運(yùn)動(dòng)控制(MC)是自動(dòng)化的一個(gè)分支,它使用通稱為
伺服機(jī)構(gòu)的一些設(shè)備如液壓泵,線性執(zhí)行機(jī)或者是
電機(jī)來
控制機(jī)器的位置或速度。
運(yùn)動(dòng)控制在機(jī)器人和數(shù)控機(jī)床的領(lǐng)域內(nèi)的應(yīng)用要比在專用機(jī)器中的應(yīng)用更復(fù)雜,因?yàn)楹笳?/div>
2016-05-07 19:22:19
`TC6012、TC6013、TC6014分別是一顆2軸、3軸、4軸運(yùn)動(dòng)控制IC。分別能夠?qū)?個(gè)軸、3個(gè)軸、4個(gè)軸的步進(jìn)驅(qū)動(dòng)器或者脈沖型的伺服電機(jī)驅(qū)動(dòng)器進(jìn)行位置、速度和插補(bǔ)進(jìn)行控制。所有的芯片功能
2018-08-28 11:00:36
NPMC/PPCI系列板級(jí)運(yùn)動(dòng)控制器為多軸數(shù)字伺服電機(jī)控制器。4軸PC/104總線(NPMC6045A-4104)和4軸PCI-總線(PPCI7443)的板有供貨。一般特點(diǎn)有高脈沖速率
2022-01-06 11:37:58
運(yùn)動(dòng)控制卡是什么?運(yùn)動(dòng)控制卡有何功能?伺服驅(qū)動(dòng)器是什么?伺服驅(qū)動(dòng)器有哪幾種控制方式?
2021-10-09 08:17:42
運(yùn)動(dòng)控制器控制伺服電機(jī)的指令方式運(yùn)動(dòng)控制器以模擬量信號(hào)控制伺服電機(jī)的調(diào)試步驟
2021-01-21 07:15:51
作者:何國(guó)軍 陳維榮 劉小強(qiáng) 孫叢君運(yùn)動(dòng)控制技術(shù)是數(shù)控機(jī)床的關(guān)鍵技術(shù),其技術(shù)水平的高低將直接影響一個(gè)國(guó)家裝備制造業(yè)的發(fā)展水平。目前,多軸伺服控制器越來越多地運(yùn)用在運(yùn)動(dòng)控制系統(tǒng)中,具有較高的集成度
2019-07-31 08:15:26
運(yùn)動(dòng)控制基礎(chǔ)-電機(jī)基礎(chǔ)運(yùn)動(dòng)控制基礎(chǔ)-電機(jī)基礎(chǔ)使用智能伺服,我們通常不需要了解電機(jī)的具體細(xì)節(jié),通過簡(jiǎn)單地發(fā)送指令給智能伺服,它就可以實(shí)現(xiàn)我們需要的運(yùn)動(dòng)。但是,如果你在使用智能伺服時(shí),希望能夠達(dá)到最佳
2018-05-16 10:31:44
運(yùn)動(dòng)控制系列:運(yùn)動(dòng)軸點(diǎn)動(dòng)控制【控制要求】觸摸屏上增加左右箭頭用來控制軸1點(diǎn)動(dòng),按住向左的箭頭電機(jī)轉(zhuǎn),松手就停。觸摸屏界面: 觸摸屏上添加位按鈕 點(diǎn)動(dòng)進(jìn)M1: Modbus地址 0x1001 點(diǎn)動(dòng)退
2019-07-18 14:46:31
怎么用CompactRIO 9514來控制伺服電機(jī)的往返運(yùn)動(dòng),大哥們幫幫忙!
2020-07-29 17:18:41
各位前輩好,我現(xiàn)在想用LabVIEW和研華運(yùn)動(dòng)控制卡來做4軸運(yùn)動(dòng)控制,在網(wǎng)上和淘寶上查了很多資料,都沒有找到LabVIEW運(yùn)動(dòng)控制方面的詳細(xì)資料。希望有精通LV搭載運(yùn)動(dòng)控制卡經(jīng)驗(yàn)的前輩幫忙指點(diǎn)下,收費(fèi)也可以。感激不盡
2019-10-16 08:48:57
各位大蝦:我現(xiàn)在相了解LabVIEW如何能控制單軸伺服電機(jī),比如需要哪些東西,誰控制誰?通過什么實(shí)現(xiàn)正反轉(zhuǎn)和轉(zhuǎn)速的控制?希望大神幫助
2015-03-04 16:47:57
有誰大神用過8軸的NI運(yùn)動(dòng)控制器與松下伺服電機(jī)的嗎,如何接線的,急求教,非常感謝!!!
2017-01-16 21:03:28
哪位大神有l(wèi)aBVIEW 控制伺服電機(jī)的程序,借來參考一下!由于工作中設(shè)計(jì)了一個(gè)探頭,想要探頭來回移動(dòng),因此涉及到用laBVIEW 控制伺服電機(jī)運(yùn)動(dòng),并且返回位置信息,然而我在這方面是個(gè)門外漢,乞求哪位大神幫幫忙!謝謝!
