 蘋果解決無人車安全新專利,專為夜間自動駕駛研發的多模態傳感系統
蘋果解決無人車安全新專利,專為夜間自動駕駛研發的多模態傳感系統

近日,媒體報道稱,美國專利商標局公布了蘋果公司自動駕駛的一項專利申請,該專利為一種多模態傳感系統,可在自動駕駛車輛夜間行駛時,用于檢測和識別物體。
在該專利中,蘋果描述稱,與其他自動駕駛車輛計算視覺系統相比,該系統在操作上可以分成兩個部分,一部分操作可以增加有效探測范圍,對車輛路徑內或附近的物體進行探測和分類。
而另一部分則可以在低光照環境中更準確地對物體進行分類,從而改善自動駕駛汽車控制系統的安全性,并提高低光照環境中車輛的最大安全速度。
專為夜間自動駕駛研發的多模態傳感系統
業內皆知,感知、決策、控制是自動駕駛的三個環節,感知環節用來采集周圍環境的基本信息,也是自動駕駛的基礎。自動駕駛汽車通過傳感器來感知環境,傳感器就如同汽車的眼睛。
雖然現階段諸如攝像頭、激光雷達、超聲波雷達、毫米雷達等傳感器的發展比較先進,但是,在夜間或是低光照環境下,仍然會對自動駕駛車輛的控制系統造成挑戰。
如,相關的法律法規對對汽車前照燈在夜間的照明水平進行了限制,這在一定程度上也顯示了諸如攝像頭等可見光傳感器的有效探測范圍,而該類傳感器通常是用于探測車輛路徑內或附近的物體。
也就是說,對于自動駕駛汽車而言,有效的探測范圍可能會影響物體探測和分類,這也就會降低車輛的安全性以及安全行駛速度。
此外,當前有些自動化系統需要收集、處理大量傳感器數據,以便于識別周圍環境中的物體。然而,為了方便導航和對自動化系統進行強健控制,這些系統在處理傳感器數據時,經常會有延遲。
上述問題在現如今自動駕駛領域很是常見,而此次蘋果新申請的專利就是希望能夠解決上述問題。
蘋果的新專利,一句話就是結合各種互補的圖像傳感技術,從而解決自動駕駛系統在夜間或低光照環境內物體檢測和分類的難題。
具體來說,可以在汽車上安裝近紅外照明燈,以及帶有近紅外照明燈的近紅外傳感器。一方面,法律法規可能對此類照明燈的照明水平要求相對寬松,甚至沒有限制。另一方面來說,通過近紅外傳感器,可以捕獲車輛路徑內或路徑附近、及距車輛更長距離,如200米處的物體的高分辨率圖像信息。
雖然說可見光傳感器的探測范圍相對有限,但其可以提供多種顏色物體的高分辨率圖像數據。此外,可見光傳感器還可提供更廣闊的視野,探查車輛前方路徑。
如此一來,該系統就可以在車輛行駛時更早地探測和分類物體,從而提高安全性以及提高安全車速。
蘋果其他解決無人車安全問題的專利
雖然,現階段的蘋果自動駕駛仍是陪跑狀態,但是架不住其腦洞夠大,已經申請了各種類型的專利。
其中,在自動駕駛安全方面,除了上述專利之外,蘋果在去年還申請了一項可以讓自動駕駛車輛向其他駕駛員提供更多關于變道的信息,提前警告行車方向,以便會降低人類駕駛和自動駕駛車輛發生事故的可能性的專利。
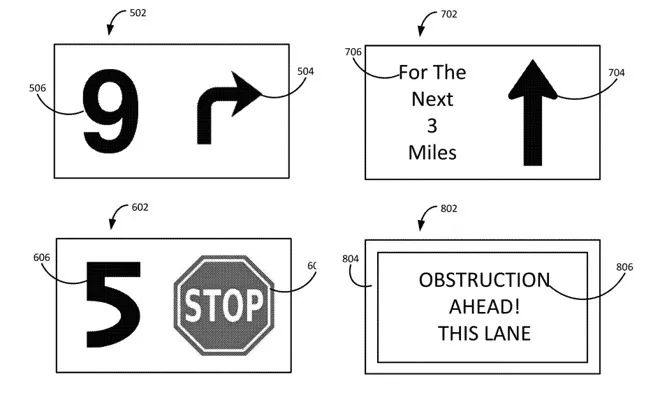
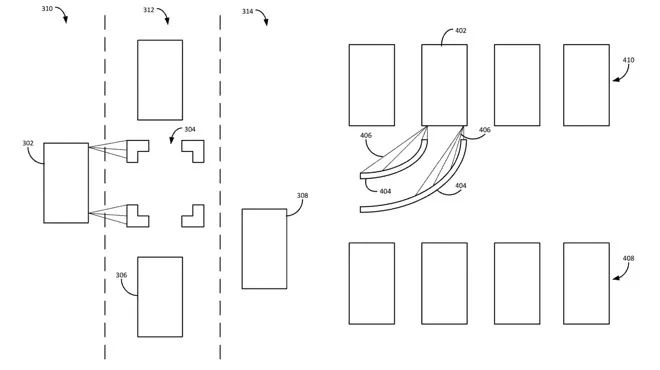
據悉,該專利可為其他駕駛員提供更多數據,還可預先計算路線,顯示下一動作的指示,提前提醒其他駕駛員。
其采用的通知系統不一定只是將提醒限于通知區域,其他道路使用者需要了解自動駕駛車輛的動作,如變道時,投影系統可以照亮車輛打算移動的道路區域,停車投影則會照亮車輛將要停的道路,防止行人走入該路。
該專利僅為去年美國向專利商標局就自動駕駛車輛系統提出的一系列專利之一。此前,蘋果提交的一份專利申請,顯示車輛如何根據觀察到的乘客壓力改變駕駛風格,除此之外,其提交的專利還包括車內手勢控制,以及車外警察和其他交通管理員的手勢控制等。
-
蘋果
+關注
關注
61文章
24600瀏覽量
208392 -
自動駕駛
+關注
關注
793文章
14887瀏覽量
179959
原文標題:蘋果自動駕駛新專利:用夜間傳感器解決無人車安全問題
文章出處:【微信號:IV_Technology,微信公眾號:智車科技】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
L4級自動駕駛數據采集系統首選
自動駕駛數據采集時間同步指南:方法、挑戰、場景與康謀解決方案
NVIDIA與Uber合作推進全球L4級自動駕駛移動出行網絡
中車電動助力成都自動駕駛公交示范線開跑
康謀分享 | 基于多傳感器數據的自動駕駛仿真確定性驗證

自動駕駛汽車是如何準確定位的?

搭建完整的ADAS測試鏈路,推動自動駕駛技術的安全發展
自動駕駛安全基石:ODD
經緯恒潤和白犀牛達成戰略合作,加速自動駕駛商業化進程

AI將如何改變自動駕駛?
自動駕駛大模型中常提的Token是個啥?對自動駕駛有何影響?
技術分享 |多模態自動駕駛混合渲染HRMAD:將NeRF和3DGS進行感知驗證和端到端AD測試

NVIDIA Halos自動駕駛汽車安全系統發布
端到端自動駕駛多模態軌跡生成方法GoalFlow解析



 工商網監
工商網監
評論