 AMD Power Design Manager 2025.1 版(PDM)現(xiàn)已推出——增加了對第二代 AMD Versal AI Edge 和 第二代 Versal Prime 系列的支持,并支持已量產(chǎn)的 AMD Spartan UltraScale+ 系列。
2025-07-09 14:33:00983 摘要:針對無刷直流電機(jī)傳統(tǒng)PID控制存在精度低、抗于抗能力差及模糊控制穩(wěn)態(tài)精度不高等問題,研究了一種自適應(yīng)模糊PID控制方法。論文分析了直流無刷電機(jī)的工作原理,建立了直流無刷電機(jī)自適應(yīng)模期PID
2025-07-09 14:18:57
共同建文了無刷直流電動機(jī)模糊自適應(yīng)PID控制的仿真模型,充分發(fā)揮了PSIM和MATLAB/Simulink各自在仿真方面的優(yōu)勢,簡化了建立仿真模型的過程。仿真結(jié)果表明,采用模糊PID集成控制算法能夠使
2025-07-07 18:29:15
2025 年 7 月 2 日 – 專注于引入新品的全球電子元器件和工業(yè)自動化產(chǎn)品授權(quán)代理商貿(mào)澤電子 (Mouser Electronics) 即日起開售英飛凌的PSOC? Control C3
2025-07-03 10:39:031720 PID3個參數(shù)的自適應(yīng)。采用分段線性化方法建立BLDCM反電動勢梯形波,采用環(huán)電流控制器實(shí)現(xiàn)電流調(diào)節(jié),并在Matab/Simulink仿真平臺上搭建仿真模型,結(jié)果表明智能PID控制效果和魯棒性皆優(yōu)于
2025-06-26 13:36:55
跟蹤最終位置過程的不確定性和傳統(tǒng)PID控制器超調(diào)量大,調(diào)節(jié)時間長的缺點(diǎn),設(shè)計(jì)了Fuzzy-LQR-PD控制算法來提高位置跟蹤精度,通過Matlab軟件對該算法進(jìn)行仿真,并由STEP7編程軟件編寫程序在
2025-06-23 07:07:30
摘 要:為提高發(fā)電機(jī)勛磁控制系統(tǒng)的穩(wěn)定性,分析了同步發(fā)電機(jī)的自并勵勵磁系統(tǒng)的結(jié)構(gòu)和數(shù)學(xué)模型,介紹了神經(jīng)網(wǎng)絡(luò)預(yù)測控制的結(jié)構(gòu)和算法,分別基于PID控制、神經(jīng)網(wǎng)絡(luò)預(yù)測控制和神經(jīng)網(wǎng)絡(luò)預(yù)測-PID申級控制算法
2025-06-16 21:56:02
數(shù)學(xué)模型,并通過 Matlab Simulink 搭建了仿真模型。提出了使用增量式PID控制算法實(shí)現(xiàn)電機(jī)的恒速控制,并進(jìn)行了仿真,最后,利用STC89C52將PID控制與BIDCM結(jié)合在一起,通過實(shí)驗(yàn)
2025-06-16 21:53:07
坐標(biāo)系(M-T)下三相異步電機(jī)的數(shù)學(xué)模型、應(yīng)用SIMULINK建立了仿真模型及其中的電壓轉(zhuǎn)換模塊、電流轉(zhuǎn)換模塊、U/1轉(zhuǎn)換模塊.仿真實(shí)例驗(yàn)證了仿真模型的有效性。
純分享帖,需要者可點(diǎn)擊附件免費(fèi)獲取完整資料
2025-06-16 21:48:52
采用粒子優(yōu)化算法進(jìn)行PID模糊控制訓(xùn)練能提高永磁同步電機(jī)的控制精度,提出一種基于改進(jìn)粒子群算法的永磁同步電機(jī) PID控制方法,構(gòu)建永磁同步電機(jī)PD模糊控制目標(biāo)畫數(shù),選擇電壓、轉(zhuǎn)矩、速度和電磁損耗等
2025-05-28 15:44:44
通過分析學(xué)習(xí)速率對BP算法的影響,提出一種分層調(diào)整學(xué)習(xí)速率的改進(jìn)BP 網(wǎng)絡(luò)算法,并把該方法設(shè)計(jì)成 PID控制器應(yīng)用在無刷直流電機(jī)控制系統(tǒng)中,仿真結(jié)果驗(yàn)證了基于改進(jìn)的 BP 網(wǎng)絡(luò)的PID控制器
2025-05-28 15:42:21
在安裝驅(qū)動的時候,默認(rèn)的pid變成了pid_00bc,不再是默認(rèn)的pid_00f3,如何改回默認(rèn)的pid_00f3呢?
