近年來,以卷積神經(jīng)網(wǎng)絡(luò)(Convolutional Neural Network,DNN)為代表的深度學(xué)習(xí)算法在許多計算機視覺任務(wù)上取得了巨大突破,如圖像分類、目標(biāo)檢測、畫質(zhì)增強等[1-2]。然而
2020-11-30 14:01:46 13398
13398 
本節(jié)主要將近年來基于候選區(qū)域的目標(biāo)檢測算法分為五個部分進行綜述,首先介紹了Faster R-CNN[14]框架的發(fā)展歷程,然后綜述了對Faster R-CNN算法的四個重要組成部分(特征提取網(wǎng)絡(luò)、ROI Pooling層、RPN、NMS算法)的改進研究.
2023-01-09 10:52:321755 在這篇文章中,我們將學(xué)習(xí)如何在OpenCV中使用基于深度學(xué)習(xí)的邊緣檢測,它比目前流行的canny邊緣檢測器更精確。
2023-05-19 09:52:292814 
方法方面的最新進展,目的是發(fā)現(xiàn)研究差距并提出進一步的改進建議。在簡要介紹了幾種深度學(xué)習(xí)模型之后,我們回顧并分析了使用深度學(xué)習(xí)進行故障檢測,診斷和預(yù)后的應(yīng)用。該調(diào)查驗證了深度學(xué)習(xí)對PHM中各種類型的輸入
2021-07-12 06:46:47
深度學(xué)習(xí)常用模型有哪些?深度學(xué)習(xí)常用軟件工具及平臺有哪些?深度學(xué)習(xí)存在哪些問題?
2021-10-14 08:20:47
CV:2108足球世界杯—深度學(xué)習(xí)實現(xiàn)目標(biāo)檢測俄羅斯總統(tǒng)***對沙特王儲攤的“友好攤手”瞬間—東道主俄羅斯5-0完勝沙特
2018-12-21 10:31:24
深度學(xué)習(xí)如何改進(一)
2019-07-01 16:46:00
,基于深度學(xué)習(xí)的方法在標(biāo)準(zhǔn)的目標(biāo)檢測中取得了可喜的性能。水下目標(biāo)檢測仍具有以下幾點挑戰(zhàn):(1)水下場景的實際應(yīng)用中目標(biāo)通常很小,含有大量的小目標(biāo);(2)水下數(shù)據(jù)集和實際應(yīng)用中的圖像通常是模糊的,圖像中具有
2020-07-24 11:05:39
深度學(xué)習(xí)目標(biāo)檢測系列:faster RCNN實現(xiàn)附python源碼
2019-08-29 08:49:13
學(xué)到了大量關(guān)于深度學(xué)習(xí)的相關(guān)知識。在這里,我想分享人工智能工程師 10 個用于解決機器學(xué)習(xí)問題的強大的深度學(xué)習(xí)方法。但是,我們首先需要定義什么是深度學(xué)習(xí)。如何定義深度學(xué)習(xí)是很多人面臨的一個挑戰(zhàn),因為它
2019-03-07 20:17:28
CV:基于深度學(xué)習(xí)實現(xiàn)目標(biāo)檢測之GUI界面產(chǎn)品設(shè)計并實現(xiàn)圖片識別、視頻識別、攝像頭識別
2018-12-21 10:31:47
本帖最后由 wcl86 于 2021-6-3 16:23 編輯
應(yīng)廣大學(xué)員要求,現(xiàn)開通Labview深度學(xué)習(xí)tensorflow人工智能目標(biāo)檢測-教學(xué)貼,有需要的學(xué)員,可以收藏本貼,接下來會
2021-05-28 11:58:52
MATLAB的行人目標(biāo)檢測的方法有哪些,就是主要的方法,基于背景的,基于目標(biāo)的,還有其他的。都有哪些?
2023-08-23 16:30:20
著手,使用Nanopi2部署已訓(xùn)練好的檢測模型,例如硅谷電視劇的 Not Hotdog 檢測器應(yīng)用,會在復(fù)雜的深度學(xué)習(xí)歷程中有些成就感。 目前已有幾十種流行的深度學(xué)習(xí)算法庫,參考網(wǎng)址:https
2018-06-04 22:32:12
`請問SMT貼片加工后常用的檢測方法有哪些?`
2020-03-03 15:32:43
我們通過傳統(tǒng)算法無法量化,或者說很難去做到的, 深度學(xué)習(xí)可以搞定。特別是在圖像分類, 目標(biāo)檢測這些問題上取得了顯著的提升。下圖是近幾年來深度學(xué)習(xí)在圖像分類問題上取得的成績。之所以提出上面的算法
