M-Bot由兩個全噴墨打印的柔性電子皮膚貼片組成,即e-skin-R(與機(jī)器人連接)和e-skin-H(與人體皮膚連接),e-skin-R由高性能多模態(tài)物理化學(xué)傳感器陣列組成,可以安裝在機(jī)器人手掌和手指上,e-skin-H由四個表面肌電信號(sEMG)電極陣列(通道)以及一對電刺激電極組成。
2022-07-10 11:53:33 2550
2550 將模型稱為 “視覺語言” 模型是什么意思?一個結(jié)合了視覺和語言模態(tài)的模型?但這到底是什么意思呢?
2023-03-03 09:49:371578 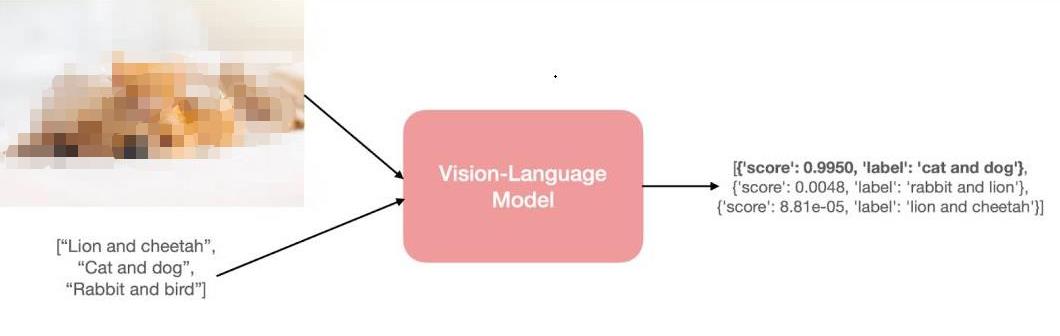
的、多用途的操作機(jī)。其工作的行為方式主要是通過完成沿著X、Y、Z軸上的線性運(yùn)動。多軸機(jī)器人又稱單軸機(jī)械手,工業(yè)機(jī)械臂,電缸等,是以XYZ直角坐標(biāo)系統(tǒng)為基本數(shù)學(xué)模型,以伺服電機(jī)、步進(jìn)電機(jī)為驅(qū)動的單軸機(jī)械臂為
2020-07-29 06:57:04
`機(jī)器人`
2015-08-09 12:23:02
有沒有機(jī)器人比較全的資料
2017-03-21 12:35:21
請各位大神指導(dǎo),移動式機(jī)器人是怎么做EMC保護(hù)的,機(jī)器人是鋰電池供電,所以就不能接大地了,那么對機(jī)器人的干擾是通過何種方式來釋放或轉(zhuǎn)移的?
2016-07-26 13:33:14
目前產(chǎn)業(yè)機(jī)器人僅能在嚴(yán)格定義的結(jié)構(gòu)化環(huán)境中執(zhí)行預(yù)定指令動作,缺乏對環(huán)境的感知與應(yīng)變能力,這極大地限制了機(jī)器人的應(yīng)用。利用機(jī)器人的視覺控制,不需要預(yù)先對產(chǎn)業(yè)機(jī)器人的運(yùn)動軌跡進(jìn)行示教或離線編程,可節(jié)約
2015-01-23 15:02:27
的運(yùn)動控制,通過使用視覺傳感器檢測到機(jī)器人位置的反饋。通過介紹它們的族譜大家有沒有明白了解呢?深圳四元數(shù)致力于運(yùn)動控制、圖像與視覺傳感等工業(yè)自動化技術(shù)的研發(fā)和應(yīng)用,產(chǎn)品廣泛應(yīng)用于印刷設(shè)備、模切設(shè)備、貼合設(shè)備、多軸數(shù)控設(shè)備、機(jī)械手、電子加工和檢測設(shè)備、激光加工設(shè)備、拋光機(jī)械生產(chǎn)自動化等工業(yè)控制領(lǐng)域。
2020-08-28 10:48:50
視覺系統(tǒng)成為研究的新課題。1965年, Stanford建立機(jī)器人實(shí)驗(yàn)室開始研究機(jī)器人。機(jī)器人的定義:【機(jī)器人】是一種可以用來移動材料,零件,工具或特定裝置的可以重新編程的多功能操...
2021-09-07 08:37:58
labview 視覺機(jī)器人抓取工件 CCD相機(jī)的二維坐標(biāo)系的建立?希望分享,謝謝
2017-08-18 20:53:37
機(jī)器人的參考手冊,也可供廣大青少年競技機(jī)器人愛好者閱讀參考。機(jī)器人C語言機(jī)電一體化接口有視覺機(jī)器人制作機(jī)器人競賽指南機(jī)器人制作寶典機(jī)器人組裝大全自律型機(jī)器人制作外圍接口控制用微機(jī)入門機(jī)器人集錦邏輯集成電路
2015-02-22 07:34:56
機(jī)器人的運(yùn)動原理還是屬于最基本的簡單機(jī)械。機(jī)器人運(yùn)動主要是依靠什么裝置?有些什么裝置是機(jī)器人用的比較多的?
2015-02-03 11:22:01
列舉部分學(xué)習(xí)過程中接觸的部分書籍,部分有中文版,部分有更新版本。1.機(jī)器人基礎(chǔ)書籍適合入門的書籍:機(jī)器人學(xué)機(jī)器人建模規(guī)劃與控制機(jī)器人學(xué)、機(jī)器視覺與控制——MATLAB算法基礎(chǔ)機(jī)器人學(xué)導(dǎo)論——分析控制
2019-05-22 06:53:10
想弄一個vi可以動態(tài)顯示機(jī)器人的姿態(tài),但不知道有什么函數(shù)可以引入機(jī)器人的模型,幫幫忙,謝謝。
2012-02-11 17:25:22
機(jī)器人的定義是什么?機(jī)器人優(yōu)點(diǎn)和缺點(diǎn)是什么?機(jī)器人是由哪些部分組成的?工業(yè)機(jī)器人的應(yīng)用有哪些?
