完善資料讓更多小伙伴認識你,還能領取20積分哦,立即完善>
標簽 > RTOS

實時操作系統(RTOS)是指當外界事件或數據產生時,能夠接受并以足夠快的速度予以處理,其處理的結果又能在規定的時間之內來控制生產過程或對處理系統做出快速響應,調度一切可利用的資源完成實時任務,并控制所有實時任務協調一致運行的操作系統。
實時操作系統(RTOS)是指當外界事件或數據產生時,能夠接受并以足夠快的速度予以處理,其處理的結果又能在規定的時間之內來控制生產過程或對處理系統做出快速響應,調度一切可利用的資源完成實時任務,并控制所有實時任務協調一致運行的操作系統。提供及時響應和高可靠性是其主要特點。
RTOS系統
RTOS是一個內核,典型的單片機程序在程序指針復位后,首先進行堆棧、中斷、中斷向量、定時器、串行口等接口設置、初始化數據存儲區和顯示內容,然后就來到了一個監測、等待或空循環,在這個循環中,CPU可以監視外設、響應中斷或用戶輸入。
這段主程序可以看作是一個內核,內核負責系統的初始化和開放、調度其它任務,相當于C語言中的主函數。
RTOS就是這樣的一個標準內核,包括了各種片上外設初始化和數據結構的格式化,不必、也不推薦用戶再對硬件設備和資源進行直接操作,所有的硬件設置和資源訪問都要通過RTOS核心。硬件這樣屏蔽起來以后,用戶不必清楚硬件系統的每一個細節就可以進行開發,這樣就減少了開發前的學習量。
實時操作系統(RTOS)是指當外界事件或數據產生時,能夠接受并以足夠快的速度予以處理,其處理的結果又能在規定的時間之內來控制生產過程或對處理系統做出快速響應,調度一切可利用的資源完成實時任務,并控制所有實時任務協調一致運行的操作系統。提供及時響應和高可靠性是其主要特點。
定義
實時操作系統是保證在一定時間限制內完成特定功能的操作系統。實時操作系統有硬實時和軟實時之分,硬實時要求在規定的時間內必須完成操作,這是在操作系統設計時保證的;軟實時則只要按照任務的優先級,盡可能快地完成操作即可。我們通常使用的操作系統在經過一定改變之后就可以變成實時操作系統。
例如,可以為確保生產線上的機器人能獲取某個物體而設計一個操作系統。在“硬”實時操作系統中,如果不能在允許時間內完成使物體可達的計算,操作系統將因錯誤結束。在“軟”實時操作系統中,生產線仍然能繼續工作,但產品的輸出會因產品不能在允許時間內到達而減慢,這使機器人有短暫的不生產現象。一些實時操作系統是為特定的應用設計的,另一些是通用的。一些通用目的的操作系統稱自己為實時操作系統。但某種程度上,大部分通用目的的操作系統,如微軟的Windows NT或IBM的OS/390有實時系統的特征。這就是說,即使一個操作系統不是嚴格的實時系統,它們也能解決一部分實時應用問題。
大體上,實時操作系統(RTOS)要求:
多任務
處理能被區分優先次序的進程線
一個中斷水平的充份數量
