labview如何快速精確控制步進電機實現(xiàn)定位運動
2022-08-26 11:12:49 6137
6137 
步進電機是一個用數(shù)字來控制運動的數(shù)字化電機,特別適用于精準(zhǔn)控制場合。今天,我們將通過步進電機控制云臺準(zhǔn)確定位轉(zhuǎn)動的應(yīng)用,詳細講解一下對步進電機運動的控制。
2022-09-08 14:21:421656 運動控制與電機控制經(jīng)常同時出現(xiàn),有點讓人混淆。這兩個概念有什么區(qū)別?在工業(yè)自動化中,我們?nèi)绾螌⑶‘?dāng)?shù)慕鉀Q方案應(yīng)用于其中一個概念,或同時應(yīng)用于這兩個概念?
2023-08-01 16:16:111488 
如何理解foc控制FOC控制是一種高級電機控制技術(shù),可以提高電機的功率、效率和控制精度。FOC控制的核心思想是使用磁場定向控制電機,將電機的輸出控制轉(zhuǎn)換為磁通量和電流的控制,從而使電機保持高效穩(wěn)定
2023-07-31 17:28:133821 
概述本文主要介紹BLDC電機控制的實現(xiàn)原理,還介紹了3類直流電機的工作方式以及控制的特點。從簡單的鉆機到復(fù)雜的工業(yè)機器人,許多機器設(shè)備都使用無刷直流電機將電能轉(zhuǎn)換為旋轉(zhuǎn)運動。掌握直流電機的控制是實現(xiàn)
2025-05-26 19:33:514537 
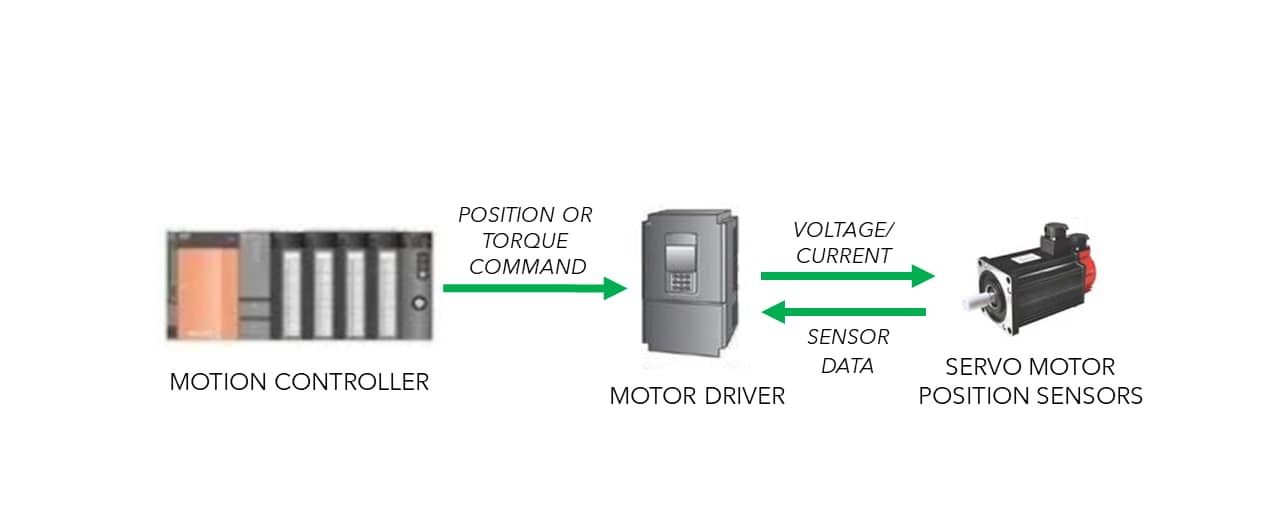
扭矩信號)轉(zhuǎn)換為更高功率的電流或電壓信號。更為先進的智能化驅(qū)動可以自身閉合位置環(huán)和速度環(huán),以獲得更精確的控制。一個執(zhí)行器如液壓泵、氣缸、線性執(zhí)行機或電機用以輸出運動。一個反饋傳感器如光電編碼器,旋轉(zhuǎn)
2016-05-07 19:22:19
本人對運動控制卡一無所知,想問一下運動控制是不是也像數(shù)據(jù)采集卡一樣有多組通道呢,一塊運動控制卡能不能實現(xiàn)同時控制幾個電機做相同的運動呢?