2021-07-05 06:48:21
機(jī)器人視覺可使工業(yè)機(jī)器人擁有感知和決策能力,以適應(yīng)更多“機(jī)器換人”的生產(chǎn)場景。2. 工業(yè)機(jī)器人可通過雙目或多目技術(shù)、激光相機(jī)技術(shù)、三維傳感器技術(shù)等實(shí)現(xiàn)智能的視覺功能,進(jìn)而擺脫人為操控限制,大幅提高生產(chǎn)
2019-08-16 04:00:00
機(jī)器人的移動通常是從管理機(jī)器人總體任務(wù)進(jìn)度的中央處理器發(fā)出位置變化請求時開始的。導(dǎo)航系統(tǒng)通過制定行程計(jì)劃或軌跡以開始執(zhí)行位置變化請求。行程計(jì)劃需考慮可用路徑、已知障礙位置、機(jī)器人能力及任何相關(guān)的任務(wù)目標(biāo)。
2019-09-10 10:44:32
視覺技術(shù)是近幾十年來發(fā)展的一門新興技術(shù)。機(jī)器視覺可以代替人類的視覺從事檢驗(yàn)、目標(biāo)跟蹤、機(jī)器人導(dǎo)向等方面的工作,特別是在那些需要重復(fù)、迅速的從圖象中獲取精確信息的場合。
2019-09-04 08:00:27
安全,對一些特殊工種,如噴涂,鑄造等通過勞動法強(qiáng)制采用工業(yè)機(jī)器人來代替,這樣可以大大增加工業(yè)機(jī)器人的需求數(shù)量。視覺機(jī)器人我國的機(jī)器人產(chǎn)業(yè)化必須由市場來拉動,機(jī)器人作為高新技術(shù),它的發(fā)展與社會的生產(chǎn)、經(jīng)濟(jì)狀況
2016-09-08 10:34:05
金航標(biāo)kinghelm薩科微slkor總經(jīng)理宋仕強(qiáng)介紹說,薩科微Al大模型機(jī)器人有哪些的優(yōu)勢?薩科微AI大模型機(jī)器人由清華大學(xué)畢業(yè)的天才少年N博士和王博士團(tuán)隊(duì)開發(fā),與同行相比具有許多優(yōu)勢:語言
2024-07-05 08:52:55
各種傳感器和網(wǎng)絡(luò)服務(wù)器的無線通信,建立一個不斷檢測、更新周圍世界信息的機(jī)器人視覺模型。重要的是,這一套系統(tǒng)向第三方開發(fā)者開放。`
2015-01-22 10:04:11
語言教學(xué)機(jī)器人將C語言的各種表達(dá)式、語法、關(guān)鍵詞、邏輯結(jié)構(gòu)和數(shù)據(jù)類型等教學(xué)內(nèi)容融入到一系列循序漸進(jìn)的教學(xué)機(jī)器人制作和競賽項(xiàng)目中,直接在項(xiàng)目應(yīng)用和競賽過程中學(xué)習(xí)C語言,實(shí)現(xiàn)了“做中學(xué)、學(xué)中賽、賽中會
2016-03-28 11:24:04
本帖最后由 colorsky 于 2016-4-21 14:05 編輯
大家好,我是ColorSky。這是我的雙足機(jī)器人的開源項(xiàng)目。先發(fā)出視頻給大家看看,后面陸續(xù)會把技術(shù)資料上傳。機(jī)器人鞠躬動作機(jī)器人舞蹈1視頻機(jī)器人跳機(jī)器舞視頻
2016-04-21 10:51:28
LPC2106在足球機(jī)器人控制中的應(yīng)用設(shè)計(jì)足球機(jī)器人融合了計(jì)算機(jī)視覺、模式識別、決策對策、自動控制、無線通信、多智能體合作等多項(xiàng)摘要 技術(shù),具有極高的研究價值。本文設(shè)計(jì)了基于A R M 7微處理器
2009-03-28 14:03:25
針對傳統(tǒng)的物流分揀過程效率低、成本高的現(xiàn)狀以及利用機(jī)器視覺進(jìn)行分揀快速、可靠的優(yōu)點(diǎn)對機(jī)器視覺、圖像處理和Tiropd機(jī)器人進(jìn)行了研究基于LabVIEW設(shè)計(jì)了Tripod機(jī)器人視覺系統(tǒng)將分揀過程簡化
2019-06-01 06:00:00
求大神指導(dǎo)怎么做多足機(jī)器人的行走的動畫演示!!!
2017-04-23 11:36:56
NI VISION 與機(jī)器人做引導(dǎo)怎么樣實(shí)現(xiàn)手眼標(biāo)定好像沒有像其他視覺類似的函數(shù)...哪位大俠可以指點(diǎn)一二謝謝了
2018-04-09 15:35:20
ZN-RAI02工業(yè)機(jī)器人與視覺實(shí)訓(xùn)平臺是什么?ZN-RAI02工業(yè)機(jī)器人與視覺實(shí)訓(xùn)平臺有哪些技術(shù)性能?ZN-RAI02工業(yè)機(jī)器人與視覺實(shí)訓(xùn)平臺的結(jié)構(gòu)是由哪些部分組成的?ZN-RAI02工業(yè)機(jī)器人與視覺實(shí)訓(xùn)平臺有哪些配套軟件?
