直流電機作為工業(yè)生產(chǎn)和日常生活中常見的動力裝置,其接線方式的正確性直接影響電機性能、使用壽命甚至安全。本文將從直流電機的基本結(jié)構(gòu)、接線原理、常見接線方法、注意事項及故障排查五個方面展開詳細解析,并
2025-12-31 07:43:53 72
72 
交流電機與直流電機作為現(xiàn)代工業(yè)中應(yīng)用最廣泛的兩種電動機類型,其調(diào)速技術(shù)直接關(guān)系到生產(chǎn)效率、能源消耗和設(shè)備性能。隨著電力電子技術(shù)、微處理器控制技術(shù)的快速發(fā)展,電機調(diào)速方法已從傳統(tǒng)的機械式調(diào)節(jié)發(fā)展為
2025-12-19 07:39:18328 
探索用于Arduino的TLE94112ES直流電機控制盾牌 引言 在電子工程領(lǐng)域,電機控制一直是至關(guān)重要的部分。對于Arduino開發(fā)者而言,一款功能強大且易于使用的電機控制盾牌可以極大地提升項目
2025-12-18 16:35:13166 線圈中 的交變的電流。
電磁力F的方向由兩個因素決定;1,導(dǎo)體中的電流方向,2,氣隙磁場的極性。改變其中之一就可以改變電磁力F的方向。
同一臺直流電機即可作發(fā)電機運行,也可作電
動機運行,關(guān)鍵在輸入
2025-10-28 05:25:39
) 冷卻系統(tǒng):為電機系統(tǒng)提供冷卻; 4) 測功機:提供被試電機所需轉(zhuǎn)矩及轉(zhuǎn)速。 二、測試難點 高壓,大功率,倒灌 大功率直流電機實測時干擾大,工況多,存在短時間發(fā)電倒灌情況(剎車,急停等工況)。 ITECH雙向可編程直流電源能夠在輸出電流和吸收電
2025-10-23 10:16:50926 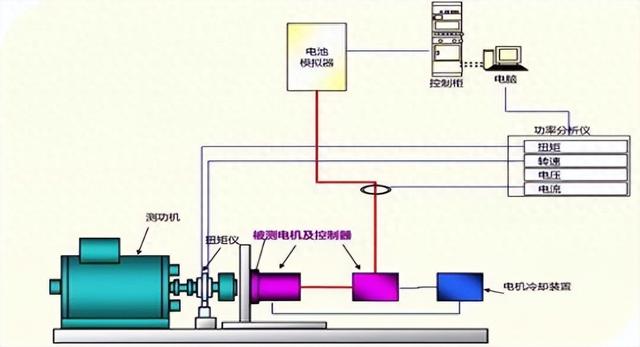
DRV8872設(shè)備是用于打印機、電器、工業(yè)設(shè)備和其他小型機器的有刷直流電機驅(qū)動器。兩個邏輯輸入控制 H 橋驅(qū)動器,該驅(qū)動器由四個 N 溝道 MOSFET 組成,可以雙向控制電機,峰值電流高達
2025-10-17 10:11:20457 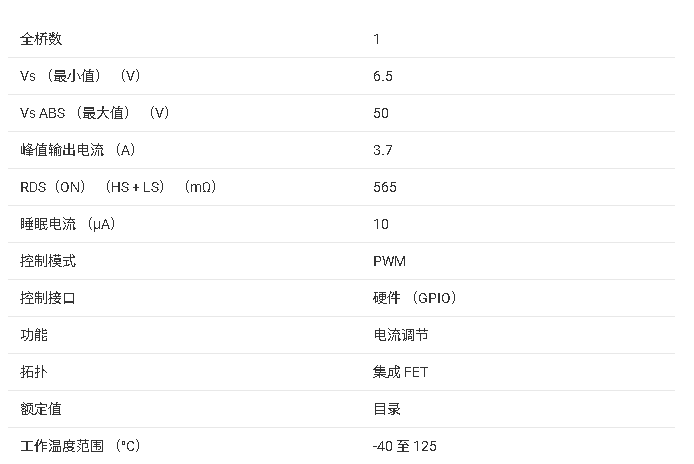
DRV8870 器件是用于打印機、電器、工業(yè)設(shè)備和其他小型機器的有刷直流電機驅(qū)動器。兩個邏輯輸入控制 H 橋驅(qū)動器,該驅(qū)動器由四個 N 溝道 MOSFET 組成,可以雙向控制電機,峰值電流高達
2025-10-17 10:06:15627 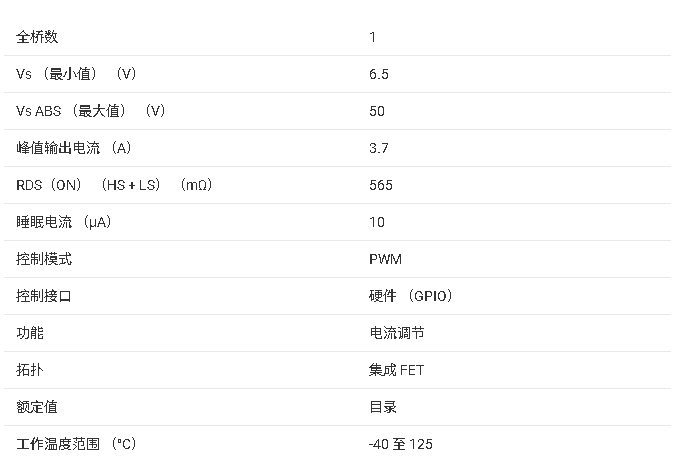
可見,在忽略電樞電阻和功率開關(guān)壓降的情況下,無刷直流電機的轉(zhuǎn)速僅和電樞電壓及磁場強度有關(guān),其調(diào)速方法:a調(diào)壓調(diào)速;b弱磁調(diào)速兩種,類似于直流有刷電機調(diào)速。其中,調(diào)壓調(diào)速因采用額定勵磁可實現(xiàn)額定轉(zhuǎn)矩輸出,故適用于恒轉(zhuǎn)矩負載基速范圍內(nèi)調(diào)速,且方法簡單易于實現(xiàn)而得到廣泛應(yīng)用。
2025-10-09 17:18:303137 
與有刷直流電機相比,無刷直流電機除使用電子換相器取代有刷直流電機電刷機械換向,使用永磁體產(chǎn)生轉(zhuǎn)子磁場外,從結(jié)構(gòu)和工作原理上都和有刷直流電機相類似,故其控制策略也和有刷直流電機類似。
2025-10-09 17:15:343795 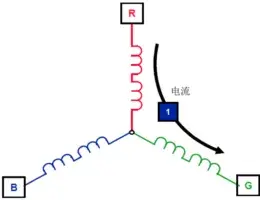
無刷直流電機的運行特性是指電機在起動、正常工作和調(diào)速等情況下,電機外部各可測物理變量之間的關(guān)系。本文在面對CW32電機控制應(yīng)用的相關(guān)開發(fā)與調(diào)試的應(yīng)用中,提供必要且專業(yè)的理論支撐。
