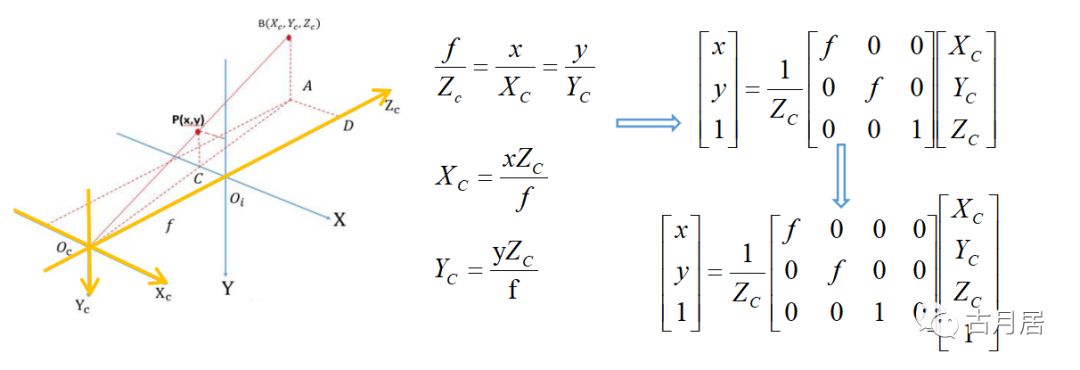
相機將三維世界中的坐標點(單位:米)映射到二維圖像平面(單位:像素)的過程能夠用一個幾何模型來描述,其中最簡單的稱為針孔相機模型 (pinhole camera model),其框架如下圖所示:
2022-07-06 09:16:05 2105
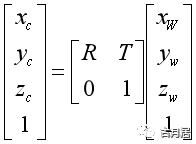
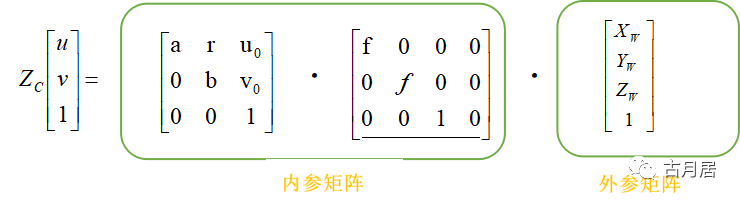
2105 相機標定中所要確定的幾何模型參數分為內參和外參兩種類型。相機內參的作用是確定相機從三維空間到二維圖像的投影關系。相機外參的作用是確定相機坐標與世界坐標系之間相對位置關系。
2022-10-12 16:04:183607 坐標變換是一種線性變換,如無約束,變換就不是唯一的。在電機的系統分析中,所應用的坐標變換可有兩種約束
2023-07-11 15:01:034137 
單目相機標定技術適用于被測表面曲率較小且需要獲取實際數據的應用場合,比如食品、機械制造以及半導體等。
2023-07-21 11:32:274496 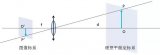
分析PWM整流,逆變裝置時,經常會用到旋轉坐標變換這個分析方法起因是交流側的量都是時變的交流量,不易控制所以書上可以看到對三相坐標變換有如下的描述將三相對稱靜止坐標系(a,b,c)轉換成以電網基波
2017-10-25 14:04:53
一、坐標變換1.1. 三相靜止坐標系(abcabcabc)和兩相靜止坐標系(α/β\alpha/\betaα/β)之間的變換根據圖中所示abcabcabc坐標系和αβ\alpha\betaαβ坐標
2021-08-27 06:18:07
進行傅里葉變換得到的波形圖中,怎么把橫坐標對應的點數變成頻率啊? 求各位大神指導!!!!