2021-08-09 06:22:03
` NAO機(jī)器人擁有著討人喜歡的外形。并具備有一定程度的人工智能和約一定程度的情感智商并能夠和人親切的互動。該機(jī)器人還如同真正的人類嬰兒一般擁有學(xué)習(xí)能力。NAO機(jī)器人還可以通過學(xué)習(xí)身體語言和表情來
2015-02-11 17:00:27
機(jī)器人在之前的機(jī)器人的基礎(chǔ)上,加入了可以自由便捷的運(yùn)動功能,兩個攝像頭精準(zhǔn)拍攝、全方位的視覺功能,還有一個超聲傳感器功能。傳感器可以識別人類和NAO機(jī)器人的接觸,從而做些動作和人類互動,所以說NAO機(jī)器人機(jī)器人真的可以讓我們體驗(yàn)到智能的時代。
2015-02-13 15:43:24
六足爬行機(jī)器人畢業(yè)時的作品,當(dāng)時還處于入門狀態(tài),c程序?qū)懙谋容^菜(程序?qū)懙谋容^亂,僅作參考),一直想把這個六足機(jī)器人作品優(yōu)化一下,可惜,一直在忙,現(xiàn)借助電路城這個平臺開源給大家,希望大家能繼續(xù)
2014-03-27 18:51:05
無論是傳統(tǒng)的工業(yè)機(jī)器人系統(tǒng),還是當(dāng)今最先進(jìn)的協(xié)作機(jī)器人(Cobot),它們都要依靠可生成大量高度可變數(shù)據(jù)的傳感器。這些數(shù)據(jù)有助于構(gòu)建更佳的機(jī)器學(xué)習(xí)(ML)和人工智能(AI)模型。而機(jī)器人依靠這些模型變得“自主”,可在動態(tài)的現(xiàn)實(shí)環(huán)境中做出實(shí)時決策和導(dǎo)航。
2020-08-05 07:08:21
醫(yī)療領(lǐng)域,手術(shù)輔助機(jī)器人需要毫米級的精確控制,書中有介紹基于視覺伺服的實(shí)時控制算法,以及如何利用大模型優(yōu)化手術(shù)路徑規(guī)劃。工業(yè)場景中,協(xié)作機(jī)器人面臨的主要挑戰(zhàn)是快速適應(yīng)新工藝流程。具身智能通過在線學(xué)習(xí)
2024-12-24 15:03:54
推薦課程:張飛軟硬開源:基于STM32的BLDC直流無刷電機(jī)驅(qū)動器(視頻+硬件)http://url.elecfans.com/u/73ad899cfd 中文名: 工業(yè)機(jī)器人作者: 蔣剛圖書分類
2016-06-01 13:12:46
申請理由:現(xiàn)在正在參與視覺機(jī)器人的項(xiàng)目,想了解更多的關(guān)于機(jī)器人的產(chǎn)品與知識。項(xiàng)目描述:水果采摘機(jī)器人:機(jī)器人尋找視野中的水果,并移動到相應(yīng)的位置,由機(jī)械臂進(jìn)行采摘水果并放到指定的位置。
2015-10-29 11:00:03
視覺巡線,展示了如何從數(shù)據(jù)采集、模型訓(xùn)練到機(jī)器人部署的完整流程。
值得注意的是,深度學(xué)習(xí)模型的實(shí)時性對機(jī)器人計(jì)算資源提出了較高要求,優(yōu)化模型(如TensorRT加速)是實(shí)際部署的關(guān)鍵。
二、SLAM
2025-05-03 19:41:47
。
多模態(tài)融合的創(chuàng)新與突破
機(jī)器人控制技術(shù)的另一個重要突破在于多模態(tài)大模型的應(yīng)用。相比于僅通過文字進(jìn)行人機(jī)交互的傳統(tǒng)方法,現(xiàn)代機(jī)器人能夠融合視覺、聲音、定位等多模態(tài)輸入信息,為任務(wù)執(zhí)行提供更加全面的感知
2024-12-29 23:04:07
`內(nèi)容簡介本書是關(guān)于機(jī)器人學(xué)和機(jī)器視覺的實(shí)用參考書, 第一部分“基礎(chǔ)知識”(第2章和第3章)介紹機(jī)器人及其操作對象的位置和姿態(tài)描述,以及機(jī)器人路徑和運(yùn)動的表示方法;第二部分“移動機(jī)器人”(第4章至第
2018-01-17 17:38:11
`內(nèi)容簡介本書是關(guān)于機(jī)器人學(xué)和機(jī)器視覺的實(shí)用參考書, 第一部分“基礎(chǔ)知識”(第2章和第3章)介紹機(jī)器人及其操作對象的位置和姿態(tài)描述,以及機(jī)器人路徑和運(yùn)動的表示方法;第二部分“移動機(jī)器人”(第4章至第
2018-04-08 18:19:42
項(xiàng)目名稱:基于機(jī)器視覺的工業(yè)機(jī)器人抓取工作站試用計(jì)劃:申請理由 本人是嘉興技師學(xué)院教師,浙江機(jī)器人有限公司技術(shù)顧問。在機(jī)器人領(lǐng)域有5年多的學(xué)習(xí)和開發(fā)經(jīng)驗(yàn),曾設(shè)參與多項(xiàng)工業(yè)機(jī)器人工作站的開發(fā)與調(diào)試
2019-09-18 19:24:11
拿到一個題目,視覺采摘機(jī)器人。目前對視覺處理方面毫無頭緒,由于條件有限,只做出概念實(shí)物。機(jī)器人只有達(dá)到識別該果蔬并采摘下來的效果。有沒有大神提供一下思路。
2018-04-10 09:22:27
什么是機(jī)器人控制系統(tǒng)?機(jī)器人的運(yùn)動控制系統(tǒng)包含哪些方面?機(jī)器人控制系統(tǒng)的基本功能有哪些?
2021-10-11 09:38:12
而已 這個很開源有必要買來學(xué)習(xí)嗎?還有樹莓派等。。。對我做機(jī)器人有幫助嗎?或者說以后發(fā)展需求還有一點(diǎn) 聽說很多機(jī)器人競賽都用樂高機(jī)器人套裝(嘻嘻這個是不是小兒科呢?還是另有緣由?) 現(xiàn)在很多東西
2016-01-19 13:44:49
工業(yè)機(jī)器人的四大特征是哪些?工業(yè)機(jī)器人是由哪些部分組成的?工業(yè)機(jī)器人是怎樣進(jìn)行劃分的?