2025-05-21 06:25:54
你好,我正在嘗試編寫自己的自定義設(shè)置回調(diào)函數(shù),并使用 fastEnum=false。
是否有任何代碼示例或資料可供我參考?
void CyU3PUsbRegisterSetupCallback
2025-05-21 06:11:55
本文講述了如何使用 One Spin 檢查 AMD Vivado Design Suite Synth 的結(jié)果(以 Vivado 2024.2 為例)。
2025-05-19 14:22:261111 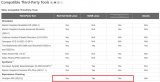
整車熱控制,MATLAB 和 Simulink 正以創(chuàng)新工具助力全球企業(yè)突破技術(shù)瓶頸,為綠色出行提供可靠保障。
2025-05-14 14:22:24629 
傳統(tǒng)PID問題
改進(jìn)方案
大滯后系統(tǒng)(如工業(yè)鍋爐)
響應(yīng)延遲導(dǎo)致超調(diào)
Smith預(yù)估控制
非線性系統(tǒng)(如機(jī)械臂)
參數(shù)難以整定
模糊PID
強(qiáng)干擾環(huán)境
常規(guī)PID波動大
加入前饋控制
對于電烙鐵這種存在熱傳導(dǎo)延遲的系統(tǒng),微分項(xiàng)的濾波處理和動態(tài)調(diào)整積分限幅是保證控制精度的關(guān)鍵。
2025-05-14 12:51:52
大家好,因?yàn)槭堑谝淮谓佑|pid,我想問一下為什么我不管怎么調(diào)整直立環(huán)的Kp值都不能讓小車能夠立起來,總是往一邊貼地滑行或者原地轉(zhuǎn)圈,扶正也沒辦法起立,求各位大佬能講講一些思路幫助,這個參數(shù)我調(diào)了半天了好痛苦,車子都要撞壞了??謝謝大家
2025-05-06 00:44:41
電子設(shè)計(jì)自動化(EDA)工具的演進(jìn)趨勢是借助先進(jìn)的自動化技術(shù),提升設(shè)計(jì)效率與質(zhì)量,AI(人工智能)和ML(機(jī)器學(xué)習(xí))技術(shù)的融入,進(jìn)一步強(qiáng)化了這一特性。
2025-04-16 10:45:331213 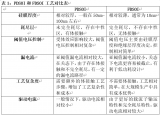
回調(diào)函數(shù)是C語言里面一個重要機(jī)制。
2025-04-15 10:11:11684 安裝 Windows 版本的 S32Design Studio 并構(gòu)建我們的項(xiàng)目時,發(fā)生以下錯誤。
-----
make -j12 全部
1 [main] make 1916 dofork:子進(jìn)程
2025-04-11 07:05:32
我想熟悉如何實(shí)現(xiàn)MC33774IC 在 Simulink 環(huán)境中使用基于模型的設(shè)計(jì)。
盡管 MATLAB 提供了一些示例文件,但它們似乎是最終版本。要更深入地了解如何配置MC33774,我正在尋找一個教程,該教程解釋了如何從頭開始在 Simulink 中設(shè)置和添加必要的模塊。
2025-04-10 08:05:34
我想學(xué)一下pid仿真和pid模糊控制,雖然網(wǎng)上有教程,但我自己調(diào)試的時候,很多參數(shù)不太明白,調(diào)不出來,誰能教教我,可以有償
2025-04-08 08:52:44
如何在 Simulink 中啟用 ADC 校準(zhǔn)?