2013-07-18 10:15:51
首先坐標系轉換的變換矩陣(沒有坐標系矩陣變換的概念可先百度)如圖:
2019-06-20 18:34:32
Halcon旋轉標定固定相機,從下往上拍照,計算產品到標準位置的偏差,如果產品有角度偏差,那就要額外減去旋轉產生的X、Y偏移,都說取點擬合圓,圓心就是旋轉中心點,可是我擬合出來的圓心轉換成機器人
2021-11-09 15:36:24
幾篇張正友標定方法的英文原文,不少朋友看過張正友標定方法,這里提供他的英文原文。喜歡看英文文獻的,以及愿意更深入理解matlab中相機標定工具箱的朋友可以參考。
2018-05-04 14:43:25
(或者鍵入選項 A);請點取坐標標注方向: 拖動光標定義引線方向,點取標注引線結束點。坐標點還可以在命令行中選擇 A 選項,通過鍵盤輸入完成,注意本命令中以米單位與總圖坐標順序鍵入。請輸入坐標標注點或
2021-03-11 13:38:10
隨著視覺慣性傳感器在自動駕駛、機器人、AR/VR 等領域規模化落地,多相機+IMU 聯合標定需求呈爆發式增長,多相機+IMU 聯合標定領域尚屬空白。
感算商城聯合知名方案公司推出國內首臺量產級
2025-10-23 14:04:48
``【課程推薦】龍哥手把手教你學LabVIEW機器視覺設計教程請問哪位大神有Labview機器視覺相機標定的程序文件,麻煩分享一下?在下不甚感激!qq:599108466.``
2016-05-25 12:36:45
TF功能包能干什么?TF坐標變換如何實現?
2022-02-14 06:29:50
最近在用matlab進行標定,標定的結果能否直接用于labview進行坐標變換?
2014-10-04 19:51:23
相機標定不成功點擊下一步沒反應
2015-04-16 12:58:59
最近在做視覺,需要用labview做相機的標定,通過空間轉換確定空間位置。視覺助手的標定只能標定內參數,沒有辦法做內外參數的標定,哪位大神給指導指導如何做一個標準的標定程序。
2017-04-24 16:08:44
約束條件,分別是變換前后的幅值和功率不變,幅值不變時得到的坐標變換矩陣的系數大小為2/3,而功率不變時得到的坐標變換矩陣的系數大小為sqrt(2/3).另外,值得注意的是在Clark變換過程中我們一般
2018-09-16 13:02:18
的解耦,利用兩相坐標系,可以解決電機矢量控制問題。圖一:三相靜止坐標系與兩相靜止坐標系轉換在三相靜止坐標系中,為ABC三相電源矢量的矢量和,其在ABC軸上的投影分別為:02park變換推導(兩相靜止坐標
2021-08-16 13:42:11
是左右相機拍攝同一塊圓形標定板的圖像,并根據labview自帶的圓點標定板圓點檢測函數得到圓點坐標。下圖是加載圓點標定板標定結果后,加載一對圖像后,鼠標移動到左圖上顯示的距離信息。程序框圖分3部分
2021-09-27 16:52:18
主要內容本文提出了一種不依賴于棋盤格等輔助標定物體,實現像素級相機和激光雷達自動標定的方法。方法直接從點云中提取3D邊特征,一避免遮擋問題,并且使用了精確度更高的深度連續邊。文中首先指出:以下四種
2021-09-01 07:42:19
單元換算到實際單位時的大小,然后根據像素坐標計算實際坐標,那么如果我用相似三角形的原理的話,是不是可以結合它來使用而不進行相機標定求各位迷惑的和搞清楚的人都說一下你們的見解!!謝謝!!