2013-06-05 00:45:32
完整的控制系統(tǒng)是什么樣的?控制器的作用是什么?上位機做什么?單片機可以做什么?運動控制和電機控制的區(qū)別是什么?
2021-10-28 06:34:31
在內(nèi)部閉合一個速度環(huán)。 一個驅(qū)動或放大器用以將來自運動控制器的控制信號(通常是速度或扭矩信號)轉(zhuǎn)換為更高功率的電流或電壓信號。更為先進的智能化驅(qū)動可以自身閉合位置環(huán)和速度環(huán),以獲得更精確的控制。 一個
2022-03-03 15:43:50
運動控制器控制伺服電機的指令方式運動控制器以模擬量信號控制伺服電機的調(diào)試步驟
2021-01-21 07:15:51
及位置控制等功能;FPGA完成運動控制器的精插補功能,用于精確計算步進電機或伺服驅(qū)動元件的控制脈沖,同時接收并處理脈沖型位置反饋信號。本文深刻探討了運動控制器是如何進行設(shè)計的?
2019-07-31 08:15:26
運動控制基礎(chǔ)-電機基礎(chǔ)運動控制基礎(chǔ)-電機基礎(chǔ)使用智能伺服,我們通常不需要了解電機的具體細節(jié),通過簡單地發(fā)送指令給智能伺服,它就可以實現(xiàn)我們需要的運動。但是,如果你在使用智能伺服時,希望能夠達到最佳
2018-05-16 10:31:44
使用動力源的不同,運動控制主要可分為以電動機作為動力源的電氣運動控制、以氣體和流體作為動力源的氣液控制以燃料(煤、油等)作為動力源的熱機運動控制等二、原理 電氣運動控制是由電機拖...
2021-09-07 06:37:22
一定的位置變化,這時需要的控制量就不再是電機的轉(zhuǎn)速,而是控制對象的直線位移,因此需將電機的轉(zhuǎn)速輸出轉(zhuǎn)換為電機的位移輸出。
2019-08-20 08:00:58
編程語言。我們公司是通過調(diào)用DLL動態(tài)鏈接庫連調(diào)用運動控制卡的驅(qū)動,除了會使用運動控制卡之外,還需要學(xué)習(xí)步進電機和伺服電機的相關(guān)知識。由于這方面涉及公司的知識產(chǎn)權(quán),所以不方便和大家分享,抱歉。關(guān)于視覺
2015-02-10 11:30:19
如題,PID的輸出數(shù)據(jù)如何轉(zhuǎn)換為控制變量。××××××××××模型一:加熱箱設(shè)定值SV, 檢測值PV,PID計算結(jié)果MV。 執(zhí)行結(jié)構(gòu)是加熱塊。MV是一個數(shù)值,無單位。 執(zhí)行結(jié)構(gòu)通常是PWM控制的固態(tài)
2017-07-18 19:55:04
什么是運動控制卡?運動控制卡與驅(qū)動器有什么不同?PLC控制好還是運動控制卡控制好?
2021-10-09 07:56:29
如何去實現(xiàn)基于STM32F407ZGT6芯片控制板機器人的運動控制系統(tǒng)設(shè)計?STM32F407是如何控制電機做正反轉(zhuǎn)的正弦運動的?
