") 一文帶你了解水下目標(biāo)檢測(cè)方法
一文帶你了解水下目標(biāo)檢測(cè)方法

水下目標(biāo)檢測(cè)旨在對(duì)水下場(chǎng)景中的物體進(jìn)行定位和識(shí)別。這項(xiàng)研究由于在海洋學(xué)、水下導(dǎo)航等領(lǐng)域的廣泛應(yīng)用而引起了持續(xù)的關(guān)注。但是,由于復(fù)雜的水下環(huán)境和光照條件,這仍然是一項(xiàng)艱巨的任務(wù)。因此近年來(lái)有多個(gè)賽事與水下目標(biāo)檢測(cè)相關(guān),如近期正在進(jìn)行的2021全國(guó)水下機(jī)器人大賽,接下來(lái)我們將介紹在水下目標(biāo)檢測(cè)領(lǐng)域的深度學(xué)習(xí)方法概述。
01 水下目標(biāo)檢測(cè)的關(guān)鍵問(wèn)題
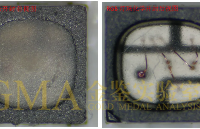
1.1 水下圖片模糊
在水下場(chǎng)景中,由于光照影響大大降低了水下圖像的質(zhì)量,從而導(dǎo)致了可見(jiàn)度損失,弱對(duì)比度和紋理失真,顏色變化等問(wèn)題(如下圖所示),并且在水下場(chǎng)景中環(huán)境復(fù)雜,這導(dǎo)致水下目標(biāo)檢測(cè)更加困難。
1.2 小目標(biāo)檢測(cè)
水下環(huán)境中的目標(biāo)物體通常很小,如:海膽,扇貝,海參等,而當(dāng)前基于深度學(xué)習(xí)的目標(biāo)檢測(cè)器通常無(wú)法有效地檢測(cè)小物體,或者對(duì)小目標(biāo)物體的檢測(cè)性能較差。
02 水下目標(biāo)檢測(cè)的深度學(xué)習(xí)方法
緩解水下圖片模糊主要是通過(guò)對(duì)水下圖片進(jìn)行增強(qiáng),去噪,復(fù)原等方法,對(duì)于小目標(biāo)檢測(cè)的問(wèn)題可以通過(guò)數(shù)據(jù)擴(kuò)增和改進(jìn)網(wǎng)絡(luò)的方式來(lái)緩解,接下來(lái)我們將介紹近年來(lái)解決水下目標(biāo)檢測(cè)問(wèn)題的深度學(xué)習(xí)方法。