被裝入作為微型設備一部分的內含小操作系統經常要求實時操作系統。一些核心問題能被考慮以符合實時操作系統的需求。然而,因為像設備驅動程序這樣的其他成份,也通常被特別的方法需要,一個實時操作系統通常比核心更大。
RTOS系統
1.RTOS是一個內核
典型的單片機程序在程序指針復位后,首先進行堆棧、中斷、中斷向量、定時器、串行口等接口設置、初始化數據存儲區和顯示內容,然后就來到了一個監測、等待或空循環,在這個循環中,CPU可以監視外設、響應中斷或用戶輸入。
這段主程序可以看作是一個內核,內核負責系統的初始化和開放、調度其它任務,相當于C語言中的主函數。
RTOS就是這樣的一個標準內核,包括了各種片上外設初始化和數據結構的格式化,不必、也不推薦用戶再對硬件設備和資源進行直接操作,所有的硬件設置和資源訪問都要通過RTOS核心。硬件這樣屏蔽起來以后,用戶不必清楚硬件系統的每一個細節就可以進行開發,這樣就減少了開發前的學習量。
一般來說,對硬件的直接訪問越少,系統的可靠性越高。RTOS是一個經過測試的內核,與一般用戶自行編寫的主程序內核相比,更規范,效率和可靠性更高。對于一個精通單片機硬件系統和編程的“老手”而言,通過RTOS對系統進行管理可能不如直接訪問更直觀、自由度大,但是通過RTOS管理能夠排除人為疏忽因素,提高軟件可靠性。
另外,高效率地進行多任務支持是RTOS設計從始至終的一條主線,采用RTOS管理系統可以統一協調各個任務,優化CPU時間和系統資源的分配,使之不空閑、不擁塞。針對某種具體應用,精細推敲的應用程序不采用RTOS可能比采用RTOS能達到更高的效率;但是對于大多數一般用戶和新手而言,采用RTOS是可以提高資源利用率的,尤其是在片上資源不斷增長、產品可靠性和進入市場時間更重要的今天。
2.RTOS是一個平臺
RTOS建立在單片機硬件系統之上,用戶的一切開發工作都進行于其上,因此它可以稱作是一個平臺。采用RTOS的用戶不必花大量時間學習硬件,和直接開發相比起點更高。
RTOS還是一個標準化的平臺,它定義了每個應用任務和內核的接口,也促進了應用程序的標準化。應用程序標準化后便于軟件的存檔、交流、修改和擴展,為嵌入式軟件開發的工程化創造了條件、減少開發管理工作量。嵌入式軟件標準化推廣到社會后,可以促進軟件開發的分工,減少重復勞動,近來出現的建立于RTOS上的文件和通信協議庫函數產品等就是實例。
RTOS對于開發單位和開發者個人來說也是一種提高。引入RTOS的開發單位,相當于引入了一套行業中廣泛采用的嵌入式系統應用程序開發標準,使開發管理更簡易、有效。基于RTOS和C語言的開發,具有良好的可繼承性,在應用程序、處理器升級以及更換處理器類型時,現存的軟件大部分可以不經修改地移植過來。
對于開發人員來說,則相當于在程序設計中采用一種標準化的思維方式,提高知識創造的效率;同時因為具有類似的思路,可以更快地理解同行其它人員的創造成果
特點
一、時間約束性