2021-10-15 07:57:50
電機控制 運動套件
2024-03-14 20:43:07
步進電機運動控制器
2023-03-23 04:52:55
步進電機運動控制器
2023-03-28 18:24:44
步進電機運動控制器
2023-03-24 15:11:47
用laBVIEW簡單控制伺服電機正/反轉(zhuǎn),并讀取轉(zhuǎn)動圈數(shù),硬件需求中必須要運動控制卡嗎?或者要用到什么類型的運動控制卡。轉(zhuǎn)動速度在0.5-1圈/秒。
2018-03-12 09:49:13
`不知道有沒有大神玩過,用labview控制雷賽的運動控制卡,進而控制伺服電機。前幾天用的好好的,不知道從什么時候開始,labview無法控制了。而這個運動控制卡自帶的例程(應(yīng)該是用C語言寫的),還能正常控制。請問問題可能出在什么地方??`
2017-03-02 10:15:36
stm8l單片機是如何控制電機運動的?stm8l單片機控制電機運動的程序為什么在大電機上就不可以運行?
2021-08-11 08:13:28
項目名稱:機器人運動控制板(電機控制)項目試用計劃:本人目前從事機器人嵌入式軟件開發(fā),專注于電機控制,實現(xiàn)電機運動控制算法,由于公司機器人運動邏輯越來越復(fù)雜,包含多個運動電機(步進伺服、伺服),目前
2018-01-22 10:32:40
什么是運動控制系統(tǒng)?運動控制系統(tǒng)的任務(wù)是什么?
2021-10-29 07:40:48
如何用伺服電機控制四個蝸桿同時上下運動,需要多少個電機
2018-05-12 01:01:56
需要做一個基于labview 加運動控制卡的伺服電機運動控制系統(tǒng),請問PCI-7831R 這塊板是運動控制卡嗎,可不可以用來做,百度了是什么多功能RIO,新手,不太懂求指教
2015-12-09 18:15:35
請問各位大神,我做實驗使用的是雷塞DMC2210的運動控制卡,來控制松下A5系列的伺服電機。之前做實驗轉(zhuǎn)速一直都是好好的,現(xiàn)在卻經(jīng)常出現(xiàn)轉(zhuǎn)速控制不了的問題:就是無論我面板上輸入多大轉(zhuǎn)速,電機始終是
2016-05-28 15:14:57
為了改善永磁同步直線電機在數(shù)控珩磨機主軸往復(fù)運動時的伺服性能,建立了永磁同步直線電機的數(shù)學(xué)模型。 通過對直線電機運動系統(tǒng)數(shù)學(xué)模型進行分析,得出系統(tǒng)參數(shù)攝動、推力波動、負(fù)載擾動等不確定因素是造成控制
2025-03-12 17:07:48
現(xiàn)在市場上有基于FPGA的多電機運動控制器的成品嗎,注意是成品喲,成品!成品!成品!
2016-01-19 11:22:17
RT,我想做labview的電機控制,兩者中間通過運動控制卡。然后我的電機的每個時刻的轉(zhuǎn)角位置已經(jīng)導(dǎo)入txt格式的文本中,,那么這個程序該怎么寫啊?求大神回復(fù)
2015-04-26 23:16:35
我想用pmac控制電機運動,pmac與labview通信,并通過labview實時顯示電機運動狀況,請問labview中如何采集信號?采集到的信號我想以波形圖的形式輸出并進行分析
2017-05-09 16:05:49
現(xiàn)在我有一個電機,希望電機運動到我所需要的速度,由于電機速度不能突增(會損壞電機),則希望通過恒定的加速度來使電機速度慢慢增大。我是通過發(fā)命令(控制模擬電壓量)來控制電機轉(zhuǎn)動和轉(zhuǎn)速的,之前想過用for循環(huán)的方式循環(huán)發(fā)命令,不知道朋友們還有別的好辦法。。求。。。
2015-08-06 17:08:46
如何使用運動控制卡控制電機的轉(zhuǎn)動及轉(zhuǎn)速?
2021-10-15 06:04:52
如何使用運動控制卡控制電機轉(zhuǎn)動?