Underwater object detection using Invert Multi-Class Adaboost with deep learning
論文鏈接: https://arxiv.org/pdf/2005.11552.pdf
代碼鏈接: https://github.com/LongChenCV/SWIPENet
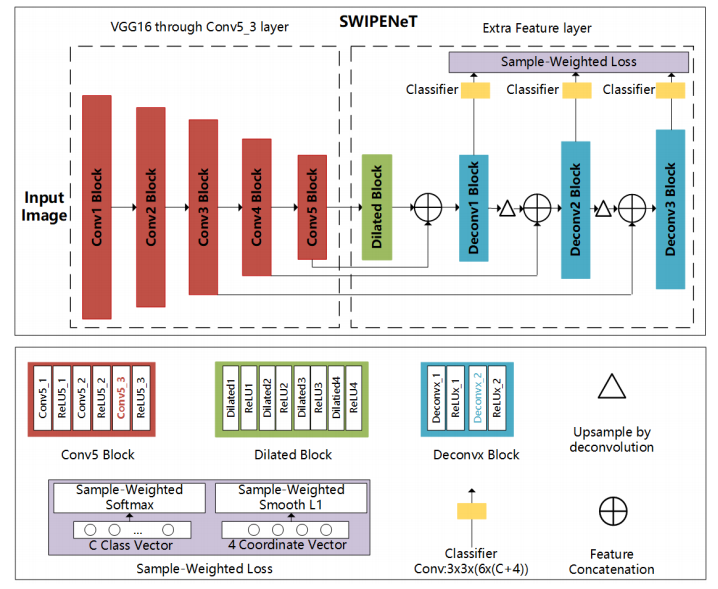
主要方法:文中提出了一種用于水下目標(biāo)小樣本檢測(cè)的SWIPENet,網(wǎng)絡(luò)中提出了一種樣本重加權(quán)算法IMA(Invert Multi-Class Adaboost),IMA會(huì)減少missed objects(丟失對(duì)象)的權(quán)重,以減少這些“干擾”樣本的影響。并且在SWIPENet中引入了具有RELU的空洞卷積層(dilated conv)它們可以在不犧牲特征圖分辨率的情況下獲得大的接受區(qū)域。
IMA算法:首先順序訓(xùn)練多個(gè)基本分類(lèi)器,并根據(jù)其錯(cuò)誤率Em分配權(quán)重值α。然后,將由前面的分類(lèi)器分類(lèi)錯(cuò)誤的樣本分配較高的權(quán)重,從而使后面的分類(lèi)器專(zhuān)注于學(xué)習(xí)這些樣本。最后,將所有弱基礎(chǔ)分類(lèi)器組合在一起,形成具有相應(yīng)權(quán)重的整體分類(lèi)器。IMA還訓(xùn)練了M次SWIPENet,然后將它們整合為一個(gè)統(tǒng)一模型。不同的是,在每次訓(xùn)練迭代中,IMA都會(huì)減少丟失對(duì)象的權(quán)重,以減少這些“干擾”樣本的影響。
實(shí)驗(yàn)結(jié)果:達(dá)到URPC 2017的冠軍結(jié)果,45.0map,冠軍為45.1map。
SWIPENet的網(wǎng)絡(luò)結(jié)構(gòu)圖:
RoIMix: Proposal-Fusion among Multiple Images for Underwater Object Detection
論文鏈接: https://arxiv.org/abs/1911.03029
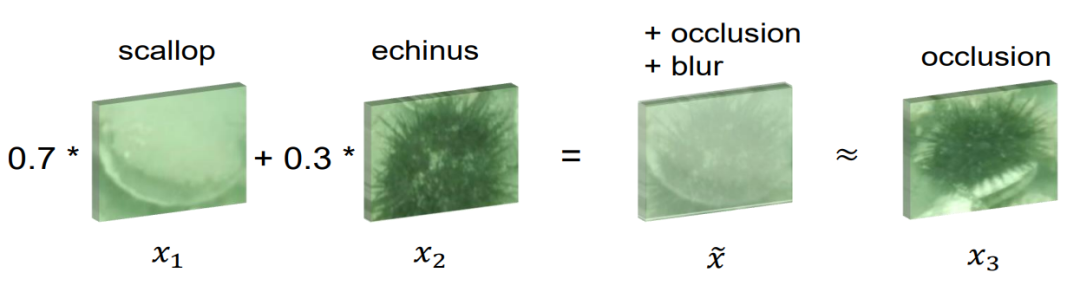
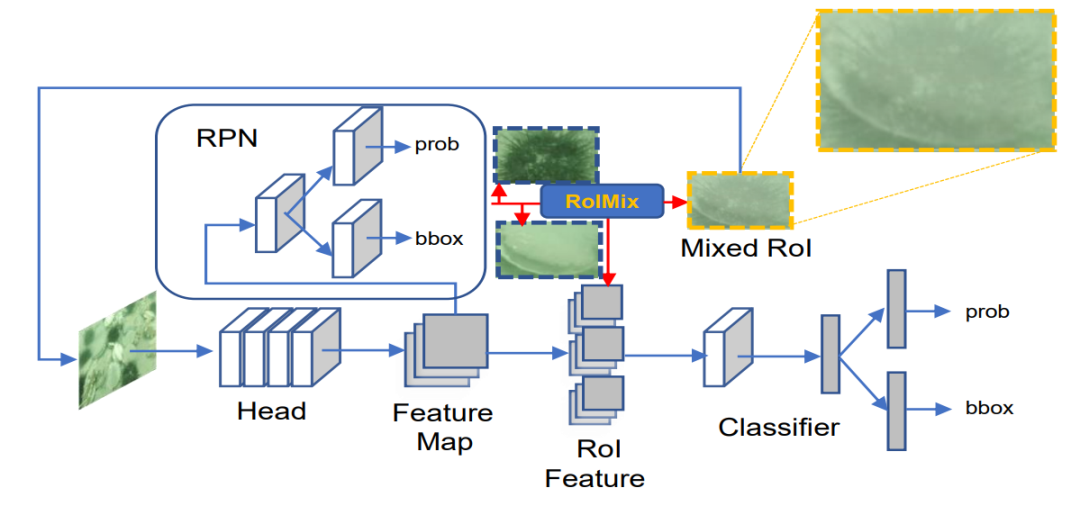
