伺服電機的運行需要一個參考點,這個參考點就是原點。原點通常是由光電開關或機械開關來確定的,其位置是固定的。當伺服電機運行時,控制器會根據原點的位置來計算電機的位置。如果沒有原點,控制器就無法確定電機的位置,從而無法精確地控制機器的運動。
2025-07-26 09:43:40 3021
3021 
使用伺服電機在機器人技術中很常見,以實現精確控制。在這里,在本教程中,我們將向您展示如何通過藍牙連接將伺服電機與Arduino UNO和Android設備無線使用。我們已經使用 Arduino 控制了伺服,這次我們使用 Arduino 和藍牙控制伺服電機。
2022-11-16 16:19:574512 
在工業自動化領域,穩定高效的設備間通信是核心。CANopen協議憑借其可靠性,成為眾多工業設備(如伺服電機)的首選通信標準。今天,我們就來展示如何利用RT-Thread睿擎工業開發平臺,快速構建一個
2025-07-19 09:04:515772 
1200PLC控制伺服電機沒有原點傳感器可以回零嗎?
2023-03-30 16:40:53
如何用伺服電機控制四個蝸桿同時上下運動,需要多少個電機
2018-05-12 01:01:56
伺服電機的應用領域有哪些?伺服電機有哪些控制模式?
2021-09-27 06:21:31
伺服電機的原理是什么?伺服電機的調試方法是什么?
2021-09-29 07:47:13
伺服電機按照電流可分為哪幾類?伺服電機的調試方法有哪些?
2021-09-23 06:29:52
一、電機編碼器調零是什么意思伺服電機的編碼器在使用時通常會有調零操作,很多朋友都不知道調零是什么意思,下面為大家簡單介紹一下:伺服電機的控制原理是采用矢量控制方式來控制和驅動的,因此將編碼器在電機
2023-03-09 18:19:55
用的是直流電機,回零方式設的是硬限位回零方式,為什么上位機接收不到回零完成信號,有知道怎么解決的嗎,急求。
2018-04-25 13:42:29
文章目錄01 步科伺服基本說明02 CANopen之SDO使用03 CANopen之PDO使用01 步科伺服基本說明波特率設置:幫助:CAN波特率CAN波特率設置100:1M 50:500k 25
2021-06-28 06:03:13
PLC是如何控制伺服電機:通過發送的脈沖
2021-02-04 06:04:22
的工具軟件或設備進行測試,確保Profinet設備和CanOpen設備之間的數據傳輸正常。配置和控制伺服驅動器。使用伺服驅動器的控制面板或編程軟件來配置和控制伺服系統。可以設置位置、速度和電流等參數,并
2024-01-10 10:29:22
通過labview控制伺服電機,我現在有伺服電機和驅動器,NI的采集卡,電腦,他們是如何連接的?還需要什么東西嗎
2016-09-22 20:34:31
本發明涉及機械控制技術領域,尤其涉及一種伺服電機的控制方法。背景技術:隨著機械控制領域的高速發展,對于伺服電機的需要也日益增加,因此對于伺服 電機的控制已引起越來越多人的重視。目前傳統的伺服電機
2021-09-03 08:53:04
以后,伺服電機運行到某個位置,這時候這兩個編碼器應該有讀數A2和B2,
那么當我在PLC執行回零功能時,伺服電機是根據什么能夠迅速的回零呢?
2023-12-11 07:33:28
進行調試。下面是調試伺服電機的具體步驟: 1、初始化參數在接線之前,先初始化參數。在控制卡上:選好控制方式;將PID參數清零;讓控制卡上電時默認使能信號關閉;將此狀態保存,確保控制卡再次上電時即為
2015-12-29 11:12:23
伺服電機控制方式有脈沖、模擬量和通訊這三種,在不同的應用場景下,我們該如何選擇伺服電機的控制方式呢?
2021-01-22 07:46:05
伺服驅動器和伺服電機的接線方法是什么?伺服驅動器如何進行參數配置?如何通過PLC控制伺服電機的正反轉及定長控制?
2021-09-29 08:38:16
三環控制的原理是什么?影響伺服電機控制的因素是什么?
2021-09-28 06:18:57
步進伺服電機回原點的常用方法是什么?
