 計算機視覺:三維點云數據處理學習內容總結
計算機視覺:三維點云數據處理學習內容總結

三維計算視覺研究內容包括:
1)三維匹配:兩幀或者多幀點云數據之間的匹配,因為激光掃描光束受物體遮擋的原因,不可能通過一次掃描完成對整個物體的三維點云的獲取。因此需要從不同的位置和角度對物體進行掃描。三維匹配的目的就是把相鄰掃描的點云數據拼接在一起。三維匹配重點關注匹配算法,常用的算法有最近點迭代算法 ICP和各種全局匹配算法。
2)多視圖三維重建:計算機視覺中多視圖一般利用圖像信息,考慮多視幾何的一些約束,射影幾何和多視圖幾何是視覺方法的基礎,在攝影測量中類似的存在共線方程。光束平差法是該類研究的核心技術。這里也將點云的多視匹配放在這里,比如人體的三維重建,點云的多視重建不再是簡單的逐幀的匹配,還需要考慮不同角度觀測產生誤差累積,因此存在一個針對三維模型進行優化或者平差的過程在里面。多視圖三維重建這里指的只是靜態建模,輸入是一系列的圖像或者點云集合。可以只使用圖像,或者只使用點云,也可以兩者結合(深度圖像)實現,重建的結果通常是Mesh網格。
SFM(運動恢復結構) vs Visual SLAM[摘抄] SFM 和 Visual SLAM
Multi-View Stereo (MVS)多視圖立體視覺,研究圖像一致性,實現稠密重建。
3)3D SLAM
按照傳感器類型分類:可以分為基于激光的SLAM和基于視覺的SLAM。
基于激光的SLAM可以通過點云匹配(最近點迭代算法 ICP、正態分布變換方法 NDT)+位姿圖優化(g2o、LUM、ELCH、Toro、SPA)來實現;實時激光3D SLAM算法 (LOAM,Blam,CartoGrapher等);Kalman濾波方法。通常激光3D SLAM側重于定位,在高精度定位的基礎上可以產生3D點云,或者Octree Map。
基于視覺(單目、雙目、魚眼相機、深度相機)的SLAM,根據側重點的不同,有的側重于定位,有的側重于表面三維重建。不過都強調系統的實時性。
(1)側重于定位的VSLAM系統比如orbSLAM,lsdSLAM;VINS是IMU與視覺融合的不錯的開源項目。
(2)側重于表面三維重建SLAM強調構建的表面最優,或者說表面模型最優,通常包含Fusion融合過程在里面。通常SLAM是通過觀測形成閉環進行整體平差實現,優先保證位姿的精確;而VSLAM通過Fusion過程同時實現了對構建的表面模型的整體優化,保證表面模型最優。最典型的例子是KinectFusion,Kinfu,BundleFusion,RatMap等等。
(4)目標檢測與識別:無人駕駛汽車中基于激光數據檢測場景中的行人、汽車、自行車、道路(車道線,道路標線,路邊線)以及道路設施(路燈)和道路附屬設施(行道樹等)。這部分工作也是高精度電子地圖的主要內容。當然高精度電子地圖需要考慮的內容更多。同時室內場景的目標識別的研究內容也很豐富,比如管線設施,消防設施等。
(5)形狀檢測與分類:點云技術在逆向工程中有很普遍的應用。構建大量的幾何模型之后,如何有效的管理,檢索是一個很困難的問題。需要對點云(Mesh)模型進行特征描述,分類。根據模型的特征信息進行模型的檢索。同時包括如何從場景中檢索某類特定的物體,這類方法關注的重點是模型。
(6)語義分類:獲取場景點云之后,如何有效的利用點云信息,如何理解點云場景的內容,進行點云的分類很有必要,需要為每個點云進行Labeling。可以分為基于點的分類方法和基于分割的分類方法。從方法上可以分為基于監督分類的技術或者非監督分類技術,深度學習也是一個很有希望應用的技術。最近深度學習進行點云場景理解的工作多起來了,比如PointNet,各種八叉樹的Net。