主要方法:URPC 2019水下目標(biāo)檢測(cè)競(jìng)賽冠軍方案:多圖像融合增強(qiáng),針對(duì)水下場(chǎng)景重疊和遮擋(水下生物喜歡聚在一起)、模糊(水中沉淀物導(dǎo)致)的問(wèn)題,提出一種基于候選框融合的圖像增強(qiáng)方法,以生成模擬重疊、遮擋、模糊的訓(xùn)練樣本,從而提高模型的mAP和魯棒性。RoIMix算法使用RPN產(chǎn)生ROI,并以隨機(jī)的比例混合它們。該比例是根據(jù)Beta分布產(chǎn)生的,然后,使用混合樣本來(lái)訓(xùn)練模型。
下圖中:
即為用RoIMix圖像增強(qiáng)方法生成的模擬遮擋+模糊的訓(xùn)練樣本
RoIMix的網(wǎng)絡(luò)結(jié)構(gòu)圖:
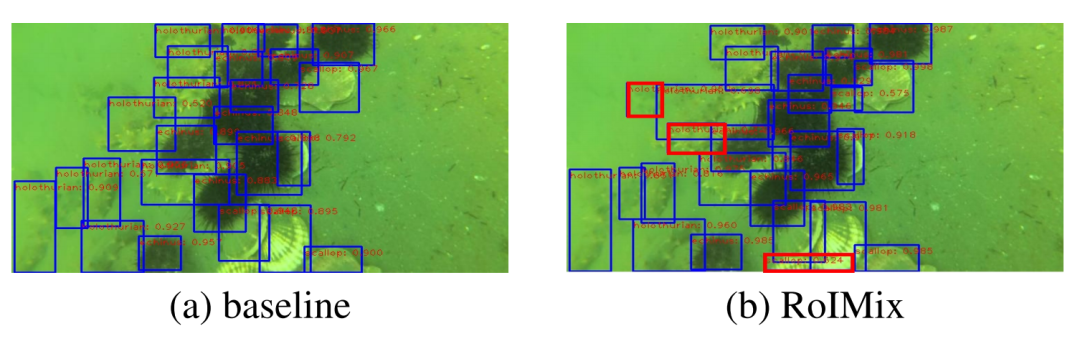
實(shí)驗(yàn)結(jié)果:達(dá)到URPC 2019的冠軍方案,ROIMIX和BaseLine之間的最大性能差異為9.05%個(gè)mAP值。
An Underwater Image Enhancement Benchmark Dataset and Beyond
論文鏈接: https://arxiv.org/abs/1901.05495v1
代碼鏈接: https://github.com/Li-Chongyi/Water-Net_Code
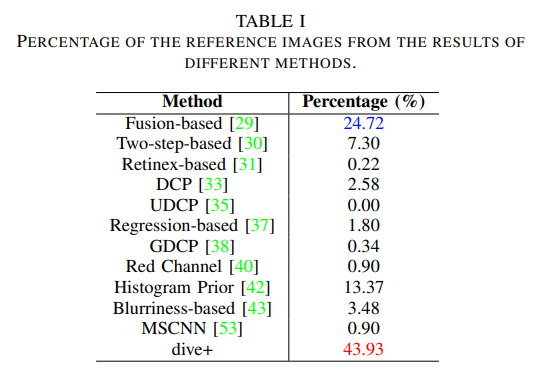
主要方法:文中提出了一個(gè)新的具有950張水下圖片的數(shù)據(jù)集UIEBD,包含各個(gè)水下場(chǎng)景,以及水下各種特征退化(光線不足、霧)的情況,用數(shù)據(jù)集UIEBD對(duì)12種現(xiàn)階段主流的水下圖片增強(qiáng)算法進(jìn)行評(píng)測(cè)和驗(yàn)證。并且提出基于fusion的水下圖片增強(qiáng)模型DuwieNet。
12種水下數(shù)據(jù)擴(kuò)增方法比較:
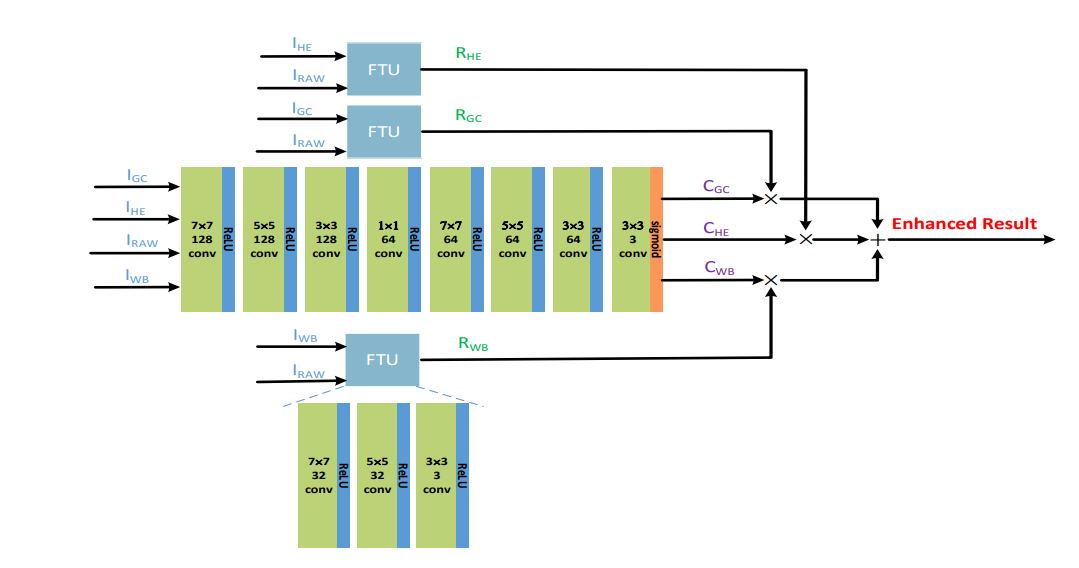