2018-03-19 20:14:57
用laBVIEW簡(jiǎn)單控制伺服電機(jī)正/反轉(zhuǎn),并讀取轉(zhuǎn)動(dòng)圈數(shù),硬件需求中必須要運(yùn)動(dòng)控制卡嗎?或者要用到什么類型的運(yùn)動(dòng)控制卡。轉(zhuǎn)動(dòng)速度在0.5-1圈/秒。
2018-03-12 09:49:13
labview控制雙軸步進(jìn)電機(jī)按照輸出的正弦余弦波形運(yùn)動(dòng)
2020-01-04 11:24:57
`不知道有沒有大神玩過,用labview控制雷賽的運(yùn)動(dòng)控制卡,進(jìn)而控制伺服電機(jī)。前幾天用的好好的,不知道從什么時(shí)候開始,labview無法控制了。而這個(gè)運(yùn)動(dòng)控制卡自帶的例程(應(yīng)該是用C語(yǔ)言寫的),還能正常控制。請(qǐng)問問題可能出在什么地方??`
2017-03-02 10:15:36
各位大俠,求助呀~運(yùn)動(dòng)控制卡采用的是ni公司PCI-7350,用labview編寫運(yùn)動(dòng)控制系統(tǒng)。以前沒有編寫過大型的系統(tǒng),沒什么經(jīng)驗(yàn),大俠們有沒有相關(guān)的資料,特別是編寫的相關(guān)的例子。單軸,雙軸,三軸的就行了~~~求救呀~~~{:4:}
2013-03-12 16:07:11
各位好,請(qǐng)問我想用NI的運(yùn)動(dòng)控制板卡控制兩臺(tái)伺服驅(qū)動(dòng)器,采用最簡(jiǎn)單的脈沖控制方式。NI的板卡選用PCI7390,不知是否合適,如不合適,還請(qǐng)各位指出更合適的控制器,謝謝!
2018-01-11 09:57:37
系統(tǒng)通過使用IP65 級(jí)配電箱,進(jìn)一步增強(qiáng)了無外殼運(yùn)動(dòng)控制架構(gòu)。這支持需要在模塊化機(jī)器設(shè)計(jì)中,運(yùn)行多個(gè)運(yùn)動(dòng)軸的應(yīng)用。單電纜連接其余的控制柜和配電箱,配電箱連接多個(gè)帶集成驅(qū)動(dòng)器的伺服電機(jī)以及附加配電箱(如果
2023-03-03 16:04:20
本帖最后由 eehome 于 2013-1-5 10:06 編輯
六軸運(yùn)動(dòng)控制卡是基于PCI總線的高性能六軸伺服/步進(jìn)控制卡,一個(gè)系統(tǒng)中可支持多達(dá)16塊控制卡,可控制96路伺服/步進(jìn)電機(jī),支持
2012-12-24 15:25:13
各位大神,本人剛算入門labview,最近在做一個(gè)項(xiàng)目,關(guān)于labview搭配研為運(yùn)動(dòng)控制卡控制伺服電機(jī),不知道要用什么模塊、控制方式、如何利用通訊協(xié)議?請(qǐng)問各位大神可以指導(dǎo)下嗎?
2016-01-11 16:00:52
請(qǐng)問各位大神,我做實(shí)驗(yàn)使用的是雷塞DMC2210的運(yùn)動(dòng)控制卡,來控制松下A5系列的伺服電機(jī)。之前做實(shí)驗(yàn)轉(zhuǎn)速一直都是好好的,現(xiàn)在卻經(jīng)常出現(xiàn)轉(zhuǎn)速控制不了的問題:就是無論我面板上輸入多大轉(zhuǎn)速,電機(jī)始終是
2016-05-28 15:14:57
本帖最后由 w75815895 于 2020-8-26 14:10 編輯
xc1004四軸SPI運(yùn)動(dòng)控制芯片與單片機(jī)控制4軸步進(jìn)伺服電機(jī)資料代碼電路
2017-03-13 10:20:45
次數(shù),從而直接影響到銑削過程效率。每次操作都選擇最佳運(yùn)動(dòng)方案,以及盡量縮短刀具更換時(shí)間,同樣可以提高生產(chǎn)率和能效。生產(chǎn)質(zhì)量取決于絲杠的精度和電機(jī)驅(qū)動(dòng)軸位置與速度控制。最新銑床有五個(gè)或更多的控制軸,支持以
2018-10-10 18:13:01
次數(shù),從而直接影響到銑削過程效率。每次操作都選擇最佳運(yùn)動(dòng)方案,以及盡量縮短刀具更換時(shí)間,同樣可以提高生產(chǎn)率和能效。生產(chǎn)質(zhì)量取決于絲杠的精度和電機(jī)驅(qū)動(dòng)軸位置與速度控制。最新銑床有五個(gè)或更多的控制軸,支持以
2018-10-22 16:50:51
`基于TLP521的四軸運(yùn)動(dòng)控制卡標(biāo)簽:DMC1410,運(yùn)動(dòng)控制卡類別:步進(jìn)電機(jī)方案描述:DMC1410運(yùn)動(dòng)控制卡是一款價(jià)格便宜、編程簡(jiǎn)易的PCI總線4軸運(yùn)動(dòng)控制卡,最多可控制4軸步進(jìn)電機(jī)或伺服電機(jī)
2013-06-21 16:25:35
mpc003,mpc004,mpc006,mpc004s運(yùn)動(dòng)控制芯片模塊DIP-30封裝,可與普通單片機(jī)通過串口連接對(duì)步進(jìn)電機(jī)或伺服電機(jī)進(jìn)行控制。單模塊最高六軸輸出,最高脈沖輸出頻率為2MHz,最高
2016-08-30 14:06:34
多軸伺服控制同步精密運(yùn)動(dòng) 精密加工是一個(gè)多步驟過程,先是粗略切削,然后經(jīng)過多道精細(xì)切削才能達(dá)到要求。多個(gè)電機(jī)驅(qū)動(dòng)進(jìn)給主軸和多個(gè)絲杠來定位工具頭。電機(jī)位置與速度伺服驅(qū)動(dòng)器的功率和剛度決定了支持特定表面
2016-01-25 16:48:48
其他版塊不熟悉,還是在labview版塊發(fā)帖。最近在弄一個(gè)多軸伺服系統(tǒng)。目前只控兩軸。PLC控制伺服電機(jī)。需求是在一個(gè)運(yùn)動(dòng)周期內(nèi),兩軸的運(yùn)動(dòng)位移不同,但是要求同時(shí)啟動(dòng)、同時(shí)到達(dá)(因?yàn)橐?b class="flag-6" style="color: red">控制軌跡
2017-09-11 11:41:18
的邏輯處理和控制算法,能實(shí)現(xiàn)多軸高速高精度的伺服控制。利用DSP與FPGA設(shè)計(jì)運(yùn)動(dòng)控制器,其中DSP用于運(yùn)動(dòng)軌跡規(guī)劃、速度控制及位置控制等功能;FPGA完成運(yùn)動(dòng)控制器的精插補(bǔ)功能,用于精確計(jì)算步進(jìn)電機(jī)或伺服驅(qū)動(dòng)元件的控制脈沖,同時(shí)接收并處理脈沖型位置反饋信號(hào)。那么,我們具體該怎么做呢?