2025-10-09 17:12:273383 
Texas Instruments DRV8251 4.1A有刷直流電機驅(qū)動器是一款集成電機驅(qū)動器,具有N溝道半橋、電荷泵、電流調(diào)節(jié)和保護電路。電荷泵通過支持N溝道MOSFET半橋和100%占空比
2025-09-22 14:08:44675 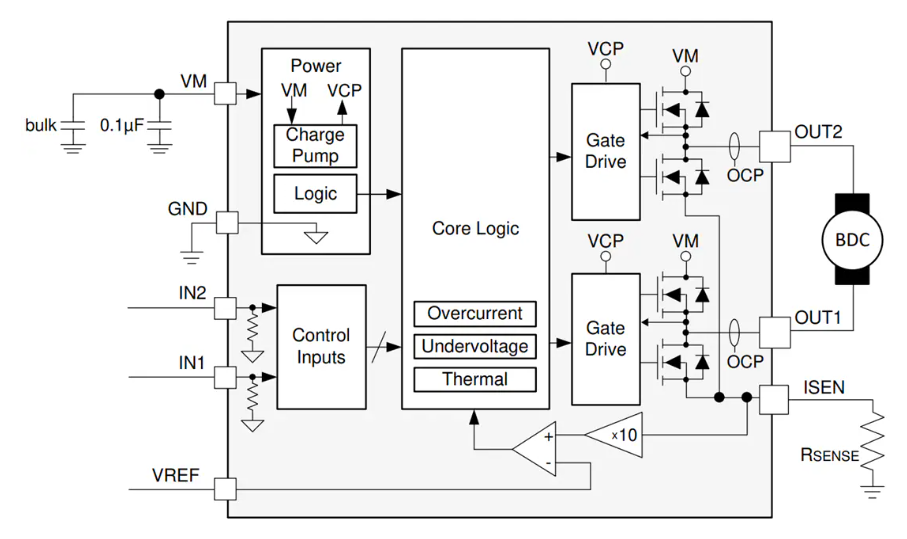
南柯電子|直流電機EMC整改:快速排除干擾,確保穩(wěn)定運行
2025-08-26 10:57:37678 有刷直流電機憑借結(jié)構(gòu)簡單、控制方便等特點,在玩具、家電、汽車等眾多領(lǐng)域得到廣泛應(yīng)用,而其驅(qū)動芯片是控制電機穩(wěn)定、高效運行的核心部件。
2025-08-08 17:07:331825 無位置傳感器無刷直流電機的控制算法是近年來研究的熱點之一,有霍爾位置信號直流電機根據(jù)霍爾狀態(tài)來確定通斷功率器件。利用無刷直流電機的數(shù)學(xué)模型,根據(jù)反電動勢檢測原理,提出了一種新的線反電動勢檢測方法
2025-08-07 14:29:11
在那些對精確度和速度的追求不僅是優(yōu)勢而且是必需的行業(yè)中,對高性能組件的需求從未停歇。20000 rpm的無刷直流電機在這場革命中處于前沿,為各種應(yīng)用提供動力,從先進的醫(yī)療設(shè)備到家用高速鼓風(fēng)機,再到
2025-08-07 13:31:01
針對傳統(tǒng)的無位置傳感器無刷直流電機控制的起動需采用復(fù)雜的軟件、成本高、定位不準確、容易堵轉(zhuǎn)的缺陷,提出了一種通過檢測線電壓差獲得轉(zhuǎn)子位置的方法。提出的方法能在2%的額定轉(zhuǎn)速下準確檢測到轉(zhuǎn)子位置,從而
2025-08-07 13:30:56
針對磁懸浮控制力矩陀螺無刷直流電機電阻、電感值極小的特點和已有的無位置傳感器 I/f 起動算法加速階段換相精度不高且算法復(fù)雜的問題,通過分析電磁轉(zhuǎn)矩和換相時刻的關(guān)系,提出了一種改進的 I/f起動方法
2025-08-06 14:27:39
南柯電子|直流電機EMC整改:從干擾源到解決方案的實戰(zhàn)指南
2025-08-05 11:07:13766 無位置傳感器無刷直流電機的控制算法是近年來研究的熱點之一,有霍爾位置信號直流電機根據(jù)霍爾狀態(tài)來確定通斷功率器件。利用無刷直流電機的數(shù)學(xué)模型,根據(jù)反電動勢檢測原理,提出了一種新的線反電動勢檢測方法
2025-08-04 14:59:43
針對無刷直流電機傳統(tǒng)控制的不足,在 STM32 控制框架內(nèi)設(shè)計了無位置傳感器電機矢量控制系統(tǒng),采用基于鎖相環(huán)的滑模觀測器對轉(zhuǎn)子位置及轉(zhuǎn)速精確估計并完成電機矢量控制。給出控制系統(tǒng)的總體設(shè)計框架及其
2025-08-04 14:42:11
本文分析了現(xiàn)有無刷直流電機軟起動所存在的問題,通過對電機軟起動電路控制拓撲進行優(yōu)化設(shè)計并采用合適的功率管提升負載能力,消除了由于人為因素或電源特性引起的二次起動造成軟起動保護失效,導(dǎo)致過流燒毀功率管
2025-08-01 12:36:06
無刷直流電機導(dǎo)通相換相斷開后在非換相區(qū)間有無電流對電機性能有重要的影響。本文根據(jù)無刷直流電機的工作原理,通過建立無刷直流電機的筒化等效模型,揭示了無刷直流電機斷開相電流產(chǎn)生的條件和計算方程,給出
2025-08-01 12:29:59
為了解決永磁無刷直流電機(BLDOM)因其安裝三個霍爾傳感器而帶來的結(jié)構(gòu)復(fù)雜、維修困難、對溫度很敏感等問題,國內(nèi)外開始對無位置傳感器檢測無刷直流電機轉(zhuǎn)子位置的控制策略進行了大量研究。目前最常用的方法
2025-07-30 15:57:25
