CAN FD(CAN with Flexible Data-Rate)協(xié)議繼承了CAN總線的主要特性,提高了CAN總線的網(wǎng)絡(luò)通信帶寬,改善了錯誤幀漏檢率,同時可以保持網(wǎng)絡(luò)系統(tǒng)大部分軟硬件特別是物理層不變。這種相似性使ECU供應(yīng)商不需要對ECU的軟件部分做大規(guī)模修改即可升級汽車通信網(wǎng)絡(luò)。
2017-02-22 17:44:57 30391
30391 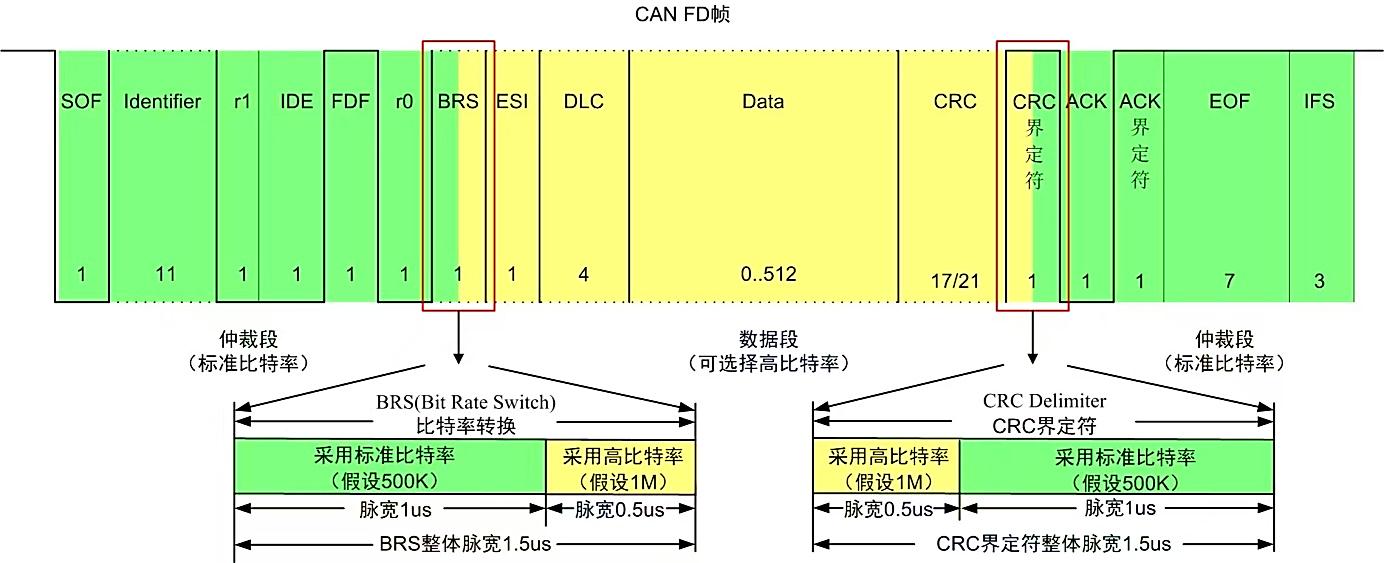
CAN 總線協(xié)議已經(jīng)成為汽車計算機(jī)控制系統(tǒng)和嵌入式工業(yè)控制局域網(wǎng)的標(biāo)準(zhǔn)總線,并且擁有以CAN 為底層協(xié)議專為大型貨車和重工機(jī)械車輛設(shè)計的 J1939 協(xié)議。近年來,它具有的高可靠性和良好的錯誤檢測能力受到重視,被廣泛應(yīng)用于汽車計算機(jī)控制系統(tǒng)和環(huán)境溫度惡劣、電磁輻射強(qiáng)及振動大的工業(yè)環(huán)境。
2022-08-02 12:29:542558 假期更新了一文搞懂CAN總線協(xié)議幀格式,CAN FD總線協(xié)議怎能錯過?本篇博文將講解CAN FD總線協(xié)議幀格式。
2022-10-14 12:49:534569 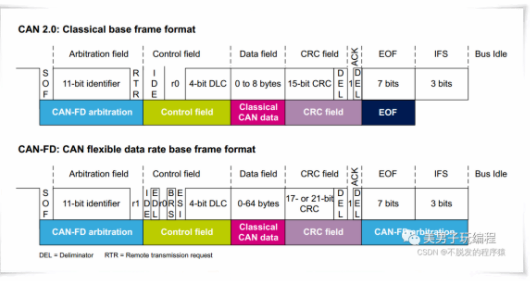
CAN的指定幀喚醒是一種網(wǎng)絡(luò)管理的場景,對于我這個偏硬件的工程師來說,網(wǎng)絡(luò)管理也就是通過CAN來喚醒不同的ECU,而指定幀喚醒就是特定的某些CAN ID的報文能夠喚醒ECU。
2023-03-07 09:17:029855 本文將介紹CAN總線通信協(xié)議的基礎(chǔ)知識,目前的內(nèi)容僅為通用的協(xié)議部分,暫不涉及具體的外設(shè)模塊的用法。研究通信協(xié)議的具體內(nèi)容,主要是看建立通信的物理環(huán)境(信號與總線拓?fù)浣Y(jié)構(gòu)),通信過程的對象(通信幀),以及交互過程(通信或握手過程)。
2023-06-16 10:58:168392 
MCU內(nèi)置了CAN控制器用來將MCU的數(shù)據(jù)封裝為CAN幀格式,同時它也負(fù)責(zé)CAN幀的校驗和錯誤幀的處理。控制器封裝好的邏輯報文經(jīng)TX RX送到CAN收發(fā)器,將邏輯信號轉(zhuǎn)變?yōu)檎嬲目偩€差分波形。
2023-09-08 09:19:322639 標(biāo)準(zhǔn)幀和擴(kuò)展幀是用于在控制器局域網(wǎng)(CAN)中傳輸數(shù)據(jù)的兩種基本格式。它們在幀結(jié)構(gòu)、標(biāo)識符長度、數(shù)據(jù)長度以及數(shù)據(jù)傳輸和應(yīng)用上存在一些區(qū)別。本文將詳細(xì)介紹標(biāo)準(zhǔn)幀和擴(kuò)展幀的區(qū)別。 一、幀結(jié)構(gòu): 標(biāo)準(zhǔn)幀
2023-12-08 10:08:3413446 通過對CANBUS協(xié)議的理解,我們知道:CAN總線上的節(jié)點接收或發(fā)送數(shù)據(jù)都是以幀為單位的。CAN協(xié)議規(guī)定了好幾種幀的類型,但是對于使用者而言,只有數(shù)據(jù)幀和遠(yuǎn)程幀可以通過軟件編程來控制。(其他幾種幀
2021-08-19 06:22:38
CAN協(xié)議是通過哪幾種類型的幀進(jìn)行的?CAN的發(fā)送與接收流程是怎樣的?
