文章來源:雅名特自動(dòng)駕駛 近年來,深度學(xué)習(xí)技術(shù)在涉及高維非結(jié)構(gòu)化數(shù)據(jù)領(lǐng)域展現(xiàn)出了最先進(jìn)的性能,如計(jì)算機(jī)視覺、語音、自然語言處理等方面,并且開始涉及更大、更復(fù)雜的多模態(tài)信息問題。 不同傳感器在進(jìn)行
2023-10-09 16:23:19 3664
3664 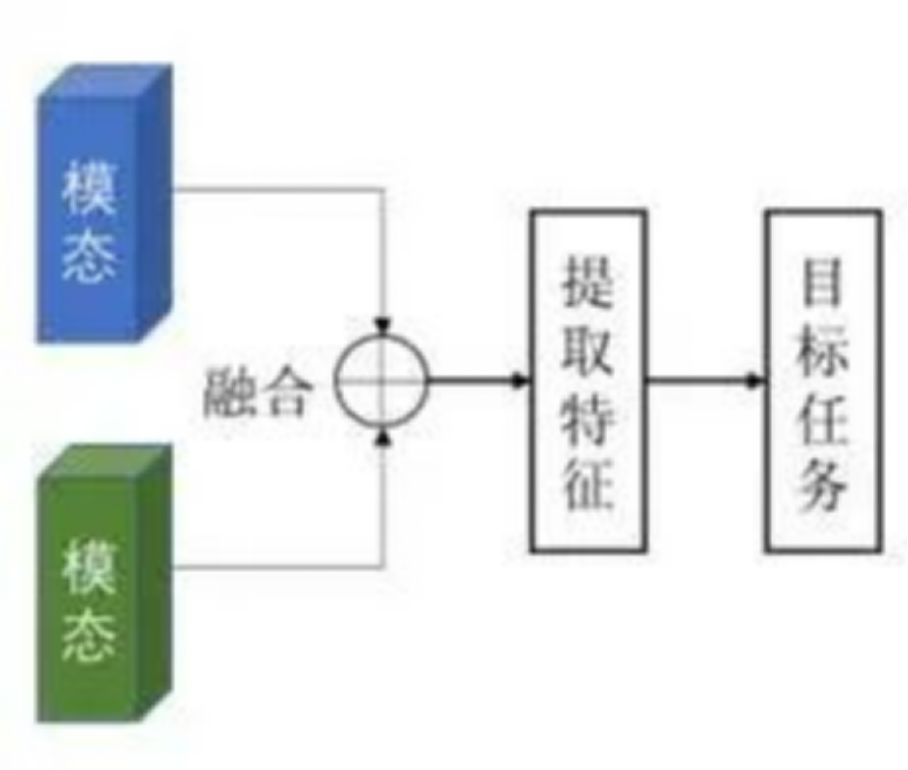
/understanding-multimodal-llms 在過去幾個(gè)月中, OpenVINO? 架構(gòu)師 Yury閱讀了眾多有關(guān)多模態(tài)大語言模型的論文和博客,在此基礎(chǔ)上,推薦了一篇解讀多模態(tài)大語言模型的最佳文章《Understand Multimodal LLMs》--
2024-12-02 18:29:022077 
多模態(tài)自動(dòng)駕駛混合渲染HRMAD,融合NeRF與3DGS技術(shù),實(shí)現(xiàn)超10萬㎡場(chǎng)景重建,多傳感器實(shí)時(shí)輸出,仿真更接近真實(shí)數(shù)據(jù)!然而,如何用高保真仿真場(chǎng)景快速驗(yàn)證自動(dòng)駕駛算法?HRMAD已集成至aiSim平臺(tái),端到端測(cè)試即刻開啟!
2025-03-26 16:05:344019 
持續(xù)討論。特別是在自動(dòng)駕駛領(lǐng)域,部分廠商開始嘗試將多模態(tài)大模型(MLLM)引入到感知、規(guī)劃與決策系統(tǒng),引發(fā)了“傳統(tǒng)深度學(xué)習(xí)是否已過時(shí)”的激烈爭(zhēng)論。然而,從技術(shù)原理、算力成本、安全需求與實(shí)際落地路徑等維度來看,Transformer與深度學(xué)習(xí)并非你死我活的替代
2025-08-13 09:15:594010 
安裝MATLAB2017A后發(fā)現(xiàn)找不到自動(dòng)駕駛工具箱是什么原因
2017-06-07 12:37:23
巨頭及零部件供應(yīng)商也紛紛涉足自動(dòng)駕駛。自動(dòng)駕駛汽車將成為未來最具發(fā)展潛力的風(fēng)口行業(yè)。我國的“制造2025”規(guī)劃,對(duì)于汽車工業(yè)發(fā)展提出了明確的發(fā)展目標(biāo),即到2020年,掌握智能輔助駕駛總體技術(shù)及各項(xiàng)
2019-12-08 15:01:03
區(qū)域化應(yīng)用測(cè)試,為自動(dòng)駕駛時(shí)代來臨做好政策和數(shù)字基建支撐。 自動(dòng)駕駛汽車正步入技術(shù)發(fā)展成熟期,各國中央和地方***通過多種關(guān)鍵政策和投資決策,使其能夠在社會(huì)中實(shí)現(xiàn)安全有效的運(yùn)用。自動(dòng)駕駛汽車將推動(dòng)一場(chǎng)革命,提升社會(huì)和經(jīng)濟(jì)水平,促使道路更加安全。
2021-01-22 06:01:51
工作中,這樣能夠大幅提升自動(dòng)駕駛行業(yè)的發(fā)展速度,加速自動(dòng)駕駛汽車走進(jìn)我們的日常生活。AutonomouStuff CEO Robert Hambrick 除了Apollo1.0,未來百度將持續(xù)不斷地
2017-07-07 18:28:50
隨著電動(dòng)車的EE架構(gòu)從分布式向集中式演進(jìn)、自動(dòng)駕駛等級(jí)從L2向L2+、NOA/NOP乃至L4演進(jìn),系統(tǒng)對(duì)自動(dòng)駕駛OS(操作系統(tǒng))的要求也越來越高。并且,由于事關(guān)生命安全,自動(dòng)駕駛OS對(duì)實(shí)時(shí)性及可靠性
2021-07-27 07:48:59
的帶寬有了更高的要求。從而使用以太網(wǎng)技術(shù)及中央域控制(Domain)和區(qū)域控制(Zonal)架構(gòu)是下一代車載網(wǎng)絡(luò)的發(fā)展方向。然而對(duì)于自動(dòng)駕駛技術(shù)的實(shí)現(xiàn),涉及到感知、規(guī)劃、執(zhí)行三個(gè)層面。由于車輛行...