為監(jiān)測某醫(yī)療器械在患者體內(nèi)的運行狀況,研究一種通過無刷直流電機負載電流變化判斷設(shè)備運行狀態(tài)的評估方法。分析無刷直流電機工作特性及負載電流特性,建立系統(tǒng)數(shù)學(xué)模型和仿真模型,并通過仿真及實驗結(jié)果分析
2025-07-29 16:25:56
直流電機在大負載、高轉(zhuǎn)速條件下的控制性能。
純分享帖,點擊下方附件免費獲取完整資料~~~
內(nèi)容有幫助可以關(guān)注、點贊、評論支持一下,謝謝!
【免責(zé)聲明】本文系網(wǎng)絡(luò)轉(zhuǎn)載,版權(quán)歸原作者所有。本文所用視頻、圖片、文字如涉及作品版權(quán)問題,請第一時間告知,刪除內(nèi)容,謝謝!
2025-07-29 16:24:38
,該方法能在直流無刷電機靜止和低速時能夠可靠地檢測出轉(zhuǎn)子位置,驗證了該方法對無刷直流電機起動的有效性.
純分享帖,點擊下方附件免費獲取完整資料~~~
內(nèi)容有幫助可以關(guān)注、點贊、評論支持一下,謝謝
2025-07-28 15:04:59
摘 要:針對應(yīng)用在不能反轉(zhuǎn)場合采用無位置控制技術(shù)的無刷直流電機,分析了其繞組等效電感和轉(zhuǎn)子初始位置的關(guān)系。設(shè)計了一套通過注入檢測電壓矢量,比較對應(yīng)母線電流大小關(guān)系來確定轉(zhuǎn)子初始位置的方法,并分析了
2025-07-24 11:53:09
,控制精度較差。針對上述不足,設(shè)計了一種三相無刷直流電機的控制系統(tǒng)。以意法半導(dǎo)體的STM32FI03VET6 為控制器,采用由電流環(huán)和轉(zhuǎn)速環(huán)構(gòu)成的雙閉環(huán)控制系統(tǒng),其中轉(zhuǎn)速環(huán)采用模糊 PID 算法,電流
2025-07-23 13:28:30
摘 要:針對磁懸浮控制力矩陀螺無刷直流電機電阻、電感值極小的特點和已有的無位置傳感器 I/f起動算法加速階段換相精度不高且算法復(fù)雜的問題,通過分析電磁轉(zhuǎn)矩和換相時刻的關(guān)系,提出了一種改進的 If起動
2025-07-23 13:19:35
在工業(yè)自動化、智能設(shè)備等領(lǐng)域,直流電機的調(diào)速控制至關(guān)重要,而單片機憑借其靈活的控制能力,成為實現(xiàn)直流電機精準調(diào)速的核心部件。單片機直流電機調(diào)速技術(shù)通過程序控制,能讓電機在不同工況下保持穩(wěn)定的轉(zhuǎn)速
2025-07-17 13:42:27583 摘 要:根據(jù)小型排爆機器人在精確移動及可靠跨越障礙方面對電機驅(qū)動的特殊要求,提出一種基于BTS7970驅(qū)動芯片的直流電機驅(qū)動系統(tǒng)的設(shè)計方案,詳細介紹了系統(tǒng)的硬件電路和基于PWM控制轉(zhuǎn)速的軟件實現(xiàn)方法
2025-07-16 18:59:20
在精密運動控制領(lǐng)域,永磁直流電機因其優(yōu)于交流電機的可控性,被廣泛應(yīng)用于需精準調(diào)節(jié)速度、扭矩或位置的場景。美蓓亞三美有刷直流電機當(dāng)前主流直流電機分為有刷電機與無刷電機(BLDC)兩大技術(shù)路線——前者
2025-07-16 10:15:043223 
。
本課題所設(shè)計的無刷直流電機控制器的系統(tǒng)框圖。PSoC的輸入信號有:轉(zhuǎn)把電壓信號、剎車信號、其他信號(三速選擇信號、巡航信號、電制動信號、報警器信號、電流信號和電池電壓信號)。輸出信號有:電機驅(qū)動
2025-07-15 15:19:57
摘要:超前或滯后換相會造成無刷直流電機(BLDCM)輸出轉(zhuǎn)矩的減小和系統(tǒng)效率的降低。以平均電磁轉(zhuǎn)矩最大化為目標,提出了一種基于擴展卡爾曼濾波算法的無刷直流電機最佳換相時刻估算方法。該方法建立了平均