2019-08-06 06:27:00
在多軸伺服控制系統(tǒng)中實(shí)現(xiàn)同步精密運(yùn)動(dòng)
2021-01-27 07:45:40
我需要通過LabVIEW控制伺服電機(jī),伺服電機(jī)通過滾珠絲杠控制滑塊運(yùn)動(dòng),如何設(shè)計(jì)讓滑塊正向運(yùn)動(dòng)到某一接近開關(guān)后反向運(yùn)行?接近開關(guān)反饋的布爾值如何通過LabVIEW程序識(shí)別給電機(jī)?求高人給予指點(diǎn)
2013-11-27 16:26:21
怎樣去設(shè)計(jì)三軸伺服控制器?如何對(duì)三軸伺服控制器的性能進(jìn)行測(cè)試?
2021-04-28 06:04:11
有哪位做過Labview控制三軸伺服電機(jī)的案子,本人剛接手,希望大家分享資料和經(jīng)驗(yàn),非常感謝。
2016-07-07 10:20:04
系統(tǒng)用ARM+FPGA實(shí)現(xiàn),控制步進(jìn)或伺服電機(jī)運(yùn)動(dòng),ARM型號(hào)?+FPGA型號(hào)? 集成芯片? 請(qǐng)教大神給個(gè)方案!!!
2015-11-18 10:30:29
Elmo公司的 Gold Maestro 是先進(jìn)的網(wǎng)絡(luò)多軸運(yùn)動(dòng)控制器。Gold Maestro 控制任何多軸場(chǎng)景,無論是簡(jiǎn)單的點(diǎn)對(duì)點(diǎn)運(yùn)動(dòng),還是完整的多軸協(xié)調(diào)或同步運(yùn)動(dòng)。Gold Maestro 依托
2022-01-13 11:49:52
基于Motionchip的直流無刷伺服電機(jī)運(yùn)動(dòng)控制系統(tǒng)設(shè)計(jì)和運(yùn)用
在傳統(tǒng)的電機(jī)伺服控制裝置中,一般采用一個(gè)或多個(gè)單片機(jī)作為伺服控制的核心處理器。由于這種伺服控制
2010-02-22 11:00:30 1043
1043 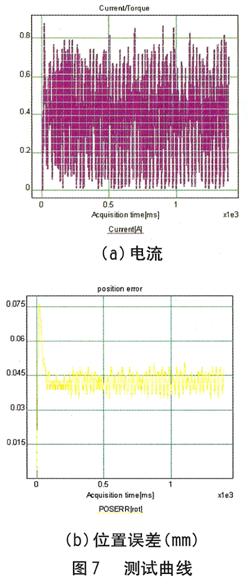
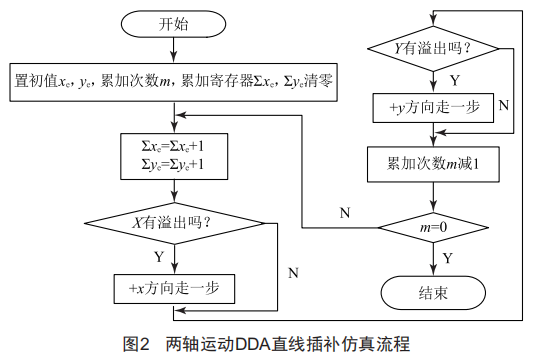
介紹了建筑物整體平移中的 電機(jī)同步 運(yùn)動(dòng)問題,并以運(yùn)動(dòng)控制器GT2002SV為實(shí)驗(yàn)基礎(chǔ),闡述系統(tǒng)的硬件組成和兩軸直線運(yùn)動(dòng)中同步控制的改進(jìn)算法的基本思路和實(shí)現(xiàn). 最后對(duì)實(shí)驗(yàn)數(shù)據(jù)和結(jié)果
2011-08-15 16:22:54 100
100 本文介紹使用MODBUS現(xiàn)場(chǎng)總線與伺服控制技術(shù)統(tǒng)一,實(shí)現(xiàn)設(shè)備遠(yuǎn)程監(jiān)控、電機(jī)運(yùn)動(dòng)控制配置與實(shí)現(xiàn)方案的方法。
2012-12-10 11:26:5212093 
數(shù)控沖床x軸高速伺服運(yùn)動(dòng)加減速控制算法研究
2016-05-03 09:38:5411 PLC控制伺服電機(jī)應(yīng)用實(shí)例。
介紹PLC如何控制伺服電機(jī)應(yīng)用的實(shí)例。
2016-05-05 11:37:3968 四軸電機(jī)伺服控制ASIC芯片_劉亞靜
2017-01-07 15:17:124 設(shè)計(jì)了一種基于DSP 和FPGA 的四軸伺服電機(jī)運(yùn)動(dòng)控制器,該控制器選用DSP 與FPGA 作為核心部件。針對(duì)運(yùn)動(dòng)控制中的一些具體問題,如高速、高精度、實(shí)時(shí)控制等,規(guī)劃了DSP 的功能擴(kuò)展,在
2017-09-21 11:24:5210 CPAC 控制器按照主機(jī)發(fā)送的指令工作。CPAC 控制器指令封裝在動(dòng)態(tài)鏈接庫(kù)中。用戶在編寫應(yīng)用程序時(shí),通過調(diào)用CPAC 控制器中運(yùn)動(dòng)控制庫(kù)GUC-X00-TPX-Addi tion 2.03.lib
2017-10-11 17:11:1315 CPAC 控制器按照主機(jī)發(fā)送的指令工作。CPAC 控制器指令封裝在動(dòng)態(tài)鏈接庫(kù)中。用戶在編寫應(yīng)用程序時(shí),通過調(diào)用CPAC 控制器中運(yùn)動(dòng)控制庫(kù)GUC-X00-TPX-Addi tion 2.03.lib
2017-10-11 17:11:138 mpc02t與單片機(jī)通過spi通訊,集成2軸運(yùn)動(dòng)控制功能,可多片芯片并聯(lián)組成120軸,芯片僅有6條指令,TSSOP20封裝,脈沖頻率1MHZ,可對(duì)步進(jìn)電機(jī)或伺服電機(jī)精確控制。兩軸SPI通訊TSSOP20封裝運(yùn)動(dòng)控制芯片mpc02t的資料內(nèi)含使用說明與C語(yǔ)言程序.