2021-09-03 08:31:28
特斯拉在五月份發(fā)生的自動(dòng)駕駛事故,和最近在Defcon上演示的如何干擾傳感器,都充分說明了傳感器在自動(dòng)駕駛中的重要性:環(huán)境感知是自動(dòng)駕駛實(shí)現(xiàn)的基礎(chǔ),如果不能正確地感知周圍環(huán)境,那么接下來的認(rèn)知、決策與控制,都是空中樓臺(tái)。
2020-05-14 07:34:45
對(duì)環(huán)境和擁堵產(chǎn)生積極影響。市場(chǎng)調(diào)研公司ABI Research預(yù)測(cè):到2030年,道路上四分之一的汽車將會(huì)是自動(dòng)駕駛汽車。行業(yè)專家已經(jīng)為自動(dòng)駕駛的發(fā)展定義了五個(gè)級(jí)別。 每個(gè)級(jí)別分別描述了汽車從駕駛
2019-08-07 07:13:15
互相糾正以達(dá)到更精準(zhǔn)的效果。隨著自動(dòng)駕駛的發(fā)展,定位技術(shù)也一定會(huì)不斷優(yōu)化。一般來講,自動(dòng)駕駛實(shí)際包含三個(gè)問題:一是我在哪?二是我要去哪?三是如何去?能完整解決這三個(gè)問題就是真正的自動(dòng)駕駛。定位技術(shù)就是
2019-05-09 04:41:09
的車載處理器仍然將是半導(dǎo)體廠商在汽車電子領(lǐng)域的重點(diǎn)投資及發(fā)展方向。中國自動(dòng)駕駛面臨的挑戰(zhàn) 首先中國不同地域以及城鎮(zhèn)之間在道路基礎(chǔ)設(shè)施方面存在差異,包括路標(biāo)、車道線、紅綠燈等設(shè)置各有不同。中國特色
2017-06-08 15:25:32
自動(dòng)駕駛面臨的主要挑戰(zhàn)是基于圖像的機(jī)器學(xué)習(xí)能力。 理論上,基于圖像的機(jī)器學(xué)習(xí)可以讓汽車實(shí)現(xiàn)
自動(dòng)駕駛,但在實(shí)際技術(shù)
發(fā)展方面,仍有很多問題無法解決。例如現(xiàn)在特斯拉的輔助
駕駛只能在高速公路上使用,因?yàn)樵诜?/div>
2016-07-21 09:00:38
:自動(dòng)駕駛系統(tǒng):量產(chǎn)導(dǎo)向還是性能導(dǎo)向, 自動(dòng)駕駛系列報(bào)告三:車載芯片篇,自動(dòng)駕駛芯片,GPU的現(xiàn)在和ASIC的未來, 自動(dòng)駕駛系列報(bào)告之四:傳感器篇,多傳感器融合自動(dòng)駕駛系列報(bào)告之五:控制執(zhí)行篇,轉(zhuǎn)向制動(dòng)電子需要報(bào)告的關(guān)注微信公眾號(hào):AI汽車人回復(fù)“自動(dòng)駕駛報(bào)告”領(lǐng)取`
2019-08-09 17:14:24
Geiger 的研究主要集中在用于自動(dòng)駕駛系統(tǒng)的三維視覺理解、分割、重建、材質(zhì)與動(dòng)作估計(jì)等方面。他主導(dǎo)了自動(dòng)駕駛領(lǐng)域著名數(shù)據(jù)集 KITTI 及多項(xiàng)自動(dòng)駕駛計(jì)算機(jī)視覺任務(wù)的基準(zhǔn)體系建設(shè),KITTI 是目前最大的用于自動(dòng)駕駛的計(jì)算機(jī)視覺公開數(shù)據(jù)集。
2020-07-30 06:49:20
作者:余貴珍、周彬、王陽、周亦威、白宇目錄第一章 自動(dòng)駕駛系統(tǒng)概述1.1 自動(dòng)駕駛系統(tǒng)架構(gòu)1.1.1 自動(dòng)駕駛系統(tǒng)的三個(gè)層級(jí)1.1.2 自動(dòng)駕駛系統(tǒng)的基本技術(shù)架構(gòu)1.2 自動(dòng)駕駛技術(shù)國內(nèi)外發(fā)展1.3
2021-08-30 08:36:23
滿足自動(dòng)駕駛遠(yuǎn)程遙控的線控底盤整車控制器VCU1 自動(dòng)駕駛線控底盤VCU功能介紹滿足自動(dòng)駕駛及遙控駕駛的線控底盤整車控制器VCU作為新能源及自動(dòng)駕駛電動(dòng)汽車的核心主控制單元,通過硬線或CAN等方式
2021-09-07 06:30:56
專業(yè)的自動(dòng)駕駛行業(yè)報(bào)告-國金證券
2020-09-02 17:26:45
隨著高精度傳感、自動(dòng)化、人工智能等技術(shù)的飛速發(fā)展,預(yù)計(jì)到2021年市場(chǎng)上會(huì)出現(xiàn)第一批完全沒有方向盤等駕駛控制器的自動(dòng)駕駛量產(chǎn)車。當(dāng)汽車可以自主地完成駕駛任務(wù)時(shí),汽車的內(nèi)飾和交互設(shè)計(jì)將具有更多想象空間
2020-07-30 07:57:43
自動(dòng)駕駛車輛中采用的AI算法自動(dòng)駕駛車輛中AI面臨的挑戰(zhàn)
2021-02-22 06:39:55
ADAS到自動(dòng)駕駛還有多長(zhǎng)的路要走?