實時系統的任務具有一定的時間約束(截止時間)。根據截止時間,實時系統的實時性分為“硬實時”和“軟實時”。硬實時是指應用的時間需求能夠得到完全滿足,否則就造成重大安全事故,甚至造成重大的生命財產損失和生態破壞,如在航空航天、軍事、核工業等一些關鍵領域中的應用。軟實時是指某些應用雖然提出時間需求,但實時任務偶爾違反這種需求對系統運行及環境不會造成嚴重影響,如監控系統等和信息采集系統等。
二、可預測性
可預測性是指系統能夠對實時任務的執行時間進行判斷,確定是否能夠滿足任務的時限要求。由于實時系統對時間約束要求的嚴格性,使可預測性稱為實時系統的一項重要性能要求。除了要求硬件延遲的可預測性以外,還要求軟件系統的可預測性,包括應用程序的響應時間是可預測的,即在有限的時間內完成必須的工作;以及操作系統的可預測性,即實時原語、調度函數等運行開銷應是有界的,以保證應用程序執行時間的有界性。
三、可靠性
大多數實時系統要求有較高的可靠性。在一些重要的實時應用中,任何不可靠因素和計算機的一個微小故障,或某些特定強實時任務(又叫關鍵任務)超過時限,都可能引起難以預測的嚴重后果。為此,系統需要采用靜態分析和保留資源的方法及冗余配置,使系統在最壞情況下都能正常工作或避免損失。可靠性已成為衡量實時系統性能不可缺少的重要指標。
四、與外部環境的交互作用性
實時系統通常運行在一定的環境下,外部環境是實時系統不可缺少的一個組成部分。計算機子系統一般是控制系統,它必須在規定的時間內對外部請求做出反應。外部物理環境往往是被控子系統,兩者互相作用構成完整的實時系統。大多數控制子系統必須連續運轉以保證子系統的正常工作或準備對任何異常行為采取行動。
早期的實時系統功能簡單,包括單板機、單片機,以及簡單的嵌入式實時系統等,其調度過程相對簡單。隨著實時系統應用范圍的不斷擴大,系統復雜性不斷提高,實時系統具有以下新特點。
1、多任務類型
在實時系統中,不但包括周期任務、偶發任務、非周期任務,還包括非實時任務。實時任務要求要滿足時限,而非實時任務要求要使其響應時間盡可能的短。多種類型任務的混合,使系統的可調度性分析更加困難。
2、約束的復雜性
任務的約束包括時間約束、資源約束、執行順序約束和性能約束。時間約束是任何實時系統都固有的約束。資源約束是指多個實時任務共享有限的資源時,必須按照一定的資源訪問控制協議進行同步,以避免死鎖和高優先級任務被低優先級任務堵塞的時間(即優先級倒置時間)不可預測。執行順序約束是指各任務的啟動和執行必須滿足一定的時間和順序約束。例如,在分布式端到端(end-to-end)實時系統很重,同一任務的各子任務之間存在前驅/后驅約束關系,需要執行同步協議來管理子任務的啟動和控制子任務的執行,使它們滿足時間約束和系統可調度要求。性能約束是指必須滿足如可靠性、可用性、可預測性、服務質量(Quality of Service,QoS)等性能指標。
3、具有短暫超載的特點
