") 可驅(qū)動(dòng)三軸的強(qiáng)力步進(jìn)電機(jī)伺服模塊
可驅(qū)動(dòng)三軸的強(qiáng)力步進(jìn)電機(jī)伺服模塊

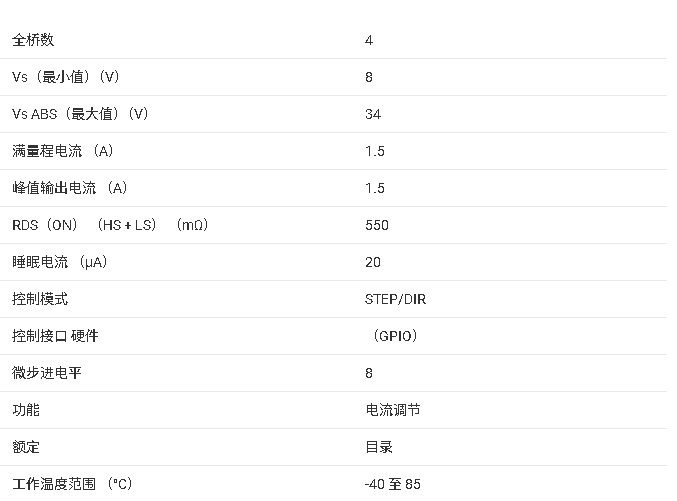
TMCM-3314和TMCM-3315都是用6.7A控制多軸的最強(qiáng)大的步進(jìn)伺服模塊。
2018年7月23日漢堡,TRINAMIC 運(yùn)動(dòng)控制公司。KG宣布推出令人印象深刻的2相雙極步進(jìn)伺服電機(jī)模塊,每個(gè)軸帶有獨(dú)立的編碼器和HOME / STOP輸入。為了確保步進(jìn)電機(jī)相應(yīng)驅(qū)動(dòng),堅(jiān)固的步進(jìn)電機(jī)伺服模塊帶有強(qiáng)大的TMC5160和專用的閉環(huán)運(yùn)動(dòng)控制器TMC4361。
TRINAMIC 運(yùn)動(dòng)控制的創(chuàng)始人兼首席執(zhí)行官M(fèi)ichael Randt解釋說:“除時(shí)間限制外,開發(fā)商越來越受到預(yù)算的限制。由于帶齒輪箱的伺服驅(qū)動(dòng)器不僅昂貴而且使用效率低,越來越多的公司轉(zhuǎn)向其他解決方案。步進(jìn)電機(jī)是帶齒輪箱的伺服電機(jī)的廉價(jià)替代品,因?yàn)樗诘退傧驴梢蕴峁┍认嗤叽绲乃欧姍C(jī)更高的扭矩。通過TMCM-3314和TMCM-3315,您可以用步進(jìn)電機(jī)的成本獲得伺服器的效率“
功能強(qiáng)大的電路板可驅(qū)動(dòng)三個(gè)高達(dá)6.7A的雙相步進(jìn)電機(jī),同時(shí)保持高能效。適用于處理液體和敏感物品的步進(jìn)電機(jī)伺服模塊,用于帶A / B / N正交編碼器的步進(jìn)電機(jī),具有S形斜坡,可實(shí)現(xiàn)精確和快速定位。其他特殊的Trinamic功能,例如易于實(shí)施的CoolStep和StealthChop,可實(shí)現(xiàn)靜音,無傳感器負(fù)載相關(guān)的電流控制。
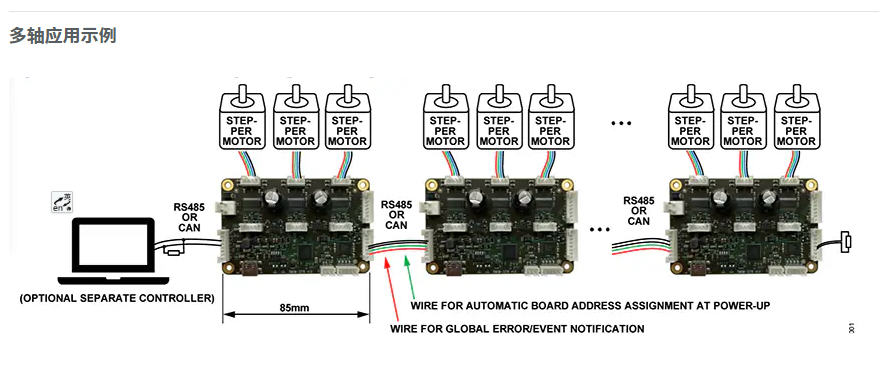
根據(jù)應(yīng)用要求,TMCM-3314和TMCM-3315都可以完成任務(wù),唯一的區(qū)別是支持的接口。 TMCM-3314支持CAN,RS485和USB接口,而TMCM-3315使用EtherCAT?和USB進(jìn)行通信。
TMCM-3314和TMCM-3315從8月初開始供貨,可通過單一單元分配。該板尺寸為280mm x 100mm。
特點(diǎn)與效益:
- 3軸閉環(huán)步進(jìn)控制器/驅(qū)動(dòng)器
- 編碼器/ HOME / STOP輸入
- 4個(gè)模擬/數(shù)字輸入和4個(gè)數(shù)字輸出
- 制動(dòng)斬波器支撐
- CAN,RS485,USB(TMCM-3314)
EtherCAT?,USB(TMCM-3315)
關(guān)于Trinamic
TRINAMIC Motion Control為運(yùn)動(dòng)和電機(jī)控制應(yīng)用開發(fā)了世界上最先進(jìn)的技術(shù)。我們先進(jìn)的集成電路,模塊和機(jī)電一體化系統(tǒng)使當(dāng)今的軟件工程師能夠快速,可靠地開發(fā)高效,平穩(wěn)和靜音工作的高精度驅(qū)動(dòng)器。 Trinamic公司總部位于德國漢堡,在愛沙尼亞的塔林設(shè)立有研發(fā)中心,并在美國芝加哥分部和中國蘇州分部擁有自己的銷售工程師團(tuán)隊(duì)。
-
步進(jìn)電機(jī)
+關(guān)注
關(guān)注
153文章
3248瀏覽量
152347 -
伺服電機(jī)
+關(guān)注
關(guān)注
88文章
2184瀏覽量
61270 -
trinamic
+關(guān)注
關(guān)注
17文章
114瀏覽量
54301
發(fā)布評論請先 登錄
六軸驅(qū)動(dòng),如何一步到位?TMCM-6214 的多軸控制!