2021-05-10 22:33:46
`labview在檢測PCBA插件的錯、漏、反等缺陷中的應(yīng)用檢測原理通過高精度彩色工業(yè)相機不停板實時抓取板卡圖像,采取卷積神經(jīng)網(wǎng)絡(luò)算法處理圖像,智能判定元器件不良。采用最新的深度學(xué)習(xí)算法對電容,光耦,二極管等訓(xùn)練模型,能兼容不同pcb板,不同環(huán)境。`
2021-07-13 15:27:47
labview調(diào)用yolo目標(biāo)檢測、分割、分類、obb、pose深度學(xué)習(xí),支持CPU和GPU推理,32/64位labview均可使用。
(yolov5~yolov12)
2025-03-31 16:28:44
項目名稱:基于深度學(xué)習(xí)的目標(biāo)檢測系統(tǒng)設(shè)計試用計劃:嘗試在硬件平臺實現(xiàn)對Yolo卷積神經(jīng)網(wǎng)絡(luò)的加速運算,期望提出的方法能夠使目標(biāo)檢測技術(shù)更便捷,運用領(lǐng)域更廣泛。針對課題的研究一是研究基于開發(fā)板低功耗
2020-09-25 10:11:49
深度學(xué)習(xí)是什么意思
2020-11-11 06:58:03
) 來解決更復(fù)雜的問題,深度神經(jīng)網(wǎng)絡(luò)是一種將這些問題多層連接起來的更深層網(wǎng)絡(luò)。這稱為深度學(xué)習(xí)。目前,深度學(xué)習(xí)被用于現(xiàn)實世界中的各種場景,例如圖像和語音識別、自然語言處理和異常檢測,并且在某些情況下,它
2023-02-17 16:56:59
`【新課上線】tensorflow+目標(biāo)檢測:龍哥教你學(xué)視覺—LabVIEW深度學(xué)習(xí)教程(強推)課程目標(biāo):1、讓沒有任何python,tensorflow基礎(chǔ)的學(xué)員學(xué)習(xí)到如何搭建深度學(xué)習(xí)訓(xùn)練平臺。2
2020-08-10 10:38:12
吳恩達深度學(xué)習(xí) 第三課 第三周 目標(biāo)檢測
2020-05-28 09:03:14
ABSTRACT1.基于深度學(xué)習(xí)的異常檢測的研究方法進行結(jié)構(gòu)化和全面的概述2.回顧這些方法在各個領(lǐng)域這個中的應(yīng)用情況,并評估他們的有效性。3.根據(jù)基本假設(shè)和采用的方法將最先進的深度異常檢測技術(shù)分為
2021-07-12 06:36:22
異常檢測的深度學(xué)習(xí)研究綜述原文:arXiv:1901.03407摘要異常檢測是一個重要的問題,在不同的研究領(lǐng)域和應(yīng)用領(lǐng)域都得到了很好的研究。本文的研究目的有兩個:首先,我們對基于深度學(xué)習(xí)的異常檢測
2021-07-12 07:10:19
摘要異常檢測是一個重要的問題,在不同的研究領(lǐng)域和應(yīng)用領(lǐng)域都得到了充分的研究。本調(diào)查的目的有兩個方面,首先我們對基于深度學(xué)習(xí)的異常檢測的研究方法進行了結(jié)構(gòu)化和全面的概述。此外,我們回顧了這些方法在
2021-07-12 08:05:13
經(jīng)典機器學(xué)習(xí)算法介紹章節(jié)目標(biāo):機器學(xué)習(xí)是人工智能的重要技術(shù)之一,詳細了解機器學(xué)習(xí)的原理、機制和方法,為學(xué)習(xí)深度學(xué)習(xí)與遷移學(xué)習(xí)打下堅實的基礎(chǔ)。二、深度學(xué)習(xí)簡介與經(jīng)典網(wǎng)絡(luò)結(jié)構(gòu)介紹神經(jīng)網(wǎng)絡(luò)簡介神經(jīng)網(wǎng)絡(luò)組件簡介
2022-04-28 18:56:07
要畢業(yè)了,畢設(shè)是完全沒學(xué)過的FPGA課題,求助各位大哥幫幫忙,要求:了解并掌握LFMCW雷達的工作原理、用途及優(yōu)缺點;了解常用的雷達目標(biāo)檢測方法,選取其中一種完成其Verilog實現(xiàn),并用FPGA
2018-04-08 23:48:36
怎樣從傳統(tǒng)機器學(xué)習(xí)方法過渡到深度學(xué)習(xí)?