2020-12-10 07:03:08
正與新的移動(dòng)商業(yè)模式一起蓬勃發(fā)展。本次以人工智能作為自動(dòng)駕駛核心的國際AI自動(dòng)駕駛高峰論壇將匯聚全球汽車行業(yè)和半導(dǎo)體行業(yè)的核心參與者,深度剖析人工智能在汽車領(lǐng)域的突出發(fā)展,預(yù)測(cè)人工智能駕駛的未來發(fā)展
2017-09-13 13:59:54
可以根據(jù)自動(dòng)駕駛系統(tǒng)的具體需求,通過編程來配置FPGA的邏輯功能和連接關(guān)系,以適應(yīng)不同的應(yīng)用場(chǎng)景和算法變化。這種靈活性使得FPGA能夠快速適應(yīng)自動(dòng)駕駛技術(shù)的快速發(fā)展和變化。
低延遲:
自動(dòng)駕駛系統(tǒng)
2024-07-29 17:11:14
控制。在視覺算法方面,F(xiàn)PGA利用自身并行處理和高速存儲(chǔ)器的特點(diǎn),極大地加快了算法的執(zhí)行速度,提高了運(yùn)算效率。
五、未來發(fā)展趨勢(shì)隨著自動(dòng)駕駛技術(shù)的不斷發(fā)展,F(xiàn)PGA在自動(dòng)駕駛領(lǐng)域的應(yīng)用將會(huì)更加廣泛
2024-07-29 17:09:16
LabVIEW開發(fā)自動(dòng)駕駛的雙目測(cè)距系統(tǒng)
隨著車輛駕駛技術(shù)的不斷發(fā)展,自動(dòng)駕駛技術(shù)正日益成為現(xiàn)實(shí)。從L2級(jí)別的輔助駕駛技術(shù)到L3級(jí)別的受條件約束的自動(dòng)駕駛技術(shù),車輛安全性和智能化水平正在不斷提升
2023-12-19 18:02:07
大仍是阻礙行業(yè)發(fā)展的主要因素。n 自動(dòng)駕駛的商業(yè)應(yīng)用包羅萬象的全能自動(dòng)駕駛系統(tǒng),就目前的技術(shù)條件來看還比較困難,包括傳統(tǒng)車企、技術(shù)公司、零部件供應(yīng)商以及運(yùn)營商在內(nèi)的所有行業(yè)人士以及意識(shí)到,無人車面臨
2018-12-14 17:30:15
,為車輛的行為決策和路徑規(guī)劃提供可靠的信息源。隨著自動(dòng)駕駛熱潮,眾多企業(yè)涌入環(huán)境感知技術(shù)產(chǎn)品的研究,目前已取得階段性進(jìn)展。但成本過高、技術(shù)不成熟、國內(nèi)外技術(shù)產(chǎn)品差距大仍是阻礙行業(yè)發(fā)展的主要因素。國內(nèi)
2020-11-18 14:15:16
為文章正文: 谷歌自動(dòng)駕駛汽車發(fā)展簡(jiǎn)史 谷歌2009年啟動(dòng)了自動(dòng)駕駛汽車項(xiàng)目,項(xiàng)目領(lǐng)導(dǎo)人是被稱作無人駕駛汽車奠基人的斯坦福大學(xué)教授塞巴斯蒂安·特倫(Sebastian Thrun)。在谷歌任職時(shí),特倫
2016-10-25 11:08:31
申請(qǐng)理由:很喜歡硬件功能完善的機(jī)器人,這款機(jī)器人上面的多種傳感器及器件均用過,超聲波傳感器和巡線傳感器還未接觸過,想了解下這種傳感器的靈敏度和精度,而且近年來自動(dòng)駕駛汽車興起,還希望借此做一款
2015-11-30 15:30:17
`特斯拉首起自動(dòng)駕駛致命車禍,自動(dòng)駕駛的冬天來了?“一個(gè)致命的事故一定是由多個(gè)小的錯(cuò)誤組成的。” 7月初,特斯拉發(fā)表博客敘述了NHTSA(美國國家公路交通安全管理局)正在著手調(diào)查第一起Tesla
2016-07-05 11:14:19
自動(dòng)駕駛汽車是依靠人工智能、視覺計(jì)算、雷達(dá)、監(jiān)控裝置和全球定位系統(tǒng)協(xié)同合作,讓電腦可以在沒有任何人類主動(dòng)的操作下,自動(dòng)安全地操作機(jī)動(dòng)車輛。據(jù)前瞻產(chǎn)業(yè)研究院《中國無人駕駛汽車行業(yè)發(fā)展前景預(yù)測(cè)與投資
2019-04-03 05:36:06
普及一下自動(dòng)駕駛知識(shí)點(diǎn)自動(dòng)駕駛分為6個(gè)等級(jí):Level 0:人工駕駛,無駕駛輔助系統(tǒng),僅提醒。Level 1:輔助人工駕駛,可實(shí)現(xiàn)單一的車速或轉(zhuǎn)向控制自動(dòng)化,仍由人工駕駛(如定速巡航、ACC
2020-06-08 07:00:00
從ADAS到自動(dòng)駕駛還有多長(zhǎng)的路要走看了就知道
2021-01-28 06:57:58
隨著自動(dòng)駕駛等前沿科技領(lǐng)域發(fā)展加速,傳感器的重要性和普及率也獲得了持續(xù)提升。面對(duì)傳感器在未來愈發(fā)廣闊的藍(lán)海“誘惑”,國內(nèi)企業(yè)亟需加強(qiáng)各領(lǐng)域合作,并積極引進(jìn)高端人才、完善培養(yǎng)體系,以獲得突破性的創(chuàng)新
2020-07-29 07:54:15
地圖如何幫助自動(dòng)駕駛汽車實(shí)現(xiàn)溝通?