2017-12-07 13:38:0810 多軸步進(jìn)電機(jī)插補(bǔ)控制器及多軸步進(jìn)電機(jī)運(yùn)動(dòng)控制卡控制方法
2018-04-11 10:24:4729 運(yùn)動(dòng)控制器是利用高性能微處理器(如DSP)及大規(guī)模可編程器件實(shí)現(xiàn)多個(gè)伺服電機(jī)的多軸協(xié)調(diào)控制。目前采用運(yùn)動(dòng)控制器的數(shù)控系統(tǒng)已成為新一代數(shù)控技術(shù)發(fā)展潮流,運(yùn)動(dòng)控制器將成為未來數(shù)控系統(tǒng)的核心。
2018-04-24 18:41:572368 伺服電機(jī)最主要的應(yīng)用還是定位控制,位置控制有兩個(gè)物理量需要控制,那就是速度和位置,確切的說,就是控制伺服電機(jī)以多快的速度到達(dá)什么地方,并準(zhǔn)確的停下。
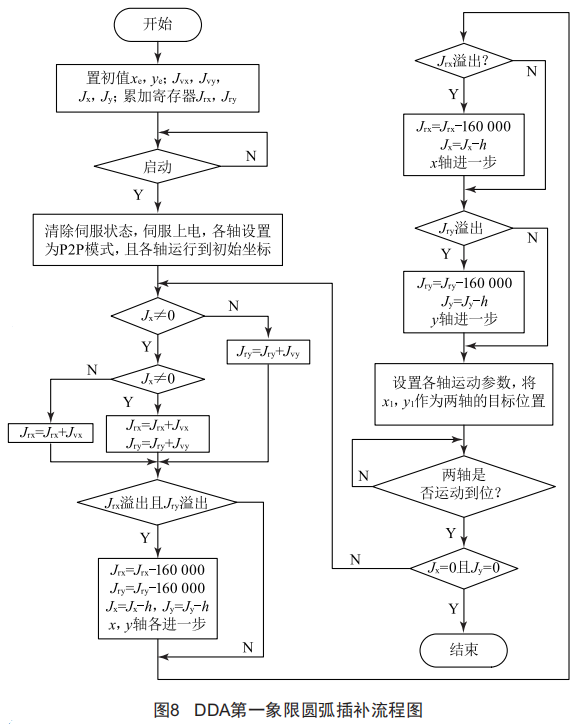
2018-07-23 14:55:003277 PCI9052為PCI橋接口與計(jì)算機(jī)通信,完成了4軸伺服/ 步進(jìn)電機(jī)控制,實(shí)現(xiàn)位置,速度,加速度控制和直線、圓弧插補(bǔ)的功能。
2020-03-18 08:06:004043 
這種方式與步進(jìn)電機(jī)的控制方式類似,運(yùn)動(dòng)控制器給伺服驅(qū)動(dòng)器發(fā)送“脈沖/方向”或“CW/CCW”類型的脈沖指令信號(hào);伺服驅(qū)動(dòng)器工作在位置控制模式,位置閉環(huán)由伺服驅(qū)動(dòng)器完成。日系伺服和國(guó)產(chǎn)伺服產(chǎn)品大都采用這種模式。其優(yōu)點(diǎn)是系統(tǒng)調(diào)試簡(jiǎn)單,不易產(chǎn)生干擾,但缺點(diǎn)是伺服系統(tǒng)響應(yīng)稍慢。
2019-02-17 11:16:2712493 技術(shù)需知伺服電機(jī)調(diào)試的基本步驟, 運(yùn)動(dòng)控制器控制伺服電機(jī)通常采用兩種指令方式: 1、數(shù)字脈沖 這種方式與步進(jìn)電機(jī)的控制方式類似,運(yùn)動(dòng)控制器給伺服驅(qū)動(dòng)器發(fā)送脈沖/方向或CW/CCW類型的脈沖指令信號(hào)
2020-06-12 14:45:486476 如何用一個(gè)PLC控制兩個(gè)或多個(gè)伺服電機(jī)同步運(yùn)行主電機(jī)速度改變時(shí),其它伺服電機(jī)也跟著同步運(yùn)行。用第一個(gè)伺服驅(qū)動(dòng)的輸出控制第二個(gè)伺服驅(qū)動(dòng)器,就可以實(shí)現(xiàn)同步運(yùn)動(dòng)了,只要要求不是太高這種方法完全可行。同步分控制精度來確定控制方案的。
2019-07-18 08:00:0021 伺服電機(jī)的控制模式:1、位置模式,2、速度模式。
2019-10-07 16:48:0018574 CRT-DMC660MF 示教系統(tǒng)簡(jiǎn)易說明1. 系統(tǒng)構(gòu)成1.1 DMC660M 6 軸運(yùn)動(dòng)控制器自主研發(fā)的新型多軸運(yùn)動(dòng)控制系統(tǒng)應(yīng)用平臺(tái);支持標(biāo)準(zhǔn) Modbus 協(xié)議;六軸步進(jìn)電機(jī)、伺服電機(jī)控制;自帶輸
2020-12-26 08:39:351003 、速度和 S 曲線的加減速控制, MCX314AS 的所有功能都是通過特定的寄存器控制的, 通過寄存器對(duì) 4 個(gè)運(yùn)動(dòng)軸進(jìn)行參數(shù)化控制, 實(shí)現(xiàn)任意 3 軸直線插補(bǔ)、任意兩軸圓弧插補(bǔ)、任意 3 軸位元模式插補(bǔ)。
2021-05-19 15:17:1825 的IC。 MCX514是一款既能與8/16位、16位數(shù)據(jù)總線接口也能與I2C串行數(shù)據(jù)總線接口的帶插補(bǔ)功能的4軸運(yùn)動(dòng)控制芯片,它能對(duì)脈沖型伺服電機(jī)、步進(jìn)電機(jī)進(jìn)行各軸獨(dú)立定位或速度控制。 可以選擇4軸中任意