2021-11-11 06:23:33
一. CAN協(xié)議概念 1.1 CAN 協(xié)議簡介 CAN 是控制器局域網(wǎng)絡(luò) (Controller Area Network) 的簡稱,它是由研發(fā)和生產(chǎn)汽車電子產(chǎn)品著稱的德國 BOSCH 公司開發(fā)
2021-08-19 06:48:23
一. CAN協(xié)議概念1.1 CAN 協(xié)議簡介CAN 是控制器局域網(wǎng)絡(luò) (Controller Area Network) 的簡稱,它是由研發(fā)和生產(chǎn)汽車電子產(chǎn)品著稱的德國 BOSCH 公司開發(fā)的,并
2021-08-12 07:27:52
(1)電平特性(2)5種-幀類型STM32xxx CAN控制器(1)STM32F4 的 bxCAN 的主要特點有:(2)過濾器作用 詳細(xì)分析CAN協(xié)議 簡介CAN (Controller Area Network )是 ISO 國際標(biāo)準(zhǔn)化的串行半雙工異步(位時序同步)通信協(xié)議。(1)由于系統(tǒng)之間通信所用的
2021-08-19 06:02:14
CAN協(xié)議具有哪些特點?CAN協(xié)議的各種幀及其用途有哪些?
2021-11-10 06:58:36
CAN協(xié)議具有哪些特點?CAN協(xié)議有哪幾種幀類型呢?CAN協(xié)議的數(shù)據(jù)幀是如何構(gòu)成的?
2021-10-27 07:46:50
目錄1、什么是CAN2、CAN協(xié)議的特點3、ISO11898標(biāo)準(zhǔn)下的物理層特征4、CAN 協(xié)議的5 種類型幀4.1、總線仲裁介紹4.2、位時序5、STM32 CAN控制器簡介5.1、標(biāo)識符篩選器
2021-08-19 08:02:04
目錄CAN協(xié)議介紹物理層閉環(huán)總線網(wǎng)絡(luò)開環(huán)總線網(wǎng)絡(luò)通訊節(jié)點差分信號協(xié)議層簡介CAN的波特率位時序幀類型、作用及格式數(shù)據(jù)幀STM32CAN外設(shè)CAN 發(fā)送郵箱CAN 接收 FIFO有效消息接收處理
2022-02-21 07:34:32
通過對 CANBUS協(xié)議的理解,我們知道:CAN總線上的節(jié)點接收或發(fā)送數(shù)據(jù)都是以幀為單位的!!!CAN協(xié)議規(guī)定了好幾種幀類型,但是對于我們應(yīng)用來說,只有數(shù)據(jù)幀和遠(yuǎn)程幀可以通過軟件編程來控制。(其他
2021-08-19 08:50:49
CAN 簡介CAN 是 Controller Area Network 的縮寫(以下稱為 CAN),是 ISO 國際標(biāo)準(zhǔn)化的串行通信協(xié)議。在當(dāng)前的汽車產(chǎn)業(yè)中,出于對安全性、舒適性、方便性、低公害
2021-08-06 06:47:12
CAN總線協(xié)議1. CAN簡介CAN(controller area network)控制器局域網(wǎng)是用于解決汽車眾多控制部件之間的數(shù)據(jù)交換而開發(fā)的一種串行數(shù)據(jù)通信總線。其特點有:總線上節(jié)點不分主從
2022-03-01 06:29:30
發(fā)送一個和遠(yuǎn)程幀相符的數(shù)據(jù)幀(Data Frame)。遠(yuǎn)程幀和數(shù)據(jù)幀具有相同的標(biāo)識符。6.位流(Bit Stream)CAN 總線通信過程中的數(shù)據(jù)流。7.編碼方式CAN 總線通信協(xié)議規(guī)定,報文中的位流
2018-12-14 14:37:44
數(shù)據(jù)幀,并正確的分析出了結(jié)果。總結(jié),針對CAN總線協(xié)議的分析測試,發(fā)現(xiàn)了如下幾方面:1、OSC482L對于CAN總線數(shù)據(jù)獲取方式比較靈活,支持單線和雙線差分方式,這一點非常好,很靈活;2、通過單次觸發(fā)
2020-08-19 09:27:19
要求,不會占用過長總線時間,實時性強(qiáng)。(8),CAN每幀都有CRC校驗及其他驗錯措施。(9),接口中集成了CAN總線協(xié)議的物理層和數(shù)據(jù)鏈路層。(10),CAN的通信介質(zhì)可為雙絞線或同軸電纜,光纖。(11
2014-04-18 16:36:30
如題,假如CAN通信波特率為250K,使用擴(kuò)展幀,那么每秒可以發(fā)多少幀數(shù)據(jù)呢?我看周立功的CAN模塊,有的支持10000+幀/秒,有的5000幀/秒,最低的1200幀/秒,這個要怎么計算?