DUIENet: 基于所構(gòu)建的UIEBD數(shù)據(jù)集,作者提出了一種用于水下圖像增強(qiáng)的CNN模型,稱(chēng)為DuwieNet。DuwieNet是—種門(mén)控融合網(wǎng)絡(luò),它將輸入與預(yù)測(cè)的置信度圖融合以獲得增強(qiáng)的結(jié)果。首先通過(guò)FTUs將輸入轉(zhuǎn)換為精確的輸入,然后預(yù)測(cè)置信度圖。最后,將改進(jìn)后的輸入與相應(yīng)的置信度圖進(jìn)行融合,得到增強(qiáng)后的結(jié)果。其結(jié)構(gòu)圖如下所示:
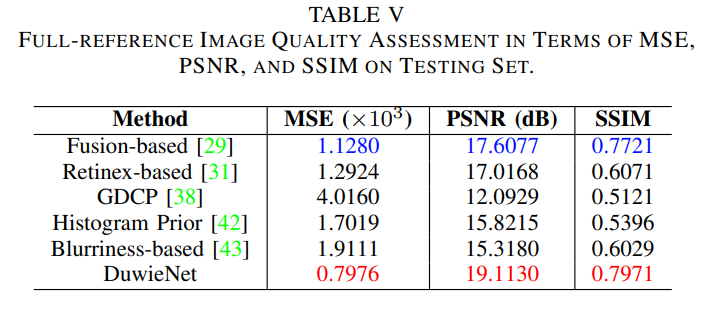
實(shí)驗(yàn)結(jié)果:
03 水下目標(biāo)檢測(cè)比賽的開(kāi)源方案
在去年的2020年全國(guó)水下機(jī)器人(湛江)大賽水下目標(biāo)檢測(cè)比賽眾多,部分選手公開(kāi)了他們的參賽方案,他們?cè)诒荣愔械慕?jīng)驗(yàn)這對(duì)我們研究水下目標(biāo)檢測(cè)具有很大的參考價(jià)值,下面我根據(jù)使用的檢測(cè)框架進(jìn)行分類(lèi),簡(jiǎn)單介紹其中的幾個(gè)開(kāi)源方案
3.1 mmdection
和鯨社區(qū)Kesci 水下目標(biāo)檢測(cè)算法賽(光學(xué)圖像賽項(xiàng))三等獎(jiǎng) 單模方案
代碼鏈接:https://github.com/milleniums/underwater-object-detection-mmdetection
方法簡(jiǎn)述:
使用兩階段檢測(cè)框架,保證精度要求;
使用FPN,增強(qiáng)小目標(biāo)的檢測(cè)效果;
使用Mixup、旋轉(zhuǎn)等無(wú)損的數(shù)據(jù)增強(qiáng)技術(shù),減輕網(wǎng)絡(luò)過(guò)擬合,并提升模型泛化能力;
使用多尺度訓(xùn)練與預(yù)測(cè),適應(yīng)圖片分辨率差異,可以讓參與訓(xùn)練的目標(biāo)大小分布更加均衡,使模型對(duì)目標(biāo)大小具有一定的魯棒性;
參考ResNet論文,使用Global Context ROI為每個(gè)候選框添加上下文信息,充分利用數(shù)據(jù)分布特點(diǎn),提升了檢測(cè)精度。
消融實(shí)驗(yàn):
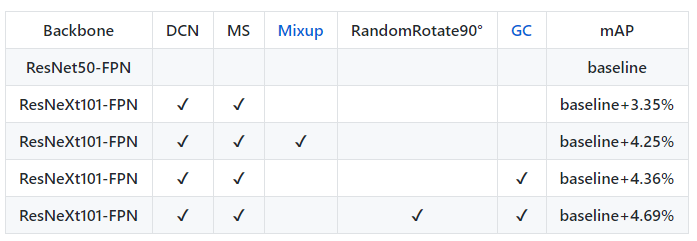