2021-10-11 09:10:17
`華南機(jī)器人應(yīng)用培訓(xùn)中心擁有各種設(shè)備,開展各種不同的機(jī)器人培訓(xùn)班。打造各種工業(yè)現(xiàn)場常見的機(jī)器人工作站,現(xiàn)開展KUKA、發(fā)那科、三菱、ABB、愛普生工業(yè)機(jī)器人培訓(xùn)對外招生。 一、認(rèn)識機(jī)器人技術(shù):工業(yè)
2015-09-02 14:03:18
模式,逐漸向以工業(yè)機(jī)器人為主導(dǎo)的生產(chǎn)模式轉(zhuǎn)變。但是,隨著科技的發(fā)展和進(jìn)步,原有單純采用通過示教和預(yù)編程來實(shí)現(xiàn)自動化工作的機(jī)器人產(chǎn)品在柔性生產(chǎn)能力上已經(jīng)很難滿足現(xiàn)代生產(chǎn)的需要,引入具備機(jī)器視覺功能的機(jī)器人
2021-04-29 09:42:45
在當(dāng)今的機(jī)器人領(lǐng)域,基于視覺的人臉面部識別和檢測發(fā)展得非常之快,并且已經(jīng)運(yùn)用于很多領(lǐng)域。
2019-09-17 09:11:43
、體積和質(zhì)量小等要求,因此上位機(jī)選用PC104系統(tǒng),其軟件用C語言編程。采用USB攝像頭,采集機(jī)器人前方的視覺信息,為機(jī)器人視覺導(dǎo)航,路徑規(guī)劃提供依據(jù)。外設(shè)麥克和揚(yáng)聲器,當(dāng)機(jī)器人到達(dá)目標(biāo)點(diǎn)后,進(jìn)行導(dǎo)覽解說
2019-07-04 08:30:00
制造出像人一樣具有智能的能替代人類勞動的機(jī)器人,一直是人類的夢想,人類獲取的信息80%以上是通過視覺。因此,在智能機(jī)器人的研究中,具有視覺的機(jī)器人的研究也就成了第一位的。對機(jī)器人視覺伺服系統(tǒng)的研究是機(jī)器人領(lǐng)域中的重要內(nèi)容之一,其研究成果可應(yīng)用在機(jī)器人自動避障、軌跡跟蹤和運(yùn)動目標(biāo)跟蹤等問題中。
2019-09-27 08:07:35
全球80多個國家和地區(qū)。
近日,大象機(jī)器人聯(lián)合進(jìn)迭時空推出全球首款RISC-V全棧開源六軸機(jī)器臂“myCobot 280 RISC-V”,為開發(fā)者打造全新的機(jī)器人開源創(chuàng)新平臺。
“myCobot 280
2025-04-25 17:59:18
將Simulink模型與Lego機(jī)器人結(jié)合使用可提供令人愉悅的基于模型的設(shè)計(jì)體驗(yàn)支持LEGO MINDSTORMS NXT作為產(chǎn)品標(biāo)準(zhǔn)功能。即使沒有ECRobot NXT,您也可以玩樂高游戲
2021-12-20 07:15:51
ZNH-JR05Z型 工業(yè)機(jī)器人視覺裝配實(shí)訓(xùn)平臺一、概述ZNH-JR05Z型 工業(yè)機(jī)器人視覺裝配實(shí)訓(xùn)平臺由ZN-ZN605型工業(yè)機(jī)器人、ZN-ARA462型工業(yè)機(jī)器人、模塊化綜合平臺及各功能模組
2021-07-01 12:05:38
ZN-RAI02工業(yè)機(jī)器人與視覺實(shí)訓(xùn)平臺一、概述1、ZN-RAI02工業(yè)機(jī)器人與視覺實(shí)訓(xùn)平臺以工業(yè)機(jī)器人與機(jī)器視覺為核心,將機(jī)械、氣動、運(yùn)動控制、變頻調(diào)速、PLC控制技術(shù)有機(jī)地進(jìn)行整合,結(jié)構(gòu)
2021-07-01 06:38:35
教你如何從零做一個智能象棋機(jī)器人?怎樣去設(shè)計(jì)一個基于機(jī)器視覺與dobot的象棋機(jī)器人呢?
2021-12-23 06:22:11
卡爾曼濾波方法估計(jì)目標(biāo)的空間位置和運(yùn)動參數(shù)。 1 目標(biāo)成像的幾何模型 移動機(jī)器人視覺系統(tǒng)的坐標(biāo)關(guān)系如圖1 所示。 其中O-X Y Z 為世界坐標(biāo)系; O c - X cY cZ c 為攝像機(jī)
2019-06-01 08:00:00
在物流搬運(yùn)行業(yè),拳頭機(jī)器人由于其獨(dú)特的并聯(lián)結(jié)構(gòu),常用于高速整列、裝箱等場合。其中,拳頭機(jī)器人的視覺線跟蹤技術(shù)正得到廣泛的應(yīng)用,如下圖所示:
2020-08-06 06:30:31
關(guān)于ros智能機(jī)器人,就是一個寫智能機(jī)器人代碼的一個虛擬機(jī),
2021-10-13 19:20:16
機(jī)器人視覺傳感器詳解一種新型的工業(yè)機(jī)器人已經(jīng)走到行業(yè)的前沿, 他們的主要特點(diǎn)是能夠安全地協(xié)助人類工作。在網(wǎng)上有很多人談?wù)撍鼈儯阏J(rèn)真了解過它嗎?
2020-08-14 07:24:17
一種新型的工業(yè)機(jī)器人已經(jīng)走到行業(yè)的前沿, 他們的主要特點(diǎn)是能夠安全地協(xié)助人類工作。在網(wǎng)上有很多人談?wù)撍鼈儯阏J(rèn)真了解過它嗎?在2008年,很多人愛它們只是處于好奇心。在2012年,機(jī)器人被視為
2020-08-17 06:00:49
,在生產(chǎn)過程中,完成產(chǎn)品的組裝、抓取和放置,不僅可以大幅提高生產(chǎn)效率,而且還能提高準(zhǔn)確度,隨之提高產(chǎn)品的合格率,降低生產(chǎn)成本。因此,視覺引導(dǎo)的機(jī)器人應(yīng)運(yùn)而生。視覺引導(dǎo)的機(jī)器人,相當(dāng)于為機(jī)器人裝上了“眼睛
2016-02-03 10:20:33
` 本帖最后由 星希望532 于 2015-12-2 20:06 編輯
作品名稱:基于微型操作系統(tǒng)的智能多平臺控制語音機(jī)器人http://v.youku.com/v_show
2015-12-02 19:08:42
一.機(jī)器人導(dǎo)航算法工程師崗位職責(zé):1. 負(fù)責(zé)機(jī)器人視覺或激光雷達(dá)的SLAM算法的研發(fā)和優(yōu)化;2. 負(fù)責(zé)機(jī)器人自主導(dǎo)航定位算法的研發(fā),主要包括基于深度相機(jī)或激光雷達(dá)、IMU、里程計(jì)等多傳感器信息融合
2020-06-08 05:06:44
隨著計(jì)算機(jī)科學(xué)和自動控制技術(shù)的發(fā)展,越來越多的不同種類的智能機(jī)器人出現(xiàn)在工廠、生活當(dāng)中,機(jī)器人視覺系統(tǒng)作為智能機(jī)器人系統(tǒng)中一個重要的子系統(tǒng),也越來越受到人們的重視。它涉及了圖像處理、模式識別和視覺
2020-04-07 07:27:24
視覺系統(tǒng)的發(fā)展趨勢怎么樣?3D視覺系統(tǒng)應(yīng)用在哪些方面?未來的機(jī)器人3D視覺系統(tǒng)將會發(fā)生什么樣的變化?