2016-08-29 14:25:08
CAN總線的標(biāo)準(zhǔn)幀和擴(kuò)展幀主要決定幀ID的長度,標(biāo)準(zhǔn)幀的幀ID長度是11位,也就是幀ID的范圍是000-7FF。擴(kuò)展幀的幀ID長度是29位,也就是幀ID的范圍是0000 0000-1FFF FFFF。CANopen幀ID最多是11位的,因此是標(biāo)準(zhǔn)幀;而SAE 1939協(xié)議通...
2021-08-20 06:43:04
協(xié)議中CAN報文種類報文傳輸過程中有:數(shù)據(jù)幀、遠(yuǎn)程幀、錯誤幀、過載幀和幀間隔。3. CAN報文的組成通常接收到的CAN報文由很多部分(圖1)組成,解析報文時用到的主要是幀ID和數(shù)據(jù)兩部分。3.1 幀ID的組成接收到的十六進(jìn)制的ID實際上是由 29 位標(biāo)識符轉(zhuǎn)換而來,目前大多數(shù)的通信協(xié)議中都直接給出
2021-09-14 09:23:24
] &0x40為真,表明恢復(fù)到錯誤激活狀態(tài)。CAN通信協(xié)議出錯 #define CAN_ERR_PROT 0x00000008U 當(dāng)錯誤幀結(jié)構(gòu)體中CAN
2017-01-03 15:57:38
can協(xié)議的硬件有非常強(qiáng)大的容錯率,解決各種沖突。沒有主從關(guān)系,單純的發(fā)送數(shù)據(jù)和匹配id再接收。數(shù)據(jù)是高位先發(fā)。數(shù)據(jù)以幀/包為單位,每幀數(shù)據(jù)里含有許多字節(jié)。數(shù)據(jù)分為兩種,標(biāo)準(zhǔn)和擴(kuò)展,主要區(qū)別是標(biāo)準(zhǔn)幀
2021-08-19 08:06:48
對應(yīng)邏輯0,CAN_H和CAN_L之差為2.5V左右。而隱性電平對應(yīng)邏輯1,CAN_H和CAN_L之差為0V數(shù)據(jù)幀和遙控幀有標(biāo)準(zhǔn)幀和擴(kuò)張幀兩種格式,一個11位,一個29位。二、CAN波特率設(shè)置位速率:由發(fā)...
2021-08-06 09:13:29
數(shù)據(jù)被正確的接收了”。幀結(jié)束:表示數(shù)據(jù)幀結(jié)束的段,為 7bit 隱性電平。附件pdf文檔內(nèi)容參考如下目錄,具體內(nèi)容請下載附件pdf文檔,附件壓縮包為CAN波特率配置工具(該工具僅支持WIN10系統(tǒng))1
2021-12-27 19:05:53
電場分析研究是一項極其復(fù)雜的動態(tài)絕緣問題,其基礎(chǔ)是真空滅弧室內(nèi)部靜電場問題的研究。這里僅從真空滅弧室的靜態(tài)電場來著手分析,在小型化真空滅弧室設(shè)計與改進(jìn)過程中,借助Ansoft Maxwell軟件的靜電場
2019-06-27 07:09:04
根據(jù)IMXRT的processor reference可知,F(xiàn)LEXCANFD模塊同時支持CAN2.0B和CAN FD協(xié)議。這意味著FLEXCANFD初始化為CANFD模式后,可以根據(jù)需要允許發(fā)送
2023-03-20 08:11:52
STM32 CAN總線通信學(xué)習(xí)筆記(一)一、CAN總線簡介CAN 是控制器局域網(wǎng)絡(luò)(Controller Area Network, CAN)的簡稱。CAN采用數(shù)據(jù)塊編碼的方式,數(shù)據(jù)塊根據(jù)幀的類型
2021-08-19 06:04:04
STM32-CAN通訊實驗1、CAN簡介CAN協(xié)議特點:1、 多主控制2、系統(tǒng)柔軟性3、通信速度快、通訊距離遠(yuǎn)4、具有錯誤檢測、錯誤通知和錯誤恢復(fù)功能5、故障封閉功能6、連接節(jié)點多CAN協(xié)議的五種幀
2021-08-05 06:33:19
。CAN(Controlled Area Network)協(xié)議是不同設(shè)備之間的一種通信方式,但有一定的規(guī)則。當(dāng)消息通過 CAN 總線傳輸時,必須遵循這些規(guī)則。在這里,我們將看到這些規(guī)則。下面顯示的是標(biāo)準(zhǔn) CAN 幀這里,Identifier是發(fā)送設(shè)備的IDRTR(遠(yuǎn)程傳輸請求)指定數(shù)據(jù)是遠(yuǎn)程幀...