2021-10-29 07:38:38
之前做過的項目都是LabVIEW+PLC,而我僅負(fù)責(zé)LabVIEW部分。從學(xué)習(xí)LabVIEW開始至今,我也一直知道LabVIEW可以通過運動控制卡控制電機,但沒這方面的知識儲備。最近剛好時間充裕
2022-05-23 15:49:20
怎么把他轉(zhuǎn)換為IO控制
2015-07-24 10:33:54
本文采用Verilog FPGA設(shè)計懸掛運動控制系統(tǒng)的控制器,通過輸入模塊傳送控制參數(shù),采用HDL語言編程實現(xiàn)的控制算法,驅(qū)動步進電機,對懸掛運動物體進行精確的控制。
2021-05-06 07:11:03
搞電機控制、運動控制現(xiàn)在是使用SMT32的多嗎?還是用C2000的DSP的多? 分享| 1 分鐘前用哪個有前途?單片機51比較熟悉,2407和2812有接觸和簡單使用。想搞電機控制、運動控制,該深入2812和 28335還是轉(zhuǎn)STM32?謝謝指點!
2016-03-06 18:40:47
李格的電機學(xué),運動控制分享給大家
2016-01-11 16:45:56
LABVIEW通過步進電機驅(qū)動器控制步進電機的運動,怎么樣給驅(qū)動器發(fā)送脈沖?一定要有運動控制卡嗎?普通數(shù)據(jù)采集卡行不行?
2017-12-28 16:55:33
步進電機的線速度控制資料下載,1. 介紹這篇應(yīng)用筆記描述怎樣去實現(xiàn)步進電機的線速度控制,步進電機是一個電磁設(shè)備將數(shù)字脈沖轉(zhuǎn)換為機械軸轉(zhuǎn)動,使用這種電機有很多優(yōu)點,例如因為沒有電刷與觸點存在所以使用跟
2021-07-08 08:39:03
直流電機運動控制的過程中怎么實現(xiàn)高精度的位置控制
2023-10-11 06:23:00
使用雷賽DMC1380運動控制卡的時候,通過提供的測試軟件可以檢測到運動控制卡,但無法使電機運行(已檢查過硬件連線,使用脈沖發(fā)生器提供連續(xù)方波可使電機連續(xù)運轉(zhuǎn))簡單寫了個vi,也不能控制電機運行。想請教一下大佬,有什么方案排查問題嗎?
2018-10-26 16:38:56
小車運動及速度控制一、實驗?zāi)康男≤囋?b class="flag-6" style="color: red">運動中,控制小車的控制速度是必要,通過控制小車驅(qū)動電機的電流可以實現(xiàn)對電機速度的控制。采用PWM 脈沖可以
2009-03-23 11:01:123564 
步進電機的速度控制及運動規(guī)律
步進電機區(qū)別于其他控制用途電機的最大特點是,它可接受數(shù)字控制信號(電脈沖信號)并轉(zhuǎn)化成與之相對應(yīng)的角位移
2009-09-17 15:07:5210108 
基于DSP的運動控制器的開發(fā)
運動控制器是一種用于多種運動控制場合的上位控制單元,通常采用專業(yè)運動控制芯片或高速DSP來控制步進電機或伺服電機。運動控制器
2009-12-25 09:44:072332 
為了降低研發(fā)成本,減輕微控制器的壓力,提高系統(tǒng)的穩(wěn)定性和靈活性,提出了一種基于專用控制芯片的步進電機運動控制系統(tǒng)設(shè)計方案。該運動控制系統(tǒng)中主要采用了微控制器AT90CA
2012-05-30 15:08:31 57
57 本文介紹使用MODBUS現(xiàn)場總線與伺服控制技術(shù)統(tǒng)一,實現(xiàn)設(shè)備遠程監(jiān)控、電機運動控制配置與實現(xiàn)方案的方法。
2012-12-10 11:26:5212093 