2021-09-29 07:18:40
但是實找零的方法有很多種,步進伺服電機自身可以完成,上位機配合也可以完成,下面就來介紹下回原點的常見方法有以下幾種。一、步進伺服電機在工作的時候,處于一直轉動的狀態,但當它碰到原點開關的時候,伺服
2021-06-28 08:52:50
求CANOpen轉PROFINET網關連接東元伺服驅動器配置案例
2021-11-15 06:16:56
西門子S7-1200控制伺服/步進電機方法是什么?怎么接線的?
2021-09-29 06:03:32
伺服電機的特點有哪些?伺服電機有哪幾種類型?不同類型伺服電機相應的控制原理是什么?
2021-06-17 10:50:13
請問伺服電機的選型計算方法是什么?
2021-09-28 08:45:32
EtherCAT總線伺服電機/一體化伺服電機如何清零當前位置?
2021-09-27 07:37:37
通過CANopen轉Modbus TCP網關的伺服系統,我們能夠實現CANopen協議與Modbus TCP協議之間的無縫轉換,從而為伺服電機的通訊和控制帶來更大的便利和靈活性。
首先我們可以通過
2024-01-02 16:51:53
總線控制伺服電機的位置、速度、轉矩,大大的降低了EtherCAT/CANopen 總線多軸系統中每一個節點的成本。RDM驅動模塊作為一個EtherCAT/CAN
2023-04-17 18:13:06
RDM協作機器人關節伺服驅動模塊是一款基于FPGA 先進技術開發而成的高性能、直流供電、結構極其緊湊的全數字通用伺服驅動器,最大功率可達 1000W。通過EtherCAT/CANopen 總線控制
2023-04-19 15:39:40
直流伺服電機速度控制原理
直流伺服電機結構示意圖
2010-02-25 17:36:554100 
本文旨在闡述利用PLC控制伺服電機實現準確定位的方法,介紹控制系統在設計與實施中需要認識與解決的若干問題,給出了控制系統參考方案及軟硬件結構的設計思路,對于工業生產中
2011-07-12 11:05:3695782 
PLC控制伺服電機應用實例。
介紹PLC如何控制伺服電機應用的實例。
2016-05-05 11:37:39 68
68 伺服電機的選型計算方法,幫助初次學習者了解伺服電機的選型
2016-05-19 13:41:1918 伺服電機控制PLC程序
2016-12-17 16:18:3710 什么是伺服電機?它們是如何起作用的?(基本駕駛方法和技術)如何選擇伺服電機應用Arduino平臺工作
2017-05-02 15:37:3923 伺服電動機又叫執行電動機,或叫控制電動機。在自動控制系統中,伺服電動機是一個執行元件,它的作用是把信號(控制電壓或相位)變換成機械位移,也就是把接收到的電信號變為電機的一定轉速或角位移。
2017-05-25 10:57:2334978 的CANopen 通信網絡,實現現場總線控制。IS620P 系列伺服驅動器的雙RJ45 端子為CANopen 協議通信端口,及通用產品的CN3 及CN4。
2017-09-27 16:51:4113 基于STM32的伺服電機控制方法研究與設計
2017-09-28 15:52:33237 伺服電機編碼器調零應急方法,簡單而且實用。但必須把電機拆離設備并依靠設備來進行調試。試好后再裝回設備再可。事實上經過大量的調零試驗,每個伺服電機都有一個角度小于10度的零速靜止區域,和350度的高速反轉區域
2017-11-12 10:36:1654635 TRINAMIC公司推出TMCM-1633-CANopen,這是一種新型緊湊型300W BLDC伺服控制器模塊,具有與工業標準CANopen協議兼容的正弦換向功能。