2022-03-24 14:34:0012307 運(yùn)動(dòng)控制是工業(yè)自動(dòng)化系統(tǒng)的子系統(tǒng)。它同步化控制多個(gè)電機(jī)來完成一系列運(yùn)動(dòng)。例如,多軸機(jī)械臂需要多個(gè)電機(jī)無縫地協(xié)同運(yùn)行才能做出特定的動(dòng)作。運(yùn)動(dòng)控制主要用于軌跡規(guī)劃、速度規(guī)劃、插補(bǔ)算法和運(yùn)動(dòng)學(xué)轉(zhuǎn)換。運(yùn)動(dòng)控制系統(tǒng)經(jīng)常出現(xiàn)在印刷、包裝和裝配應(yīng)用中。
2022-07-22 09:52:466297 本方案單芯片實(shí)現(xiàn)HMI與四軸伺服運(yùn)動(dòng)控制,無需總線通信反饋與交互控制,片內(nèi)完成所有數(shù)據(jù)采集、處理和顯示,對(duì)伺服控制和四電機(jī)的同步控制效率大大提高,如下演示視頻為通過UI交互下的四軸伺服電機(jī)運(yùn)動(dòng)。
2022-11-14 14:10:185495 本方案中,X軸、Y軸、Z軸協(xié)同工作,在伺服控制中接入插補(bǔ)算法,完成世界地圖繪制,如下視頻為三軸伺服運(yùn)動(dòng)控制下繪制世界地圖的過程,1分鐘不到繪制一個(gè)基本的世界地圖。
2022-11-24 14:22:122767 伺服電機(jī)的最簡(jiǎn)單的控制方法是使用脈沖/方向信號(hào)控制。這種方法使用脈沖信號(hào)控制電機(jī)的位置和方向。具體來說,當(dāng)接收到一個(gè)脈沖信號(hào)時(shí),電機(jī)會(huì)運(yùn)動(dòng)一個(gè)固定的步長(zhǎng),方向信號(hào)則控制電機(jī)的運(yùn)動(dòng)方向。通過調(diào)整脈沖信號(hào)的頻率和方向信號(hào)的狀態(tài),可以控制伺服電機(jī)的速度和位置。
2023-03-01 15:49:064746 
伺服電機(jī)是一種可以通過控制器精確地控制位置、速度和加速度的電機(jī)。伺服電機(jī)通常由電機(jī)、編碼器、控制器等部分組成。控制器根據(jù)編碼器反饋的位置信息,調(diào)節(jié)電機(jī)的驅(qū)動(dòng)電流,從而控制電機(jī)的位置和運(yùn)動(dòng)。因此在很多需要高精度運(yùn)動(dòng)控制的領(lǐng)域得到了廣泛應(yīng)用。
2023-03-03 11:17:2712952 伺服電機(jī)是一種能夠精確控制運(yùn)動(dòng)的電機(jī),通常包括以下幾種類型:
直流伺服電機(jī):直流伺服電機(jī)是利用直流電作為輸入信號(hào),通過控制電流大小和方向來控制電機(jī)轉(zhuǎn)速和轉(zhuǎn)向的一種電機(jī)。直流伺服電機(jī)通常具有高速度和高精度的優(yōu)點(diǎn),廣泛應(yīng)用于工業(yè)自動(dòng)化領(lǐng)域。
2023-03-12 10:20:324990 伺服控制器(Servo Controller)是一種電子設(shè)備,用于控制伺服電機(jī)的運(yùn)動(dòng)和位置。伺服電機(jī)是一種精密的電機(jī),具有高精度、高速度和高力矩等特點(diǎn),廣泛應(yīng)用于各種需要精準(zhǔn)控制的自動(dòng)化設(shè)備和機(jī)器人
2023-03-12 11:12:197266 運(yùn)動(dòng)控制是工業(yè)自動(dòng)化系統(tǒng)的子系統(tǒng)。它同步化控制多個(gè)電機(jī)來完成一系列運(yùn)動(dòng)。例如,多軸機(jī)械臂需要多個(gè)電機(jī)無縫地協(xié)同運(yùn)行才能做出特定的動(dòng)作。運(yùn)動(dòng)控制主要用于軌跡規(guī)劃、速度規(guī)劃、插補(bǔ)算法和運(yùn)動(dòng)學(xué)轉(zhuǎn)換。運(yùn)動(dòng)控制系統(tǒng)經(jīng)常出現(xiàn)在印刷、包裝和裝配應(yīng)用中。