2025-07-10 16:41:57
摘 要:針對無位置傳感器無刷直流電機的啟動問題,提出了對三段式閉環(huán)啟動中的預(yù)定位,外加速過程的改進方法。在轉(zhuǎn)子定位階段采用基于空間電壓矢量調(diào)制的短時脈沖來獲得轉(zhuǎn)子初始位置,精度可達15”。加速階段
2025-07-10 16:37:08
在無刷直流電機控制系統(tǒng)的仿真中如何快速動態(tài)地求解無刷直流電機的狀態(tài)方程組是一個關(guān)鍵問題在 Matlab/Simulink 環(huán)境中,利用C語言形式的系統(tǒng)函數(shù)來構(gòu)建仿真模塊,可靈活快速地實現(xiàn)復(fù)雜系統(tǒng)
2025-07-09 14:17:25
轉(zhuǎn)矩脈動是影響無劇直流電機在高精度伺服系統(tǒng)中應(yīng)用的主要原因。提出了一種基于a-p變換和Lyapunov函數(shù)的轉(zhuǎn)矩脈動抑制直接功率控制方法。該方法在a-β坐標系下通過功率控制優(yōu)化了電磁有功功率和電磁
2025-07-09 14:12:15
1.使用無刷直流電機的必要性
目前,現(xiàn)場大量使用的 ZD6 系列電動轉(zhuǎn)轍機,采用普通直流串激電動機作為動力源,具有運行效率高和調(diào)速性能好等優(yōu)點。但傳統(tǒng)的直流電動機均采用電刷,以機械方法進行換相,其
2025-07-08 18:47:09
滯環(huán)PWM控制方式對系統(tǒng)仿真,使系統(tǒng)更直觀、簡化,更加貼近實際控制系統(tǒng),為無刷直流電機無位置傳感控制系統(tǒng)的設(shè)計與調(diào)試提供了新的方法。仿真結(jié)果得到的三相行電流波形和反電動勢波形與理論分析得到的波形一致
2025-07-08 18:37:06
純分享帖,點擊下方附件免費獲取完整資料~~~
*附件:無刷直流電機雙閉環(huán)模糊自適應(yīng)控制方法研究.pdf
【免責(zé)聲明】本文系網(wǎng)絡(luò)轉(zhuǎn)載,版權(quán)歸原作者所有。本文所用視頻、圖片、文字如涉及作品版權(quán)問題,請第一時間告知,刪除內(nèi)容,謝謝!
2025-07-08 18:35:22
摘 要:為了便于對無刷直流電機的運行特性和控制策略的研究,文章詳細的介紹了無刷直流電機工作原理和數(shù)學(xué)模型,提出無刷直流電機的控制策略,采用電流環(huán)為內(nèi)環(huán),速度環(huán)為外環(huán)的雙閉環(huán)控制,并根據(jù)數(shù)學(xué)模型搭建
2025-07-08 18:33:31
Toolbox2.3提供的豐富的模塊庫,基于BLDCM 數(shù)學(xué)模型的分析,提出了一種簡化的BLDC控制系統(tǒng)建模方法,在MallabSimulink中建立獨立的功能模塊,并對這些功能模塊進行有機整合,搭建出無刷直流電機
2025-07-07 18:36:01
無刷直流電機具有無電刷和換相火花,體積小,低噪聲等諸多優(yōu)點,廣泛應(yīng)用在當(dāng)今的控制系統(tǒng)中。目前對無刷直流電機的控制主要由單片機和DSP實現(xiàn)。但是其外圍電路復(fù)雜,對系統(tǒng)的穩(wěn)定性和可靠性有較大
2025-07-07 18:33:19
永磁無刷直流電機(BLDCM)結(jié)構(gòu)簡單、運行效率高、調(diào)速性能好,隨著電力電子技術(shù)的快速發(fā)展,其在工業(yè)領(lǐng)域中的應(yīng)用日益廣泛。無刷直流電機變頻調(diào)速系統(tǒng)中逆變器的功率半導(dǎo)體器件及其控制電路是最易發(fā)生故障
2025-07-07 18:31:40
摘要:為了提高無刷直流電機控制系統(tǒng)的動、靜態(tài)性能,將模糊控制結(jié)合PID控制算法應(yīng)用到無刷直流電機速度控制系統(tǒng)中。在分析了無刷直流電機速度控制系統(tǒng)的基礎(chǔ)上,利用PSIM與MATLAB/Simuiink