在實時系統中,即使一個功能設計合理、資源充足的系統也可能由于一下原因超載:
1)系統元件出現老化,外圍設備錯誤或系統發生故障。隨著系統運行時間的增長,系統元件出現老化,系統部件可能發生故障,導致系統可用資源降低,不能滿足實時任務的時間約束要求。
2)環境的動態變化。由于不能對未來的環境、系統狀態進行正確有效地預測,因此不能從整體角度上對任務進行調度,可能導致系統超載。
3)應用規模的擴大。原先滿足實時任務時限要求的系統,隨著應用規模的增大,可能出現不能滿足任務時限要求的情況,而重新設計、重建系統在時間和經濟上又不允許。


基于FD-SST 的無人機目標跟蹤系統的設計與實現|技術集結
應用實現功能1.本應用基于睿擎派,實現了對無人機目標的實時跟蹤,并將跟蹤結果用于驅動兩軸轉臺完成自動指向。主要功能包括:使用FD-SST算法在視頻流中實...

如果你剛接觸RTOS(實時操作系統),很可能會有這樣的困惑:“RTOS和裸機程序到底有什么區別?”“任務是線程嗎?為什么要分任務?”“信號量和互斥鎖有什...
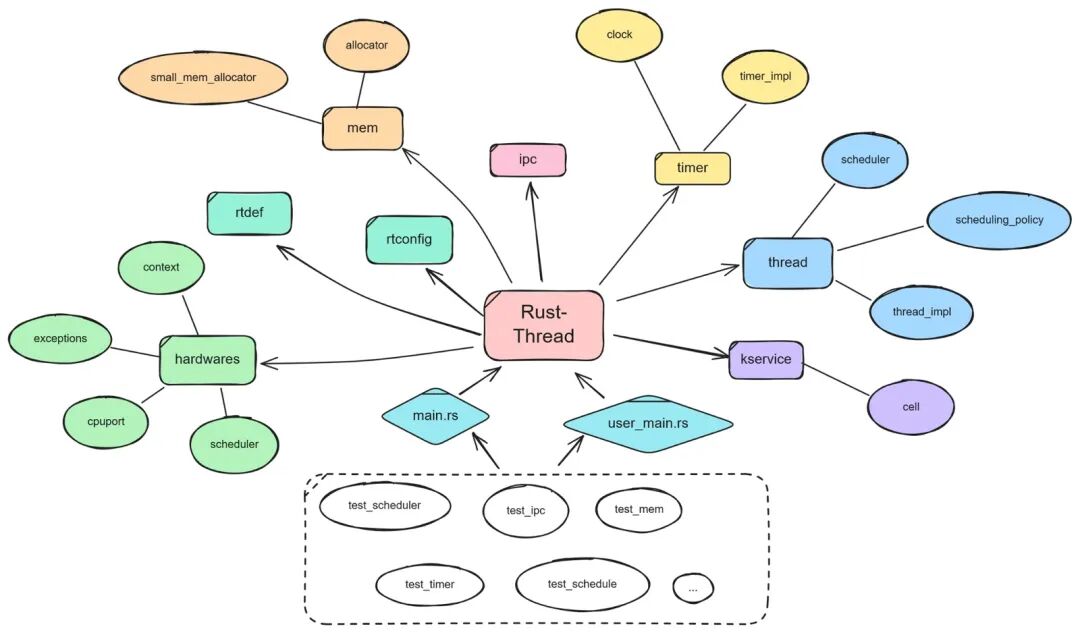
RusT-Thread:基于Rust面向資源受限嵌入式設備的操作系統的實踐 | 技術集結
摘要隨著物聯網和嵌入式系統的發展,實時操作系統(RTOS)的安全性和性能需求日益提高。傳統基于C語言的RTOS在內存安全和并發控制方面存在局限,容易導致...
嵌入式圈里聊 RTOS,總有人揪著任務調度的那點差異爭得面紅耳赤,可實際上這東西做透了大家都大差不差 —— 優先級調度、時間片輪轉,核心邏輯翻來覆去就那...
到2025年底,全球將有超過559億臺設備實現聯網。設備連接的爆炸式增長使得關鍵系統與普通設備并存。
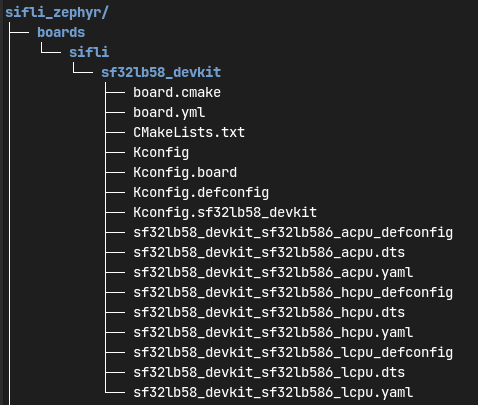
移植 ZephyrRTOS 到思澈 SF32LB58 過程筆記之二 建立板級定義
ZephyrRTOS 的編譯,是從指定板子 (board) 標識符開始的。所以為了編譯測試我們的定義和代碼,就必須先定義對應的板子。目前我這里使用的是 ...
移植 ZephyrRTOS 到思澈 SF32LB58 過程筆記 一
為 ZephyrRTOS 增加 SoC 支持(2) 基礎框架 N32L406 的移植還沒有完成,最近又開坑做思澈 SF32LB58 的移植。原因一是這個...

瑞薩RA8系列教程 | 基于e2s在RA8上跑RTOS實現的方法
我們今天教大家快速搭建FreeRTOS工程的方法。早期,軟件工具不那么成熟,搭建FreeRTOS工程都是需要一步一步手動移植。很多小伙伴吐槽,移植過程太...

虹科白皮書 | 航空航天與國防革新:TSN和RTOS融合技術
時間敏感網絡(TSN)與實時操作系統(RTOS)的融合標志著航空航天行業的一個變革性里程碑。本文考察了TSN提供確定性、可靠和高帶寬通信的能力,通過IE...