2021-08-03 06:04:01
(參考原子哥stm32開發(fā)手冊)1、 CAN 簡介CAN 是 Controller Area Network 的縮寫(以下稱為 CAN),是 ISO 國際標(biāo)準(zhǔn)化的串行通信協(xié)議。在當(dāng)前的汽車產(chǎn)業(yè)中
2021-08-19 07:37:51
STM32 的 CAN 外設(shè)簡介STM32 的芯片中具有 bxCAN 控制器 (Basic Extended CAN),它支持 CAN 協(xié)議 2.0A 和2.0B 標(biāo)準(zhǔn)。該 CAN 控制器支持最高
2021-08-19 07:18:34
目錄:一、CAN通信原理1.CAN通信簡介2.CAN通信優(yōu)點3.CAN總線物理層4.CAN報文種類5.數(shù)據(jù)幀格式6.仲裁過程7.位同步二、STM32的CAN控制器1.功能特點2.STM32CAN架構(gòu)
2021-08-19 06:34:16
文章目錄(一)IIC協(xié)議簡介(二)物理層和協(xié)議層簡介(三)IIC物理層:3.1、物理層的特點(四)IIC協(xié)議層:4.1、IIC基本的讀寫過程4.2、通信的起始和停止信號4.3、數(shù)據(jù)的有效性4.4
2022-01-05 06:13:15
TDD協(xié)議的工作過程在TDD協(xié)議工作過程中,接收機(jī)要經(jīng)過幾個階段。當(dāng)正確接收捕獲突發(fā)幀中的4個特字UW后,接收機(jī)的LOCK輸出信號有效;當(dāng)正確接收空閑突發(fā)幀后,接收機(jī)的RLOCK輸出信號有效。隨后
2011-07-15 14:42:59
kirito 2020-11-29 V1.00簡介開發(fā)板: stm32f407vgt6IDE: keil + cubemx6.0功能: 實現(xiàn)stm32HAL 串口IAP, 協(xié)議采用非阻塞式
2022-03-02 06:01:08
過濾中起作用嗎?
4.能否按程序說明在接收 CAN FD RX 幀時,接受過濾過程是如何運行的?
5.請詳細(xì)描述從接收 CAN FD RX 幀期間的接受過濾到將接受的數(shù)據(jù)寫入報文 RAM 的逐步過程。
2024-05-22 06:38:09
在同一個can網(wǎng)絡(luò)里,有4個設(shè)備,分別用A,B,C,D來表示。其中A是MCU的CAN,收發(fā)標(biāo)準(zhǔn)幀和擴(kuò)展幀;B是收發(fā)標(biāo)準(zhǔn)幀;C、D是收發(fā)擴(kuò)展幀。CAN網(wǎng)絡(luò)的波特率是250kbps,終端電阻是120歐
2017-02-16 13:47:29
STM32f103開發(fā)板通過OBD2與汽車診斷系統(tǒng)通信,采用的協(xié)議是ISO15765-4,然后分為4種情況,波特率250K(數(shù)據(jù)幀為標(biāo)準(zhǔn)或者擴(kuò)展幀)、500K(數(shù)據(jù)幀為標(biāo)準(zhǔn)或者擴(kuò)展幀).初步做法:當(dāng)
2018-12-13 15:55:42
求助can的協(xié)議的定義,物理層 數(shù)據(jù)網(wǎng)路連接,還有網(wǎng)絡(luò)層 還有數(shù)據(jù)幀的格式,以及有什么命令,同步的 詳細(xì)解釋! 大神求助呀
2014-07-30 17:53:58
(1)求解的推導(dǎo)過程:最小二乘擬合直線的推導(dǎo)過程如下:假設(shè)直線方程為:設(shè)有n對觀測值(xi,yi),則列出如下方程:整理得:其中A、EA、L的表達(dá)式如下:最后解算直線擬合求解的推導(dǎo)過程如下:其中(2
2021-08-18 08:04:22
利用STM32F103的CAN控制器可以和其他的節(jié)點進(jìn)行通訊了。不過我承認(rèn),我自己對于CAN協(xié)議的理解還是太膚淺了。現(xiàn)在的問題是,我的節(jié)點怎么知道CAN總線的波特率?怎么知道數(shù)據(jù)幀時標(biāo)準(zhǔn)格式,還是
2018-12-28 08:54:05