步進電機由于體積精巧、價格低廉、運行穩(wěn)定,在低端行業(yè)應(yīng)用廣泛,步進電機運動控制實現(xiàn)全閉環(huán),是工控行業(yè)的一大難題。主要問題有兩個,原點的不確定性和失步,目前,采用高速光電開關(guān)作為步進系統(tǒng)的原點,這個誤差在毫米級,所以在精確控制領(lǐng)域
2018-03-12 14:32:3125729 
多軸步進電機插補控制器及多軸步進電機運動控制卡控制方法
2018-04-11 10:24:4729 技術(shù)需知伺服電機調(diào)試的基本步驟, 運動控制器控制伺服電機通常采用兩種指令方式: 1、數(shù)字脈沖 這種方式與步進電機的控制方式類似,運動控制器給伺服驅(qū)動器發(fā)送脈沖/方向或CW/CCW類型的脈沖指令信號
2020-06-12 14:45:486476 工業(yè)控制主要分兩個方向,一個是運動控制,通常用于機械領(lǐng)域;另一個就是過程控制,通常使用于化工領(lǐng)域。而運動控制指的是一種起源于早期的伺服系統(tǒng),基于電動機的控制,以實現(xiàn)物體對角位移、轉(zhuǎn)矩、轉(zhuǎn)速等等物理量改變的控制。
2019-03-03 11:01:337954 VC++6.0進行2軸運動控制卡控制電機轉(zhuǎn)動實驗
1970-01-01 08:00:000 無論您的產(chǎn)品有1個電機或者30個電機,它都值得配備工業(yè)上領(lǐng)先的電機控制。 通過訂制電機和運動控制方案,節(jié)約寶貴資源,優(yōu)化產(chǎn)品開發(fā)。在Trinamic的訂制方案中,用戶的成功就是Trinamic的成功
2021-10-20 15:42:223373 運動控制是工業(yè)自動化系統(tǒng)的子系統(tǒng)。它同步化控制多個電機來完成一系列運動。例如,多軸機械臂需要多個電機無縫地協(xié)同運行才能做出特定的動作。運動控制主要用于軌跡規(guī)劃、速度規(guī)劃、插補算法和運動學(xué)轉(zhuǎn)換。運動控制系統(tǒng)經(jīng)常出現(xiàn)在印刷、包裝和裝配應(yīng)用中。
2022-07-22 09:52:466297 系列文章的第 4 部分討論了電機控制方法,例如微步,以及驅(qū)動器的選擇以實現(xiàn)更高分辨率和更平滑的運動
2022-08-10 16:38:571734 
電子發(fā)燒友網(wǎng)站提供《Cantor風(fēng)琴轉(zhuǎn)換為VPO的MIDI控制器.zip》資料免費下載
2022-11-04 09:36:470 步進電機驅(qū)動器是一種電子設(shè)備,用于控制步進電機的轉(zhuǎn)動和運動,其主要原理是將控制信號轉(zhuǎn)換為電機的驅(qū)動信號。
2023-03-08 14:30:535123 
步進電機是一種特殊的電機,可以通過輸入脈沖信號來控制它的位置和運動。步進電機通常由電機本體和驅(qū)動電路組成,驅(qū)動電路負(fù)責(zé)將輸入的脈沖信號轉(zhuǎn)換為電機的運動控制信號。
2023-03-08 14:33:335285 項目需求 利用運動控制卡,快速搭建運動控制平臺。所需硬件:個人電腦;正運動控制卡;艾思控驅(qū)動器;鳴志直流無刷電機。軟件平臺:python 硬件介紹 正運動控制卡 控制卡用于接收PC的運動指令,然后以
2023-03-10 10:01:130 目標(biāo):
1、指定簡單的電機控制協(xié)議,支持通過串口通訊對多步進電機進行運動控制
2、支持詳細參數(shù)輸入的運動控制模式:控制方向、轉(zhuǎn)速、加減速率、細分等
3、支持位置控制模式,按照協(xié)議格式,輸入電機編號和位置,對多電機進行控制