V4.2.0 產(chǎn)品發(fā)布報(bào)告指出,它在塊中可用。但我在 ADC 配置塊中找不到任何選項(xiàng)。
2025-03-31 07:50:51
速度控制模型,以提高無刷直流電機(jī)速度控制系統(tǒng)的穩(wěn)定性和抗干擾能力 。使用 Matlab/Simulink 工具箱建立無刷直流電機(jī)的仿真模型,研究結(jié)果表明,模糊自適應(yīng) PID 算法能夠使無刷直流電機(jī)的速度
2025-03-27 12:15:55
PID 控制器,并通過 MAT- LAB/Simulink 對永磁同步直線電機(jī)和其空間矢量控制系統(tǒng)進(jìn)行建模和仿真實(shí)驗(yàn)。仿真結(jié)果表明,采用粒子群優(yōu)化算法的 PID控制系統(tǒng)在指定速度 1 m/s 和加
2025-03-27 12:07:00
HJ55系列三相變頻電源是一種高性能的電源設(shè)備,廣泛應(yīng)用于工業(yè)、科研、測試等領(lǐng)域。它具備分調(diào)和統(tǒng)調(diào)功能,能夠滿足不同場景下的電壓和頻率調(diào)節(jié)需求。以下是關(guān)于HJ55系列三相變頻電源的分調(diào)和統(tǒng)調(diào)功能
2025-03-26 11:55:352148 
我無法在 Windows 10 Pro 上安裝適用于 S32 平臺 3.6.0 的 S32 Design Studio。
安裝日志中有一個錯誤條目:
S32 Design Studio
2025-03-25 08:25:33
在啟動 S32 Design Studio.PFA 時遇到錯誤。
2025-03-24 07:25:20
我目前正在開發(fā)S32K312 系列使用基于模型的設(shè)計(jì)工具箱 (MBDT)在 MATLAB/Simulink 中。最初,我正在嘗試 NXP 示例項(xiàng)目。我打開了一個 DIO S32CT 項(xiàng)目,將
2025-03-20 07:02:39
點(diǎn)擊附件查看清晰圖*附件:無刷電機(jī)電調(diào)原理圖.pdf
2025-03-17 20:07:07
有關(guān)本文所談?wù)摰臒o刷電機(jī)內(nèi)容, 只涉及低速飛行類航模電調(diào)的小功率無傳感器應(yīng)用,講解的理論比較淺顯易懂 ,旨在讓初學(xué)者能夠?qū)o刷電機(jī)有一個比較快的認(rèn) 識,掌握基本原理和控制方法,可以在短時間內(nèi)達(dá)到
2025-03-17 19:57:58
在激光技術(shù)廣泛應(yīng)用的今天,激光設(shè)備的性能優(yōu)劣直接影響著眾多領(lǐng)域的生產(chǎn)與科研成果。而激光 PID控制器,憑借其卓越的調(diào)控能力,成為激光設(shè)備的 “智能核心調(diào)控器”。
2025-03-12 16:03:591011 深圳安騰納天線|高增益八木天線:無線通信的強(qiáng)化利器
2025-03-10 09:03:492178 with Simulink, and physical test with the design hardware platform.