CANopen協(xié)議講座(1)之CAN總線簡介
CANopen協(xié)議以其成熟的結(jié)構(gòu)、抗干擾能力強(qiáng)等優(yōu)勢越來越多的應(yīng)用到各種工業(yè)活動中,也成為各種行業(yè)的標(biāo)準(zhǔn),已經(jīng)成為未來現(xiàn)場
2010-03-26 17:27:40 81
81 詳細(xì)分析了電源的幀格式及命令字通訊協(xié)議。
2010-07-05 15:08:3112 無線通訊演進(jìn)過程概述
無線通訊從 2G、3G 到3.9G 發(fā)展過程,是從移動的語音業(yè)務(wù)到高速業(yè)務(wù)發(fā)展的5 過程。目前可提供應(yīng)用
2009-06-16 12:02:372986 WCDMA 技術(shù)演進(jìn)過程WCDMA 的技術(shù)發(fā)展路標(biāo)如下圖所示:
圖3 WCDMA技術(shù)發(fā)展路標(biāo)
2009-06-16 13:03:351409 1.CAN協(xié)議 1.1 幀類型 通訊時使用下面5個類型的幀: 數(shù)據(jù)幀 遙控幀 錯誤幀 過載幀 幀間空隙 在所有這些幀中,數(shù)據(jù)幀和遙控幀由用戶設(shè)置,而其它幀則由CAN硬件設(shè)置。 數(shù)據(jù)和遙控幀有兩種格式
2018-01-04 04:34:218685 
的幀長,再使電子標(biāo)簽對幀中的時隙響應(yīng)概率達(dá)到最大,使系統(tǒng)碰撞概率最小。仿真結(jié)果表明,采用改進(jìn)型幀時隙防碰撞算法的系統(tǒng)吞吐率可以保持在50%以上,并且在有大量電子標(biāo)簽的工作范圍內(nèi)吞吐率可以達(dá)到65%以上。與采用幀時隙防碰撞
2018-01-21 11:52:191 一種改進(jìn)的MIMOOFDM幀同步算法.pdf
2018-04-19 11:15:400 CAN:Controller Area Network,控制器局域網(wǎng)是一種能有效支持分布式控制和實時控制的串行通訊網(wǎng)絡(luò)。本文首先介紹了CAN總線系統(tǒng)結(jié)構(gòu)及數(shù)據(jù)傳輸,其次詳細(xì)的闡述了CAN總線過載幀及數(shù)據(jù)幀,具體的跟隨小編一起來了解一下吧。
2018-05-07 10:59:0123340 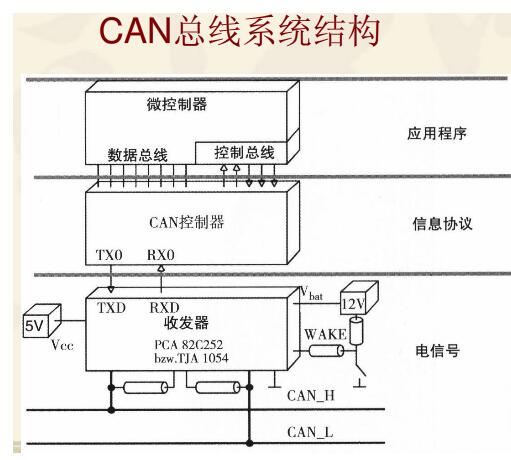
本文主要介紹了CAN總線遠(yuǎn)程幀和錯誤幀,首先我們先來了解了解一下通訊時使用的幀類型有哪些,他們的作用又是什么,具體的跟隨小編一起來了解一下吧。
2018-05-07 11:30:2127754 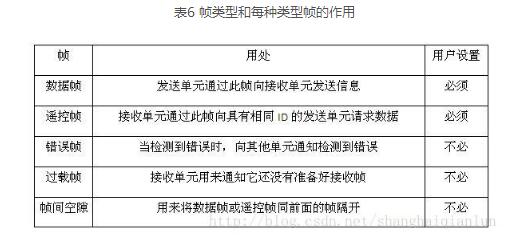
本文說的CAN即是一種總線,也是一種協(xié)議。因此,我們常聽見CAN總線,也常聽見CAN協(xié)議。CAN協(xié)議和CANOpen協(xié)議是兩套不同的協(xié)議。從軟硬件層次來劃分,CAN協(xié)議屬于硬件協(xié)議,而CANOpen
2018-10-03 19:53:0076048 
MCU沒有CAN或CAN接口數(shù)量不夠怎么辦?目前市面上有串口轉(zhuǎn)CAN的相關(guān)模塊或設(shè)備,但大家知道串口轉(zhuǎn)CAN是如何實現(xiàn)的嗎?轉(zhuǎn)換后的幀格式是如何的?本文將為大家詳細(xì)介紹串口經(jīng)過轉(zhuǎn)換后的CAN幀格式與注意事項。
2019-02-02 16:30:0016066 CAN總線產(chǎn)生的錯誤以錯誤幀的形式上報給應(yīng)用層。設(shè)置注冊表[HKEY_LOCAL_MACHINE\Drivers\BuiltIn\CAN1] BusErrorReport項為1可以讓驅(qū)動上報CAN
2020-02-05 10:27:242688 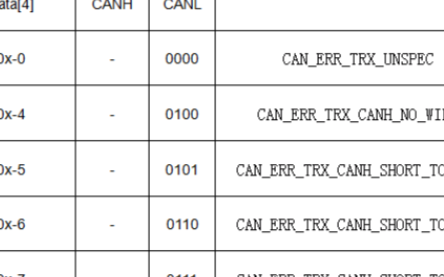