2023-03-23 10:23:1311 運動控制是工業(yè)自動化系統(tǒng)的子系統(tǒng)。它同步化控制多個電機來完成一系列運動。例如,多軸機械臂需要多個電機無縫地協(xié)同運行才能做出特定的動作。運動控制主要用于軌跡規(guī)劃、速度規(guī)劃、插補算法和運動學(xué)轉(zhuǎn)換。運動控制系統(tǒng)經(jīng)常出現(xiàn)在印刷、包裝和裝配應(yīng)用中。
2023-05-25 10:28:551054 
FOC控制是一種高級電機控制技術(shù),可以提高電機的功率、效率和控制精度。FOC控制的核心思想是使用磁場定向控制電機,將電機的輸出控制轉(zhuǎn)換為磁通量和電流的控制,從而使電機保持高效穩(wěn)定的運行狀態(tài)。
2023-06-10 17:39:005249 運動控制器是一種特殊的控制器,用于控制電機的運行模式:例如,電機通過沖擊開關(guān)控制交流接觸器,將電機拉到指定位置,然后下降或使用時間繼電器控制電機的前后旋轉(zhuǎn),或先停一會兒,再停一會兒。運動控制在機器人和數(shù)控機床領(lǐng)域的應(yīng)用比在專用機床中更復(fù)雜,因為后者的運動形式更簡單,通常被稱為通用運動控制。
2023-06-12 17:17:233281 運動控制卡是基于PC機及工業(yè)PC機、 用于各種運動控制場合(包括位移、速度、加速度等)的上位控制單元。 運動控制卡基于PC總線,是利用高性能微處理器(如DSP)及大規(guī)模可編程器件實現(xiàn)多個伺服電機的多
2023-06-14 15:39:061433 ,仍然依靠機器人和運動控制。運動控制與電機控制經(jīng)常同時出現(xiàn),有點讓人混淆。這兩個概念有什么區(qū)別?在工業(yè)自動化中,我們?nèi)绾螌⑶‘?dāng)?shù)慕鉀Q方案應(yīng)用于其中一個概念,或同時應(yīng)用
2023-06-07 10:03:451632 伺服電機作為精準(zhǔn)運動和智能控制的引擎,在現(xiàn)代工業(yè)和自動化領(lǐng)域發(fā)揮著重要作用。它具備高精度的位置控制和動態(tài)響應(yīng)能力,能夠?qū)崿F(xiàn)高速、高精度的運動控制。
2023-06-20 11:34:39890 運動控制與電機控制經(jīng)常同時出現(xiàn),有點讓人混淆。這兩個概念有什么區(qū)別?在工業(yè)自動化中,我們?nèi)绾螌⑶‘?dāng)?shù)慕鉀Q方案應(yīng)用于其中一個概念,或同時應(yīng)用于這兩個概念?
2023-07-13 16:20:33639 
1.運動控制為數(shù)控機床、機器人等高端裝備“大腦” 1.1 運動控制系統(tǒng)是數(shù)控機床、機器人等高端裝備高效運行核心環(huán)節(jié) 運動控制系統(tǒng)是依照具體的運動軌跡要求,根據(jù)負(fù)載情況,通過驅(qū)動器、驅(qū)動執(zhí)行電機完 成
2023-07-07 11:17:503382 
直流電機控制器是將電能轉(zhuǎn)換為機械能的一種特殊類型的電氣設(shè)備,直流電機通過利用直流電來接收電能,然后將這種能量轉(zhuǎn)換為電機的自動旋轉(zhuǎn)。
2023-07-19 16:51:411652 
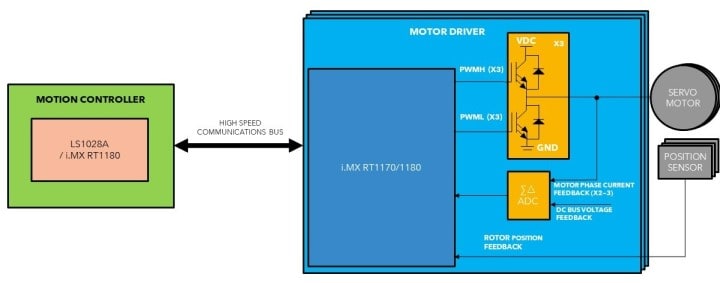
轉(zhuǎn)換器(ADC),并與運動控制系統(tǒng)中的伺服電機、驅(qū)動器和傳感器等設(shè)備進行通訊。運動控制器被廣泛應(yīng)用于許多領(lǐng)域,尤其是在交流伺服和多軸控制系統(tǒng)中。它可以充分利用計算資
2023-07-31 17:42:411453 1、所謂位置環(huán)的“環(huán)”,不是我們說的PID閉環(huán),位置不能像速度大小、電流大小那樣通過調(diào)節(jié)器調(diào)節(jié);
2、電機轉(zhuǎn)子、運動體的位置可以用編碼器也可以直接用位置檢測的方法,所以伺服都有直接位置檢測信號的輸入接口!