和鯨社區(qū)Kesci 水下目標(biāo)檢測(cè)算法賽(光學(xué)圖像賽項(xiàng))30(A榜) / 31(B榜)
代碼鏈接: https://github.com/Wakinguup/Underwater_detection
方法簡(jiǎn)述:
1、數(shù)據(jù)增強(qiáng):
采用Mixup、實(shí)例平衡增強(qiáng)、模糊(Median Blur和 Motion Blur)、Retinex、泊松融合、標(biāo)簽平滑。
2、模型框架:mmdetection代碼庫(kù)中的Cascade R-CNN模型,其中backbone是ResNeXt101-64x4d (64是基數(shù)Cardinality,X101的一個(gè)block的group數(shù)量。而4d是指bottleneck的寬度)。模型同時(shí)也搭配了FPN[3],增強(qiáng)模型對(duì)小目標(biāo)的檢測(cè)能力。
3.2 EfficientDet
EfficientDet訓(xùn)練水下目標(biāo)檢測(cè)數(shù)據(jù)集
代碼鏈接: https://github.com/DataXujing/EfficientDet_pytorch
方法簡(jiǎn)述:
這個(gè)使用EfficientDet進(jìn)行水下目標(biāo)檢測(cè),僅是baseline無(wú)任何tricks,Step by Step演示如何訓(xùn)練最近開(kāi)源的相對(duì)SOTA的Pytorch版的EfficientDet的訓(xùn)練,評(píng)估,推斷的過(guò)程。像paper中提到的一樣,我們并沒(méi)有使用任何數(shù)據(jù)增強(qiáng)或模型融合等后處理的trick來(lái)提高模型的精度,如果你想增加數(shù)據(jù)增強(qiáng)的策略可以在efficientdet/dataset.py中實(shí)現(xiàn);
3.3 YOLOV5
我們團(tuán)隊(duì)這次也參加了2021年全國(guó)水下機(jī)器人(湛江)大賽,為大家開(kāi)源了YOLOV5檢測(cè)的baseline
代碼:https://github.com/wangdongdut/Underwater-Object-Detection
04 總結(jié)