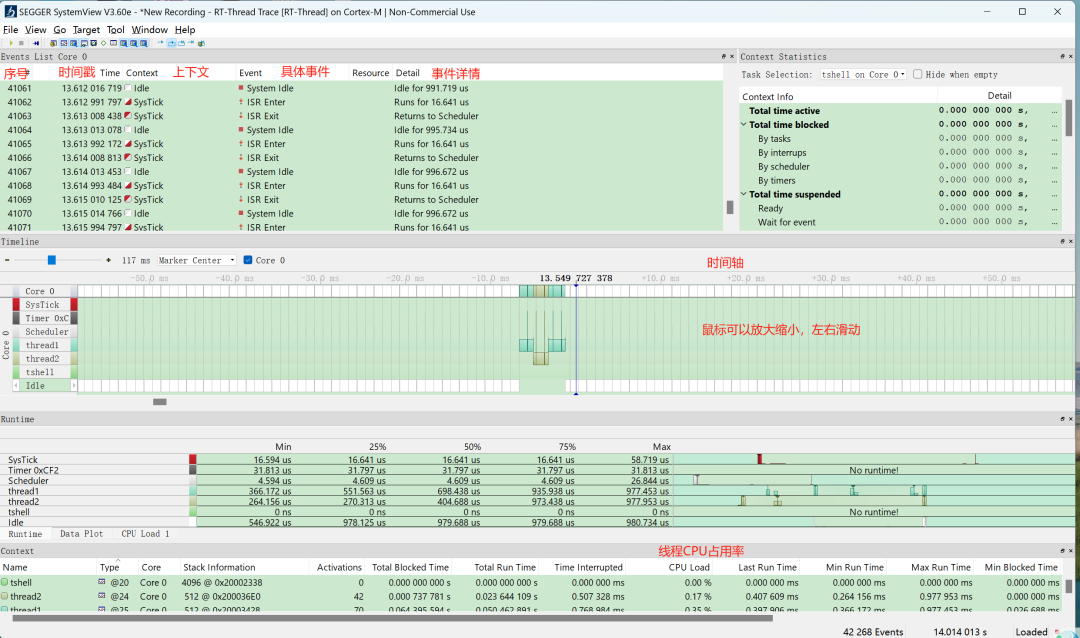
實時可視化調試:SystemView 助你掌控RTOS運行態
在嵌入式開發中,調試永遠是最痛苦的環節。你是否曾經為了定位一個? 卡頓、死機、優先級反轉 ?的問題而疲憊不堪?你是否希望能 實時觀察系統的運行細節 ,比...
【玩轉多核異構】T153核心板RISC-V核的實時性應用解析
飛凌嵌入式FET153-S核心板的異構多核架構展現出了卓越的通信性能,能夠為諸多應用提供高效可靠的核心支撐,特別適用于對實時性和穩定性要求極高的智能應用場景。
信任根的重要組成部分是實時操作系統(RTOS),它為應用程序的運行提供了一個安全的平臺。嵌入式系統的具體安全要求取決于其架構以及所面臨的威脅。在本博客中...
南京雷潤信息科技有限公司(以下簡稱“南京雷潤”)今日宣布,與全球實時操作系統技術領導者QNX持續合作已達八周年。自2017年成為QNX公司中國授權代理商...
此前,9月11日及17日,2025年STM32研討會在北京和上海成功舉辦。作為ST合作伙伴,麥克泰技術展示了基于STM32的功能安全操作系統方案。
當一個高優先級任務正在等待一個資源,但一個低優先級任務正在持有它,一個中等優先級任務繼續在中間運行時,就會發生優先級反轉——阻止低優先級任務釋放它。
選擇合適的實時操作系統(RTOS,Real-Time Operating System)可能會影響你在不同行業的職業發展路徑。
STM32 入門工具選型攻略:新手別再盲目入手,選對了才能少走彎路
初入門嵌入式的你是不是也經歷過這樣的崩潰時刻?對著STM32datasheet上密密麻麻的寄存器手冊,半天看不懂“GPIO輸出模式”到底是啥意思;學“中...
在汽車、工業和醫療等領域,嵌入式軟件正成為推動創新的核心。從連接設備到復雜的邊緣計算平臺,企業越來越依賴嵌入式系統開發來實現產品差異化,并滿足快速增長的...
