 電子發燒友App
電子發燒友App



隨著科技的發展人們社會中的各類智能機器也越來越多,這里對機器人的運動簡單介紹。
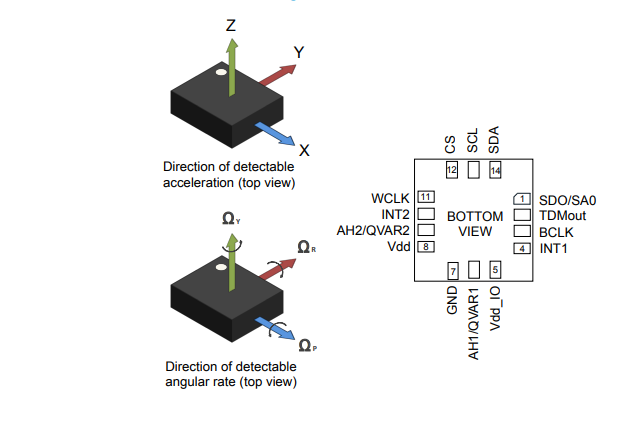
機器人運動主要靠三軸傾角傳感器進行的運動狀態、姿態控制中起到非常關鍵的作用,MEMS加速度計作為重要的傾角檢測器件,因為有著體積小、重量輕、功能小、成本低、可靠性高易于實現數字化和智能化,逐漸取代傳統姿態測量器件陀螺應用于微型機器人。
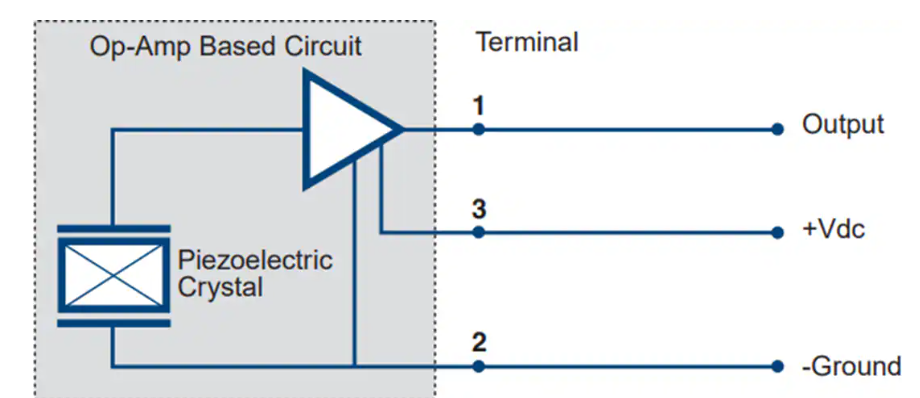
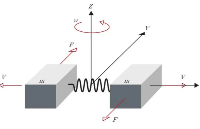
電容式微加速度計是最常見的,也有成熟推廣的產品。其基本原理就是將電容作為檢測接口,來檢測由于慣性力作用導致慣性質量塊發生的微位移。質量塊由彈性微梁支撐連接在基體上,檢測電容的一個極板一般配置在運動的質量塊上,一個極板配置在固定的基體上。圖2所示為典型的三明治結構的平板電容式微加速度計。還有AD?公司開發的電容式微加速度計采用梳齒陣列電容作為檢測接口。電容式微加速度計的靈敏度和測量精度高、穩定性好、溫度漂移小、功耗極低,而且過載保護能力較強;能夠利用靜電力實現反饋閉環控制,顯著提高傳感器的性能,因為有著靈敏性常被用于運動機器人人的動態、姿態控制。
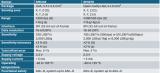
| 參數 ?| ?型號 | 單位 | SiA202 | SiA205 | SiA210 | SiA215 | SiA220 | SiA230 | SiA250 |