2017-12-01 10:31:2511201 狀態檢測功能,為此,利用CAN總線高層通信協議CANopen,結合陜西省教育廳“并條機自調勻整”項目對伺服電機控制模塊參數的要求,開發了一個具有硬件可重用性、軟件可重配置特點的伺服電機控制模塊。
2019-10-24 07:51:005361 
速度控制一般都是有變頻器實現,用伺服電機做速度控制,一般是用于快速加減速或是速度精準控制的場合,因為相對于變頻器,伺服電機可以在幾毫米內達到幾千轉,由于伺服都是閉環的,速度非常穩定。
2018-12-26 17:33:359069 本文主要闡述了伺服電機編碼器調零對位方法。
2019-11-07 09:29:3990594 步進電機和伺服電機的辨別方法如下:力矩范圍:步進電機系統一般為中小力矩(一般在40Nm以下)范圍;伺服電機系統可實現全范圍。
2020-09-11 10:27:1710007 伺服的結構是怎樣的?一個最簡易的伺服控制單元,就是一個伺服電機加伺服控制器,今天就來解析下伺服電機與伺服控制器。
2020-09-24 10:54:3415281 
所謂開機回零,簡單來說是讓機床的坐標重新回到原點位置,然后從這一參考點來執行后續的任務控制與加工操作。為后續的間隙補償、刀具補償等提供基準點。從檢測裝置和實現的方法來說主要有柵格法回零和磁開關兩種。
2021-04-08 11:13:2829561 
,并具有反應快速特點,通常被應用在自動控制系統中執行元件,伺服電機特點是當信號電壓為零時沒有自轉現象,轉速將隨著轉矩增加而勻速下降。
2021-07-15 14:57:4544744 今天,正運動小助手給大家分享一下運動控制器軸回零的配置與實現。本文主要介紹控制器提供的回零模式,驅動器自身的回零模式我們將在下篇為大家講解。
2022-11-12 14:25:472424 
速度控制一般都是用變頻器實現,用伺服電機做速度控制,一般是用于快速加減速或是速度精準控制的場合,因為相對于變頻器,伺服電機可以在幾毫米內達到幾千轉,由于伺服都是閉環的,速度非常穩定。
2023-01-05 10:38:335439 本教程適用于立邁勝PMM系列CANopen通信一體化伺服電機上位機連接調試。
2023-02-09 10:52:134089 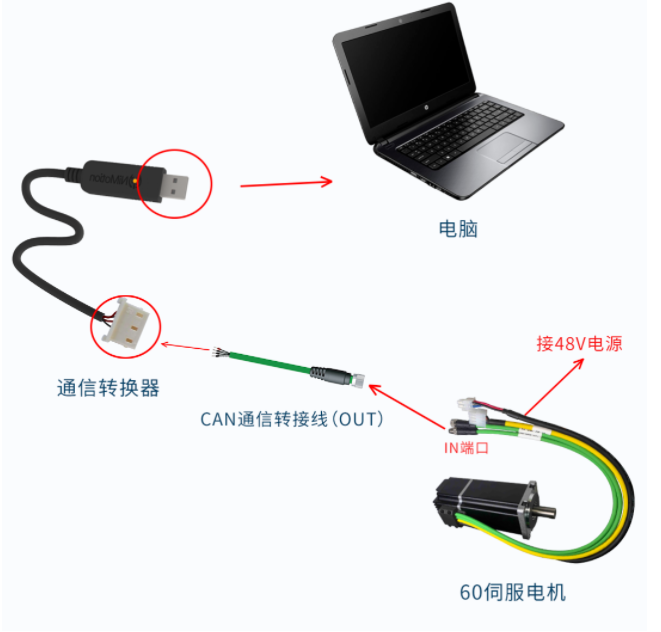
伺服電機的最簡單的控制方法是使用脈沖/方向信號控制。這種方法使用脈沖信號控制電機的位置和方向。具體來說,當接收到一個脈沖信號時,電機會運動一個固定的步長,方向信號則控制電機的運動方向。通過調整脈沖信號的頻率和方向信號的狀態,可以控制伺服電機的速度和位置。
2023-03-01 15:49:064746 
伺服電機是一種可以通過控制器精確地控制位置、速度和加速度的電機。伺服電機通常由電機、編碼器、控制器等部分組成。控制器根據編碼器反饋的位置信息,調節電機的驅動電流,從而控制電機的位置和運動。因此在很多需要高精度運動控制的領域得到了廣泛應用。
2023-03-03 11:17:2712952 伺服電機的零點校準是確保電機運動控制的精度和穩定性的關鍵步驟,通常包括以下步驟:
確認機械結構是否處于零點位置:在進行零點校準之前,需要確認機械結構是否已經正確安裝,并處于正確的零點位置。如果機械結構沒有正確安裝或已經發生了偏移,那么進行零點校準可能會導致電機的控制精度降低。
2023-03-07 14:57:2113232 直流伺服電機的控制方式有多種,下面介紹幾種常見的方式:
位置控制:這種控制方式主要是根據電機的角度或位置進行反饋控制,通過控制電機的轉速和方向來實現位置控制,應用于需要精確位置控制的場合
2023-03-10 13:49:547498 伺服電機是一種能夠精確控制運動的電機,通常包括以下幾種類型:
直流伺服電機:直流伺服電機是利用直流電作為輸入信號,通過控制電流大小和方向來控制電機轉速和轉向的一種電機。直流伺服電機通常具有高速度和高精度的優點,廣泛應用于工業自動化領域。
2023-03-12 10:20:324990 在回答這個問題之前,首先要清楚伺服電機的用途,相對于普通的電機來說,伺服電機主要用于精確定位,因此大家通常所說的伺服控制,其實就是對伺服電機的位置控制。 其實,伺服電機還用另外兩種工作模式,那就是速度控制和轉矩控制,不過應用比較少而已。
2023-04-27 17:34:352497 
伺服電機是一個閉環系統,它使用位置反饋來控制其運動和最終位置。伺服電機有多種類型,其主要特點是能夠精確控制其軸的位置。在工業型伺服電機中,位置反饋傳感器通常是高精度編碼器,而在較小的 RC 或業余
2023-05-06 10:08:212 伺服電機可使控制速度,位置精度非常準確,可以將電壓信號轉化為轉矩和轉速以驅動控制對象。伺服電機轉子轉速受輸入信號控制并能快速反應,在自動控制系統中,用作執行元件,且具有機電時間常數小、線性度高、始動
2023-01-11 17:59:153276 
電子發燒友網站提供《伺服電機定位校準方法教程.zip》資料免費下載
2023-06-28 11:03:461 電子發燒友網站提供《用Arduino控制伺服電機的超級簡單方法.zip》資料免費下載
2023-06-28 09:51:150 伺服電機編碼器一般由伺服電機廠根據設計需要確定零位角度,如果后期維修無法確定先前零位,只好自我找零位,這種找零方法比較麻煩。本文將詳細介紹編碼器中確定零位的方法以及怎樣找零點的過程。
2023-07-26 10:23:0420253 伺服電機因為長期連續不斷使用或者使用者操作不當,會經常發生電機故障,維修又相對復雜的。小編收集了伺服電機發生的13種常見的故障問題的維修方法,供大家學習借鑒。
2023-08-07 11:20:234171 在回答這個問題之前,首先要清楚伺服電機的用途,相對于普通的電機來說,伺服電機主要用于精確定位,因此大家通常所說的控制伺服,其實就是對伺服電機的位置控制。其實,伺服電機還用另外兩種工作模式,那就是速度控制和轉矩控制,不過應用比較少而已。
2023-08-09 09:25:281596 在回答這個問題之前,首先要清楚伺服電機的用途,相對于普通的電機來說,伺服電機主要用于精確定位,因此大家通常所說的控制伺服,其實就是對伺服電機的位置控制。其實,伺服電機還用另外兩種工作模式,那就是速度控制和轉矩控制,不過應用比較少而已。
2023-09-08 11:22:482266 伺服電機用于工業自動化設備的精密控制,控制精度高、響應快,用途十分廣泛,在這里我 向大家介紹采用 Labview 圖形化編程軟件控制伺服電機的方法,采用的測控卡為美國 NI 公 司的多功能卡 PCIe-6341,電機為日本松下的 A5 系列電機。
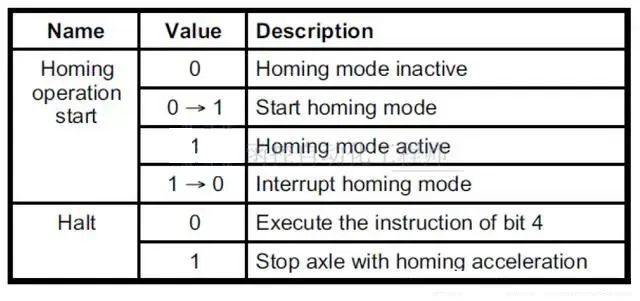
2023-09-11 09:19:3527 通過總線控制伺服電機時,如何進行回零(尋參考點)控制?這里就CANOPEN伺服電機的回零控制方法分享給大家。
2023-10-23 11:42:205451 
要準確地定義伺服電機,我們首先需理解其核心特性:反饋與閉環控制。伺服電機憑借這些特性,能精確控制扭矩、速度或位置,即使在零速度下,也能保持足夠的扭矩以鎖定負載。
2023-11-10 10:46:391768 
PLC(可編程邏輯控制器)是一種常用于工業自動化系統的控制器。伺服電機是一種具有高精度、高速度和高可靠性的電動機,可以用于實現精確控制和準確位置的要求。在PLC中,我們可以使用不同的方法來控制伺服