2016-05-20 15:49:27
圖像標定好以后相機檢測到某個點想定位到這個點怎么把圖像坐標轉換到世界坐標呢求指教
2016-04-28 16:41:55
,如何使用大標定板統一坐標來做高精密測量。采用一塊維視圖像大標定板來統一各個相機的坐標,每個大標定板中有若干小標定板,各個小標定板間的位置關系都是已知的,各個相機都能拍攝到一個小標定板。通過各個小標定板可以
2015-11-18 11:05:45
系,XOY為以毫米為單位的圖像坐標系。 圖像中某點在以毫米為單位的圖像坐標系中的坐標與其在以像素為單位的圖像坐標系中的坐標的變換關系如下: 空間某點在世界坐標系中的坐標與其在攝像機坐標系中的坐標變換關系如下
2019-06-04 08:00:00
在電機仿真過程中,需要采用坐標變換理論把交流電機通過坐標變換理論等效為直流電機進行解耦控制,Park(abctodq0/dq0toabc)變換和Clark(abctoαβ/αβtoabc
2021-09-03 06:24:55
小白求助,求相機標定示例
2021-11-22 07:43:41
上一階我們講了異步電機的四大方程,發現異步電機模型非常復雜,中間各個變量相互耦合,我們希望通過更直接,更簡單的方法來分析,這里將引出坐標變換的概念。首先要提出等效的前提,其實就是強調能量守恒:?磁勢
2021-09-03 09:19:51
在機器視覺中,怎么標定坐標原點啊,我用的圖像匹配可以標定一個坐標原點,但是在不同的圖像上會有偏移,怎么才能減小偏移呢。求大家指教一下
2013-01-18 15:53:54
有個項目要用視覺定位,視覺拍好產品之后,把產品的坐標發送到PLC,PLC再執行定位指令。現在查到的資料都沒有涉及這一塊,都是講相機標定,而不是手眼標定。哪位有這方面的資料,怎么用labview實現手眼標定?
2020-05-28 14:42:35
提出一種無相機標定的立體圖像對的極線校正新方法。該校正方法并不依賴基本矩陣F的精確求解,而是通過空間變換法分析校正前后圖像點對應關系,依此分解并參數化描述極線變
2009-04-14 08:40:01 12
12 數字下變頻器中坐標變換模塊的ASIC 實現成都電子科技大學通信與信息工程學院劉欣 林水生 李廣軍摘要:本文介紹了一種基于CORDIC 算法的數字下頻器(DDC)中坐標變換模塊的
2009-12-24 10:54:5013 雙目標定是雙目系統的關鍵技術,本文對雙目系統標定進行理論分析,給出基于變換矩陣的坐標系變換關系。考慮實際情況,提出基于投影法及小波變換的雙目系統標定方法,給出
2010-01-07 14:57:0916 matlab坐標變換
坐標變換
cart2pol 笛卡兒坐標變換為極坐標或圓柱坐標 cart2sph 笛卡兒坐標變換為球坐標
2008-06-18 14:47:502550 中圖儀器GTS坐標定位激光跟蹤儀可以準確測量機器人末端在一系列預定義關節角度下的實際位姿,RobotMaster軟件將測量數據與內部通過DH模型轉換得到的理論值進行計算。根據計算所得偏差,通過軟件
2025-04-25 15:58:22
