 RTOS 必學概念:任務、信號量、隊列一次搞懂
RTOS 必學概念:任務、信號量、隊列一次搞懂

如果你剛接觸 RTOS(實時操作系統),很可能會有這樣的困惑:
- “RTOS 和裸機程序到底有什么區別?”
- “任務是線程嗎?為什么要分任務?”
- “信號量和互斥鎖有什么區別,不都是同步手段嗎?”
- “隊列是不是就是一個 FIFO 緩沖區?”
這些問題聽起來基礎,但又總是繞在初學者腦子里。很多人直接拿 FreeRTOS、RTX 這樣的 RTOS 例程開搞,能跑起來,卻完全沒理解任務調度、信號量、隊列的底層邏輯,導致后續寫項目時 Bug 橫飛,甚至懷疑“RTOS 是不是比裸機更難用”。
今天我們就來把任務、信號量、隊列這三個 RTOS 里的必學概念梳理清楚,并通過對比和例子讓你一次搞懂。
一、為什么需要 RTOS?
在裸機系統里,程序通常是這樣寫的:
- while(1){
- read_sensor();
- process_data();
- send_data();
- }
一個大循環,所有邏輯順序執行。如果功能簡單,這種模式足夠;但當你需要同時處理傳感器采集、串口通信、顯示刷新、按鍵輸入時,問題就來了:
- 如果某個函數阻塞太久,其他功能就卡死。
- 優先級無法區分,緊急任務(如電機過流保護)可能沒及時處理。
- 程序越來越復雜,大循環越來越臃腫。
這就是 RTOS 登場的理由。它通過任務調度,讓不同功能各自獨立運行,調度器負責根據優先級和時間片切換執行,表面上就像“多線程”,雖然 MCU 內核本質上還是單核順序執行。
二、任務(Task)——RTOS 的基本單位
在 RTOS 里,任務(Task/Thread)就像是獨立的小程序,它有自己的堆棧、上下文,可以隨時被掛起或切換。
比如我們把系統功能拆成幾個任務:
- Task_Sensor: 負責傳感器采集
- Task_Comm: 負責通信協議
- Task_Display: 負責屏幕刷新
- Task_Protect: 負責電機保護
這樣做的好處是:邏輯隔離,每個功能都在自己任務里,不會互相干擾。
在 FreeRTOS 中,創建一個任務的代碼大概是這樣的:
- xTaskCreate(Task_Sensor,"Sensor",256,NULL,2,NULL);
- xTaskCreate(Task_Comm,"Comm",256,NULL,3,NULL);
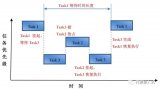
其中最后一個數字就是優先級。RTOS 調度器會始終運行就緒狀態下的最高優先級任務。
但要注意:任務不是越多越好。任務調度需要消耗時間和內存,過多任務會帶來切換開銷,甚至造成“任務優先級反轉”的問題(后面說信號量時會展開)。
三、信號量(Semaphore)——任務之間的協調工具
當多個任務需要共享同一個資源時,就會發生沖突。例如:
如果不加控制,兩個任務會“打架”。這時就需要信號量來實現任務間的同步與互斥。
常見的信號量有兩種:
1、二值信號量(Binary Semaphore)
- 值只有 0 和 1,用來實現“占用/釋放”。
- 類似于“門鑰匙”:誰拿到誰進,出來要歸還。
2、計數信號量(Counting Semaphore)
- 值可以大于 1,適合用于資源池。
- 例如有 3 個緩沖區,最多允許 3 個任務同時使用。
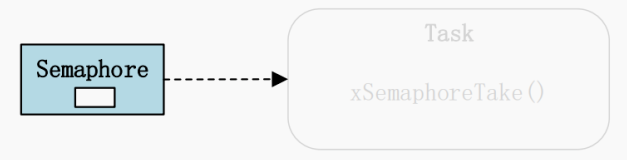
在 FreeRTOS 里,創建和使用信號量的代碼大概是:
- SemaphoreHandle_txSemaphore=xSemaphoreCreateBinary();
- if(xSemaphoreTake(xSemaphore,portMAX_DELAY)){
- // 獲取到信號量,安全訪問資源
- UART_Send(data);