2021-05-11 06:40:14
原來一直用AVR做簡單機(jī)器人,但是到后來機(jī)器人功能復(fù)雜了就不行了。現(xiàn)在想做有簡單視覺功能的小型機(jī)器人,沒有顯示屏,所以沒有GUI的問題。個子小(100mm*100mm*100mm以內(nèi)),重量輕
2020-06-19 09:00:20
]昨天 14:47 上傳內(nèi)容介紹《自律型機(jī)器人制作入門:基于Arduino》基于開源硬件思想,完全公開各個結(jié)構(gòu)件的外觀尺寸,控制板基于開源硬件領(lǐng)域內(nèi)廣泛使用的Arduino,采用在Arduino之上又封裝
2016-06-23 11:18:52
想用Labview做機(jī)器視覺,怎樣將Labview通過視覺算出的工件的偏移量以及偏移角度的值通過Profinet網(wǎng)絡(luò)賦于ABB機(jī)器人里的變量(變量類型:num)?
2016-10-31 13:15:38
我是新人,求幫助啊,明天需要提交輪式機(jī)器人應(yīng)用的報(bào)告,求大神給點(diǎn)建議,可用輪式機(jī)器人應(yīng)用于那些方面,要求實(shí)際可行,應(yīng)用于生活,農(nóng)業(yè),軍事都可以,謝謝啦
2013-04-17 16:32:16
。然而,立體視覺系統(tǒng)的難點(diǎn)是對應(yīng)點(diǎn)匹配的問題,該問題在很大程度上制約著立體視覺在機(jī)器人領(lǐng)域的應(yīng)用前景。多目視覺系統(tǒng)多目視覺系統(tǒng)。多目視覺系統(tǒng)采用三個或三個以上攝像機(jī),三目視覺系統(tǒng)居多,主要用來解決又目立體視覺
2018-12-13 21:23:57
基于DM642的機(jī)器人雙目視覺系統(tǒng)設(shè)計(jì)
2021-04-02 07:20:41
深圳泰科智能TB6-R10協(xié)作機(jī)器人是一款功能更強(qiáng)的工業(yè)級協(xié)作機(jī)器人,能夠勝任10KG的有效負(fù)載的自動化任務(wù),工作半徑可達(dá)1333mm,適用于大范圍、大負(fù)載的作業(yè)任務(wù),可應(yīng)用于工廠自動化、汽車、3C、醫(yī)療、電力、科研、教育等多個行業(yè)、多場景的自動化需求。
2023-04-17 16:36:37
邁步機(jī)器人H系列 是全球首款采用柔性驅(qū)動器作為動力輸出的外骨骼機(jī)器人。首創(chuàng)柔性驅(qū)動器作為動力輸出,實(shí)現(xiàn)主動式康復(fù)訓(xùn)練專利生物力學(xué)模型分析步態(tài),為用戶提供精準(zhǔn)、智能、個性化的康復(fù)訓(xùn)練方案前瞻性、多中心、隨機(jī)對照注冊臨床試驗(yàn),超百例樣本量,充分驗(yàn)證有效性和安全性
2023-09-20 17:25:48