工程等應用。 GTS激光坐標定位跟蹤測量系統在飛機、汽車、船舶、航天、機器人、核電、軌道交通裝備制造行業以及大型科學工程、工業母機的高精密加工和裝配中,能
2025-05-06 11:41:25
matrox mil開發資料:CALIBRATION相機標定模塊
2015-12-10 16:32:068 什么是攝相機標定?攝相機標定方法的分類?感興趣的小伙伴們可以瞧一瞧。
2016-09-22 12:04:450 dq坐標變換數學原理
2016-12-20 22:56:4819 是準確的,為最終得到立體空間中對象的幾何信息打下堅實基礎。圖像信息與對象幾何信息的對應關系決定了待標定攝像機的內、外參數。簡言之,攝像機的標定就是求解被測目標的世界坐標與所得目標圖像坐標系同時獲得兩個待標定
2017-11-06 14:41:0530 我們首先介紹下計算機視覺領域中常見的三個坐標系:圖像坐標系,相機坐標系,世界坐標系。以及他們之間的關系。然后介紹如何使用張正友相機標定法標定相機。攝像機標定(Camera calibration)簡單來說是從世界坐標系換到圖像坐標系的過程,也就是求最終的投影矩陣的過程。
2017-12-04 16:56:3519087 
OpenCV sample目錄下自帶兩個與相機標定的cpp文件即:calibration.cpp和calibration_artificial.cppcalibration.cpp 是通過用戶輸入
2017-12-04 17:23:263938 
算法實現變得高效;同時,提出了帶有雙層金屬球的校準靶,通過識別小球的投影數據來實現相機標定。在校準點驗證實驗中,可以驗證經變換后的坐標的殘余誤差均不超過0. 002像素;在導航驗證實驗中,借助初步搭建的導航平臺成功實
2017-12-14 15:31:305 針對張正友標定方法中相機內參數的求解可能陷入局部最優解的問題,考慮鏡頭的三階徑向畸變和二階離心畸變,提出一種基于改進遺傳算法的單目相機內參數優化標定方案。該方法可顯著提高相機標定中內參數的精度,并能避免陷入局部最優。最后,實驗驗證了所提方案的有效性和可行性。
2018-01-05 16:11:492 針對借助激光跟蹤儀標定機器人所涉及的坐標系統一問題,對基于空間幾何法擬合建立的基坐標系與機器人理論基坐標系的轉換關系進行了研究,提出了一種基于對偶四元數法的機器人基坐標系標定方法。利用指數積公式推導
2018-03-07 10:43:522 在機器視覺的測量中,我們得到的尺寸并不是我們真實的物體尺寸,而是像素值,那么如何將像素值轉成我們需要表示的實際物體尺寸,此時,需要進行坐標的標定。
2018-12-29 13:56:334848 相機標定可以說是計算機視覺/機器視覺的基礎,但是初學者不易上手,本文將給讀者整理一遍相機標定的邏輯,并在文末回答評論區提出的問題。分為以下內容:
2019-06-01 09:54:155154 
為了在精確測量中盡量消除誤差,標定CCD相機在實際測量環境中的內部參數有著重要的意義。