2021-02-26 07:47:18
基于視覺的slam自動(dòng)駕駛,這是我們測(cè)試的視頻《基于slam算法的智能機(jī)器人》調(diào)研分析報(bào)告項(xiàng)目背景分析機(jī)器人曾經(jīng)是科幻電影中的形象,可目前已經(jīng)漸漸走入我們的生活。機(jī)器人技術(shù)以包含機(jī)械、電子、自動(dòng)
2021-08-09 09:37:34
從安全的角度看自動(dòng)駕駛
2021-01-25 06:42:46
自動(dòng)駕駛技術(shù)為人們勾勒出了一副美好的未來出行的畫面:坐上沒有方向盤的汽車,一覺睡到公司門口;甚至我們可能不再擁有一輛汽車,需要出門時(shí)共享自動(dòng)駕駛汽車會(huì)自己到來,送到目的地時(shí)會(huì)自行離開……不過自動(dòng)駕駛
2020-10-22 07:45:38
了全球范圍對(duì)自動(dòng)駕駛安全性的議論:如何讓自動(dòng)駕駛更加安全?真正上路前還要做哪些準(zhǔn)備?智能汽車成為全球汽車產(chǎn)業(yè)發(fā)展戰(zhàn)略方向參與測(cè)試的企業(yè)將通過道路測(cè)試來不斷驗(yàn)證自動(dòng)駕駛技術(shù)的成熟度駕車上班、購物、送孩子
2019-05-13 00:26:37
“無人駕駛”汽車普及也有相應(yīng)的“痛點(diǎn)”,包括法律法規(guī)、倫理問題、成本高企等。 無人駕駛汽車本質(zhì)上是一種具有高度人工智能的移動(dòng)式服務(wù)機(jī)器人,它與輔助駕駛、自動(dòng)駕駛汽車具有相關(guān)性,但在發(fā)展目的、核心技術(shù)
2017-09-28 16:50:52
駕駛的關(guān)鍵的是具備人類的感知能力,多傳感器融合感知正是自動(dòng)駕駛破局的關(guān)鍵。昱感微的雷視一體多傳感器融合方案就好像一雙比人眼更敏銳的眼睛,可以為自動(dòng)駕駛系統(tǒng)提供更豐富更精準(zhǔn)的視覺語言——目標(biāo)與環(huán)境的多
2024-04-11 10:26:51
(報(bào)告出品方/作者:國金證券,翟煒)報(bào)告綜述產(chǎn)業(yè)鏈與市場(chǎng)空間:當(dāng)前我國自動(dòng)駕駛正處于 L2 向 L3 級(jí)別轉(zhuǎn)化的階段,預(yù) 計(jì) 2025 年 L2.5 級(jí)別自動(dòng)駕駛車輛滲透率為 50%,2030 年
2021-08-27 07:21:36
請(qǐng)問各位老鳥我是新手汽車自動(dòng)駕駛技術(shù)是怎么回事,是用什么板子開發(fā)的需要應(yīng)用哪些技術(shù)和知識(shí)。提問題提得不是很好請(qǐng)各位見諒
2016-04-14 20:44:03
組合導(dǎo)航的精準(zhǔn)融合;信息融合:多傳感器如何進(jìn)行信息融合。三、未來的趨勢(shì)是什么?目前,由于各種原因,不同廠商對(duì)于自動(dòng)駕駛技術(shù)路線仍有爭(zhēng)議,所采用的傳感器組合方式也有側(cè)重。但是,對(duì)于未來發(fā)展趨勢(shì),業(yè)內(nèi)
2017-09-06 11:36:58
共同測(cè)試自動(dòng)駕駛汽車。有這么多粗壯的大腿,Lyft反超Uber簡(jiǎn)直指日可待,至少從目前的進(jìn)度來看,通用果然還是汽車領(lǐng)域最靠譜的隊(duì)友。加入未來汽車生態(tài)社區(qū),關(guān)注微信公眾號(hào):sanchewang????? ?????????? ?????