2023-03-14 09:17:02821 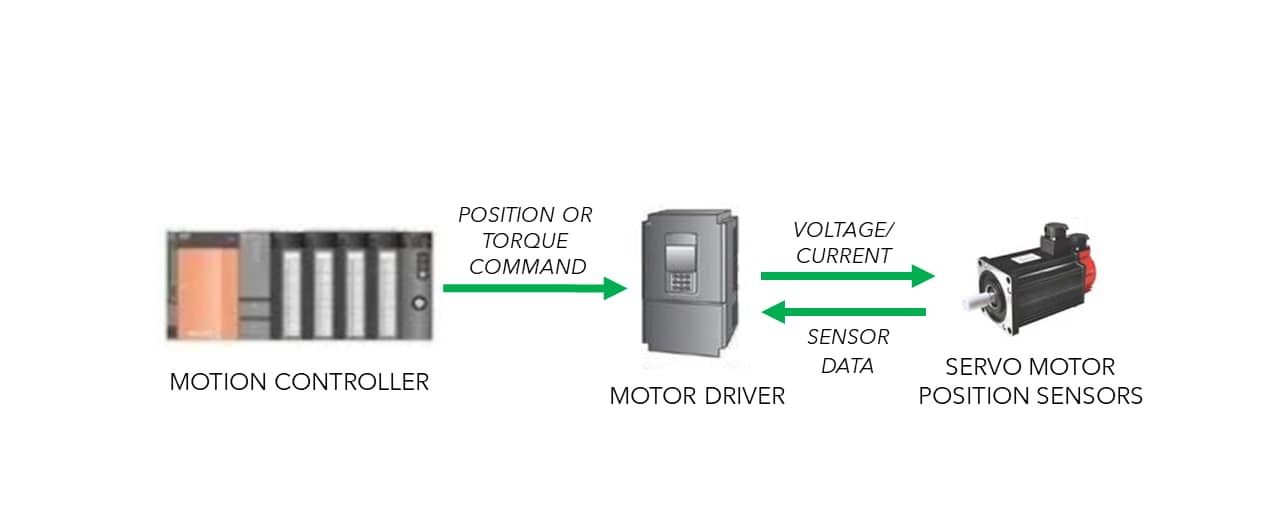
伺服電機(jī)配合伺服控制器精確控制電機(jī)軸的角位置、速度和加速度。這是通過帶有解析器(與控制器的模擬通信)或絕對(duì)或增量編碼器(與控制器的數(shù)字通信)的閉環(huán)反饋系統(tǒng)來實(shí)現(xiàn)的,它提供軸的位置信息和速度。
2023-03-25 17:16:442706 JMDM-20DIOMBADD串口控制 2 路步進(jìn)伺服電機(jī)高速運(yùn)動(dòng)系統(tǒng)是深圳市精敏數(shù)字機(jī)器有限公 司自主研發(fā)的一種主要由電腦和工業(yè)級(jí)高可靠步
進(jìn)電機(jī)串口控制器實(shí)現(xiàn)的串口控制 2 路步進(jìn)(或伺 服
2023-04-03 15:09:060 在回答這個(gè)問題之前,首先要清楚伺服電機(jī)的用途,相對(duì)于普通的電機(jī)來說,伺服電機(jī)主要用于精確定位,因此大家通常所說的伺服控制,其實(shí)就是對(duì)伺服電機(jī)的位置控制。 其實(shí),伺服電機(jī)還用另外兩種工作模式,那就是速度控制和轉(zhuǎn)矩控制,不過應(yīng)用比較少而已。
2023-04-27 17:34:352497 
伺服電機(jī)是一個(gè)閉環(huán)系統(tǒng),它使用位置反饋來控制其運(yùn)動(dòng)和最終位置。伺服電機(jī)有多種類型,其主要特點(diǎn)是能夠精確控制其軸的位置。在工業(yè)型伺服電機(jī)中,位置反饋傳感器通常是高精度編碼器,而在較小的 RC 或業(yè)余
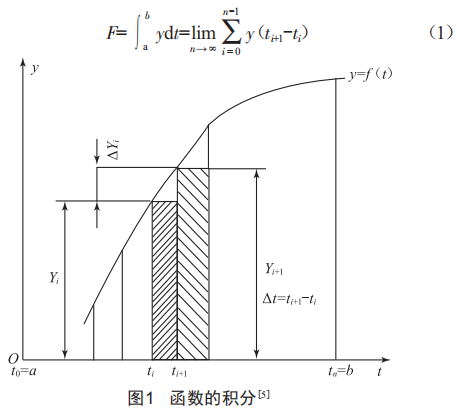
2023-05-06 10:08:212 速輪廓控制等等,其主要關(guān)鍵在于降低整體系統(tǒng)運(yùn)動(dòng)控制的路徑誤差;伺服驅(qū)動(dòng)器負(fù)責(zé)伺服電機(jī)的位置控制,主要關(guān)鍵在于降低伺服軸的追隨誤差。圖1所示是一個(gè)多軸運(yùn)動(dòng)控制系統(tǒng)的簡(jiǎn)化控制方塊圖,在一般的情況下各軸之間
2023-05-09 10:56:392245 
控制器控制伺服電機(jī)通常采用兩種指令方式:數(shù)字脈沖和模擬信號(hào)。數(shù)字脈沖這種方式與步進(jìn)電機(jī)的控制方式類似,運(yùn)動(dòng)控制器給伺服驅(qū)動(dòng)器發(fā)送“脈沖/方向”或“CW/CCW”類型的脈沖指令信號(hào);伺服驅(qū)動(dòng)器工作在位
2023-05-09 14:43:032108 運(yùn)動(dòng)控制是工業(yè)自動(dòng)化系統(tǒng)的子系統(tǒng)。它同步化控制多個(gè)電機(jī)來完成一系列運(yùn)動(dòng)。例如,多軸機(jī)械臂需要多個(gè)電機(jī)無縫地協(xié)同運(yùn)行才能做出特定的動(dòng)作。運(yùn)動(dòng)控制主要用于軌跡規(guī)劃、速度規(guī)劃、插補(bǔ)算法和運(yùn)動(dòng)學(xué)轉(zhuǎn)換。運(yùn)動(dòng)控制系統(tǒng)經(jīng)常出現(xiàn)在印刷、包裝和裝配應(yīng)用中。
2023-05-25 10:28:551054 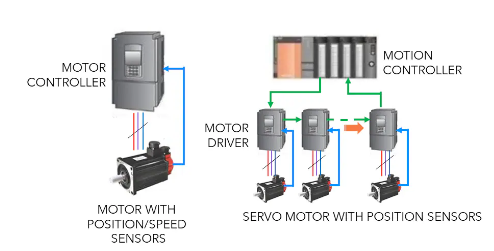
軸協(xié)調(diào)控制的一種高性能的步進(jìn)/伺服電機(jī)運(yùn)動(dòng)控制卡,包括脈沖輸出、脈沖計(jì)數(shù)、數(shù)字輸入、數(shù)字輸出、D/A輸出等功能,它能夠發(fā)出連續(xù)的、高頻率的脈沖串,運(yùn)動(dòng)控制卡控制電機(jī)速度的方式是通過改變發(fā)出脈沖的頻率來操作的,控制電機(jī)的位置是通過的
2023-06-14 15:39:061433 伺服電機(jī)作為精準(zhǔn)運(yùn)動(dòng)和智能控制的引擎,在現(xiàn)代工業(yè)和自動(dòng)化領(lǐng)域發(fā)揮著重要作用。它具備高精度的位置控制和動(dòng)態(tài)響應(yīng)能力,能夠?qū)崿F(xiàn)高速、高精度的運(yùn)動(dòng)控制。