2020-03-21 11:58:0522 這種情況的標定過程實際上和相機和機械手分離的標定方法是一樣的,因為相機拍照時,機械手會運動到相機標定的時候的位置,然后相機拍照,得到目標的坐標,再控制機械手,所以簡單的相機固定在末端的手眼系統很多都是采用這種方法,標定的過程和手眼分離系統的標定是可以相同對待的。
2020-07-11 09:57:506948 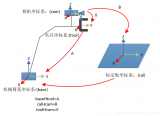
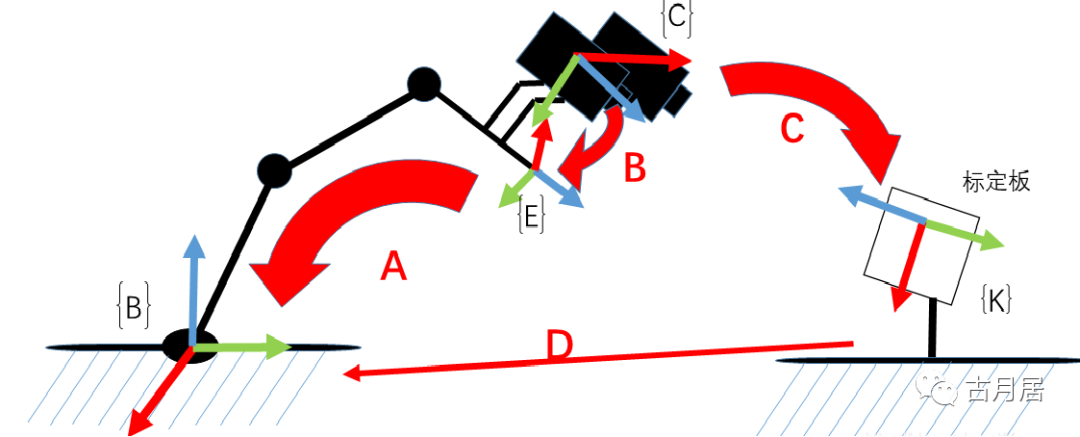
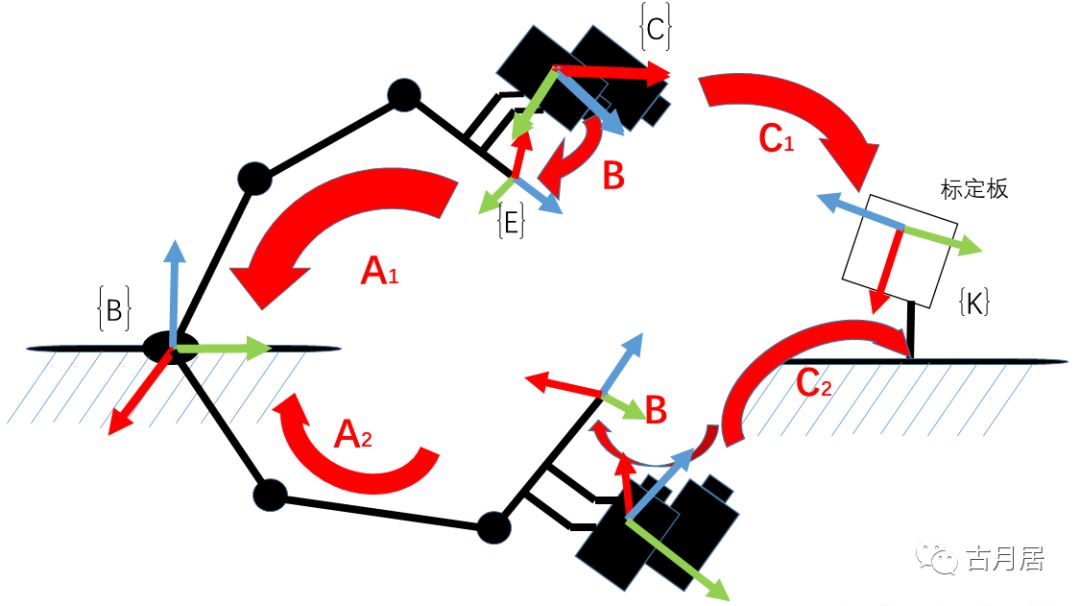
在實際控制中,相機檢測到目標在圖像中的像素位置后,通過標定好的坐標轉換矩陣將相機的像素坐標變換到機械手的空間坐標系中,然后根據機械手坐標系計算出各個電機該如何運動,從而控制機械手到達指定位置。這個過程中涉及到了圖像標定,圖像處理,運動學正逆解,手眼標定等。
2020-08-28 11:42:4612629 
采用張正友提出的基于2D平面棋盤格的攝像機標定方法,利用Matlab攝像頭標定工具完成相機參數的標定。
2020-08-31 10:04:125849 
轉自:微信公眾號AI圖像 創建標定數據模型 你可以用算子create_calib_data創建一個標定數據模型,指定相機和標定物體的數量。當用一個相機的時候,你也用一個單獨的標定物體。 然后,你要做
2020-10-31 11:31:385419 
張正友相機標定法是張正友教授1998年提出的單平面棋盤格的相機標定方法。傳統標定法的標定板是需要三維的,需要非常精確,這很難制作,而張正友教授提出的方法介于傳統標定法和自標定法之間,但克服了傳統標定
2020-12-31 10:06:197407 
岀了一種加權相機標定的方法,其權重考慮了控制點的模糊量信息。首先對棋盤格標定物上的每一個角點進行散焦模糊量估計,在標定過程中,將散焦模糊量的大小作為一個權重加人到標定能量函數最小化過程中,使得標定精度得到
2021-04-21 15:05:5716 機械坐標,相機也得到9個像素坐標,然后標定3.計算機器人的旋轉中心機器人抓取工件分別旋轉三個角度擺放到相機視野內,相機可以得到三個坐標值,通過三個坐標值擬合圓獲得圓心坐標即為旋轉中心4.相機通過公式計算得出最終的輸出結果(rx0,
2021-05-27 14:15:534610 
范圍內隨機生成參數作為初始值,然后以最小平均誤差為準則,利用灰狼粒子群優化混合算法,建立目標函數,進一步求解相機的內外參數。研究結果表明,該算法求解結果準確、穩定,可重復操作,可以有效地提髙標定精度,結果好于
2021-05-31 11:09:515 在大多數條件下,這些參數必須通過實驗與計算才能得到。無論是在圖像測量或者機器視覺應用中,相機參數的標定都是非常關鍵的環節,其標定結果的精度及算法的穩定性直接影響相機工作產生結果的準確性。