(7)雙目立體視覺與立體匹配ZNCC:立體視覺(也稱雙目視覺)主要研究的兩個相機的成像幾何問題,研究內容主要包括:立體標定(Stereo Calibration)、立體校正(Stereo Rectification)和立體匹配(Stereo Matching)。目前,立體標定主要研究的已經比較完善,而立體匹配是立體視覺最核心的研究問題。按照匹配點數目分類,立體匹配可分為稀疏立體匹配(sparse stereo matching)和密集立體匹配(dense stereo matching)。稀疏立體匹配由于匹配點數量稀少,一般很難達到高精度移動測量和環境感知的要求。因此,密集立體匹配是學術界和工業界的主要研究和應用方向。
(8)自動造型(構型),快速造型(構型)技術。對模型進行凸分割,模型剖分,以實現模型進一步的編輯修改,派生出其他的模型。
(9)攝像測量技術,視頻測量
1、點云濾波方法(數據預處理):
雙邊濾波、高斯濾波、條件濾波、直通濾波、隨機采樣一致性濾波。
VoxelGrid
2、關鍵點
ISS3D、Harris3D、NARF,
SIFT3D、均勻采樣,曲率方法采樣
3、特征和特征描述
法線和曲率計算NormalEstimation、特征值分析Eigen-Analysis、EGI
PFH、FPFH、3D Shape Context、Spin Image
4、點云匹配
ICP、穩健ICP、point to plane ICP、Point to line ICP、MBICP、GICP、NICP
NDT 3D、Multil-Layer NDT
FPCS、KFPCS、SAC-IA
Line Segment Matching、ICL
5、點云分割與語義分類
分割:區域生長、八叉樹區域生長、Ransac線面提取、NDT-RANSAC、全局優化平面提取
K-Means、Normalize Cut(Context based)
3D Hough Transform(線、面提取)、連通分析、
分類:基于點的分類,基于分割的分類;監督分類與非監督分類
目前基于深度學習的點云語義分類比較熱:PointNet,OctNet之類的吧,需要多加關注。
6、SLAM圖優化
Ceres(Google的最小二乘優化庫,很強大),g2o、LUM、ELCH、Toro、SPA
SLAM方法:ICP、MBICP、IDC、likehood Field、CrossCorrelation、NDT
7、目標識別、檢索
Hausdorff距離計算(人臉識別),Graph Matching
8、變化檢測
基于八叉樹的變化檢測
9. 三維重建
泊松重建、Delaunay triangulations
表面重建,人體重建,建筑物重建,樹木重建。
結構化重建:不是簡單的構建一個Mesh網格,而是為場景進行分割,為場景結構賦予語義信息。場景結構有層次之分,在幾何層次就是點線面等幾何圖元。
實時重建:重建植被或者農作物的4D(3D+時間)生長態勢;人體姿勢識別;表情識別;
10.點云數據管理
點云壓縮,點云索引(KD、Octree),點云LOD(金字塔),海量點云的渲染
責任編輯:xj
原文標題:三維點云數據處理學習內容總結
文章出處:【微信公眾號:新機器視覺】歡迎添加關注!文章轉載請注明出處。
-
三維
+關注
關注
1文章
529瀏覽量
29927 -
數據處理
+關注
關注
0文章
648瀏覽量
29985 -
計算機視覺
+關注
關注
9文章
1715瀏覽量
47623
原文標題:三維點云數據處理學習內容總結
文章出處:【微信號:vision263com,微信公眾號:新機器視覺】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
上海計算機視覺企業行學術沙龍走進西井科技
OFDR技術與三維重構的協同價值