2021-10-14 06:51:23
經(jīng)典機器學(xué)習(xí)算法介紹章節(jié)目標(biāo):機器學(xué)習(xí)是人工智能的重要技術(shù)之一,詳細了解機器學(xué)習(xí)的原理、機制和方法,為學(xué)習(xí)深度學(xué)習(xí)與遷移學(xué)習(xí)打下堅實的基礎(chǔ)。二、深度學(xué)習(xí)簡介與經(jīng)典網(wǎng)絡(luò)結(jié)構(gòu)介紹 神經(jīng)網(wǎng)絡(luò)簡介神經(jīng)網(wǎng)絡(luò)組件簡介
2022-04-21 15:15:11
研究了目前運動目標(biāo)檢測常用的兩種方法:三幀差分法及混合高斯模型背景差分法,并對兩種運動目標(biāo)檢測方法作了簡述,且輔以典型的視頻運動目標(biāo)檢測實例,給出了兩種方法的實驗結(jié)果
2011-12-23 14:31:41 23
23 本文基于常用運動目標(biāo)檢測方法進行了研究。首先闡述了視頻監(jiān)控系統(tǒng)中常用運動目標(biāo)檢測方法,并對Surendra 背景提取算法及改進的幀間差分法進行了說明。運用對稱差分法和背景差分
2013-09-03 16:23:2223 在深度學(xué)習(xí)領(lǐng)域,我們也有一個新興的 N 體問題。許多更先進的系統(tǒng)現(xiàn)在正在處理多代理系統(tǒng)的問題。每個代理都可能有與全局目標(biāo)合作或競爭的目標(biāo)(即目標(biāo)函數(shù))。在多代理深度學(xué)習(xí)系統(tǒng)中,甚至在模塊化的深度學(xué)習(xí)系統(tǒng)中,研究人員需要設(shè)計可擴展的合作方法。
2017-10-30 10:55:071629 
和動態(tài)特征生成應(yīng)用程序的特征向量;然后,使用深度學(xué)習(xí)算法中的深度置信網(wǎng)絡(luò)( DBN)對收集到的訓(xùn)練集進行訓(xùn)練,生成深度學(xué)習(xí)網(wǎng)絡(luò);最后,利用生成的深度學(xué)習(xí)網(wǎng)絡(luò)對待測安卓應(yīng)用程序進行檢測。實驗結(jié)果表明,在使用相同測試集的情況下
2017-12-01 15:04:274 計算機計算性能的提升使得深度學(xué)習(xí)成為了可能.作為計算機視覺領(lǐng)域的重要發(fā)展方向之一的目標(biāo)檢測也開始結(jié)合深度學(xué)習(xí)方法并廣泛應(yīng)用于各行各業(yè),受限于網(wǎng)絡(luò)的復(fù)雜度和檢測算法的設(shè)計。目標(biāo)檢測的速度和精度成為一個
2017-12-15 10:15:020 模型驅(qū)動的深度學(xué)習(xí)方法近年來,深度學(xué)習(xí)在人工智能領(lǐng)域一系列困難問題上取得了突破性成功應(yīng)用。
2018-01-24 11:30:135356 
為提高低配置計算環(huán)境中的視覺目標(biāo)實時在線分類特征提取的時效性和分類準(zhǔn)確率,提出一種新的目標(biāo)分類特征深度學(xué)習(xí)模型。根據(jù)高時效性要求,選用分類器模型離線深度學(xué)習(xí)的策略,以節(jié)約在線訓(xùn)練時間。針對網(wǎng)絡(luò)深度
2018-03-20 17:30:420 自編碼網(wǎng)絡(luò)算法,在時頻域提取針對目標(biāo)的深度抽象信息進行目標(biāo)檢測,以準(zhǔn)確感知環(huán)境變化。仿真結(jié)果表明,與支持向量機、超限學(xué)習(xí)機和后向傳播神經(jīng)網(wǎng)絡(luò)等傳統(tǒng)機器學(xué)習(xí)相比,該方法可以有效感知環(huán)境變化,具有較高的魯棒性和
2018-03-29 11:29:400 近年來,深度學(xué)習(xí)作為機器學(xué)習(xí)中比較火的一種方法出現(xiàn)在我們面前,但是和非深度學(xué)習(xí)的機器學(xué)習(xí)相比(我將深度學(xué)習(xí)歸于機器學(xué)習(xí)的領(lǐng)域內(nèi)),還存在著幾點很大的不同,具體來說,有以下幾點.