2023-06-20 11:34:39890 轉(zhuǎn)換器(ADC),并與運(yùn)動(dòng)控制系統(tǒng)中的伺服電機(jī)、驅(qū)動(dòng)器和傳感器等設(shè)備進(jìn)行通訊。運(yùn)動(dòng)控制器被廣泛應(yīng)用于許多領(lǐng)域,尤其是在交流伺服和多軸控制系統(tǒng)中。它可以充分利用計(jì)算資
2023-07-31 17:42:411453 
1、所謂位置環(huán)的“環(huán)”,不是我們說的PID閉環(huán),位置不能像速度大小、電流大小那樣通過調(diào)節(jié)器調(diào)節(jié);
2、電機(jī)轉(zhuǎn)子、運(yùn)動(dòng)體的位置可以用編碼器也可以直接用位置檢測(cè)的方法,所以伺服都有直接位置檢測(cè)信號(hào)的輸入接口!
3、所謂運(yùn)動(dòng)控制的方式,主要是看運(yùn)動(dòng)體的那個(gè)運(yùn)動(dòng)參數(shù)受到控制:
2023-08-08 11:47:322700 在回答這個(gè)問題之前,首先要清楚伺服電機(jī)的用途,相對(duì)于普通的電機(jī)來說,伺服電機(jī)主要用于精確定位,因此大家通常所說的控制伺服,其實(shí)就是對(duì)伺服電機(jī)的位置控制。其實(shí),伺服電機(jī)還用另外兩種工作模式,那就是速度控制和轉(zhuǎn)矩控制,不過應(yīng)用比較少而已。
2023-08-09 09:25:281596 在回答這個(gè)問題之前,首先要清楚伺服電機(jī)的用途,相對(duì)于普通的電機(jī)來說,伺服電機(jī)主要用于精確定位,因此大家通常所說的控制伺服,其實(shí)就是對(duì)伺服電機(jī)的位置控制。其實(shí),伺服電機(jī)還用另外兩種工作模式,那就是速度控制和轉(zhuǎn)矩控制,不過應(yīng)用比較少而已。
2023-09-08 11:22:482266 伺服電機(jī)重要的應(yīng)用是定位控制。位置控制有兩個(gè)需要控制的物理量,即速度和位置。準(zhǔn)確地說,是控制伺服電機(jī)到達(dá)位置的速度和停止的速度。
2023-11-06 10:29:182085 伺服電機(jī)是一種特殊的電機(jī),可以根據(jù)控制信號(hào)準(zhǔn)確地控制角度、速度和位置。伺服電機(jī)的最簡(jiǎn)單控制方法可以分為開環(huán)控制和閉環(huán)控制兩種。 開環(huán)控制:開環(huán)控制是指通過直接提供控制信號(hào),使伺服電機(jī)旋轉(zhuǎn)到所設(shè)
2024-01-14 14:40:273114 伺服電機(jī)作為現(xiàn)代工業(yè)自動(dòng)化領(lǐng)域中不可或缺的重要組成部分,其控制模式的精確性和多樣性對(duì)于實(shí)現(xiàn)高效、穩(wěn)定、準(zhǔn)確的運(yùn)動(dòng)控制至關(guān)重要。本文將詳細(xì)介紹伺服電機(jī)的三種主要控制模式:位置控制模式、速度控制模式和轉(zhuǎn)矩控制模式,并結(jié)合實(shí)際應(yīng)用場(chǎng)景,闡述各種控制模式的特點(diǎn)、優(yōu)缺點(diǎn)以及適用場(chǎng)景。
2024-06-05 14:59:373250 運(yùn)動(dòng)控制卡伺服電機(jī)控制是現(xiàn)代工業(yè)自動(dòng)化領(lǐng)域中一項(xiàng)重要的技術(shù),它涉及到運(yùn)動(dòng)控制卡、伺服電機(jī)、控制算法等多個(gè)方面。本文將詳細(xì)介紹運(yùn)動(dòng)控制卡伺服電機(jī)的控制原理、控制方法、控制策略以及實(shí)際應(yīng)用等方面的內(nèi)容