產(chǎn)品介紹 ABB機(jī)器人產(chǎn)品線豐富,包括?多關(guān)節(jié)機(jī)器人、?協(xié)作機(jī)器人、?噴涂機(jī)器人、?SCARA機(jī)器人以及?自主移動機(jī)器人(?AMR)等?多關(guān)節(jié)機(jī)器人?:ABB的多關(guān)節(jié)機(jī)器人是六軸關(guān)節(jié)型
2024-09-30 17:56:07
產(chǎn)品簡介經(jīng)世智能CNC上下料復(fù)合機(jī)器人,復(fù)合機(jī)器人集成AGV+機(jī)械臂+視覺系統(tǒng),提供CNC多工序柔性上下料、CNC全自動刀具更換自動化解決方案,打通生產(chǎn)物流最后“一公里"。機(jī)器人機(jī)械臂末端可定制末端
2025-08-13 09:47:30
科義軌道式巡檢機(jī)器人:高精度智能巡檢解決方案精準(zhǔn)定位系統(tǒng):毫米級路徑控制技術(shù)科義軌道式巡檢機(jī)器人搭載激光導(dǎo)航系統(tǒng),實(shí)現(xiàn)±5毫米級定位精度,支持多機(jī)協(xié)同作業(yè),形成無死角巡檢網(wǎng)絡(luò)。
2025-11-06 09:44:02
雙擺雜技機(jī)器人DD2UD的多模態(tài)混合控制_但遠(yuǎn)宏
2017-02-07 18:37:16 0
0 云端機(jī)器人由云端大腦、神經(jīng)網(wǎng)絡(luò)VBN和及機(jī)器人本體等組成。其中,云端大腦提供機(jī)器人所需要的智能視覺、智能聽覺、智能運(yùn)動等多模態(tài)AI能力,通過遍布全球的移動通信安全高速網(wǎng)絡(luò),將能力傳輸給遠(yuǎn)端的機(jī)器人控制器和各種機(jī)器人、智能設(shè)備本體上。
2020-07-01 09:50:463618 電子發(fā)燒友網(wǎng)站提供《Arduino ESP32多合一機(jī)器人開源.zip》資料免費(fèi)下載
2022-10-21 10:50:112 基于開源多模態(tài)模型 OpenFlamingo,作者使用公開數(shù)據(jù)集創(chuàng)建了各種視覺指令數(shù)據(jù),包括視覺問答、圖像字幕、視覺推理、文本 OCR 和視覺對話。此外,還使用僅包含語言指令數(shù)據(jù)的語言模型組件進(jìn)行了訓(xùn)練。
2023-05-12 09:55:031724 
隨著 GPT-4 和 Stable Diffusion 等模型多模態(tài)能力的突飛猛進(jìn),多模態(tài)大模型已經(jīng)成為大模型邁向通用人工智能(AGI)目標(biāo)的下一個前沿焦點(diǎn)。總體而言,面向圖像和文本的多模態(tài)生成能力
2023-07-10 10:05:011255 
當(dāng)前學(xué)界和工業(yè)界都對多模態(tài)大模型研究熱情高漲。去年,谷歌的 Deepmind 發(fā)布了多模態(tài)視覺語言模型 Flamingo ,它使用單一視覺語言模型處理多項(xiàng)任務(wù),在多模態(tài)大模型領(lǐng)域保持較高