3、所謂運動控制的方式,主要是看運動體的那個運動參數(shù)受到控制:
2023-08-08 11:47:322700 從家中的簡單DVD播放器或打印機到高度復(fù)雜的CNC機器或機械臂,步進電機幾乎隨處可見。其能夠以電子方式控制精確運動的能力使這些電機在監(jiān)視設(shè)備、硬盤、CNC機器、3D打印機、機器人技術(shù)、裝配
2023-09-14 08:09:132148 轉(zhuǎn)換器(ADC),并與運動控制系統(tǒng)中的伺服電機、驅(qū)動器和傳感器等設(shè)備進行通訊。運動控制器被廣泛應(yīng)用于許多領(lǐng)域,尤其是在交流伺服和多軸控制系統(tǒng)中。它可以充分利用計算資
2023-09-21 08:08:391842 電機控制更側(cè)重于使電機正常旋轉(zhuǎn),或者更確切地說,是換向。為了做到這一點,電機控制器需要與各種傳感器對接,處理模擬和數(shù)字信號,并生成波形來驅(qū)動電機。所有這些都發(fā)生在非常短的時間環(huán)路內(nèi),范圍從50微秒到300微秒。
2023-10-10 18:18:201954 
運動控制其實是基于電動機的,這里的電動機指的是伺服電機;如果一套單機設(shè)備上只用了一臺伺服電機,這種情況下是更注重于對電機的一個控制,如位置、速度、轉(zhuǎn)矩的控制;這個例子,是想單臺電機控制只是運動控制的一個環(huán)節(jié)。
2023-10-31 12:28:151182 
Yaskawa安川電機是全球知名的伺服系統(tǒng)制造商,其高精度運動控制技術(shù)已廣泛應(yīng)用于各種工業(yè)領(lǐng)域。安川電機的伺服系統(tǒng)采用先進的數(shù)字控制技術(shù),具有高精度、快速響應(yīng)、穩(wěn)定可靠等特點,能夠?qū)崿F(xiàn)各種復(fù)雜運動
2023-12-08 09:02:181901 
(AC)是一種將電能轉(zhuǎn)換為機械能的設(shè)備,其工作原理是通過電流在磁場中產(chǎn)生力矩,使電機轉(zhuǎn)子旋轉(zhuǎn)。AC電機控制算法的核心目標(biāo)是實現(xiàn)對電機的精確控制,以滿足不同的運行需求。為了實現(xiàn)這一目標(biāo),AC電機控制算法需要解決以下幾個關(guān)鍵問
2024-01-11 11:21:502437 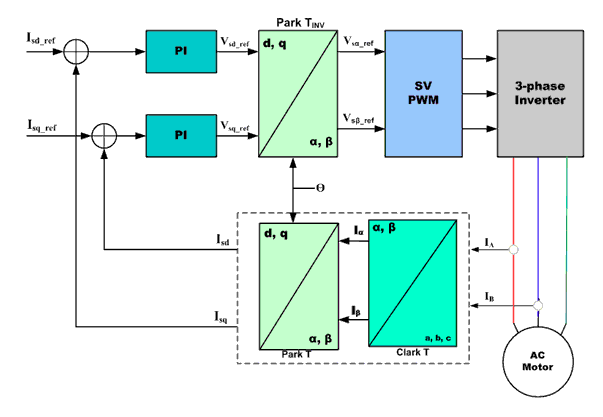
控制,需要使用步進電機控制器。步進電機控制器是一種電子裝置,用于接收和處理控制信號,并將其轉(zhuǎn)換為電機驅(qū)動信號。通過調(diào)整步進電機控制器的參數(shù)設(shè)置,可以使電機按照需求進行旋轉(zhuǎn),實現(xiàn)精確的運動控制。 在進行步進電
2024-01-19 10:50:225085 應(yīng)用。 一、運動控制系統(tǒng)的組成 執(zhí)行機構(gòu) 執(zhí)行機構(gòu)是運動控制系統(tǒng)中直接驅(qū)動機械運動的部分,通常包括電機、液壓缸、氣缸等。執(zhí)行機構(gòu)的選擇取決于所需的力矩、速度、精度等因素。 1.1 電機 電機是運動控制系統(tǒng)中最常用的執(zhí)行
