 電子發(fā)燒友App
電子發(fā)燒友App



MEMS加速度計(jì)在慣導(dǎo)中的角色
慣性導(dǎo)航系統(tǒng)(INS)也稱作慣性參考系統(tǒng),是一種不依賴于外部信息、也不向外部輻射能量(如無線電導(dǎo)航那樣)的自主式導(dǎo)航系統(tǒng)。其工作環(huán)境不僅包括空中、地面,還可以在水下。
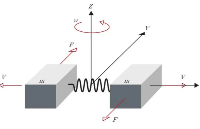
慣性導(dǎo)航的基本工作原理是以牛頓力學(xué)定律為基礎(chǔ),通過測(cè)量載體在慣性參考系的加速度,將它對(duì)時(shí)間進(jìn)行積分,且把它變換到導(dǎo)航坐標(biāo)系中,就能夠得到在導(dǎo)航坐標(biāo)系中的速度、偏航角和位置等信息。慣性導(dǎo)航系統(tǒng)屬于推算導(dǎo)航方式,即從一已知點(diǎn)的位置根據(jù)連續(xù)測(cè)得的運(yùn)動(dòng)體航向角和速度推算出其下一點(diǎn)的位置,因而可連續(xù)測(cè)出運(yùn)動(dòng)體的當(dāng)前位置。慣性導(dǎo)航系統(tǒng)中的陀螺儀用來形成一個(gè)導(dǎo)航坐標(biāo)系,使加速度計(jì)的測(cè)量軸穩(wěn)定在該坐標(biāo)系中,并給出航向和姿態(tài)角;加速度計(jì)用來測(cè)量運(yùn)動(dòng)體的加速度,經(jīng)過對(duì)時(shí)間的一次積分得到速度,速度再經(jīng)過對(duì)時(shí)間的一次積分即可得到位移。
所在在慣導(dǎo)系統(tǒng)中有:IMU、INS、AHRS航姿參考系統(tǒng)、GPS組合慣導(dǎo),其中這些當(dāng)中都是由 mems加速度計(jì)、mems陀螺儀、磁計(jì)、GPS板卡以及解算軟件和電路組成。
MEMS加速度計(jì)主要是針對(duì)載體直線運(yùn)動(dòng)時(shí)候產(chǎn)生的加速度從而積分解算出來的并輸入到解算軟件得出需要的參數(shù),所以mems加速度計(jì)在這里是必不可少。MSME陀螺儀是載體主要在轉(zhuǎn)動(dòng)情況在的提供的準(zhǔn)確的角度可以通過積分解算等到正確的角度方向從而保障載體不會(huì)偏移目的地。
所以說MEMS加速度計(jì)在慣導(dǎo)中的的角色是當(dāng)做一個(gè)直線行駛駕駛員來確定前進(jìn)的速度和積分解算的某一段時(shí)間的距離。lw
























































 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論