2023-07-16 20:45:021369 
據(jù)了解,資金中6.62億元將用于機(jī)器人視覺產(chǎn)業(yè)技術(shù)中臺建設(shè)項(xiàng)目,實(shí)施周期為4年,實(shí)施地點(diǎn)位于廣東省。研發(fā)方向包括機(jī)器人視覺傳感器、AI視覺感知和多模態(tài)交互大模型、機(jī)器人OS與云端數(shù)字孿生軟件平臺、量產(chǎn)測試與數(shù)字工廠。
2023-07-18 16:09:151135 
不同于單模態(tài)模型編輯,多模態(tài)模型編輯需要考慮更多的模態(tài)信息。文章出發(fā)點(diǎn)依然從單模態(tài)模型編輯入手,將單模態(tài)模型編輯拓展到多模態(tài)模型編輯,主要從以下三個方面:可靠性(Reliability),穩(wěn)定性(Locality)和泛化性(Generality)。
2023-11-09 14:53:221018 
2023年7月,谷歌DeepMind推出了機(jī)器人模型Robotics Transformer 2 (RT-2),這是一個視覺-語言-動作(VLA)模型,實(shí)現(xiàn)了視覺語言模型與機(jī)器人動作的結(jié)合。它能夠指導(dǎo)機(jī)器人識別視覺和語言,讓其理解指令并做出正確的操作。
2023-11-20 17:32:572169 
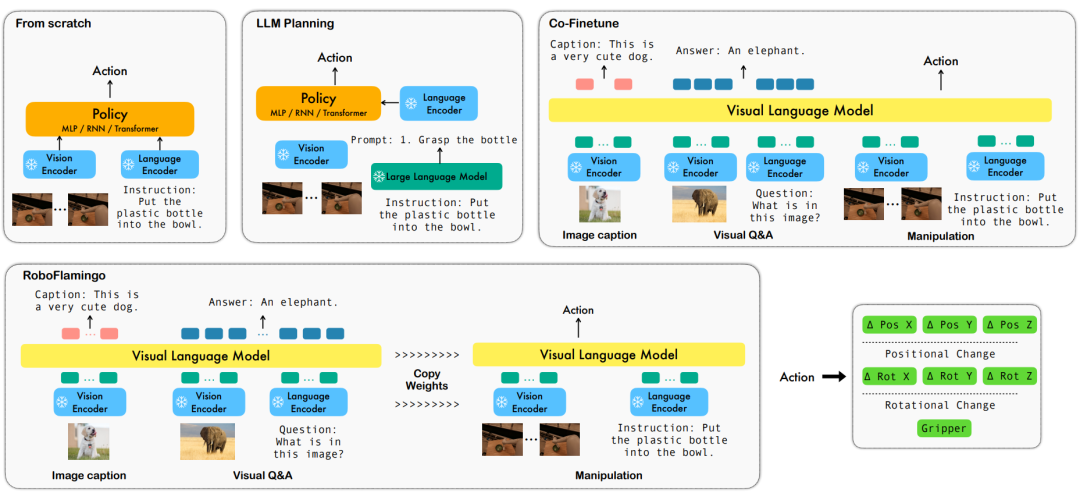
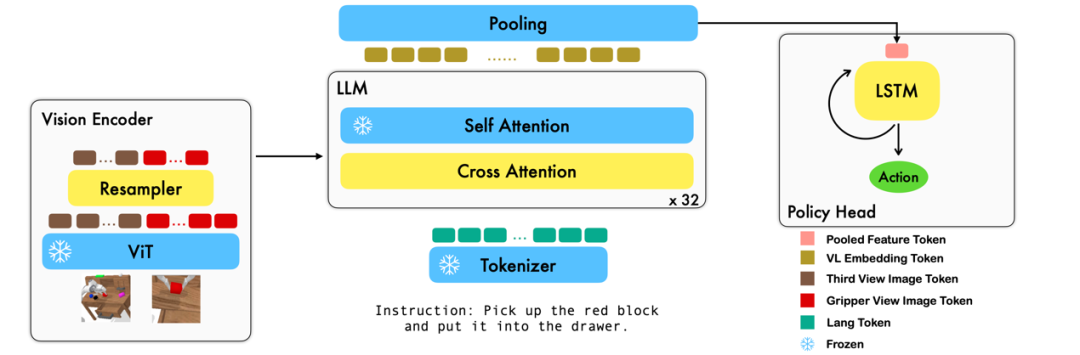
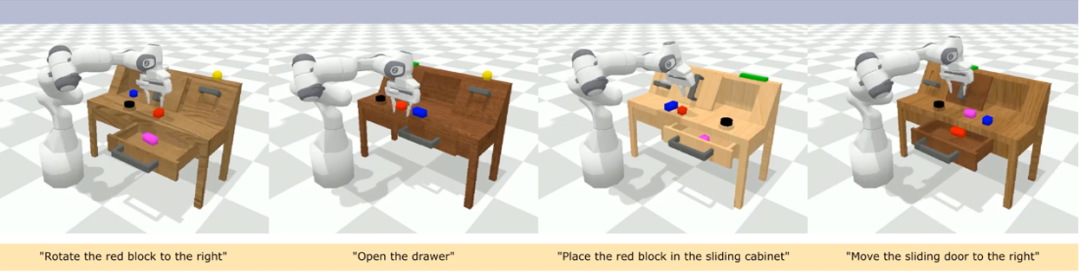
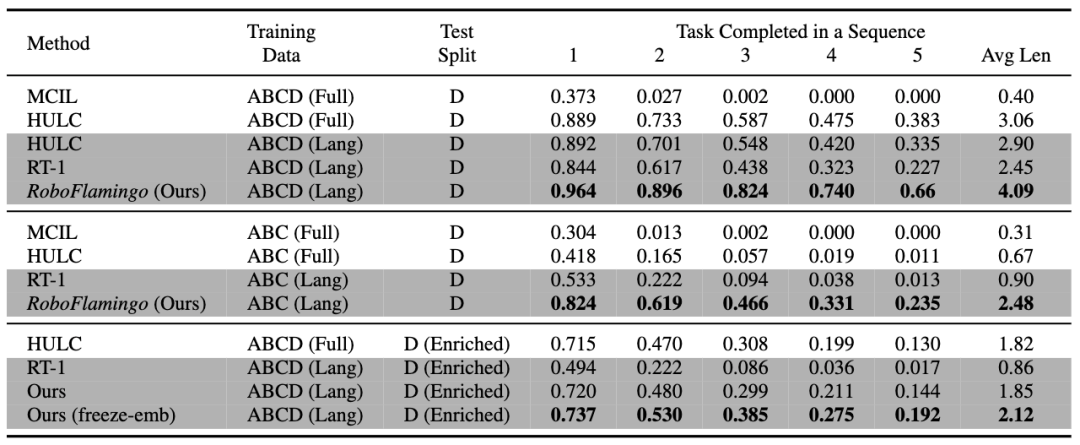
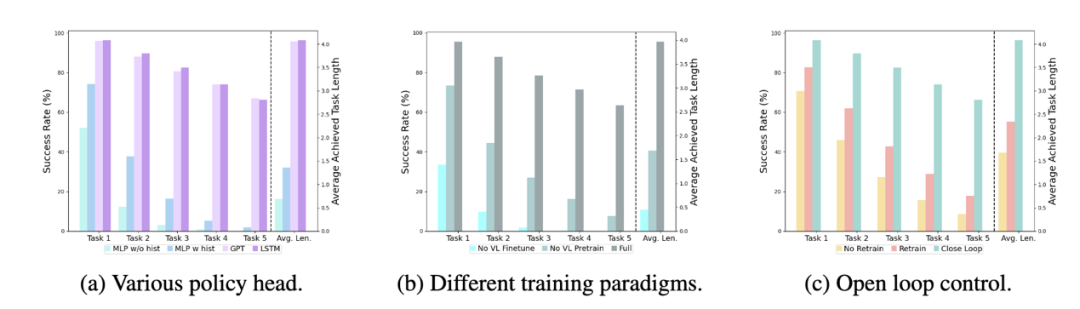
對此,ByteDance Research 基于開源的多模態(tài)語言視覺大模型 OpenFlamingo 開發(fā)了開源、易用的 RoboFlamingo 機(jī)器人操作模型,只用單機(jī)就可以訓(xùn)練。使用簡單、少量的微調(diào)就可以把 VLM 變成 Robotics VLM,從而適用于語言交互的機(jī)器人操作任務(wù)。
2024-01-23 16:02:171291 
這款機(jī)器人的獨(dú)特之處是使用OpenAI的大型語言模型進(jìn)行正常且完整的雙向?qū)υ挘捎谒軌蚪邮?b class="flag-6" style="color: red">多模態(tài)輸入,從而擁有更高層次的視覺和語言智能。Figure神經(jīng)網(wǎng)絡(luò)則能提供快速、精細(xì)、靈活的機(jī)器人動作表現(xiàn)。
2024-03-14 10:40:171271 配備 GR00T 模型的機(jī)器人由于需要“吸收消化”外界的多模態(tài)信息,還要快速完成理解、決策、行動等一系列動作,因此對于算力的需求是巨量的。