2024-06-12 10:51:183314 運動控制卡伺服電機控制是現(xiàn)代工業(yè)自動化領(lǐng)域中一項重要的技術(shù),它涉及到運動控制卡、伺服電機、控制算法等多個方面。本文將詳細介紹運動控制卡伺服電機的控制原理、控制方法、控制策略以及實際應(yīng)用等方面的內(nèi)容
2024-06-12 14:13:222031 和過程控制的區(qū)別和聯(lián)系。 運動控制 定義: 運動控制是指對機械設(shè)備的運動進行精確控制,以實現(xiàn)預(yù)定的運動軌跡、速度和加速度。這種控制通常涉及到位置、速度和加速度的精確控制。 關(guān)鍵技術(shù): 伺服電機控制: 使用伺服電機來實
2024-06-13 09:19:306252 運動控制器就是控制電動機的運行方式的專用控制器:比如電動機在由行程開關(guān)控制交流接觸器而實現(xiàn)電動機拖動物體向上運行達到指定位置后又向下運行,或者用時間繼電器控制電動機正反轉(zhuǎn)或轉(zhuǎn)一會停一會再轉(zhuǎn)一會再停
2024-07-10 08:40:161289 機械能的裝置,其核心部件是電機。伺服電機具有高精度、高響應(yīng)速度、高穩(wěn)定性等特點,可以精確控制電機的轉(zhuǎn)速、位置和力矩。伺服電機的工作原理是將輸入的電信號轉(zhuǎn)換為電機的機械運動,實現(xiàn)對電機的精確控制。 脈沖控制的基本
2024-07-14 10:37:312468 步進電機是一種將電脈沖信號轉(zhuǎn)換為角位移或線位移的電動機。其工作原理基于電磁學(xué)原理,通過將電能轉(zhuǎn)換為機械能來實現(xiàn)控制。步進電機控制方法主要包括脈沖控制、?電流控制、?PID控制和?矢量控制等。
2024-09-18 14:47:322162 
步進電機是一種將電脈沖信號轉(zhuǎn)換為角位移或線位移的電機,廣泛應(yīng)用于各種自動化控制系統(tǒng)中。為了提高步進電機的性能,自適應(yīng)控制和細分驅(qū)動控制是兩種重要的技術(shù)手段。 一、步進電機的自適應(yīng)控制 自適應(yīng)控制
2024-10-23 10:04:382253 伺服電機的工作原理 伺服電機是一種能夠?qū)㈦娦盘?b class="flag-6" style="color: red">轉(zhuǎn)換為精確的機械運動的設(shè)備。它的工作原理基于電磁感應(yīng)原理,通過精確控制電機的轉(zhuǎn)速和轉(zhuǎn)矩來實現(xiàn)對機械系統(tǒng)的精確控制。 1. 基本結(jié)構(gòu) 伺服電機通常由以下
2024-12-05 15:18:314635 伺服驅(qū)動器,基于網(wǎng)絡(luò)的多軸運動控制器和集成伺服電機。所有產(chǎn)品均可通過埃莫先進且簡單易用的世界一流軟件工具整定和配置。憑借令人贊嘆的先進技術(shù),我們致力于推動全球的運動
2022-01-10 10:48:04
 電子發(fā)燒友App
電子發(fā)燒友App








 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論