2018-05-02 10:30:004657 本文緣起于一位網(wǎng)友向原作者請教的兩個關(guān)于目標(biāo)檢測的問題:①如何過濾或忽略我不感興趣的類?②如何在目標(biāo)檢測模型中添加新的類?這是否可行?
2018-05-24 14:56:3114925 本文檔的主要內(nèi)容詳細介紹的是人工智能深度學(xué)習(xí)目標(biāo)檢測的詳細資料包括了:RCNN,F(xiàn)ast RCNN ,F(xiàn)aster RCNN ,YOLO,SSD
2018-08-08 17:55:1447 近年來,隨著深度學(xué)習(xí)在圖像視覺領(lǐng)域的發(fā)展,一類基于單純的深度學(xué)習(xí)模型的點云目標(biāo)檢測方法被提出和應(yīng)用,本文將詳細介紹其中一種模型——SqueezeSeg,并且使用ROS實現(xiàn)該模型的實時目標(biāo)檢測。
2018-11-05 16:47:2918783 近年來,隨著深度學(xué)習(xí)在計算機視覺領(lǐng)域的廣泛應(yīng)用,基于深度學(xué)習(xí)的視頻運動目標(biāo)檢測受到廣大學(xué)者的青睞。這種方法的基本原理是利用大量目標(biāo)樣本數(shù)據(jù)訓(xùn)練一個基于深度神經(jīng)網(wǎng)絡(luò)的分類器,然后通過分類器在線檢測目標(biāo)
2018-11-19 16:01:4422 對VGGNet深度學(xué)習(xí)模型進行了簡化,并在模型訓(xùn)練過程中采用了dropout以及Adam算法等優(yōu)化策略。VBN以圖像中每個像素為中心所取的圖像塊作為輸入,然后輸出該圖像塊所屬的類別并據(jù)此判斷中心像素是否屬于虛擬邊界。在對兩類材料圖像進行虛擬邊界檢測的
2018-11-19 16:16:402 深度學(xué)習(xí)作為現(xiàn)今機器學(xué)習(xí)領(lǐng)域中的重要的技術(shù)手段,在圖像識別、機器翻譯、自然語言處理等領(lǐng)域都已經(jīng)很成熟,并獲得了很好的成果。文中針對深度學(xué)習(xí)模型優(yōu)化器的發(fā)展進行了梳理,介紹了常用的梯度下降、動量的梯度
2018-12-18 16:47:509 為了解決復(fù)雜海情環(huán)境下的不同種類和大小的艦船檢測問題,提出一種實時的深度學(xué)習(xí)的目標(biāo)檢測算法。首先,提出了一種清晰圖片和模糊圖片(雨、霧等圖片)判別的方法;然后,在YOLO v2的深度學(xué)習(xí)框架的基礎(chǔ)上
2018-12-19 17:08:463 目標(biāo)視覺檢測是計算機視覺領(lǐng)域的一個重要問題,在視頻監(jiān)控、自主駕駛、人機交互等方面具有重要的研究意義和應(yīng)用價值.近年來,深度學(xué)習(xí)在圖像分類研究中取得了突破性進展,也帶動著目標(biāo)視覺檢測取得突飛猛進的發(fā)展。
2019-01-13 10:59:236389 人工智能,或者說計算機視覺的一個最終目標(biāo)在于構(gòu)建一個真正可適用于真實世界復(fù)雜環(huán)境的系統(tǒng)。而就目前所應(yīng)用的機器學(xué)習(xí)系統(tǒng)而言,大部分采用了有監(jiān)督的學(xué)習(xí)方法,也必然導(dǎo)致了需要廣泛收集圖像樣本,并進行對應(yīng)的圖像標(biāo)注的工作。
2020-01-19 17:03:007341 、基于紋理、基于文字特征等方法,近年來隨著深度學(xué)習(xí)的發(fā)展也會使用目標(biāo)檢測的一些深度學(xué)習(xí)方法。該項目主要的流程如下圖所示:
2020-02-03 15:21:214396 從應(yīng)用的角度來看,目標(biāo)檢測可以被分為兩個研究主題:“ 通用目標(biāo)檢測(General Object Detection) ” 及 “檢測應(yīng)用(Detection Applications)” ,前者
2020-08-28 10:59:292663 
介紹使圖像分割的方法,包括傳統(tǒng)方法和深度學(xué)習(xí)方法,以及應(yīng)用場景。 基于人工智能和深度學(xué)習(xí)方法的現(xiàn)代計算機視覺技術(shù)在過去10年里取得了顯著進展。如今,它被用于圖像分類、人臉識別、圖像中物體的識別、視頻