物聯(lián)網(wǎng)監(jiān)控工程系統(tǒng)正在為改進(jìn)過程開辟新的領(lǐng)域。一些工業(yè),如化學(xué)生產(chǎn),正在安裝大量的物聯(lián)網(wǎng)傳感器,以使監(jiān)測的粒度大得多。這些傳感器向計算機(jī)提供數(shù)據(jù),計算機(jī)依次對數(shù)據(jù)進(jìn)行分析,然后將信號發(fā)送給調(diào)節(jié)過程
2020-04-14 16:16:46624 CANOpen系列教程04_CAN總線波特率、位時序、幀類型及格式說明
2020-03-06 16:18:589393 CCD視覺檢測外觀缺陷,漏檢率和誤檢率該怎么評估 機(jī)器視覺篩選機(jī)做缺陷檢測的用戶都希望篩選機(jī)設(shè)備的誤檢率和漏檢率越低越好,最好能做到100%,希望是美好的,現(xiàn)實是殘酷的,為什么這樣說呢,因為誤檢率
2021-07-07 17:34:527782 目錄:一、CAN通信原理1.CAN通信簡介2.CAN通信優(yōu)點3.CAN總線物理層4.CAN報文種類5.數(shù)據(jù)幀格式6.仲裁過程7.位同步二、STM32的CAN控制器1.功能特點2.STM32CAN架構(gòu)
2021-11-19 12:21:0886 目錄CAN協(xié)議介紹物理層閉環(huán)總線網(wǎng)絡(luò)開環(huán)總線網(wǎng)絡(luò)通訊節(jié)點差分信號協(xié)議層簡介CAN的波特率位時序幀類型、作用及格式數(shù)據(jù)幀STM32CAN外設(shè)CAN 發(fā)送郵箱CAN 接收 FIFO有效消息接收處理
2021-12-24 19:04:1523 首先咱們說說什么是CAN2.0b,它是CANBUS的一種協(xié)議類型,用人話說就是定義規(guī)則。它和can2.0A是目前應(yīng)用的最為普遍的協(xié)議,被稱作為是傳統(tǒng)CAN。其中CAN2.0A協(xié)議僅支持標(biāo)幀格式,而
2022-07-04 09:40:029385 CAN協(xié)議可以接收和發(fā)送11位標(biāo)準(zhǔn)數(shù)據(jù)幀和29位擴(kuò)展數(shù)據(jù)幀,CAN標(biāo)準(zhǔn)數(shù)據(jù)幀和擴(kuò)展數(shù)據(jù)幀只是幀ID長度不同,以便可以擴(kuò)展更多CAN節(jié)點。
2022-09-28 09:50:5914839 作者|蒹葭小編|吃不飽CAN幀有多種格式,錯誤幀作為CAN幀中獨特的一種,了解其作用,類型與產(chǎn)生原因,對于進(jìn)行測試以及開發(fā)有很大的幫助,本文將對錯誤幀的相關(guān)基礎(chǔ)知識以及后續(xù)的分析排查進(jìn)行介紹。01
2023-02-23 15:11:524955 
CAN FD幀結(jié)構(gòu) CAN FD節(jié)點可以正常收、發(fā)CAN報文,但CAN節(jié)點不能正確收、發(fā)CAN FD報文,因為其幀格式不一致。 與CAN一樣,CAN FD一共具有:幀起始,仲裁段,控制段,數(shù)據(jù)段
2023-07-18 10:42:2510082 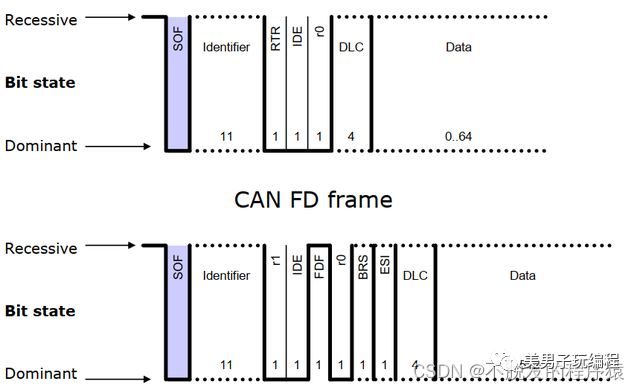
一幀CAN FD報文位數(shù) 根據(jù)CAN FD幀結(jié)構(gòu)組成,可以算出一幀CAN FD報文位數(shù): CAN FD報文位數(shù) = 幀起始(1位)+ 仲裁段(13/32位)+ 控制段(8位)+ 數(shù)據(jù)段(0~512位
2023-07-18 10:48:189892 通過 CAN 總線傳輸數(shù)據(jù)是需要按照一定協(xié)議進(jìn)行的,CAN 協(xié)議提供了 5種幀格式來傳輸數(shù)據(jù):數(shù)據(jù)幀、遙控幀、錯誤幀、過載幀和幀間隔。其中數(shù)據(jù)幀和遙控幀有標(biāo)準(zhǔn)格式和擴(kuò)展格式兩種,標(biāo)準(zhǔn)格式有 11
2023-07-25 10:36:1913051 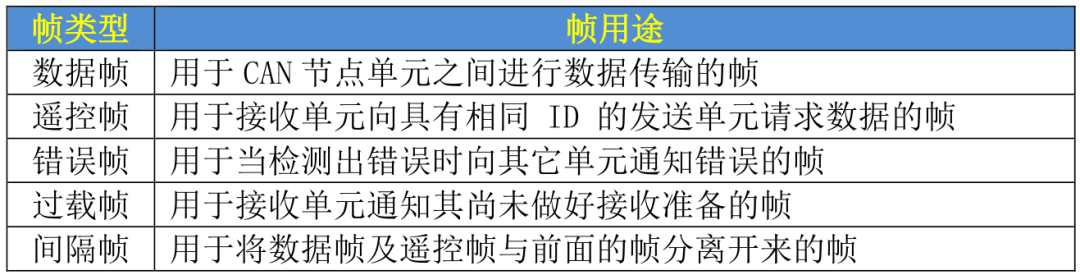