2017-06-14 18:34:08
浮點(diǎn)運(yùn)算的工作負(fù)荷,并在汽車應(yīng)用可接受的功耗水平上獲得實(shí)時(shí)的處理性能表現(xiàn)。隨著全自動(dòng)駕駛所需的計(jì)算技術(shù)的進(jìn)一步發(fā)展,對(duì)關(guān)鍵功能進(jìn)行加速的策略才能保證這些系統(tǒng)得到廣泛應(yīng)用。利用被稱為 CDNN 的框架
2017-12-21 17:11:34
`事實(shí)上,早在1925年就出現(xiàn)第一臺(tái)自動(dòng)駕駛概念車,但為什么直至最近無人車才不再被視為科幻小說,而是眼下將實(shí)現(xiàn)的革命性科技產(chǎn)品?追其原因,主要在于,人工智能的顯著進(jìn)展,以及開發(fā)無人車的所需技術(shù)和硬件
2017-05-15 17:49:20
隨著自動(dòng)駕駛的快速發(fā)展,新技術(shù)逐漸涌現(xiàn),通信技術(shù)被產(chǎn)業(yè)認(rèn)為是未來網(wǎng)聯(lián)化自動(dòng)駕駛發(fā)展的關(guān)鍵技術(shù)。從通信角度出發(fā),分析通信技術(shù)為自動(dòng)駕駛在技術(shù)及可靠性、成本控制、以及社會(huì)效益方面帶來的提升,詳細(xì)介紹
2021-01-12 15:42:00
技術(shù)發(fā)展已經(jīng)不是實(shí)現(xiàn)自動(dòng)駕駛汽車的最大阻礙。 舉例來說,當(dāng)無人自動(dòng)駕駛汽車處于行駛狀態(tài),從自動(dòng)駕駛模式切換回手動(dòng)駕駛模式會(huì)有轉(zhuǎn)換期,轉(zhuǎn)換期會(huì)讓行駛延續(xù)性有所沖突,雖能透過程序設(shè)計(jì)來避免這個(gè)問題發(fā)生,但機(jī)器
2020-08-26 06:45:07
為什么視覺系統(tǒng)對(duì)自動(dòng)駕駛至關(guān)重要?
2021-01-25 07:51:32
基于樹莓派的人工智能自動(dòng)駕駛小車
2020-11-25 07:22:30
激光雷達(dá)是如何產(chǎn)生的?激光雷達(dá)在自動(dòng)駕駛領(lǐng)域有什么作用?
2021-06-17 07:31:54
看到新聞報(bào)道說谷歌自動(dòng)駕駛汽車已經(jīng)行駛近30萬公里了,非常的強(qiáng)大~~上次參加了重慶新能源汽車峰會(huì),對(duì)會(huì)上富士通半導(dǎo)體宣講的一款全景視頻汽車實(shí)時(shí)監(jiān)控技術(shù)平臺(tái)似乎看到了自動(dòng)駕駛的影子(利用MB86R11
2011-06-14 16:15:27
車聯(lián)網(wǎng)與智能駕駛車聯(lián)網(wǎng)和自動(dòng)駕駛密切相關(guān),很大程度上可以理解為是對(duì)自動(dòng)駕駛高階版本的增強(qiáng)和補(bǔ)充,通過車與車、車與人、車與交通基礎(chǔ)設(shè)施、車與網(wǎng)絡(luò)的互聯(lián)互通,讓對(duì)環(huán)境已經(jīng)具備感知能力的自動(dòng)駕駛汽車,再
2019-03-19 06:20:10
有時(shí)更快的數(shù)據(jù)處理是一種奢侈——有時(shí)它生死攸關(guān)。例如,自動(dòng)駕駛汽車本質(zhì)上是一臺(tái)裝有輪子的高性能計(jì)算機(jī),它通過大量的傳感器來收集數(shù)據(jù)。為了使得這些車輛能夠安全可靠地運(yùn)行,它們需要立即對(duì)周圍的環(huán)境做出