2020-11-27 10:29:193883 針對基于深度學(xué)習(xí)的目標(biāo)跟蹤算法模型參數(shù)多、難以部署于嵌入式設(shè)備上的問題,提出一種改進的孿生卷積網(wǎng)絡(luò)實時目標(biāo)跟蹤算法。設(shè)計一個非對稱卷積模塊來構(gòu)建整個網(wǎng)絡(luò)框架,通過非對稱卷積模塊的壓縮層減少模型
2021-03-11 10:41:0410 深度學(xué)習(xí)作為人工智能技術(shù)的重要組成部分,被廣泛應(yīng)用于計算機視覺和自然語言處理等領(lǐng)域。盡管深度學(xué)習(xí)在圖像分類和目標(biāo)檢測等任務(wù)中取得了較好性能,但是對抗攻擊的存在對深度學(xué)習(xí)模型的安全應(yīng)用構(gòu)成了潛在威脅
2021-03-12 13:45:5378 的問題,提出一種基于深度學(xué)習(xí)的焊點位置檢測方法。引入 Mobilenetv2的卷積結(jié)構(gòu)代替 YOLOV2的卷積層,并借鑒YOLOⅴ2的細粒度特征的方法,解決YOLOⅴ模型參數(shù)較多的問題。采用 Glou loss對模型的損失函數(shù)進行改進,利用K- means聚類算法得到適合焊
2021-03-17 11:18:019 介紹并給出了顯著性圖,同時對三種類型方法進行了定性分析比較;然后簡單介紹了基于深度學(xué)習(xí)的顯著性目標(biāo)檢測常用的欻據(jù)集和評估準(zhǔn)則;接著對所提基于深度學(xué)習(xí)的昰著性目標(biāo)檢測方法在多個數(shù)據(jù)集上進行了性能比較,包括定量比較、
2021-04-01 14:58:130 針對現(xiàn)有的入侵檢測方法在檢測準(zhǔn)確率和誤報率方面存在的不足,提岀了一種多通道自編碼器深度學(xué)習(xí)的入侵檢測方法。該方法分為無監(jiān)督學(xué)習(xí)和有監(jiān)督學(xué)習(xí)兩個階段:首先分別采用正常流量和攻擊流量訓(xùn)練兩個獨立
2021-04-07 15:23:597 針對復(fù)雜海情下需要對不同大小及種類的船舶進行檢測的問題,提岀一種基于深度學(xué)習(xí)的船舶檢測方法,該方法主要針對區(qū)域全卷積網(wǎng)絡(luò)(R-FCN)進行改進。首先選取 Resnet50網(wǎng)絡(luò)用于自動提取特征,并將
2021-04-13 10:50:0911 描述技術(shù)的發(fā)展歷程為主線,對圖像描述任務(wù)的方法、評價指標(biāo)和常用數(shù)據(jù)集進行了詳細的綜述。針對圖像描述任務(wù)的技術(shù)方法,總結(jié)了基于模板、檢索和深度學(xué)習(xí)的圖像描述生成方法,重點介紹了基于深度學(xué)習(xí)的圖像描述的多種方法
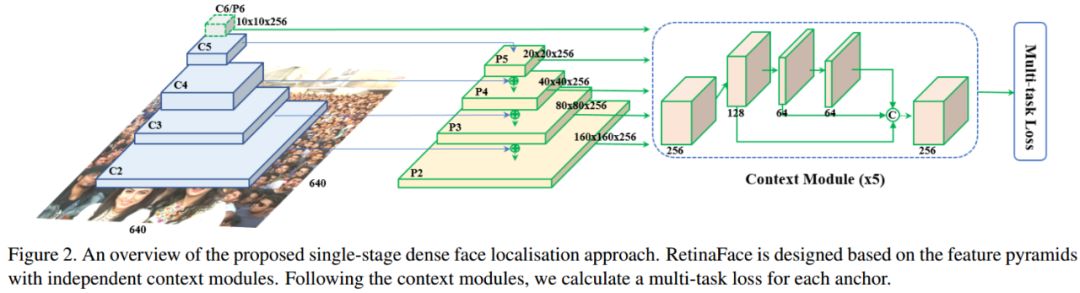
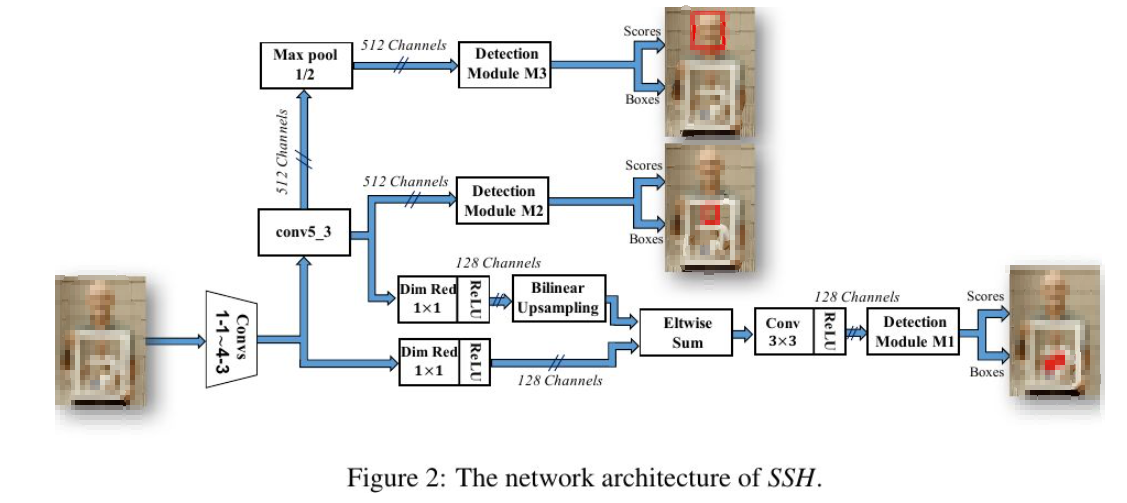
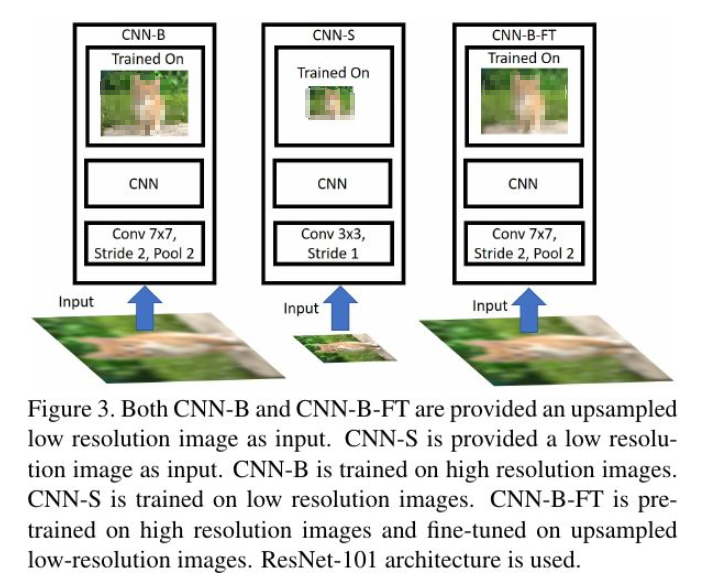
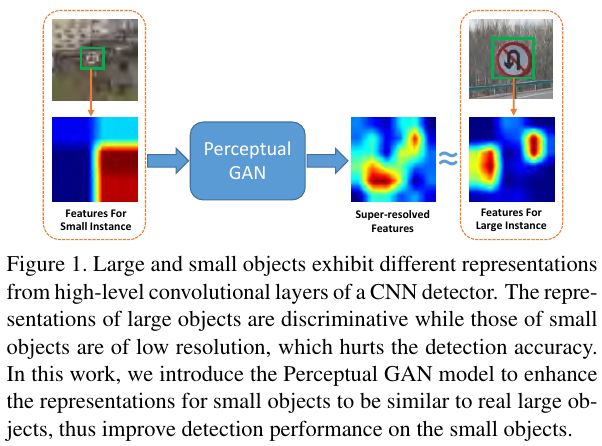
2021-04-23 14:07:3412 導(dǎo)讀 本文介紹了一些小目標(biāo)物體檢測的方法和思路。 在深度學(xué)習(xí)目標(biāo)檢測中,特別是人臉檢測中,由于分辨率低、圖像模糊、信息少、噪聲多,小目標(biāo)和小人臉的檢測一直是一個實用和常見的難點問題。然而,在過去幾年
2021-04-26 14:13:586904 
整體框架 目標(biāo)檢測算法主要包括:【兩階段】目標(biāo)檢測算法、【多階段】目標(biāo)檢測算法、【單階段】目標(biāo)檢測算法 什么是兩階段目標(biāo)檢測算法,與單階段目標(biāo)檢測有什么區(qū)別? 兩階段目標(biāo)檢測算法因需要進行兩階
2021-04-30 10:22:0411402 
導(dǎo)讀 分析了Canny的優(yōu)劣,并給出了OpenCV使用深度學(xué)習(xí)做邊緣檢測的流程。 在這篇文章中,我們將學(xué)習(xí)如何在OpenCV中使用基于深度學(xué)習(xí)的邊緣檢測,它比目前流行的canny邊緣檢測器更精
2021-05-08 11:05:302868 
與水下目標(biāo)檢測相關(guān),如近期正在進行的2021全國水下機器人大賽,接下來我們將介紹在水下目標(biāo)檢測領(lǐng)域的深度學(xué)習(xí)方法概述。 ? 01 水下目標(biāo)檢測的關(guān)鍵問題 1.1 水下圖片模糊 在水下場景中,由于光照影響大大降低了水下圖像的質(zhì)量