2022-06-21 11:12:349143 在實際控制中,相機檢測到目標在圖像中的像素位置后,通過標定好的坐標轉換矩陣將相機的像素坐標變換到機械手的空間坐標系中,然后根據機械手坐標系計算出各個電機該如何運動,從而控制機械手到達指定位置。這個過程中涉及到了圖像標定,圖像處理,運動學正逆解,手眼標定等。
2022-08-18 15:54:378620 文章提出一種基于單應性變換原理的交通監測毫米波雷達與攝像頭標定方法,該方法只需提取交通監測場景中目標在兩傳感器中對應的坐標點對就能解算出傳感器間的轉換關系。相比傳統方法對攝像頭內參數、傳感器自身以及傳感器
2022-10-27 14:15:113632 因為相機成像的模型比較復雜,所以依賴于一張圖像來標定相機是不可靠的。但是我們可以把世界坐標固定在標定板上,通過轉動和平移標定板來得到多幅不同的圖像。
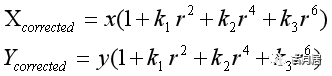
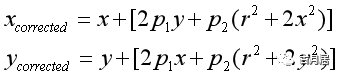
2022-11-22 10:34:056839 相機標定可以歸納為P?n?P(Perspective-n-Point)的問題,即已知三維物點坐標和對應的二維投影坐標,求解相機參數。由于鏡頭的畸變(徑向和切向)帶來非線性成像模型,一般求解方法分為兩步:
2022-12-21 09:52:302249 在這里我們所說的雙目標定是狹義的,講解理論的時候僅指兩臺相機之間相互位置的標定,在代碼實踐的時候,我們才說完整的雙目標定。
2022-12-28 17:17:243623 此方法采用相機和被測物之間的相對運動來統一相機的坐標,相機和被測物只要一方運動即可,記錄各個位置的坐標,然后通過數學運算來統一坐標。通常情況下是相機位置固定,被測物通過機械手等運動裝置進行移動,然后把相機坐標系統一到機械手等運動裝置的原點。
2023-02-03 15:41:543460 世界坐標系,相機坐標系,圖像物理坐標系,像素坐標系之間的關系。
2023-03-08 16:44:005371 此方法采用一塊大標定板來統一各個相機的坐標,每個大標定板中有若干小標定板,各個小標定板間的位置關系都是已知的,各個相機都能拍攝到一個小標定板。通過各個小標定板可以標定每個相機的內部參數和外部參數,每個相機的坐標都可以轉換到各個小標定板的坐標系上,從而統一各個相機的坐標。
2023-03-13 10:06:373157 為了簡化自然坐標系下三相 PMSM 的數學模型,PMSM控制算法中采用的坐標變換通常包括靜止坐標變換( Clark 變換)
和同步旋轉坐標變換( Park變換) 。各坐標系如下圖所示,其中,ABC
2023-03-15 10:47:371 相機模型描述了從三維世界坐標中的點到其在二維圖像平面上投影的成像過程。其中,不同的相機和傳感器系統對應不同類型的參數模型。在本綜述中,我們首先回顧了標準的針孔相機模型涉及的內外相機參數以及幾何表征。
2023-05-11 16:33:281402 
相機模型描述了從三維世界坐標中的點到其在二維圖像平面上投影的成像過程。其中,不同的相機和傳感器系統對應不同類型的參數模型。
2023-05-12 10:22:16604 