水下目標(biāo)檢測(cè)目前任然還是一個(gè)具有挑戰(zhàn)的領(lǐng)域, 相比于傳統(tǒng)圖像處理方法分多個(gè)步驟和環(huán)節(jié)處理檢測(cè)任務(wù), 基于深度學(xué)習(xí)的方法將其統(tǒng)一為端到端的特征提取和分類(lèi)。雖然水下目標(biāo)檢測(cè)技術(shù)已經(jīng)不斷地從學(xué)術(shù)研究走向成熟的工業(yè)應(yīng)用, 但是依然有一些需要解決的問(wèn)題。
編輯:jq
-
機(jī)器人
+關(guān)注
關(guān)注
213文章
31073瀏覽量
222181 -
數(shù)據(jù)
+關(guān)注
關(guān)注
8文章
7335瀏覽量
94755 -
目標(biāo)檢測(cè)
+關(guān)注
關(guān)注
0文章
233瀏覽量
16492
原文標(biāo)題:一文梳理水下目標(biāo)檢測(cè)方法
文章出處:【微信號(hào):cas-ciomp,微信公眾號(hào):中科院長(zhǎng)春光機(jī)所】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
深海通信不“失聯(lián)”?這款超聲波換能器打破水下信息壁壘!


水下目標(biāo)智能識(shí)別系統(tǒng)平臺(tái)全面解析
一文帶你了解海凌科毫米波雷達(dá)

水下蛙人對(duì)講機(jī):基于 LED 藍(lán)光無(wú)線通信的水下語(yǔ)音新通道

水下目標(biāo)智能識(shí)別系統(tǒng)軟件平臺(tái)

一文帶你了解什么是機(jī)器視覺(jué)網(wǎng)卡

一文帶你了解電源測(cè)試系統(tǒng)的功能!

超聲波水下測(cè)距換能器:探索水下世界的“千里眼”
防水燈具好不好?水下燈具氣密性檢測(cè)儀測(cè)過(guò)才知道

揭秘水下噴泉燈氣密性檢測(cè)儀:守護(hù)水下照明的隱形衛(wèi)士
如何正確使用和維護(hù)水下燈具氣密性檢測(cè)儀

水下燈具氣密性檢測(cè)儀的使用方法

一文帶你了解工業(yè)計(jì)算機(jī)尺寸

帶你一文了解芯片開(kāi)封技術(shù)



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論