2023-12-25 11:16:307110 什么是伺服電機的原點設置?伺服電機零點和原點的區別 伺服電機的原點設置,簡單來說,就是確定電機的起始位置或參考位置。在使用伺服電機控制系統時,需要將電機的位置與設定的參考位置進行對齊,以確保精準
2023-12-25 13:57:594441 伺服電機的三種控制方式 如何確定選擇伺服電機控制方式? 伺服電機是一種能夠根據輸入信號實時調整轉速和位置的電動機。它通常用于需要高精度、高效率、高可靠性的工業領域,如機床、機器人、印刷設備等。伺服
2023-12-26 14:02:192675 通過CANopen轉Modbus TCP網關,我們能夠實現CANopen協議與Modbus TCP協議之間的轉換。網關可以配置為CANopen從站和Modbus主站,從而與伺服電機進行通訊和控制
2024-01-02 16:50:23973 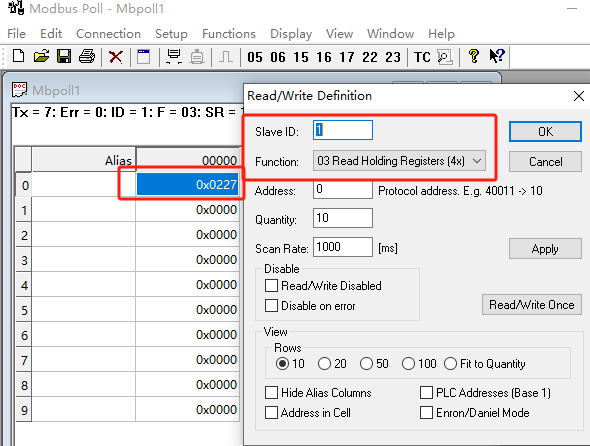
通過CANopen轉Modbus TCP網關,我們能夠實現CANopen協議與Modbus TCP協議之間的轉換。網關可以配置為CANopen從站和Modbus主站,從而與伺服電機進行通訊和控制
2024-01-02 16:55:361053 
伺服電機是一種特殊的電機,可以根據控制信號準確地控制角度、速度和位置。伺服電機的最簡單控制方法可以分為開環控制和閉環控制兩種。 開環控制:開環控制是指通過直接提供控制信號,使伺服電機旋轉到所設
2024-01-14 14:40:273114 零對位方法。 伺服電機編碼器的故障原因: (1) 機械撞擊:長時間運行中,如果電機發生撞擊或外力作用,可能導致編碼器的機械部件損壞。 (2) 環境因素:工作環境的溫度、濕度、腐蝕性氣體等因素也可能導致編碼器部件老化、腐
2024-02-14 18:06:0030699 伺服電機編碼器調零對位是指通過調整編碼器的零位來使得電機的位置精準對位。編碼器是一種能夠將物理量轉換為電信號的裝置,它可以測量電機轉動的角度或位置。 在進行伺服電機編碼器調零對位之前,我們首先要
2024-01-25 11:32:087734 零點位置是通過程序復位控制回零或者在回零過程中感應到原點限位的時候,把當前位置值清零,表示原點或零點,一切位置都是以原點為基礎,確定零點位置的時候,應先確定運動的正向和負向,以及電機的實際運動方向。
2024-03-20 14:07:476648 伺服回零的作用 零點位置是通過程序復位控制回零或者在回零過程中感應到原點限位的時候,把當前位置值清零,表示原點或零點,一切位置都是以原點為基礎,確定零點位置的時候,應先確定運動的正向和負向,以及電機
2024-03-23 08:42:1410826 伺服電機編碼器調零是確保電機精確控制的重要步驟。本文將詳細介紹伺服電機編碼器調零的原理、步驟和注意事項,以幫助用戶更好地理解和操作。 伺服電機編碼器調零的原理 伺服電機編碼器是一種將電機軸的旋轉
2024-06-05 15:41:498662 伺服電機控制器參數調整是確保伺服系統正常運行和達到預期性能的關鍵步驟。本文將詳細介紹伺服電機控制器的參數調整方法,包括基本原理、常見參數、調整步驟和注意事項等。 第一部分:伺服電機控制器參數調整
2024-06-05 15:47:054648 伺服電機是一種高精度、高響應速度的電機,廣泛應用于工業自動化、機器人、航空航天等領域。伺服電機的控制方法有很多種,這里我們將介紹一種最簡單、最基礎的控制方法——開環控制。 開環控制是一種沒有反饋環節
2024-06-05 15:49:202090 伺服電機是一種高精度、高效率的電機,廣泛應用于工業自動化、機器人、精密機械等領域。伺服電機的旋轉方向是其控制的重要參數之一,正確設置旋轉方向可以保證系統的穩定運行和精確控制。本文將詳細介紹伺服電機