2025-07-07 18:29:15
摘 要:為了實現(xiàn)負載變化情況下轉(zhuǎn)速的快速跟蹤控制,采用模糊PI控制器,改變傳統(tǒng) PI控制器的固定參數(shù)的控制策略,采用根據(jù)跟蹤誤差信號來實時控制參數(shù)的方法。無刷直流電機建模過程中,給出了較理想
2025-07-07 18:26:53
摘 要:從無刷直流電機(BIDCM)的工作原理和結(jié)構(gòu)出發(fā),在分析了 BLDCM數(shù)學(xué)模型的基礎(chǔ)上,采用模塊化方法,在Matlab/Simulink 中建立了 BLDCM 轉(zhuǎn)速、電流雙閉環(huán)控制系統(tǒng)模型
2025-07-07 18:25:26
和穩(wěn)定條件。在此基礎(chǔ)上,提出無刷直流電機直接轉(zhuǎn)矩控制。該方法采用轉(zhuǎn)矩滯環(huán)的輸出和磁極位置來選撣電壓空間矢量,可有效抑制非理想反電勢和低速換相電磁轉(zhuǎn)矩脈動。仿真結(jié)果證明了其正確性。
純分享帖,點擊下方
2025-07-07 18:20:26
摘要:分析了BLDCM的數(shù)學(xué)模型,運用MATLAB仿真軟件搭建了無刷直流電機控制系統(tǒng)的仿真模型。本系統(tǒng)采用了速度PID控制、電流遲滯控制的雙閉環(huán)控制方案,電流遲滯控制是為了更方便地跟蹤PWM信號并
2025-06-27 16:52:53
摘 要:無刷直流電機(BLDCM)電流滯環(huán)控制系統(tǒng)中轉(zhuǎn)速調(diào)節(jié)器因存在電流限幅環(huán)節(jié)會產(chǎn)生積分飽和現(xiàn)象,從而導(dǎo)致了控制系統(tǒng)的超調(diào)最增大,動、穩(wěn)態(tài)性能變差等一系列問題。為此,對 BLDCM電流滯環(huán)控制系統(tǒng)
2025-06-27 16:51:20
摘要:無刷直流電機(BLDCM)應(yīng)用范圍廣,易于控制,但缺點是轉(zhuǎn)矩脈動較大。通過分析HPWM-LON調(diào)制方法對無刷直流電機換相期間電轉(zhuǎn)矩的影響,提出一種改進的HON-LON和HPWM-LON相結(jié)合
2025-06-27 16:49:51
的無刷直流電機控制,定子鏈可近似認為保持不變。然而,對磁鏈幅值的控制將會改變電機繞組的固定導(dǎo)通方式,僅通過控制定子磁鏈旋轉(zhuǎn)速度就可以實現(xiàn)電機的有效控制。在此基礎(chǔ)上提出了一種新穎的無刷直流電機直接轉(zhuǎn)矩
2025-06-27 16:45:54
摘要:本文詳細分析了無刷直流電機制動過程及回饋能量產(chǎn)生的機理,給出了過壓保護電路及泵升電容、泵升電阻的計算公式,此計算方法適用于解決無刷直流電機制動狀態(tài)下電壓過高的情況。
純分享帖,點擊下方附件免費
2025-06-27 16:43:50
摘要:提出了一種新型的逆變器結(jié)構(gòu),將傳統(tǒng)的三相橋逆變器中與功率開關(guān)管反并聯(lián)安裝的續(xù)流二極管獨立開,通過采用磁感應(yīng)式電流傳感器,實現(xiàn)無刷直流電機的非換相相電流的采樣,從而使得電磁轉(zhuǎn)矩的精確控制
2025-06-27 16:42:50
摘要:針對無刷直流電機方波驅(qū)動出力大,正弦波驅(qū)動轉(zhuǎn)矩脈動和噪聲小的特點,設(shè)計了基于霍耳傳感器信號的無刷直流電機方波與正弦波復(fù)合驅(qū)動器。在不改動硬件電路的前提下,利用軟件編程實現(xiàn)了無刷直流電機的方波
2025-06-27 16:39:57
附件免費獲取完整資料~~~
*附件:無刷直流電機反電勢過零檢測新方法.pdf
【免責(zé)聲明】本文系網(wǎng)絡(luò)轉(zhuǎn)載,版權(quán)歸原作者所有。本文所用視頻、圖片、文字如涉及作品版權(quán)問題,請第一時間告知,刪除內(nèi)容,謝謝!