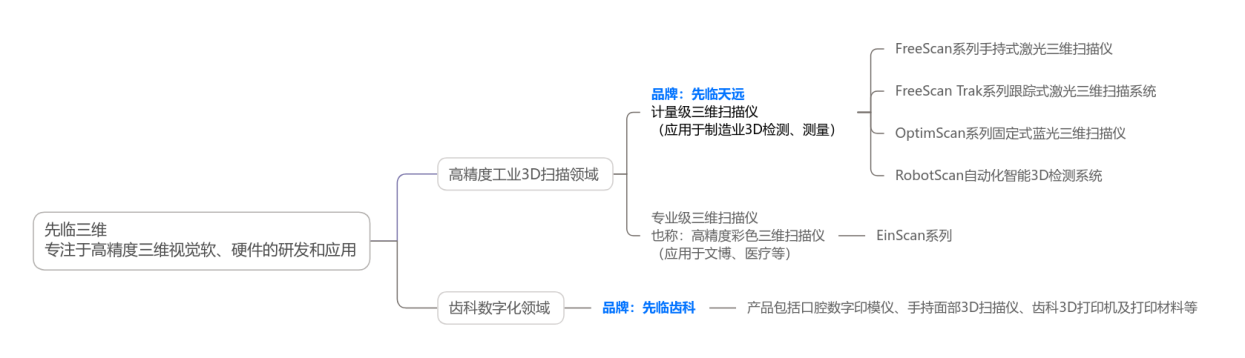
一文讀懂 | 三維視覺領域國家級制造業單項冠軍——先臨三維的品牌布局
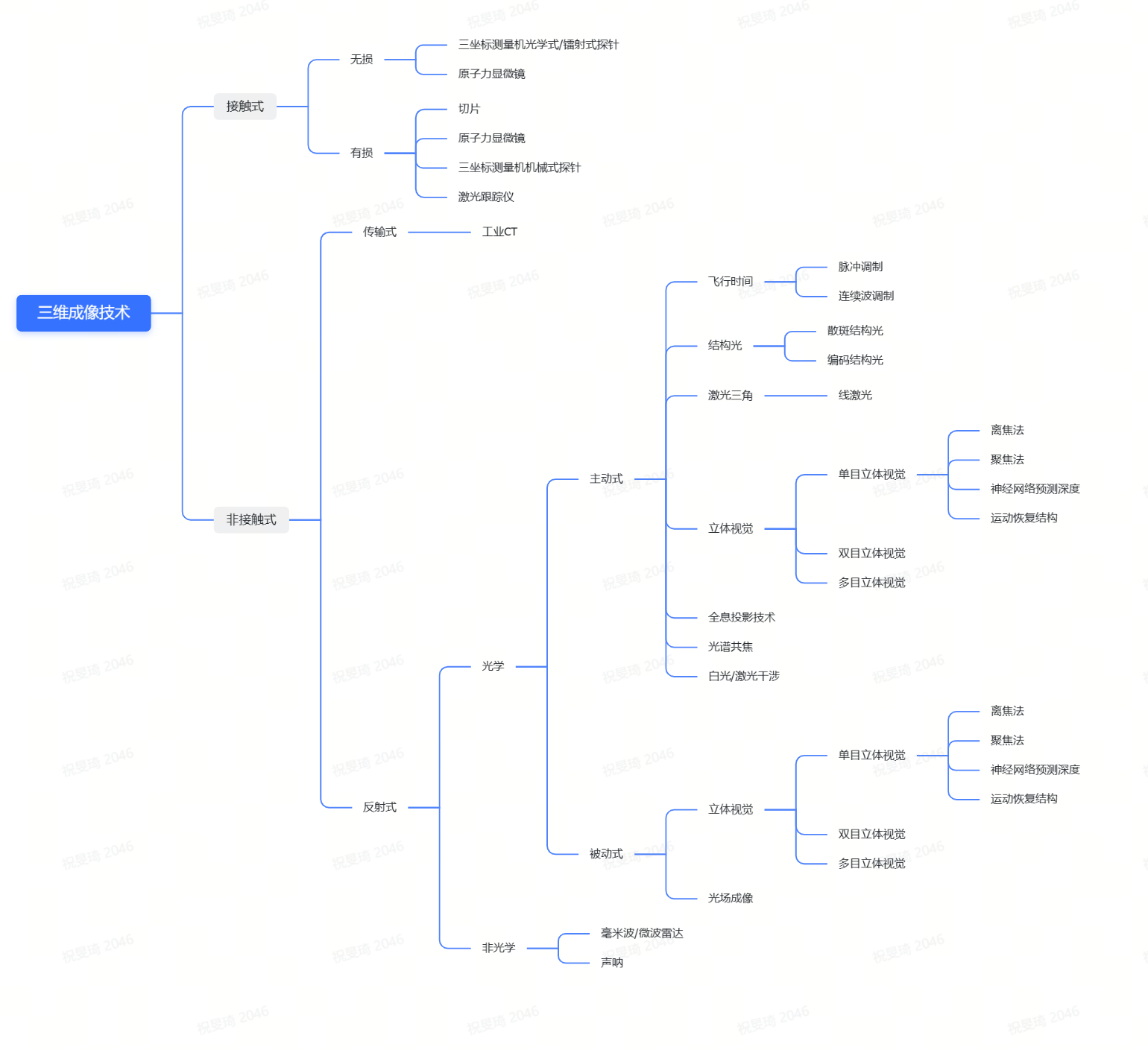
機器視覺三維成像技術簡介(一)
一種基于多次觀測融合的可交互三維高斯場景重建框架

【作品合集】賽昉科技VisionFive 2單板計算機開發板測評
導遠科技收獲三維視覺技術客戶批量訂單
加固計算機是用來干什么的?
AI 驅動三維逆向:點云降噪算法工具與機器學習建模能力的前沿應用

無人機航測三維建模遇難題?索尼FCB-EV9520L來破局!
易控智駕榮獲計算機視覺頂會CVPR 2025認可
航天宏圖全棧式3DGS實景三維重建系統解決方案

三維表面輪廓儀的維護保養是確保其長期穩定運行的關鍵




 工商網監
工商網監
評論