2021-05-11 15:43:4811769 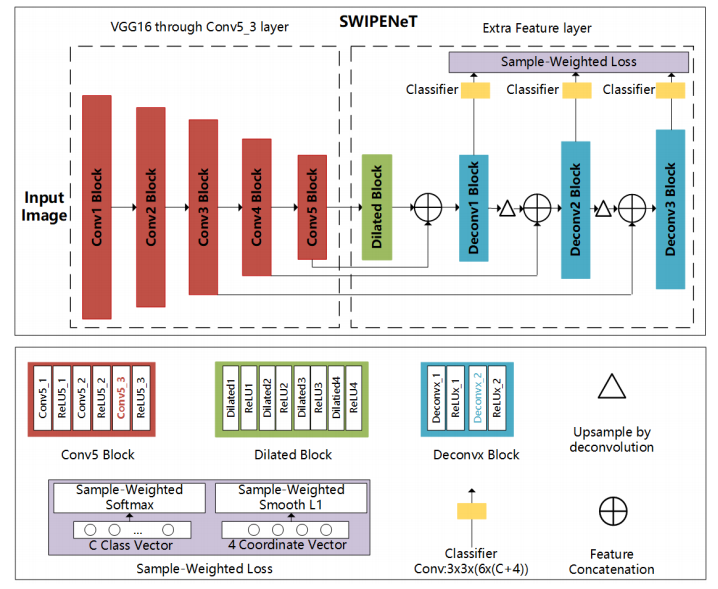
針對海量數(shù)據(jù)環(huán)境下,傳統(tǒng)智能化入侵檢測方法檢測性能較差的問題,提岀了一種深度信念網(wǎng)絡(luò)( deep belief networks,DBN)下一對-(one- versus-one)梯度提升樹
2021-06-09 11:19:5721 基于深度學(xué)習(xí)的道路表面裂縫檢測技術(shù)
2021-07-05 16:30:3073 基于深度學(xué)習(xí)的目標(biāo)檢測研究綜述 來源:《電子學(xué)報》?,作者羅會蘭等 摘 要:?目標(biāo)檢測是計算機視覺領(lǐng)域內(nèi)的熱點課題,在機器人導(dǎo)航、智能視頻監(jiān)控及航天航空等領(lǐng)域都有廣泛的應(yīng)用.本文首先綜述了目標(biāo)檢測
2022-01-06 09:14:582640 
基于改進SSD的車輛小目標(biāo)檢測方法 來源:《應(yīng)用光學(xué)》,作者李小寧等 ? 摘?要:地面車輛目標(biāo)檢測問題中由于目標(biāo)尺寸較小,目標(biāo)外觀信息較少,且易受背景干擾等的原因,較難精確檢測到目標(biāo)。圍繞地面小尺寸
2022-02-08 08:55:212060 
檢測并獲得更好的性能是一項重要的研究。首先回顧和介紹了幾類經(jīng)典的目標(biāo)檢測算法;然后將深度學(xué)習(xí)算法的產(chǎn)生過程作為切入點,以系統(tǒng)的方式全面概述了各種目標(biāo)檢測方法;最后針對目標(biāo)檢測和深度學(xué)習(xí)算法面臨的重大挑戰(zhàn),討論了一些未來的方向,以促進深度學(xué)習(xí)對目標(biāo)檢測的研究。
2022-02-11 08:51:111668 目標(biāo)檢測是計算機視覺的一個非常重要的核心方向,它的主要任務(wù)目標(biāo)定位和目標(biāo)分類。
2022-04-06 14:56:389236 近年來,無需人工干預(yù)的深度學(xué)習(xí)已經(jīng)成為缺陷圖像檢測與分類的一種主流方法。本文針對室內(nèi)墻壁缺
陷缺檢測中數(shù)據(jù)集大多是小樣本的問題,提出了相關(guān)的深度學(xué)習(xí)研究方法。首先,自制墻壁表面缺陷數(shù)據(jù)集(Wall
2022-04-24 09:44:161 基于深度學(xué)習(xí)的工業(yè)缺陷檢測方法可以降低傳統(tǒng)人工質(zhì)檢的成本, 提升檢測的準(zhǔn)確性與效率, 因而在智能制造中扮演重要角色, 并逐漸成為計算機視覺領(lǐng)域新興的研究熱點之一. 其被廣泛地應(yīng)用于無人質(zhì)檢、智能巡檢
2022-07-30 14:41:053704 在深度學(xué)習(xí)領(lǐng)域,通過以精度、召回率、平均精度均值(Mean Average Precision,mAP)和FPS等指標(biāo)評價目標(biāo)檢測算法的有效性,在圖像分割中則主要采用平均像素準(zhǔn)確率、平均交并比等指標(biāo)評價。
2022-08-02 10:08:1810488 電子發(fā)燒友網(wǎng)站提供《AgriAI:使用深度學(xué)習(xí)的植物害蟲檢測.zip》資料免費下載
2022-10-21 09:33:071 R-CNN 算法在 2014 年提出,可以說是歷史性的算法,將深度學(xué)習(xí)應(yīng)用于目標(biāo)檢測領(lǐng)域,相較于之前的目標(biāo)檢測方法,提升多達 30% 以上
2022-10-31 10:08:052662 針對深度學(xué)習(xí)算法在多目標(biāo)跟蹤中的實時性問題, 提出一種基于MobileNet的多目標(biāo)跟蹤算法. 借助于MobileNet深度可分離卷積能夠?qū)?b class="flag-6" style="color: red">深度網(wǎng)絡(luò)模型進行壓縮的原理, 將YOLOv3主干網(wǎng)絡(luò)替換
2022-11-09 10:23:301764 