2025-06-26 13:50:59
摘 要:通過對無刷直流電機開通期間的相電流和關(guān)斷期間的相電流分析,經(jīng)過實際計算得到電磁轉(zhuǎn)矩的表達式,得到相應(yīng)的電磁轉(zhuǎn)矩脈動曲線。基于電流預(yù)測方法通過將預(yù)測模型分為模型建立、反饋調(diào)整和性能優(yōu)化3步
2025-06-26 13:49:03
摘要 :近幾年,無刷直流電機在工業(yè)控制領(lǐng)域的應(yīng)用越來越廣泛,而有效的電流測量是控制方法實現(xiàn)的前提,也是提高控制性能的基礎(chǔ)。本文基于 TIS320LF2407ADSP 控制器,對無刷直流電機
2025-06-26 13:45:15
[摘要]為使無刷直流電機電動汽車在冰雪等低附著路面上進行純再生制動時,驅(qū)動輪仍具有防抱死功能采用了雙閉環(huán)控制策略。文中首先闡述了雙管調(diào)制下的無刷直流電機再生制動機理;提出了通過控制PWM 占空比
2025-06-26 13:43:24
摘一要:設(shè)計了一種采用 TMS320LF2407DSP作為主控制器,集成 IGBT 作為功率驅(qū)動元件的無刷直流電機控制器,對電機轉(zhuǎn)速和電流的雙閉環(huán) PID 調(diào)節(jié)。通過在跑步機上的試驗表明該控制器調(diào)速
2025-06-26 13:39:56
摘 要:為了使無刷直流電機長期穩(wěn)定運行,采用加保護電路的方法使其正常工作,保護電路主要由欠壓保護,過流保護、短路保護等組成,在軟件里設(shè)置電壓,電流的間值,直接對電壓,電流進行檢測并產(chǎn)生相應(yīng)的保護
2025-06-26 13:38:27
摘要:研究了一種基于專家系統(tǒng)的單神經(jīng)元PI控制器,并將其應(yīng)用于無刷直流電機調(diào)速系統(tǒng)中。控制器實現(xiàn)了PI參數(shù)的在線調(diào)整,在具有PID控制器良好動態(tài)性能的同時,減少微分項對系統(tǒng)穩(wěn)態(tài)運行時的影響,并較好
2025-06-26 13:34:07
BLDCM上位機監(jiān)控系統(tǒng)。實測的相電流為近似正弦波,監(jiān)控系統(tǒng)顯示轉(zhuǎn)速波動小,電機運行平穩(wěn)。
純分享帖,點擊下方附件免費獲取完整資料~~~
*附件:無刷直流電機磁場定向控制系統(tǒng)研究.pdf
【免責(zé)聲明】本文
2025-06-26 13:31:39
摘 要:針對現(xiàn)有無刷直流電機轉(zhuǎn)矩脈動抑制方法存在抑制效果不理想,或脈動抑制效果好但學(xué)習(xí)算法復(fù)雜,不利于推廣的問題,將RBF神經(jīng)網(wǎng)絡(luò)與磁場定向控制相結(jié)合,選用Luminary615微控制器和無刷電機
2025-06-25 13:15:52
摘要:研究了一種改進型無刷直流電機脈寬調(diào)制策略。在傳統(tǒng)的無刷直流電機脈寬調(diào)制技術(shù)的基礎(chǔ)上,針對調(diào)制期間開關(guān)管斷開時的電機繞組電流無法有效控制問題,研究了一種基于六開關(guān)電壓源型逆變器的四管調(diào)制策略
2025-06-13 09:37:27
純分享帖,需要者可點擊附件免費獲取完整資料~~~*附件:節(jié)能空調(diào)用無刷直流電機的無位置傳感器控制方法.pdf【免責(zé)聲明】本文系網(wǎng)絡(luò)轉(zhuǎn)載,版權(quán)歸原作者所有。本文所用視頻、圖片、文字如涉及作品版權(quán)問題,請第一時間告知,刪除內(nèi)容!
2025-06-04 14:38:04
。MAX22212驅(qū)動器具有精確的電流驅(qū)動調(diào)節(jié) (CDR) 功能,可限制有刷直流電機的啟動電流或控制步進操作的相電流。這些驅(qū)動器支持四種不同的衰減方法,即慢速衰減、快速衰減和兩種混合衰減模式。典型應(yīng)用包括步進電機驅(qū)動器、有刷直流電機驅(qū)動器、電磁閥驅(qū)動器和鎖存閥。
2025-06-04 14:19:48650 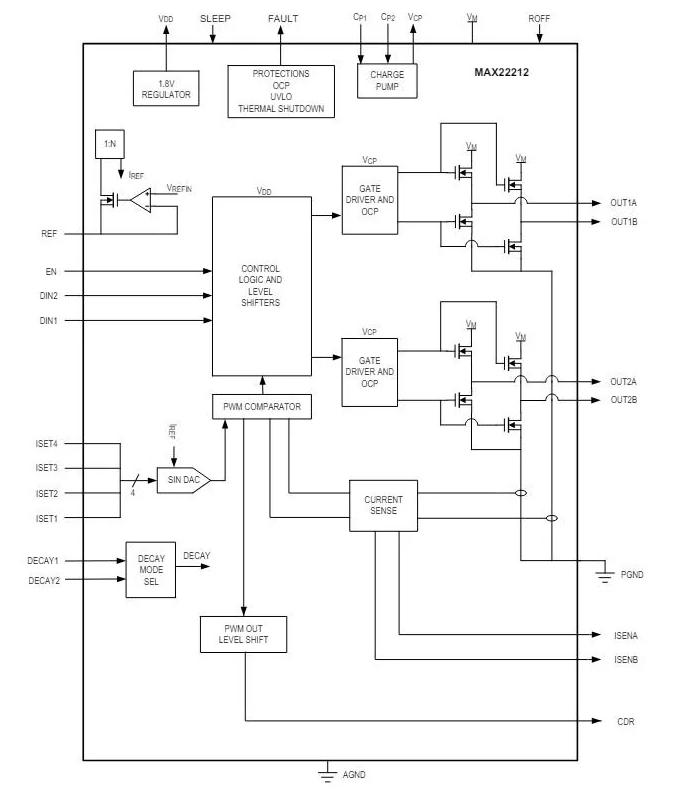
換向器電機。這是模型中除了有刷電機以外用的最多的一種電機,無刷直流電機不使用機械的電刷裝置,采用方波自控式永磁同步電機,與有刷電機相比,它將轉(zhuǎn)子和定子交換,即無刷
2025-05-30 19:34:063999 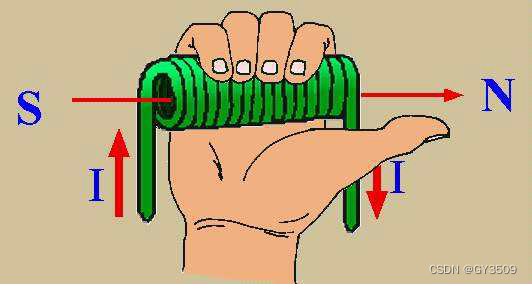
直流無刷電機是通過電子控制器實現(xiàn)換向取代傳統(tǒng)帶碳刷的直流電機。常用電機類型多樣,主要可以分為無刷電機和有刷電機。BLDC電機是一種不使用機械換向觸頭(碳刷)的直流電機,而是通過電子控制器實現(xiàn)換向取代
2025-05-29 17:05:51868 
純分享帖,需要者可點擊附件免費獲取完整資料~~~*附件:霍爾傳感器在直流電機轉(zhuǎn)速測量中的應(yīng)用研究.pdf【免責(zé)聲明】本文系網(wǎng)絡(luò)轉(zhuǎn)載,版權(quán)歸原作者所有。本文所用視頻、圖片、文字如涉及作品版權(quán)問題,請第一時間告知,刪除內(nèi)容!