遙控幀 接收單元向發(fā)送單元請求數(shù)據(jù)的時候就用遙控幀,遙控幀由 6 個段組成: ①、幀起始,表示數(shù)據(jù)幀開始的段。②、仲裁段,表示該幀優(yōu)先級的段。③、控制段,表示數(shù)據(jù)的字節(jié)數(shù)及保留位的段。④、CRC段
2023-07-25 10:38:583284 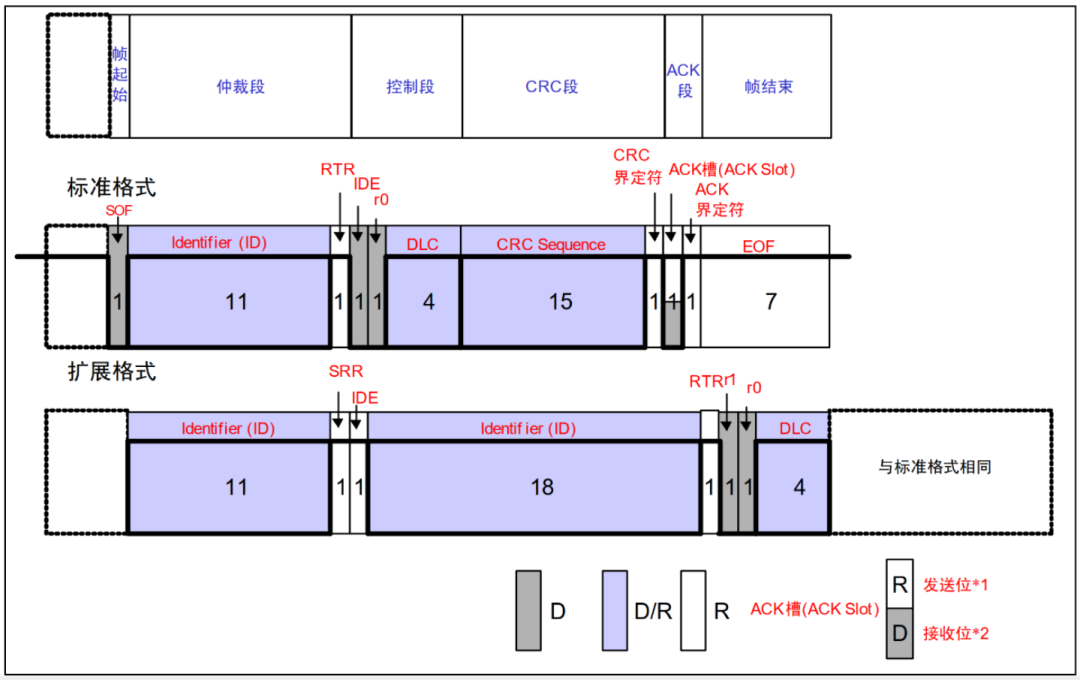
Flexible Data-rate)是一種常用于汽車和工業(yè)領(lǐng)域的通信協(xié)議。 CAN協(xié)議最初是由德國的博世公司(Bosch)在20世紀(jì)80年代開發(fā)的,旨在解決汽車電子設(shè)備之間的通信需求。它是一種高效可靠
2023-07-31 12:10:045101 
前篇內(nèi)容請點擊查看: RA MCU CAN和CANFD IP介紹 CAN和CANFD協(xié)議簡介(上) 2. CAN協(xié)議 2.2 協(xié)議層 前文 講述了CAN的物理層標(biāo)準(zhǔn),約定了電氣特性,以下介紹的協(xié)議層
2023-08-02 12:15:034502 
SaaS在企業(yè)服務(wù)領(lǐng)域成為一種主流形式,也只是近些年的事情。實際上,這個演進(jìn)過程相當(dāng)長,主要經(jīng)歷了4個階段。
2023-08-29 10:20:191715 
CAN(Controller Area Network)是一種廣泛應(yīng)用于汽車、工業(yè)控制和通信領(lǐng)域的串行通信總線標(biāo)準(zhǔn)。CAN數(shù)據(jù)幀是CAN總線上傳輸數(shù)據(jù)的基本單位,它包含了一系列的字段,用于確定
2023-12-01 16:41:506347 如何用示波器排查CAN的各種錯誤幀呢? 導(dǎo)言: 控制器局域網(wǎng)絡(luò)(Controller Area Network,CAN)是一種常用的現(xiàn)場總線通信協(xié)議,廣泛應(yīng)用于汽車電子系統(tǒng)、工業(yè)自動化等領(lǐng)域。然而
2023-12-07 11:09:012165 CAN總線調(diào)試時,根據(jù)數(shù)據(jù)的重要性,接收端可以專注于接收重要消息,提高效率。CAN報文幀是用一個標(biāo)識符或一系列標(biāo)識符來過濾的。可以使用CAN總線軟件和芯片硬件過濾規(guī)則實現(xiàn)過濾功能。軟件過濾
2023-12-08 15:52:371392 
最新公司需要利用J1939的CAN協(xié)議進(jìn)行數(shù)據(jù)通信,琢磨了一天,才明白,現(xiàn)在整理成筆記,內(nèi)容如下:1.數(shù)據(jù)幀格式數(shù)據(jù)幀格式應(yīng)遵循CAN29位標(biāo)識符的擴(kuò)展幀格式,CAN數(shù)據(jù)幀由很多域組成(仲裁域+控制
2024-01-10 08:00:521736 
CAN通信協(xié)議中有四種幀類型,分別是數(shù)據(jù)幀、遠(yuǎn)程幀、錯誤幀和過載幀。
2024-01-30 09:18:057810 CAN總線的標(biāo)準(zhǔn)幀和擴(kuò)展幀是CAN協(xié)議中的兩種幀類型。
2024-01-30 09:41:129795 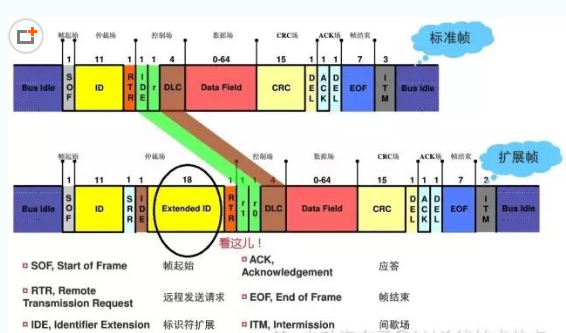
can總線的數(shù)據(jù)幀中數(shù)據(jù)長度碼和數(shù)據(jù)字節(jié)數(shù)的關(guān)系? CAN總線是一種常用于數(shù)據(jù)通信的協(xié)議,它使用數(shù)據(jù)幀來傳輸信息。在CAN數(shù)據(jù)幀中,數(shù)據(jù)長度碼(DLC)和數(shù)據(jù)字節(jié)數(shù)是緊密相關(guān)的。 首先,我們來了
2024-01-31 11:31:524199 請問用CAN存儲器存儲的CAN總線數(shù)據(jù)幀格式有哪些呢? CAN總線是一種常用于汽車、工業(yè)控制和其他應(yīng)用領(lǐng)域的串行通信協(xié)議。在CAN總線中,數(shù)據(jù)通過數(shù)據(jù)幀的形式進(jìn)行傳輸。數(shù)據(jù)幀包含了發(fā)送節(jié)點和接收節(jié)點