目標(biāo)檢測是計算機視覺領(lǐng)域的重要研究方向. 傳統(tǒng)的目標(biāo)檢測方法在特征設(shè)計上花費了大量時間, 且手工設(shè)計的特征對于目標(biāo)多樣性的問題并沒有好的魯棒性, 深度學(xué)習(xí)技術(shù)逐漸成為近年來計算機視覺領(lǐng)域的突破口
2022-12-01 10:00:011627 為驗證本文算法對不同大小目標(biāo)的檢測精度, 實驗中隨機選取100張圖片, 其中包含198個目標(biāo), 將其分為大、中、小三類. 由于該網(wǎng)絡(luò)的輸入圖像尺寸為300××300, 將圖像中的檢測目標(biāo)按照其面積占圖像總面積的比例分為三類。
2022-12-05 12:20:542067 但由于缺陷多種多樣,傳統(tǒng)的機器視覺算法很難做到對缺陷特征完整的建模和遷移,所以越來越多的學(xué)者和工程人員開始將深度學(xué)習(xí)算法引入到缺陷檢測領(lǐng)域中。
2023-02-13 15:39:571947 基于深度學(xué)習(xí)的目標(biāo)檢測方法根據(jù)有無區(qū)域提案階段劃分為區(qū)域提案檢測模型和單階段檢測模型
2023-02-27 15:31:492219 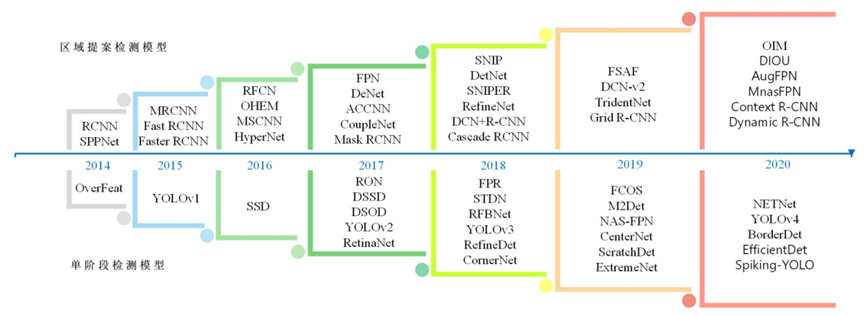
了許多解決深度多模態(tài)感知問題的方法。
然而,對于網(wǎng)絡(luò)架構(gòu)的設(shè)計,并沒有通用的指導(dǎo)方針,關(guān)于“融合什么”、“何時融合”和“如何融合”的問題仍然沒有定論。本文系統(tǒng)地總結(jié)了自動駕駛
中深度多模態(tài)目標(biāo)檢測和語義分割的方法,
2023-06-06 10:37:110 ,也是近年來理論研究的熱點。作為計算機視覺中的基礎(chǔ)算法,目標(biāo)檢測對后續(xù)的人臉識別、目標(biāo)跟蹤、實例分割等任務(wù)都起著至關(guān)重要的作用。 基于深度學(xué)習(xí)的卷積學(xué)習(xí)網(wǎng)絡(luò)(CNN)在目標(biāo)檢測任務(wù)上取得了優(yōu)越的性能,例如FasterRCNN、
2023-06-25 10:37:481270 
摘要:基于強化學(xué)習(xí)的目標(biāo)檢測算法在檢測過程中通常采用預(yù)定義搜索行為,其產(chǎn)生的候選區(qū)域形狀和尺寸變化單一,導(dǎo)致目標(biāo)檢測精確度較低。為此,在基于深度強化學(xué)習(xí)的視覺目標(biāo)檢測算法基礎(chǔ)上,提出聯(lián)合回歸與深度
2023-07-19 14:35:020 摘 要:點云分割是點云數(shù)據(jù)理解中的一個關(guān)鍵技術(shù),但傳統(tǒng)算法無法進行實時語義分割。近年來深度學(xué)習(xí)被應(yīng)用在點云分割上并取得了重要進展。綜述了近四年來基于深度學(xué)習(xí)的點云分割的最新工作,按基本思想分為
2023-07-20 15:23:593 基于神經(jīng)網(wǎng)絡(luò)的機器學(xué)習(xí)方法。 深度學(xué)習(xí)算法可以分為兩大類:監(jiān)督學(xué)習(xí)和無監(jiān)督學(xué)習(xí)。監(jiān)督學(xué)習(xí)的基本任務(wù)是訓(xùn)練模型去學(xué)習(xí)輸入數(shù)據(jù)的特征和其對應(yīng)的標(biāo)簽,然后用于新數(shù)據(jù)的預(yù)測。而無監(jiān)督學(xué)習(xí)通常用于聚類、降維和生成模型等任務(wù)中
2023-08-17 16:11:261829 工業(yè)制造領(lǐng)域中,產(chǎn)品質(zhì)量的保證是至關(guān)重要的任務(wù)之一。然而,人工的檢測方法不僅費時費力,而且容易受到主觀因素的影響,從而降低了檢測的準(zhǔn)確性和一致性。近年來,基于深度學(xué)習(xí)的技術(shù)在工業(yè)缺陷檢測領(lǐng)域取得了顯著的突破,其憑借其出色的特征學(xué)習(xí)和自動化能力,逐漸成為工業(yè)缺陷檢測的熱門方向。
2023-10-24 09:29:274277 
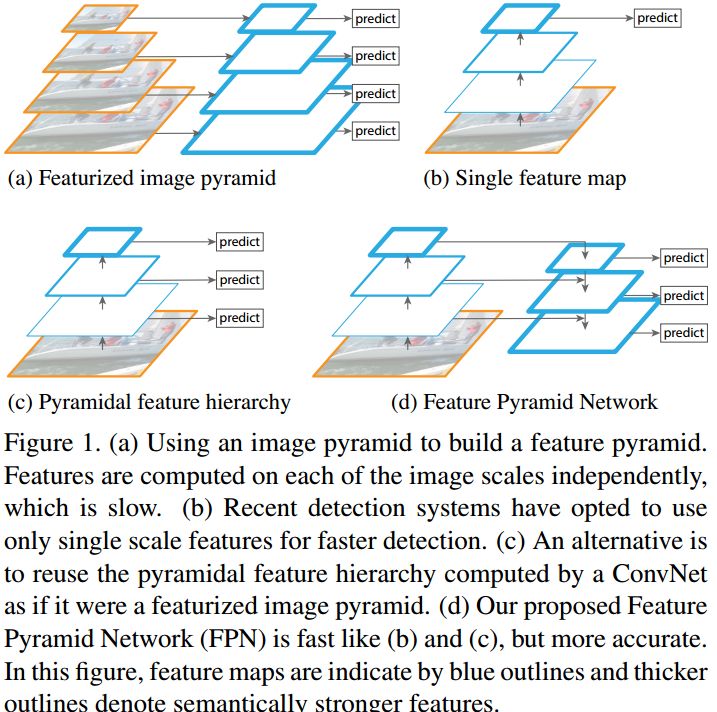