相機標定是通過輸入帶有標定patter的標定板來獲得相機參數的一個過程。實際的光學成像是一套非常復雜的過程,從三維世界投影到相機中的二維圖像。相機標定就是用抽象的數學模型來表示這個復雜的成像過程。
2023-06-01 14:36:461342 
obj_points、img_points_left和img_points_right分別是存儲每個標定圖片對應的物理坐標系下的角點坐標、左相機的像素坐標和右相機的像素坐標。這些變量同樣在后續的相機標定和立體匹配中用到。
2023-06-08 16:28:533777 
相機標定是計算機視覺最基礎也是至關重要的一個問題,標定的精度夠不夠決定了以后的校正、去畸變、配準、計算三維坐標、恢復三維模型能否進一步做下去。
2023-06-26 09:51:301030 通過Clarke變換后所得到的α、β靜止坐標系上的分量,我們要注意現在得到的還是正弦信號,既不是階躍信號,也不是斜坡信號。
2023-06-30 17:43:021635 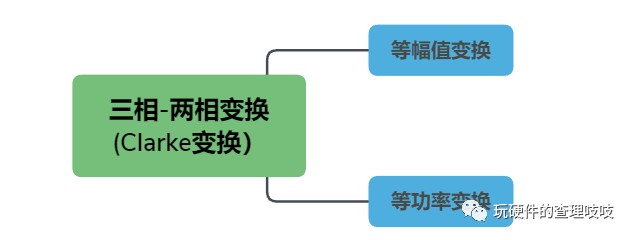
相機的成像過程涉及到四個坐標系:世界坐標系、相機坐標系、圖像坐標系、像素坐標系。這篇博客介紹相機的成像過程,以及四個坐標系之間的裝換關系。
2023-07-03 10:30:1115237 
首先,課程介紹了雙目相機標定的基礎知識。我了解到雙目相機是由兩個相機組成的系統,通過同時拍攝目標物體的兩個視角來獲取三維信息。
2023-07-03 14:25:064396 
在實際控制中,相機檢測到目標在圖像中的像素位置后,通過標定好的坐標轉換矩陣將相機的像素坐標變換到機械手的空間坐標系中,然后根據機械手坐標系計算出各個電機該如何運動,從而控制機械手到達指定位置。這個過程中涉及到了圖像標定,圖像處理,運動學正逆解,手眼標定等。
2023-07-03 15:45:155190 
磁場定向控制中使用到的坐標變換主要有Clark變換、Park變換、Anti-Park變換。
2023-07-07 15:41:428797 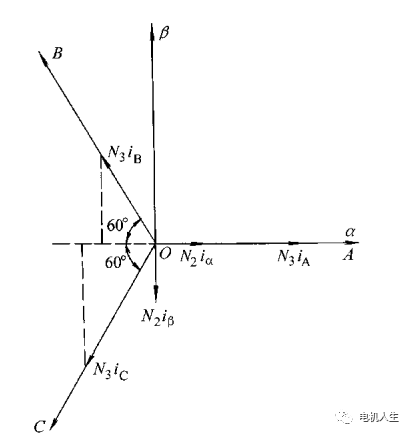
在大多數條件下,這些參數必須通過實驗與計算才能得到。無論是在圖像測量或者機器視覺應用中,相機參數的標定都是非常關鍵的環節,其標定結果的精度及算法的穩定性直接影響相機工作產生結果的準確性。
2023-08-03 09:38:043496 
張正友標定方法是一種經典的相機標定方法,目前是最受歡迎的方法之一。該方法通過一種機器學習的方法,利用大量匹配的數據點像素坐標、世界坐標,基于極大似然估計擬合得到一個最優解。
2023-08-03 10:59:121974 
常見的機器人視覺伺服中要實現像素坐標與實際坐標的轉換,首先就要進行標定,對于實現視覺伺服控制,這里的標定不僅包括攝像機標定,也包括機器人系統的手眼標定。
2023-08-04 11:48:471329 
對于攝像機標定問題已提出了很多方法,攝像機標定的理論問題已得到較好的解決,對攝像機標定的研究來說,當前的研究工作應該集中在如何針對具體的實際應用問題,采用特定的簡便、實用、快速、準確的標定方法。