2024-06-12 14:13:222031 和過程控制的區(qū)別和聯(lián)系。 運(yùn)動(dòng)控制 定義: 運(yùn)動(dòng)控制是指對(duì)機(jī)械設(shè)備的運(yùn)動(dòng)進(jìn)行精確控制,以實(shí)現(xiàn)預(yù)定的運(yùn)動(dòng)軌跡、速度和加速度。這種控制通常涉及到位置、速度和加速度的精確控制。 關(guān)鍵技術(shù): 伺服電機(jī)控制: 使用伺服電機(jī)來實(shí)
2024-06-13 09:19:306252 ? ? ? 在自動(dòng)化控制的世界中,伺服電機(jī)和步進(jìn)電機(jī)是實(shí)現(xiàn)精準(zhǔn)動(dòng)力傳輸?shù)?b class="flag-6" style="color: red">兩個(gè)關(guān)鍵角色。雖然它們的終極目標(biāo)相同,即精確控制機(jī)械運(yùn)動(dòng),但它們的工作原理和最佳應(yīng)用場(chǎng)景卻有所不同。本文將帶你了解伺服電機(jī)
2024-06-17 16:21:542476 
機(jī)器視覺控制軸運(yùn)動(dòng)原理是一個(gè)復(fù)雜而深入的主題。下面將從以下幾個(gè)方面進(jìn)行介紹: 機(jī)器視覺概述 機(jī)器視覺是一種模擬人類視覺的計(jì)算機(jī)技術(shù),通過圖像采集、處理和分析來實(shí)現(xiàn)對(duì)物體的識(shí)別、定位、測(cè)量和分類等功能
2024-07-04 10:42:161422 為機(jī)械能的裝置,其核心部件是電機(jī)。伺服電機(jī)具有高精度、高響應(yīng)速度、高穩(wěn)定性等特點(diǎn),可以精確控制電機(jī)的轉(zhuǎn)速、位置和力矩。伺服電機(jī)的工作原理是將輸入的電信號(hào)轉(zhuǎn)換為電機(jī)的機(jī)械運(yùn)動(dòng),實(shí)現(xiàn)對(duì)電機(jī)的精確控制。 脈沖控制的基本
2024-07-14 10:37:312468 步進(jìn)電機(jī)伺服控制系統(tǒng)是一種精密的電機(jī)控制系統(tǒng),它通過精確控制電機(jī)的步進(jìn)角度來實(shí)現(xiàn)對(duì)機(jī)械運(yùn)動(dòng)的精確控制。這種系統(tǒng)廣泛應(yīng)用于自動(dòng)化設(shè)備、機(jī)器人、精密儀器等領(lǐng)域。 步進(jìn)電機(jī)伺服控制系統(tǒng)的作用 步進(jìn)電機(jī)伺服
2024-09-04 09:46:121709 補(bǔ)助馬達(dá)間接變速裝置。伺服電機(jī)能夠?qū)㈦妷盒盘?hào)轉(zhuǎn)化為轉(zhuǎn)矩和轉(zhuǎn)速,用以驅(qū)動(dòng)控制對(duì)象,從而實(shí)現(xiàn)對(duì)機(jī)械運(yùn)動(dòng)的精確控制。伺服電機(jī)的工作原理可以簡(jiǎn)單概括為:輸入控制信號(hào)→伺服控制器→伺服電機(jī)→輸出運(yùn)動(dòng)。 伺服電機(jī)系統(tǒng)主要由電機(jī)本體、驅(qū)
2024-10-22 16:58:204136 在自動(dòng)化控制系統(tǒng)中,電機(jī)控制器和伺服系統(tǒng)是實(shí)現(xiàn)精確運(yùn)動(dòng)控制的關(guān)鍵組件。電機(jī)控制器負(fù)責(zé)接收控制信號(hào)并驅(qū)動(dòng)電機(jī),而伺服系統(tǒng)則確保電機(jī)按照預(yù)定的軌跡和速度精確運(yùn)動(dòng)。 電機(jī)控制器的基本概念 電機(jī)控制器是一種
2025-01-22 09:35:461595 伺服驅(qū)動(dòng)器,基于網(wǎng)絡(luò)的多軸運(yùn)動(dòng)控制器和集成伺服電機(jī)。所有產(chǎn)品均可通過埃莫先進(jìn)且簡(jiǎn)單易用的世界一流軟件工具整定和配置。憑借令人贊嘆的先進(jìn)技術(shù),我們致力于推動(dòng)全球的運(yùn)動(dòng)
2022-01-10 10:48:04
 電子發(fā)燒友App
電子發(fā)燒友App
















 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論