有刷 / 無刷 / 步進(jìn) / 伺服電機(jī)分別對應(yīng)什么驅(qū)動(dòng)芯片?
告別堆疊,一體驅(qū)動(dòng):TMCM-3110 三軸步進(jìn)控制模塊
Trinamic步進(jìn)電機(jī)驅(qū)動(dòng)芯片有哪些優(yōu)點(diǎn)?

泡沫起升儀步進(jìn)/伺服電機(jī)細(xì)分驅(qū)動(dòng)技術(shù):實(shí)現(xiàn)沖程毫米級定位的電子方案

基于UART通訊控制TMC2208/2209模塊驅(qū)動(dòng)兩相四線步進(jìn)電機(jī)

步進(jìn)伺服電機(jī)的六大問題處理技巧
?DRV8821 雙路步進(jìn)電機(jī)控制器與驅(qū)動(dòng)器技術(shù)文檔總結(jié)
伺服電機(jī)和步進(jìn)電機(jī)的核心區(qū)別

DRV8849EVM雙路步進(jìn)電機(jī)驅(qū)動(dòng)器評估模塊技術(shù)解析
6軸步進(jìn)電機(jī)驅(qū)動(dòng)+STM32F767+485+CAN+網(wǎng)口+12輸入輸出原理圖
TMCM-3216步進(jìn)電機(jī)控制器/驅(qū)動(dòng)器模塊
步進(jìn)電機(jī)和伺服電機(jī)的區(qū)別是什么?
Analog Devices / Maxim Integrated PD60-4H-1461-CoE單軸步進(jìn)電機(jī)數(shù)據(jù)手冊

HJ4205步進(jìn)電機(jī)驅(qū)動(dòng)電路詳解



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論