2023-08-04 12:54:174112 
選中Export Camera Parameters按鈕,將計算得到的相關參數導入到Matlab中;若要進行更精確的標定,可在標定時考慮畸變誤差或采用雙目相機標定方法。
2023-10-09 10:51:504298 
這個逼近的過程就是「相機標定」,我們用簡單的數學模型來表達復雜的成像過程,并且求出成像的反過程。標定之后的相機,可以進行三維場景的重建,即深度的感知,這是計算機視覺的一大分支。
2023-10-18 17:00:071636 
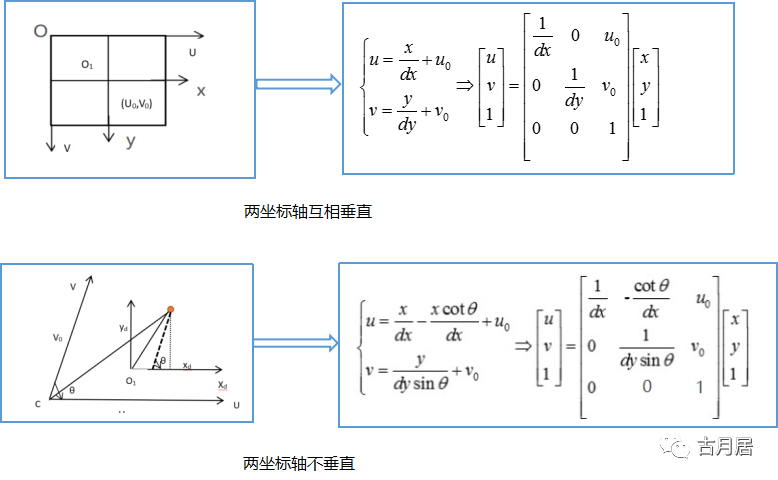
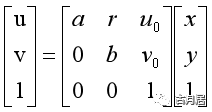
視覺系統一共有四個坐標系:像素平面坐標系(u,v)、圖像坐標系(x,y)、相機坐標系()和世界坐標系()。每種坐標系之間均存在聯系,那么如何通過圖像像素坐標定位到世界坐標系的坐標,需要通過相機標定來解決,其中關鍵的算法部分在于坐標系轉換,而變換則需要通過齊次坐標的表示方式來完成。
2023-10-30 10:24:322082 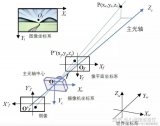
其中r是毫米像素比、(mm/pixel)就是一個毫米有幾個像素,theta為兩個坐標系之間的夾角,(x0,y0)為圖像坐標原點到機械坐標原點的距離。
2023-11-12 09:42:182920 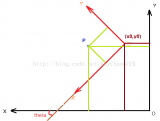
自動駕駛的關鍵挑戰之一是準確感知和解釋車輛周圍環境的能力。這需要使用各種傳感器,如相機、激光雷達和雷達,來捕捉周圍環境的數據。 然而,這些傳感器捕獲的數據通常位于與車輛自身坐標系不同的坐標系中。這
2023-11-14 11:49:411462 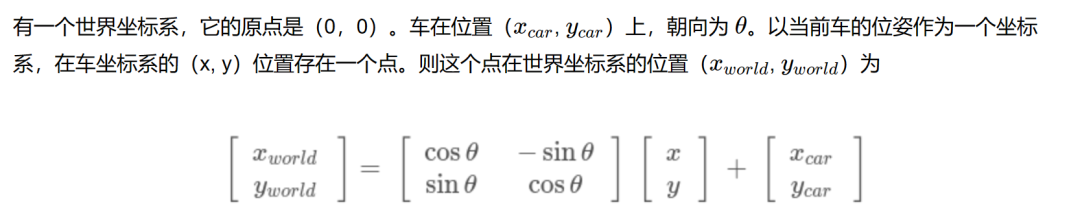
在選擇標定板時,一個重要的考慮因素是它的物理尺寸。這最終關系到最終應用的測量視場(FOV)。這是因為相機需要聚焦在特定的距離上標定。改變焦距長度會輕微地影響對焦距離,這會影響之前的標定。即使是光圈的改變通常也會對標定的有效性產生負面影響,這就是為什么要避免改動它們。
2023-11-25 14:36:082092 
相機知道的是像素坐標,機械手是空間坐標系,所以手眼標定就是得到像素坐標系和空間機械手坐標系的坐標轉化關系。
2024-03-18 09:44:151903 
電力電子中的坐標變換詳解 clark變換&park變換
2025-02-17 15:28:181 1.文件運行 導入工程 雙擊運行桌面GraniStudio.exe。 通過引導界面導入相機標定例程,點擊導入按鈕。 打開相機標定例程所在路徑,選中相機標定.gsp文件,點擊打開,完成導入。 2.功能
2025-08-22 17:38:25836 
 電子發燒友App
電子發燒友App










 工商網監
工商網監
評論