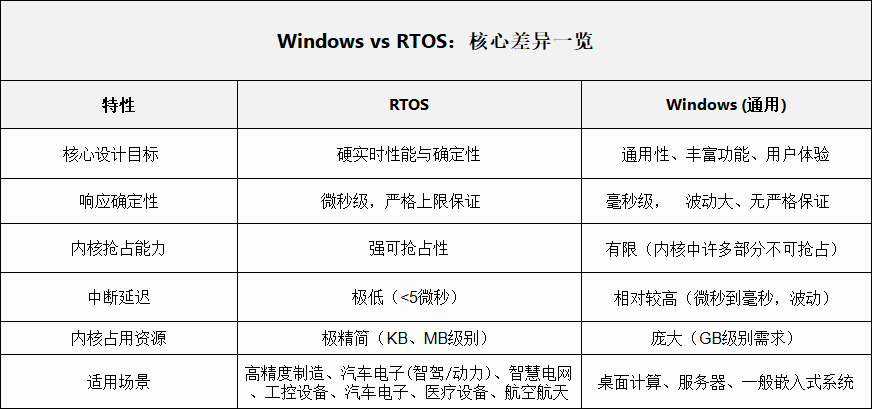
強實時需求下:為什么選RTOS而非Windows?-深入解析差異
自主安全可控:作為國產自主操作系統,鴻道Intewell操作系統的高實時性和可控性滿足飛機飛控要求并長期驗證穩定運行,是國內首個通過汽車(ISO 262...
此前,6月26-27日在蘇州舉行的2025年高通汽車技術與合作峰會,聚焦全景式高通汽車解決方案,眾多業界合作伙伴,展示了ADAS先進駕駛輔助系統、艙駕一...
 換一批
換一批
編輯推薦廠商產品技術軟件/工具OS/語言教程專題
| 電機控制 | DSP | 氮化鎵 | 功率放大器 | ChatGPT | 自動駕駛 | TI | 瑞薩電子 |
| BLDC | PLC | 碳化硅 | 二極管 | OpenAI | 元宇宙 | 安森美 | ADI |
| 無刷電機 | FOC | IGBT | 逆變器 | 文心一言 | 5G | 英飛凌 | 羅姆 |
| 直流電機 | PID | MOSFET | 傳感器 | 人工智能 | 物聯網 | NXP | 賽靈思 |
| 步進電機 | SPWM | 充電樁 | IPM | 機器視覺 | 無人機 | 三菱電機 | ST |
| 伺服電機 | SVPWM | 光伏發電 | UPS | AR | 智能電網 | 國民技術 | Microchip |
| 開關電源 | 步進電機 | 無線充電 | LabVIEW | EMC | PLC | OLED | 單片機 |
| 5G | m2m | DSP | MCU | ASIC | CPU | ROM | DRAM |
| NB-IoT | LoRa | Zigbee | NFC | 藍牙 | RFID | Wi-Fi | SIGFOX |
| Type-C | USB | 以太網 | 仿真器 | RISC | RAM | 寄存器 | GPU |
| 語音識別 | 萬用表 | CPLD | 耦合 | 電路仿真 | 電容濾波 | 保護電路 | 看門狗 |
| CAN | CSI | DSI | DVI | Ethernet | HDMI | I2C | RS-485 |
| SDI | nas | DMA | HomeKit | 閾值電壓 | UART | 機器學習 | TensorFlow |
| Arduino | BeagleBone | 樹莓派 | STM32 | MSP430 | EFM32 | ARM mbed | EDA |
| 示波器 | LPC | imx8 | PSoC | Altium Designer | Allegro | Mentor | Pads |
| OrCAD | Cadence | AutoCAD | 華秋DFM | Keil | MATLAB | MPLAB | Quartus |
| C++ | Java | Python | JavaScript | node.js | RISC-V | verilog | Tensorflow |
| Android | iOS | linux | RTOS | FreeRTOS | LiteOS | RT-THread | uCOS |
| DuerOS | Brillo | Windows11 | HarmonyOS |
關注我們的微信

下載發燒友APP

電子發燒友觀察

版權所有 ? 湖南華秋數字科技有限公司
長沙市望城經濟技術開發區航空路6號手機智能終端產業園2號廠房3層(0731-88081133)
電子發燒友 (電路圖) 湘公網安備43011202000918 工商網監
湘ICP備2023018690號-1
工商網監
湘ICP備2023018690號-1