2021-07-12 08:07:05
從傳感器技術(shù)發(fā)展本身來說,要在接下來十年里保證自動(dòng)駕駛車安全地上路,硬件性能與背后的軟件算法,以及不同傳感器之間的數(shù)據(jù)融合,都是需要提升的地方。
2020-05-18 06:11:57
就是另外一回事了。此外,發(fā)生碰撞時(shí)的責(zé)任問題還將需要仔細(xì)核實(shí),因?yàn)榭赡懿辉贍砍兜饺说膯栴}(我們通常是犯錯(cuò)誤或違法的群體)。理想情況下,路上的所有汽車都將具備自動(dòng)駕駛功能。可惜這可能需要幾代汽車發(fā)展才能
2018-09-14 11:03:54
交通環(huán)境的建模與仿真,覆蓋從道路網(wǎng)絡(luò)設(shè)計(jì)、動(dòng)態(tài)場(chǎng)景配置到多傳感器仿真的全流程,支持自動(dòng)駕駛系統(tǒng)在模型在環(huán)(MiL)軟件在環(huán)(SiL)、硬件在環(huán)(HiL)、駕駛員在環(huán)
2025-04-28 12:09:40
本報(bào)告對(duì)自動(dòng)駕駛的發(fā)展歷程、產(chǎn)業(yè)鏈圖譜、市場(chǎng)規(guī)模態(tài)勢(shì)及國內(nèi)外廠家的布局進(jìn)行了詳細(xì)的闡述和分析。
2018-11-08 11:03:0715808 這是一個(gè)利用紅外線設(shè)備解決自動(dòng)駕駛夜間識(shí)別率低問題的多模態(tài)傳感系統(tǒng)。
2019-07-06 11:41:273512 自動(dòng)駕駛汽車的發(fā)展正在放緩:Waymo的自動(dòng)駕駛部署步伐慢于預(yù)期,Cruise推遲在舊金山部署自動(dòng)駕駛出租車。
2020-01-10 11:14:48938 近日,北京亦莊融媒體中心走進(jìn)主線科技,與CEO張?zhí)炖撞┦空归_精彩對(duì)話。在對(duì)話中,張?zhí)炖撞┦糠窒砹酥骶€科技創(chuàng)業(yè)歷程、自動(dòng)駕駛卡車技術(shù)發(fā)展難點(diǎn)與商業(yè)化戰(zhàn)略,以及如何在經(jīng)開區(qū)政策指引與扶持下,共同建設(shè)示范區(qū),打造自動(dòng)駕駛物流新產(chǎn)業(yè)的發(fā)展思路。新聞報(bào)道登上多個(gè)主流媒體渠道,得到廣泛關(guān)注。
2021-03-15 14:53:493767 談到激光雷達(dá)上車,就肯定不能離開自動(dòng)駕駛。自動(dòng)駕駛的起源,來自于計(jì)算機(jī)視覺技術(shù)的發(fā)展,早在1977年,日本國家實(shí)驗(yàn)室就利用攝像頭檢測(cè)前方標(biāo)記,實(shí)現(xiàn)自動(dòng)駕駛車輛的導(dǎo)航,不過這只是實(shí)現(xiàn)自動(dòng)駕駛的一種方式。
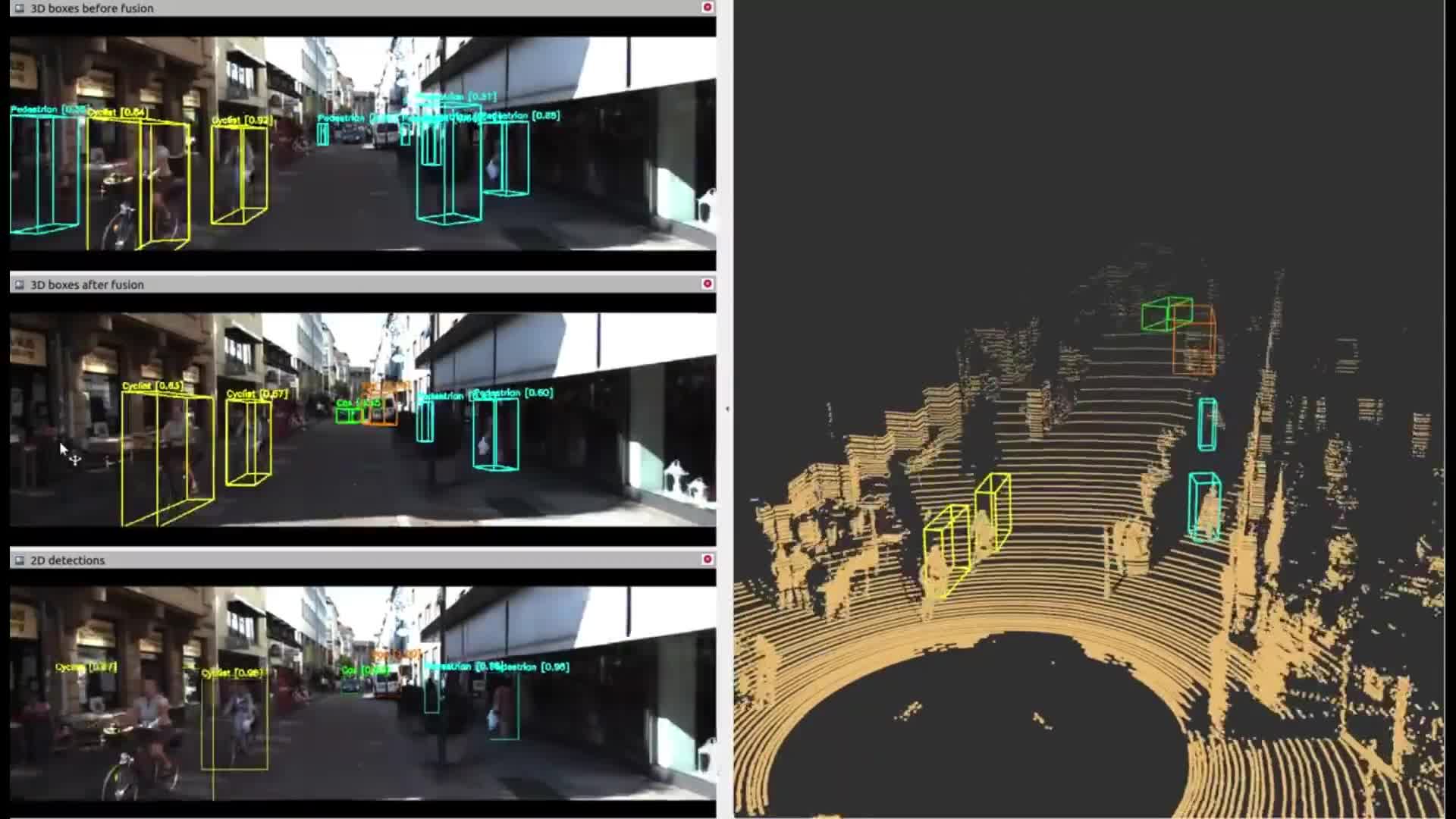
2023-02-09 14:22:381611 了許多解決深度多模態(tài)感知問題的方法。
然而,對(duì)于網(wǎng)絡(luò)架構(gòu)的設(shè)計(jì),并沒有通用的指導(dǎo)方針,關(guān)于“融合什么”、“何時(shí)融合”和“如何融合”的問題仍然沒有定論。本文系統(tǒng)地總結(jié)了自動(dòng)駕駛
中深度多模態(tài)目標(biāo)檢測(cè)和語義分割的方法,
2023-06-06 10:37:11 0