- xSemaphoreGive(xSemaphore);// 釋放
- }
需要注意:信號量不是數據傳遞工具,它只解決“誰先用”的問題。
四、隊列(Queue)——任務間的數據通道
如果說信號量是用來“協調資源”,那么隊列就是用來“傳遞數據”。
舉個例子:
- Task_Sensor采集到溫度數據 25℃,需要傳給Task_Comm發送到上位機。
- Task_Comm不能直接去讀傳感器,因為那是Task_Sensor的職責。
解決辦法就是:Task_Sensor把數據放進隊列,Task_Comm從隊列里取出來。
- QueueHandle_txQueue=xQueueCreate(10,sizeof(int));
- voidTask_Sensor(void*pvParameters){
- inttemp=ReadTemp();
- xQueueSend(xQueue,&temp,0);
- }
- voidTask_Comm(void*pvParameters){
- inttemp;
- if(xQueueReceive(xQueue,&temp,portMAX_DELAY)){
- UART_Send(temp);
- }
- }
這樣兩個任務就解耦了:一個只管“生產數據”,一個只管“消費數據”。
隊列還有一個好處:可以緩存數據,避免丟失。比如傳感器每 10ms 產生一次數據,而通信任務可能要等到 100ms 才空閑,隊列可以起到“緩沖區”的作用。
五、任務 + 信號量 + 隊列:三者如何配合?
在實際系統里,這三者往往要一起使用。比如一個智能家居網關:
1、任務劃分
- Task_Network負責 WiFi 連接
- Task_Sensor負責數據采集
- Task_Comm負責和手機 APP 通信
2、信號量的作用
- Task_Comm和Task_Network都要用到 UART,必須加信號量保護。
3、隊列的作用
- Task_Sensor把采集的數據丟到隊列里,Task_Comm從隊列里拿出來發給手機。
最終系統就像流水線一樣:
- 隊列解決“數據怎么流動”;
- 信號量解決“資源怎么共享”;
- 任務解決“邏輯怎么拆分”。
六、常見誤區與思考
1、誤區:任務越多系統越高效
- 實際上任務太多會增加調度開銷,還會導致優先級反轉。正確做法是合理劃分任務,能用狀態機解決的場景不必創建任務。
2、誤區:信號量可以傳數據
- 信號量只有“有/無”的信息,本質上是控制權,而不是數據傳輸工具。傳數據應該用隊列。
3、誤區:隊列容量開得越大越好
- 隊列需要內存,MCU 內存有限。更大的容量并不意味著更高效,而是要根據數據產生與消費的速率來設計。
七、總結
學習 RTOS,最重要的是搞清楚任務、信號量、隊列這三個核心概念:
- 任務:功能劃分的基本單元,讓不同邏輯獨立運行。
- 信號量:任務間的協調工具,避免資源沖突。
- 隊列:任務間的數據通道,實現生產者-消費者模型。
當你理解了這三者的關系,再去看 FreeRTOS、RTX 的例程,就不會覺得“黑盒子一樣”。寫項目時,也能更從容地選擇用狀態機還是任務,用信號量還是隊列。
RTOS 的世界不復雜,復雜的是我們一開始沒抓住重點。掌握了這些核心機制,你會發現 RTOS 不僅不是負擔,反而讓代碼更清晰、系統更可靠。
-
操作系統
+關注
關注
37文章
7423瀏覽量
129536 -
RTOS
+關注
關注
25文章
868瀏覽量
123183 -
裸機
+關注
關注
0文章
42瀏覽量
6979
發布評論請先 登錄
轉:第24章 FreeRTOS任務計數信號量
FreeRTOS隊列和信號量是干什么用的?
詳解互斥信號量的概念和運行
Linux信號量(2):POSIX 信號量
FreeRTOS 隊列 信號量 互斥量

Free RTOS的互斥信號量



 工商網監
工商網監
評論