| 量程 | g | ±2 | ±5 | ±10 | ±15 | ±20 | ±30 | ±50 |
| 偏值 | mg | 0.14 | 0.35 | 0.7 | 1.05 | 1.4 | 2.1 | 3.5 |
| 偏值穩定性 | mg | 0.24 | 0.6 | 1.2 | 1.8 | 2.4 | 3.6 | 6 |
| 偏值重復性 | μg | 3 | 7.5 | 15 | 22.5 | 30 | 45 | 75 |
| 標度因數 | mV/g | 1350 | 540 | 270 | 180 | 135 | 90 | 54 |
| 標度因數穩定性 | ppm | 120 | ||||||
| 失準角 | mrad | 10 | ||||||
| 閾值(1Hz) | μg rms | 7 | 17 | 34 | 51 | 68 | 102 | 170 |
| 非線性(IEEE ) | % FS | 0.3 | ||||||
| 工作溫度 | ℃ | -40~125 | ||||||
| 功耗 | mW | 10 | ||||||
| 尺寸 | mm2 | 9×9 |
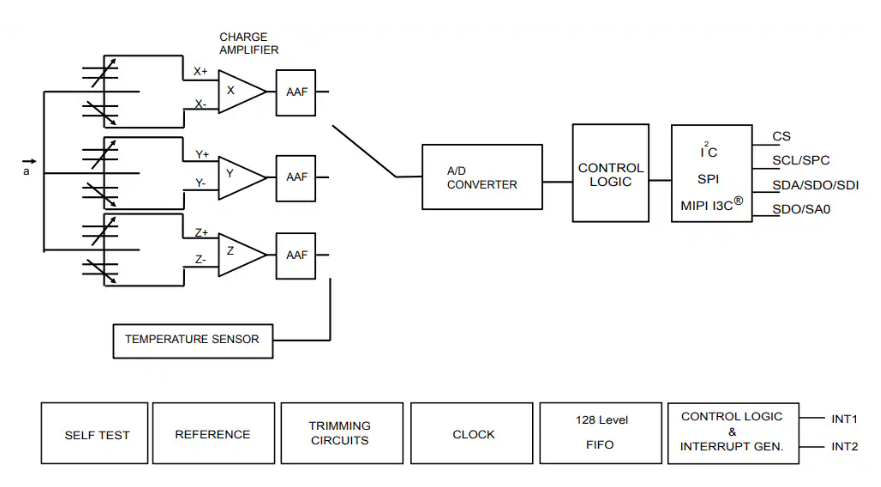
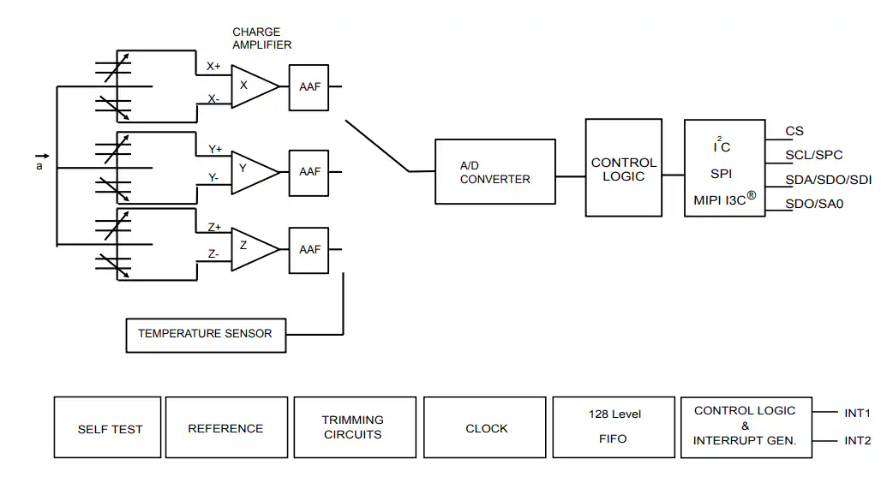
這是一款高精度mems加速度計芯片的性能指標參數。lw






















































 工商網監
工商網監
評論