2024-04-12 10:39:46628 近日,智譜AI在人工智能領(lǐng)域取得重大突破,成功推出全新開源模型GLM-4-9B。這款模型以其卓越的多模態(tài)能力,再次刷新了業(yè)界對于大型語言模型的認(rèn)識。
2024-06-07 09:17:161488 /understanding-multimodal-llms ? 《一文理解多模態(tài)大語言模型 - 上》介紹了什么是多模態(tài)大語言模型,以及構(gòu)建多模態(tài) LLM 有兩種主要方式之一:統(tǒng)一嵌入解碼器架構(gòu)(Unified Embedding Decoder Architecture)。本
2024-12-03 15:18:041110 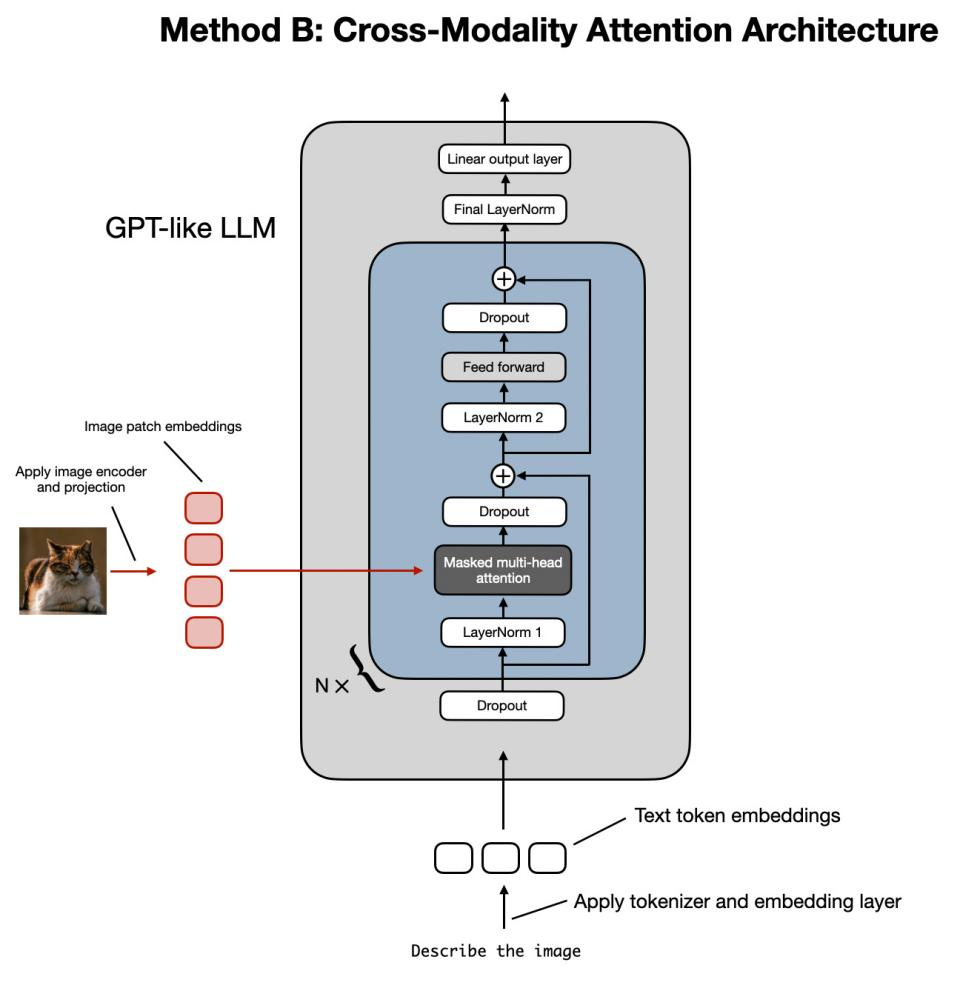
日前,加州大學(xué)的研究人員攜手英偉達(dá),共同推出了一款創(chuàng)新的視覺語言模型——NaVILA。該模型在機(jī)器人導(dǎo)航領(lǐng)域展現(xiàn)出了獨(dú)特的應(yīng)用潛力,為智能機(jī)器人的自主導(dǎo)航提供了一種全新的解決方案。 視覺語言模型
2024-12-13 10:51:221007 視覺語言模型(VLM)是一種多模態(tài)、生成式 AI 模型,能夠理解和處理視頻、圖像和文本。
2025-02-12 11:13:183479 
視覺語言模型(Visual Language Model, VLM)是一種結(jié)合視覺(圖像/視頻)和語言(文本)處理能力的多模態(tài)人工智能模型,能夠理解并生成與視覺內(nèi)容相關(guān)的自然語言。以下是關(guān)于VLM
2025-03-17 15:32:407973 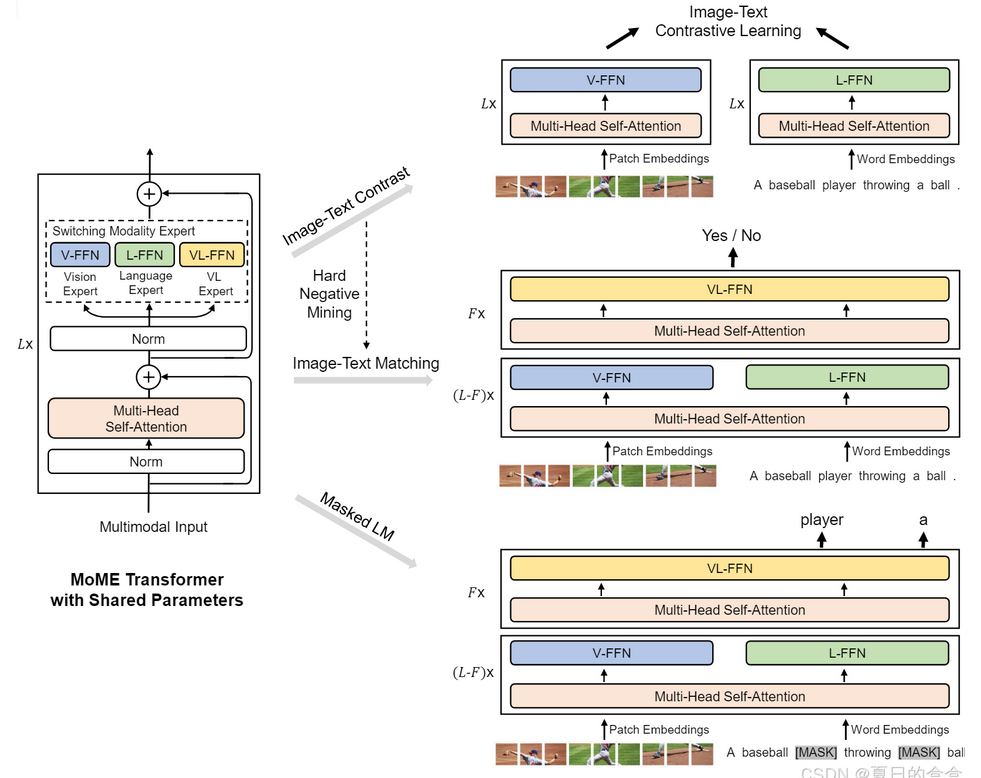
NVIDIA Isaac GR00T N1開源人形機(jī)器人基礎(chǔ)模型+開源物理引擎Newton加速機(jī)器人開發(fā)
2025-03-20 16:56:011374 開源:Github:https://github.com/Hello-XSJ/RDK\_vlm\_demo.git-本項(xiàng)目聚焦腿臂機(jī)器人在多模態(tài)環(huán)境感知、自然語言交互和自主行為控制方面的技術(shù)瓶頸
2025-07-01 20:27:471076 
商湯科技正式發(fā)布并開源了與南洋理工大學(xué)S-Lab合作研發(fā)的全新多模態(tài)模型架構(gòu) —— NEO,為日日新SenseNova 多模態(tài)模型奠定了新一代架構(gòu)的基石。
2025-12-08 11:19:10858 
 電子發(fā)燒友App
電子發(fā)燒友App









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論