限時0積分免費(fèi)下載哦~~~
2025-03-06 11:30:29
前面咱們有分享對PID算法離散化和增量式PID算法原理進(jìn)行來探索,之后又使用Matlab進(jìn)行了仿真實(shí)驗(yàn),對PID三個參數(shù)又有了更深入的認(rèn)識,接下來我們來使用C語言進(jìn)行PID算法實(shí)現(xiàn),并且結(jié)合控制電機(jī)的項(xiàng)目來深入學(xué)習(xí)。
今天限時免積分下載哦~~~~
2025-03-05 18:32:00
PID是一種非常經(jīng)典的控制方法,該方法被廣泛的應(yīng)用在工業(yè)領(lǐng)域,通常PID算法是通過對希望控制的模擬量進(jìn)行數(shù)字化采樣后得到的數(shù)據(jù)與預(yù)先希望的數(shù)據(jù)進(jìn)行做差,對得到的差值進(jìn)行積分、微分與比例運(yùn)算,然后加
2025-03-03 19:33:432121 
根據(jù)教程要使用內(nèi)部數(shù)據(jù)流 pattern sequence 選項(xiàng),但是并沒有l(wèi)ight control win10系統(tǒng)
2025-03-03 06:17:26
潛在誘導(dǎo)衰減-分流(PID-s)是光伏(光伏)電池中的主要衰減機(jī)制,顯著影響組件性能。為了減緩進(jìn)一步的衰減,定期監(jiān)測PID-s至關(guān)重要。本研究提出使用紅外(IR)熱成像作為評估技術(shù),IR成像通過
2025-02-28 09:04:421229 
一、PID控制簡介 PID( Proportional Integral Derivative)控制是最早發(fā)展起來的控制策略之一,由于其算法簡單、魯棒 性好和可靠性高,被廣泛應(yīng)用于工業(yè)過程
2025-02-27 15:42:427 資料免費(fèi)下啦!本資料包括PID調(diào)節(jié)控制做電機(jī)速度控制、ourdevBasic PID的經(jīng)典文章、PID測速、由入門到精通-吃透PID2.0版、容易理解的PID等相關(guān)PID電機(jī)控制內(nèi)容,從PID控制
2025-02-27 14:17:52
我們的板子是DLPC3478+DLPA3000配置,投影機(jī)跟cy7c65215工具通過I2C連接,I2C總線上無類似MSP430單片機(jī),在使用Display and light control
2025-02-27 08:16:07
摘要:文檔中簡要回顧了 PID 控制器的發(fā)展歷程,綜述了 PID 控制的基礎(chǔ)理論。對 PID 控制今后的發(fā)展進(jìn)行了展望。重點(diǎn)介紹了比例、積分、微分基本控制規(guī)律,及其優(yōu)、缺點(diǎn)。關(guān)鍵詞:PID 控制器 PID 控制 控制 回顧 展望
2025-02-26 15:27:09
在工業(yè)應(yīng)用中 PID 及其衍生算法是應(yīng)用最廣泛的算法之一,是當(dāng)之無愧的萬能算法,如果能夠熟練掌握 PID 算法的設(shè)計(jì)與實(shí)現(xiàn)過程,對于一般的研發(fā)人員來講,應(yīng)該是足夠應(yīng)對一般研發(fā)問題了,而難能可貴
2025-02-26 15:24:22
PID控制器由比例單元(P)、積分單元(I)和微分單元(D)組成。比例(P)調(diào)節(jié)作用:是按比例反應(yīng)系統(tǒng)的偏差,系統(tǒng)一旦出現(xiàn)了偏差,比例調(diào)節(jié)立即產(chǎn)生調(diào)節(jié)作用用以減少 偏差。比例作用大,可以加快調(diào)節(jié),減少誤差,但是過大的比例,使系統(tǒng)的穩(wěn)定性下降,甚至造成系統(tǒng)的不穩(wěn)定。
2025-02-26 15:14:24
你好,請問DLP3010 Light Control EVM有沒有一種便捷的方式投影圖片,如同在DLP? Display and Light Control EVM GUI Tool 軟件中的方式,選擇一幅圖片,點(diǎn)擊set即可。GUI Tool中只有內(nèi)置的4幅圖片,可以添加自定義的720p圖片嗎?
2025-02-25 06:24:46
混合云數(shù)據(jù)保護(hù)解決方案領(lǐng)先提供商Commvault(納斯達(dá)克代碼:CVLT)近日宣布可以使用CIS強(qiáng)化鏡像,從各大云應(yīng)用市場輕松部署Commvault Cloud平臺。這些CIS強(qiáng)化鏡像預(yù)先配置了
2025-02-21 16:36:15784
請問一個調(diào)試DLP4710的時候遇到的問題,其他功能如display等都能正常使用,但一到light control就會communication error,無法正常工作
2025-02-21 08:01:52
我安裝完 Control Program 2.0.0.0,每當(dāng)我點(diǎn)擊Connect時候就會跳出以下錯誤,請問我是否遺漏甚麼呢?