2024-06-12 10:11:555718 PLC(可編程邏輯控制器)是一種廣泛應用于工業自動化領域的控制設備。伺服電機作為執行元件,可以通過PLC進行精確控制。以下是關于PLC控制伺服電機的指令的詳細介紹。 概述 PLC控制伺服電機
2024-06-12 11:39:264675 運動控制卡伺服電機控制是現代工業自動化領域中一項重要的技術,它涉及到運動控制卡、伺服電機、控制算法等多個方面。本文將詳細介紹運動控制卡伺服電機的控制原理、控制方法、控制策略以及實際應用等方面的內容
2024-06-12 14:13:222031 伺服電機編碼器調零對位是確保伺服系統精確控制的關鍵步驟之一。本文將詳細介紹伺服電機編碼器調零對位的方法,包括機械對中、電氣對中、軟件對中和自適應對中等,以及各種方法的優缺點和適用場景。 機械對中
2024-06-17 10:54:005325 三菱伺服電機編碼器調零是確保電機精確控制的重要步驟。本文將詳細介紹三菱伺服電機編碼器調零的方法和步驟,包括編碼器的基本原理、調零的目的、調零的方法、調零的步驟、注意事項以及常見問題和解決方案。 一
2024-06-17 14:21:085860 伺服電機矢量控制作為現代電機控制技術的重要分支,廣泛應用于工業自動化、精密加工、機器人技術等領域。其核心思想是通過模擬直流電機的控制原理,實現對交流電機的高效、精確控制。本文將詳細闡述伺服電機矢量控制的原理,包括其理論基礎、控制策略、實現方法以及應用領域等方面。
2024-06-18 17:58:252561 的邏輯控制和數據處理能力,成為工業自動化系統的核心控制單元。本文旨在探討伺服電機與PLC協同控制的實現方法,并結合具體案例進行分析。
2024-06-24 14:30:453171 伺服電機是一種高精度、高響應速度的電機,廣泛應用于工業自動化、機器人、航空航天等領域。伺服電機的控制方式有很多種,其中脈沖控制是一種常見的控制方式。 伺服電機的基本概念 伺服電機是一種將電能轉換
2024-07-14 10:37:312468 其精確控制的關鍵,本文將介紹伺服電機轉速調整的方法。 伺服電機基本原理 2.1 伺服電機的分類 伺服電機按照工作原理可以分為直流伺服電機和交流伺服電機兩大類。直流伺服電機采用直流電源供電,具有結構簡單、控制方便等優
2024-07-14 10:44:473990 電子發燒友網站提供《V90伺服控制器回零.pdf》資料免費下載
2024-09-02 14:31:070 步進電機的伺服控制方法主要包括以下幾種: 1. 位置模式 定義 :在位置模式下,步進伺服電機根據輸入的位置指令,通過閉環控制系統精確控制電機轉子的位置。 工作原理 :控制器會根據位置誤差調整驅動電流
2024-09-04 09:48:041794 伺服電機(Servo Motor)是一種高精度、高性能的電動機系統,廣泛應用于需要精確控制位置、速度和加速度的場合。 一、伺服電機的工作原理 伺服電機是指在伺服系統中控制機械元件運轉的發動機,是一種
2024-10-22 16:58:204136 電氣控制、機械調整和軟件編程三個方面。 一、電氣控制 伺服電機的電氣控制是改變電機方向的主要方法之一。伺服電機通常采用三相交流電供電,通過改變供電相序,可以實現電機的正反轉。具體步驟如下: 1.1 斷開電源:在進行電氣控
2025-02-12 11:07:522644 這篇文章主要介紹了使用EtherCAN轉CANopen網關控制伺服電機的步驟,包括配置軟件、創建新工程、搜索設備、添加主站設備、導入EDS文件、添加從站設備、設置參數、生成和下載。文章最后介紹了在線監控和I/O功能映射的功能。
2025-03-23 17:30:30674 
 電子發燒友App
電子發燒友App












 工商網監
工商網監
評論