0 隨著 GPT-4 和 Stable Diffusion 等模型多模態(tài)能力的突飛猛進(jìn),多模態(tài)大模型已經(jīng)成為大模型邁向通用人工智能(AGI)目標(biāo)的下一個(gè)前沿焦點(diǎn)。總體而言,面向圖像和文本的多模態(tài)生成能力
2023-07-10 10:05:011255 
當(dāng)前學(xué)界和工業(yè)界都對(duì)多模態(tài)大模型研究熱情高漲。去年,谷歌的 Deepmind 發(fā)布了多模態(tài)視覺語言模型 Flamingo ,它使用單一視覺語言模型處理多項(xiàng)任務(wù),在多模態(tài)大模型領(lǐng)域保持較高
2023-07-16 20:45:021370 
人工智能大模型與自動(dòng)駕駛技術(shù)有著天然的契合度,因?yàn)樗鼈兌夹枰幚砗A俊⒍嗑S、多模態(tài)的數(shù)據(jù),并且都需要實(shí)現(xiàn)端到端的學(xué)習(xí)和推理。人工智能大模型可以通過對(duì)車載傳感器、路況信息、地圖數(shù)據(jù)等多源數(shù)據(jù)的融合分析,實(shí)現(xiàn)對(duì)自動(dòng)駕駛場(chǎng)景的深度理解和預(yù)測(cè)
2023-08-08 16:07:201061 華為盤古大模型如何賦能自動(dòng)駕駛?? 隨著智能時(shí)代的到來,自動(dòng)駕駛已成為許多汽車制造商和科技公司的追求,華為作為智能時(shí)代的領(lǐng)導(dǎo)者之一,自然也積極布局并投入大量資源研發(fā)自動(dòng)駕駛技術(shù)。而華為盤古大模型
2023-08-31 10:18:482837 世界之外,一定會(huì)重構(gòu)物理世界,自動(dòng)駕駛就是大模型重構(gòu)物理世界的一個(gè)典型應(yīng)用。”李彥宏表示,大模型將會(huì)讓百度的自動(dòng)駕駛能力超越經(jīng)驗(yàn)系統(tǒng),更聰明處理復(fù)雜場(chǎng)景,實(shí)現(xiàn)更廣泛的時(shí)空覆蓋。 作為整個(gè)發(fā)布會(huì)的驚喜彩蛋,百度集團(tuán)資深副總裁、智
2023-10-18 19:20:011060 
不同于單模態(tài)模型編輯,多模態(tài)模型編輯需要考慮更多的模態(tài)信息。文章出發(fā)點(diǎn)依然從單模態(tài)模型編輯入手,將單模態(tài)模型編輯拓展到多模態(tài)模型編輯,主要從以下三個(gè)方面:可靠性(Reliability),穩(wěn)定性(Locality)和泛化性(Generality)。
2023-11-09 14:53:221018 
ByteDance Research 基于開源的多模態(tài)語言視覺大模型 OpenFlamingo 開發(fā)了開源、易用的 RoboFlamingo 機(jī)器人操作模型,只用單機(jī)就可以訓(xùn)練。
2024-01-19 11:43:08944 
韓國互聯(lián)網(wǎng)巨頭Kakao最近宣布開發(fā)了一種名為“蜜蜂”(Honeybee)的多模態(tài)大型語言模型。這種創(chuàng)新模型能夠同時(shí)理解和處理圖像和文本數(shù)據(jù),為更豐富的交互和查詢響應(yīng)提供了可能性。
2024-01-19 16:11:201271 隨著科技的飛速進(jìn)步,自動(dòng)駕駛汽車已經(jīng)從科幻概念逐漸轉(zhuǎn)變?yōu)楝F(xiàn)實(shí)。然而,在其蓬勃發(fā)展的背后,自動(dòng)駕駛汽車仍面臨一系列亟待解決的問題和挑戰(zhàn)。本文將對(duì)這些問題進(jìn)行深入的剖析,并提出相應(yīng)的解決方案,以期為未來自動(dòng)駕駛