謝謝。
=====================.log
2025-02-20 07:11:04
control_interface.v文件里已經(jīng)寫了非常詳盡的代碼備注。本文繼續(xù)對該文件代碼進(jìn)行講解,并給出SignalTap波形輔助讀者理解。
2025-02-19 15:31:05942 
本文檔涵蓋了如何驅(qū)動 AMD Vivado Design Suite 來分析和改善您的設(shè)計(jì)。
2025-02-19 11:22:26989 
EVM GUI軟件中Light Control模式中無法投影圖像
2025-02-17 08:19:45
目前使用DLP230 control program 控制DLP5530光機(jī)。
現(xiàn)在有這樣一個需求:用DLP 230 control program 連接cheetah SPI(1個
2025-02-17 07:20:09
BP神經(jīng)網(wǎng)絡(luò)的調(diào)參是一個復(fù)雜且關(guān)鍵的過程,涉及多個超參數(shù)的優(yōu)化和調(diào)整。以下是一些主要的調(diào)參技巧與建議: 一、學(xué)習(xí)率(Learning Rate) 重要性 :學(xué)習(xí)率是BP神經(jīng)網(wǎng)絡(luò)中最重要的超參數(shù)之一
2025-02-12 16:38:491568 近期,英飛凌公司宣布其最新的PSOC Control系列中的C3產(chǎn)品已經(jīng)正式問世,并宣布量產(chǎn)。作為PSOC Control系列的首個量產(chǎn)產(chǎn)品,PSOC Control C3的推出標(biāo)志著英飛凌在電機(jī)
2025-02-08 14:45:531319 新手用了matlab里的simulink搭了個推挽仿真,pwm輸出為28khz,占空比0.45,變壓器匝數(shù)比1:31,輸入電壓12v,輸出電壓310v,想做個功率1kw的,然后接了個96.1的負(fù)載,輸出電壓只有160多v了。*附件:newpushpull.zip空載帶載變壓器參數(shù)
2025-02-07 20:01:41
一、XGBoost超參數(shù)調(diào)優(yōu)技巧 XGBoost(eXtreme Gradient Boosting)是一種基于梯度提升決策樹(GBDT)的高效梯度提升框架,在機(jī)器學(xué)習(xí)競賽和實(shí)際業(yè)務(wù)應(yīng)用中取得了卓越
2025-01-31 15:16:002304 輸出為0.131V,具體問題如下.
1.在寫control Byte的時候,尚未寫完8個bits,ADS7844 Dout就開始拉高,與datasheet時序圖不符合,為什么?
2.寫完control
2025-01-24 08:00:08
光伏組件的抗PID性能影響組件的發(fā)電效率和使用壽命,被光伏行業(yè)廣泛關(guān)注。EVA膠膜是光伏組件的主要封裝材料之一,其具有優(yōu)異的性價(jià)比,但隨著光伏行業(yè)技術(shù)革新,對封裝材料抗PID要求越來越高。實(shí)驗(yàn)兩種
2025-01-22 09:02:271515 電子發(fā)燒友網(wǎng)站提供《Vivado Design Suite用戶指南: 設(shè)計(jì)分析與收斂技巧.pdf》資料免費(fèi)下載
2025-01-15 15:28:442 電子發(fā)燒友網(wǎng)站提供《Vivado Design Suite用戶指南:邏輯仿真.pdf》資料免費(fèi)下載
2025-01-15 15:25:580 本文介紹了Design House和Fab的關(guān)系,以及Design House所負(fù)責(zé)的工作內(nèi)容與面臨的挑戰(zhàn)。 Design House(設(shè)計(jì)公司),通常是指專注于集成電路(IC)設(shè)計(jì)的公司,與晶圓廠
2025-01-07 09:59:341641
 電子發(fā)燒友App
電子發(fā)燒友App









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論