在使用卷積神經(jīng)網(wǎng)絡(luò)進行特征提取時,不同的網(wǎng)絡(luò)深度對應(yīng)不同層次的特征。低層特征的分辨率更高,像素更豐富,包含更多的細節(jié)信息和位置信息,對于目標(biāo)的定位有極大幫助,但包含的語義信息較少。
2023-11-07 12:33:14946 
植物病害準(zhǔn)確檢測與識別是其早期診斷與智能監(jiān)測的關(guān)鍵,是病蟲害精準(zhǔn)化防治與信息化管理的核心。深度學(xué)習(xí)應(yīng)用于植物病害檢測與識別中,可以克服傳統(tǒng)診斷方法的弊端,大幅提升病害檢測與識別的準(zhǔn)確率,引起了廣泛
2023-11-20 17:19:421295 隨著深度學(xué)習(xí)技術(shù)的興起,計算機視覺的許多傳統(tǒng)領(lǐng)域都取得了突破性進展,例如目標(biāo)的檢測、識別和分類等領(lǐng)域。近年來,研究人員開始在視覺SLAM算法中引入深度學(xué)習(xí)技術(shù),使得深度學(xué)習(xí)SLAM系統(tǒng)獲得了迅速發(fā)展,并且比傳統(tǒng)算法展現(xiàn)出更高的精度和更強的環(huán)境適應(yīng)性。
2024-04-23 17:18:362157 
深度學(xué)習(xí)常用的Python庫,包括核心庫、可視化工具、深度學(xué)習(xí)框架、自然語言處理庫以及數(shù)據(jù)抓取庫等,并詳細分析它們的功能和優(yōu)勢。
2024-07-03 16:04:431568 )的廣泛應(yīng)用,小目標(biāo)檢測的性能得到了顯著提升。本文將詳細探討基于深度學(xué)習(xí)的小目標(biāo)檢測技術(shù),包括其定義、挑戰(zhàn)、常用方法以及未來發(fā)展方向。
2024-07-04 17:25:282655 在工業(yè)生產(chǎn)中,缺陷檢測是確保產(chǎn)品質(zhì)量的關(guān)鍵環(huán)節(jié)。傳統(tǒng)的人工檢測方法不僅效率低下,且易受人為因素影響,導(dǎo)致誤檢和漏檢問題頻發(fā)。隨著人工智能技術(shù)的飛速發(fā)展,特別是深度學(xué)習(xí)技術(shù)的崛起,基于AI深度學(xué)習(xí)的缺陷檢測系統(tǒng)逐漸成為工業(yè)界關(guān)注的焦點。本文將深入探討這一系統(tǒng)的構(gòu)建、應(yīng)用及優(yōu)勢,并附上相關(guān)代碼示例。
2024-07-08 10:30:003544 識別等任務(wù)。傳統(tǒng)的機器視覺檢測方法通常依賴于手工設(shè)計的特征和固定的算法,難以應(yīng)對復(fù)雜多變的工業(yè)環(huán)境。而深度學(xué)習(xí)的引入,為工業(yè)機器視覺檢測帶來了新的突破和發(fā)展機遇。
2024-07-08 10:40:262500 應(yīng)用中往往難以實現(xiàn)。因此,無監(jiān)督學(xué)習(xí)在深度學(xué)習(xí)中扮演著越來越重要的角色。本文旨在綜述深度學(xué)習(xí)中的無監(jiān)督學(xué)習(xí)方法,包括自編碼器、生成對抗網(wǎng)絡(luò)、聚類算法等,并分析它們的原理、應(yīng)用場景以及優(yōu)缺點。
2024-07-09 10:50:072734 的發(fā)展,基于深度學(xué)習(xí)的TSC方法逐漸展現(xiàn)出其強大的自動特征提取和分類能力。本文將從多個角度對深度學(xué)習(xí)在時間序列分類中的應(yīng)用進行綜述,探討常用的深度學(xué)習(xí)模型及其改進方法,并展望未來的研究方向。
2024-07-09 15:54:052910 隨著深度學(xué)習(xí)和人工智能技術(shù)的興起與技術(shù)成熟,一大批如FasterR-CNN、RetinaNet、YOLO等可以在工業(yè)界使用的目標(biāo)檢測算法已逐步成熟并進入實際應(yīng)用,大多數(shù)場景下的目標(biāo)檢測問題都能
2024-07-17 08:29:511344 
掌握這 17 種方法,用最省力的方式,加速你的 Pytorch 深度學(xué)習(xí)訓(xùn)練。
2024-10-28 14:05:321078 
 電子發(fā)燒友App
電子發(fā)燒友App









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論