2024-01-31 13:46:382377 CAN和CANFD協(xié)議簡介(上)
2024-01-26 08:06:063259 
CAN和CANFD協(xié)議簡介(下)
2024-02-19 12:08:352609 CAN(Controller Area Network)是一種用于汽車和工業(yè)控制系統(tǒng)的通信協(xié)議。它具有高可靠性、實時性和靈活性等特點,被廣泛應(yīng)用于汽車、工業(yè)、醫(yī)療等領(lǐng)域。CAN數(shù)據(jù)幀是CAN通信
2024-07-24 15:03:032118 CAN(Controller Area Network)是一種用于汽車電子系統(tǒng)中的通信協(xié)議,它具有高可靠性、實時性和靈活性等特點。在CAN通信中,數(shù)據(jù)幀是最基本的通信單元,用于傳輸信息。 概述
2024-07-24 15:10:273603 CAN(控制器局域網(wǎng)絡(luò))是一種基于消息傳遞的通信協(xié)議,廣泛應(yīng)用于汽車、工業(yè)自動化和嵌入式系統(tǒng)等領(lǐng)域。CAN協(xié)議的數(shù)據(jù)幀是用于傳輸信息的基本單位。 1. CAN數(shù)據(jù)幀概述 CAN數(shù)據(jù)幀是一種用于在
2024-07-24 15:14:262521 一、引言 CAN協(xié)議簡介 :CAN(Controller Area Network)是一種用于汽車電子和工業(yè)自動化等領(lǐng)域的串行通信協(xié)議,由德國博世公司開發(fā)。CAN協(xié)議以其高可靠性、高速率、多主通信等
2024-07-24 15:18:181236 CAN(Controller Area Network)是一種用于汽車和工業(yè)領(lǐng)域的通信協(xié)議,它允許多個設(shè)備在同一總線上進(jìn)行通信。CAN協(xié)議有兩種幀類型:標(biāo)準(zhǔn)幀和擴(kuò)展幀。這兩種幀類型在結(jié)構(gòu)和應(yīng)用場
2024-07-24 15:20:184554 。 1. CAN協(xié)議簡介 在深入了解CAN FD之前,讓我們先回顧一下CAN協(xié)議的基本原理。CAN是一種基于消息的通信協(xié)議,它允許多個設(shè)備在沒有中央控制單元的情況下相互通信。CAN協(xié)議的核心是其數(shù)據(jù)幀結(jié)構(gòu),它包括標(biāo)識符(ID)和數(shù)據(jù)字段。 1.1 CAN標(biāo)準(zhǔn)幀結(jié)構(gòu) 標(biāo)準(zhǔn)的CAN幀由
2024-07-24 15:22:314529 CAN(Controller Area Network)是一種用于汽車和工業(yè)自動化領(lǐng)域的現(xiàn)場總線通信協(xié)議。CAN協(xié)議具有多種幀格式,包括標(biāo)準(zhǔn)幀和擴(kuò)展幀。在實際應(yīng)用中,標(biāo)準(zhǔn)幀和擴(kuò)展幀是可以共存的,但
2024-07-24 15:24:063678 CAN總線由Bosch公司在1980年代開發(fā),旨在為汽車電子系統(tǒng)提供一個可靠的通信網(wǎng)絡(luò)。隨著技術(shù)的發(fā)展,CAN總線已經(jīng)被廣泛應(yīng)用于各種工業(yè)和自動化領(lǐng)域。 2. CAN總線數(shù)據(jù)幀概述 CAN總線的數(shù)據(jù)
2024-11-12 10:12:174402 廣播發(fā)送的短幀結(jié)構(gòu),還體現(xiàn)在其錯誤檢測機(jī)制上。通過總線數(shù)據(jù)以及總線波形來分析總線故障時,CAN協(xié)議錯誤檢測機(jī)制中豐富的錯誤幀類型能讓定位問題的效率更高。錯誤幀是CA
2025-01-15 10:03:491076
 電子發(fā)燒友App
電子發(fā)燒友App









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論