2024-03-14 08:38:012133 智能駕駛大模型是近年來人工智能領(lǐng)域和自動(dòng)駕駛領(lǐng)域最為前沿的研究方向之一,它融合了深度學(xué)習(xí)、多模態(tài)融合、世界模型構(gòu)建等多種技術(shù),有望顯著提升自動(dòng)駕駛系統(tǒng)的性能和魯棒性。
2024-05-07 17:20:323011 
邁新步,為其機(jī)器人出租車業(yè)務(wù)引入了一種基于谷歌多模態(tài)大語言模型(MLLM)“Gemini”的全新訓(xùn)練模型——“端到端多模態(tài)自動(dòng)駕駛模型”(EMMA)。
2024-10-31 16:55:012496 /understanding-multimodal-llms ? 《一文理解多模態(tài)大語言模型 - 上》介紹了什么是多模態(tài)大語言模型,以及構(gòu)建多模態(tài) LLM 有兩種主要方式之一:統(tǒng)一嵌入解碼器架構(gòu)(Unified Embedding Decoder Architecture)。本
2024-12-03 15:18:041110 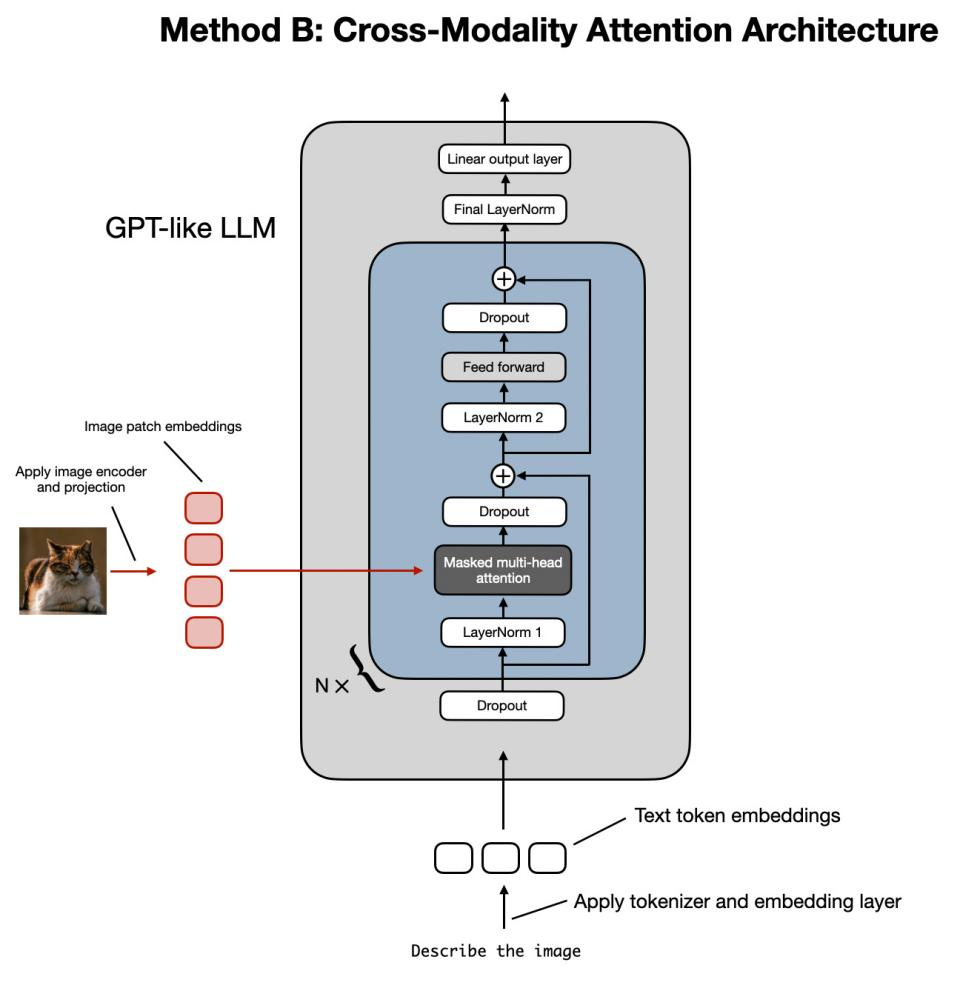
黑芝麻智能宣布與Nullmax共同發(fā)布基于華山系列最新一代芯片A2000的多模態(tài)大模型智駕方案,以創(chuàng)新獨(dú)特的端到端技術(shù)架構(gòu)和高性能自動(dòng)駕駛SoC,打造面向全場(chǎng)景的新一代自動(dòng)駕駛應(yīng)用。
2025-01-09 09:51:371228 自動(dòng)駕駛軌跡規(guī)劃往往采用直接回歸軌跡的方法,這種方式雖在測(cè)試中能取得不錯(cuò)的性能,可直接輸出當(dāng)前場(chǎng)景下最有可能的軌跡或控制,但它難以對(duì)自動(dòng)駕駛場(chǎng)景中常見的多模態(tài)動(dòng)作分布進(jìn)行有效建模。
2025-03-18 17:59:051322 
近年來,人工智能技術(shù)迅速發(fā)展,大規(guī)模深度學(xué)習(xí)模型(即大模型)在自然語言處理、計(jì)算機(jī)視覺、語音識(shí)別以及自動(dòng)駕駛等多個(gè)領(lǐng)域取得了突破性進(jìn)展。自動(dòng)駕駛作為未來智能交通的重要方向,其核心技術(shù)之一便是對(duì)海量
2025-03-28 09:16:231097 [首發(fā)于智駕最前沿微信公眾號(hào)]近年來,人工智能技術(shù)正以前所未有的速度在各個(gè)領(lǐng)域滲透與應(yīng)用,而大模型(大語言模型和多模態(tài)大模型)的迅猛發(fā)展為自動(dòng)駕駛技術(shù)帶來了新的機(jī)遇。傳統(tǒng)的自動(dòng)駕駛決策系統(tǒng)往往依賴于
2025-04-20 13:16:55836 
[首發(fā)于智駕最前沿微信公眾號(hào)]隨著自動(dòng)駕駛技術(shù)發(fā)展,其實(shí)現(xiàn)路徑也呈現(xiàn)出兩種趨勢(shì),一邊是以理想、小鵬、小米為代表的VLA(視覺—語言—行動(dòng))模型路線;另一邊則是以華為、蔚來為主導(dǎo)的世界模型(World
2025-11-05 08:55:38575 
 電子發(fā)燒友App
電子發(fā)燒友App








 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論