2025-05-29 14:12:26
南柯電子|直流電機EMC整改:怎么選擇?功率多少?
2025-05-29 09:36:39829 
通過分析學(xué)習(xí)速率對BP算法的影響,提出一種分層調(diào)整學(xué)習(xí)速率的改進BP 網(wǎng)絡(luò)算法,并把該方法設(shè)計成 PID控制器應(yīng)用在無刷直流電機控制系統(tǒng)中,仿真結(jié)果驗證了基于改進的 BP 網(wǎng)絡(luò)的PID控制器
2025-05-28 15:42:21
? ? ? ? BDR6170T 是一款大功率直流電機驅(qū)動芯片,用于驅(qū)動直流電機或步進電機的一個繞組,適用于打印機、掃地機、按摩椅等電器及工業(yè)設(shè)備。兩路輸入邏輯控制 H橋驅(qū)動器,輸出3.6A 的電流
2025-05-27 17:21:59 3
3 運動的原理都是依靠磁場,要么利用磁場的異性相吸,要么利用磁場的同性互斥。無刷直流電機和有刷直流電機的主要區(qū)別在于,無刷電機電流的大小和方向是通過控制器來改變的。通常,定
2025-05-23 21:00:166984 
基于L298N與stm32的直流電機調(diào)速,實驗結(jié)果良好,可以根據(jù)調(diào)節(jié)STM32的PWM占空比來進行直流電機的調(diào)速。實驗系統(tǒng)圖如下:
L298N驅(qū)動模塊
純分享貼,有需要可以直接下載附件獲取完整資料!
(如果內(nèi)容有幫助可以關(guān)注、點贊、評論支持一下哦~)
2025-05-14 15:01:30
深圳南柯電子|直流電機EMC整改:從驅(qū)動系統(tǒng)到整車的協(xié)同優(yōu)化
2025-05-14 11:08:581037 
異步電機--也是一種交流電機,運行中轉(zhuǎn)速不為同步轉(zhuǎn)速,異步電機主要用于電動機.還有其他分類方法,但不論哪種方法都不是絕對的.本教材按照變壓器、直流電機、同步電機、異步電機的順序分別進行闡述.從具體電機
2025-05-10 19:20:24
直流電機的試驗項目,應(yīng)包括下列內(nèi)容:1測量勵磁繞組和電樞的絕緣電阻;2測量勵磁繞組的直流電阻;3勵磁繞組和電樞的交流耐壓試驗;4測量勵磁可變電阻器的直流電阻;5測量勵磁回路連同所有連接設(shè)備的絕緣電阻
2025-05-06 10:38:07646 
uln2003驅(qū)動不了直流電機,仿真可以正常運行,實物不行
用了簡單的代碼
#include<reg52.h>
sbit zhuan=P2^0;
void main()
{
zhuan=1;
}
2025-04-14 19:12:50
、船舶、航空、機械等行業(yè),在一些高精尖產(chǎn)品中也 有廣泛應(yīng)用,如錄像機、復(fù)印機、照相機、手機、精密機床、銀行點鈔機、捆鈔機等。在舞臺燈光方面,永磁直流電機,特別是小型永磁直流齒輪電機的用量非常大。計算機行業(yè)
2025-03-31 15:42:12
針對無刷直流電機的控制方法進行了深入研究 。根據(jù)無刷直流電機實際物理模型建立相應(yīng)的數(shù)學(xué)模型,電機使用雙閉環(huán)進行控制 。根據(jù)電機的實際工作特點,使用模糊自適應(yīng) PID 算法替代常規(guī) PID 算法建立
2025-03-27 12:15:55
以前控制直流電機多由單片機完成。該方式缺點是接口繁瑣、速度慢,且不易在高溫、高壓等惡劣環(huán)境下工作[1]。采用一種新型直流電機控制器——DSP 控制器解決了單片機控制的缺點,其具備很多優(yōu)點,該控制器
2025-03-25 15:25:44
的關(guān)系。提出了一種無刷直流電機霍耳信號與定子繞組關(guān)系自學(xué)習(xí)方法,該方法通過不同的繞組通電組合將電機轉(zhuǎn)子依次轉(zhuǎn)到6個不同的位置并記錄對應(yīng)的霍耳信號,然后得出霍耳信號與定子繞組的對應(yīng)關(guān)系。所提出的方法快速
2025-03-25 15:15:41
芯朋微集成霍爾傳感器的可編程單相無刷直流電機驅(qū)動芯片-PN7791 一、概述PN7791是一款可編程單相無刷直流電機驅(qū)動芯片,內(nèi)部集成功率MOSFETs和霍爾效應(yīng)傳感器,可以驅(qū)動峰值電流
2025-03-22 10:47:49
手指的空心杯電機,讓我記憶深刻。主要原因是,進入IVD行業(yè)后做的第一款產(chǎn)品,里面用到了一款電機,用于反應(yīng)液的攪拌混勻,品牌為Faulhaber(德國),外形與普通直流電機并無差異,但價格很貴,當(dāng)時沒有太注意
2025-03-21 12:23:10
無刷直流電機資料合集, 純屬分享,有需要資料可下載附件
2025-03-20 13:13:39
介紹了一種基于成本較低的AT89S52 單片機實現(xiàn)的數(shù)字式雙閉環(huán)PWM 直流電機調(diào)速系統(tǒng)硬件 實現(xiàn)電路和軟件實現(xiàn)方法。給出由光電編碼器檢測直流電機轉(zhuǎn)速的具體方法,并構(gòu)成速度環(huán);由霍爾電流傳感器檢測
2025-03-20 12:55:42
一、概述從簡單的鉆機到復(fù)雜的工業(yè)機器人,許多機器設(shè)備都使用無刷直流電機將電能轉(zhuǎn)換為旋轉(zhuǎn)運動。無 刷直流電機也稱為 BLDC 電機,相比有刷直流電機具備諸多優(yōu)勢。BLDC 電機更高效,所需的維護更少
2025-03-19 14:29:432 本文提出了一種采用脈沖注入來檢測無刷直流電機在靜止?fàn)顟B(tài)時轉(zhuǎn)子位置的方法。基
于方法依次向定子繞組注入一系列的脈沖,通過脈沖電流的變化對轉(zhuǎn)子位置進行估算。實驗
結(jié)果表明:該方法不但具有較高的位置檢測準確性,同時對電機的參數(shù)依賴性低,可以省去
電機內(nèi)部的檢測元件,又可以應(yīng)用到其它電機。
2025-03-14 16:24:10
一、幾個術(shù)語解釋(極對數(shù)、相數(shù)、電角度、電角頻率、相電壓、線電壓、反電動勢)二、無刷直流電機的運行原理(運行原理、數(shù)學(xué)模型)三、無刷直流電機的基本控制方法(各參數(shù)相互關(guān)系、換流過程與換流模式)四、車用無刷直流電機及其控制系統(tǒng)(基本控制、弱磁控制)點擊免費下載查閱全文
2025-03-14 14:18:40
Holtek新推出內(nèi)建110V N/N預(yù)驅(qū)的無刷直流電機專用Flash MCU,擴展MCU整合預(yù)驅(qū)的系列性,并滿足電機產(chǎn)品不同電壓的需求。
2025-03-12 15:45:041204 1 直流電機的工作原理、主要結(jié)構(gòu)、額定值 2直流電機的電樞繞組
3直流電機的電樞反應(yīng)
4電樞繞組感應(yīng)電動勢和電磁轉(zhuǎn)矩
5直流電機換向
一文帶你了解直流電機基本知識,免費下載
2025-02-28 01:28:38
1.Z2 系列小型直流電機為中華人民共和國機械工業(yè)部 JB1104-68 部頒標準所規(guī)定的標準系列小型直流電機。 2.Z2 系列小型直流電機共分 11 個機座號,每個機座號有兩種鐵心長度,制造有
2025-02-28 01:25:00
直流電機(direct current machine)是指能將直流電能轉(zhuǎn)換成機械能(直流電動機)或?qū)C械能轉(zhuǎn)換成直流電能(直流發(fā)電機)的旋轉(zhuǎn)電機。它是能實現(xiàn)直流電能和機械能互相轉(zhuǎn)換的電機。當(dāng)它作
2025-02-27 01:06:07
本章主要討論直流電機的基本結(jié)構(gòu)和工作原理,討論直流電機的磁場分布、感應(yīng)電動勢、電磁轉(zhuǎn)矩、電樞反應(yīng)及影響、換向及改善換向方法,從應(yīng)用角度分析直流發(fā)電機的運行特性和直流電動機的工作特性。
2025-02-27 01:03:56
無刷直流電動機的工作原理普通直流電動機的電樞在轉(zhuǎn)子上,而定子產(chǎn)生固定不動的磁場。為了使直流電動機旋轉(zhuǎn),需要通過換向器和電刷不斷改變電樞繞組中電流的方向,使兩個磁場的方向始終保持相互垂直,從而產(chǎn)生恒定
2025-02-27 01:00:12
大功率永磁無刷直流電機驅(qū)動系統(tǒng)由于運行效率高、調(diào)速性能好、可靠性高等優(yōu)點,在國外已成功應(yīng)用于對系統(tǒng)效率、可靠性有特殊要求的推進領(lǐng)域中。然而,國際上關(guān)于大功率永磁無刷電機及其驅(qū)動系統(tǒng)的成套技術(shù)一直對我
2025-02-26 16:24:04
電機轉(zhuǎn)速控制電路(PWM信號)主要采用 L298N ,通過單片機的 I/O 輸入改變芯片控制端的電平,即可以對電機 進行正反轉(zhuǎn),停止的操作,輸入引腳與輸出引腳的邏輯關(guān)系圖為驅(qū)動直流電機和步進電機的詳細資料可下載PDF文檔![hide]
[/hide]
2025-02-26 16:02:15
 電子發(fā)燒友App
電子發(fā)燒友App









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論