") HPM6750芯片實現(xiàn)HMI與四軸伺服運動控制方案
HPM6750芯片實現(xiàn)HMI與四軸伺服運動控制方案

當前工業(yè)應(yīng)用多軸伺服運動控制系統(tǒng)對響應(yīng)時間、響應(yīng)速度和穩(wěn)定性等指標要求越來越高,傳統(tǒng)四軸伺服運動控制系統(tǒng)多采用模塊化方式集成,HMI+Ether CAT/NVUC等控制器+伺服驅(qū)動器(多個組成)的拓撲結(jié)構(gòu),所掛載的伺服驅(qū)動器越多,數(shù)據(jù)傳輸和處理越復(fù)雜,控制精度、實時性、同步性能也相應(yīng)受限。
四軸伺服電機方案介紹
本方案單芯片實現(xiàn)HMI與四軸伺服運動控制,無需總線通信反饋與交互控制,片內(nèi)完成所有數(shù)據(jù)采集、處理和顯示,對伺服控制和四電機的同步控制效率大大提高,如下演示視頻為通過UI交互下的四軸伺服電機運動。
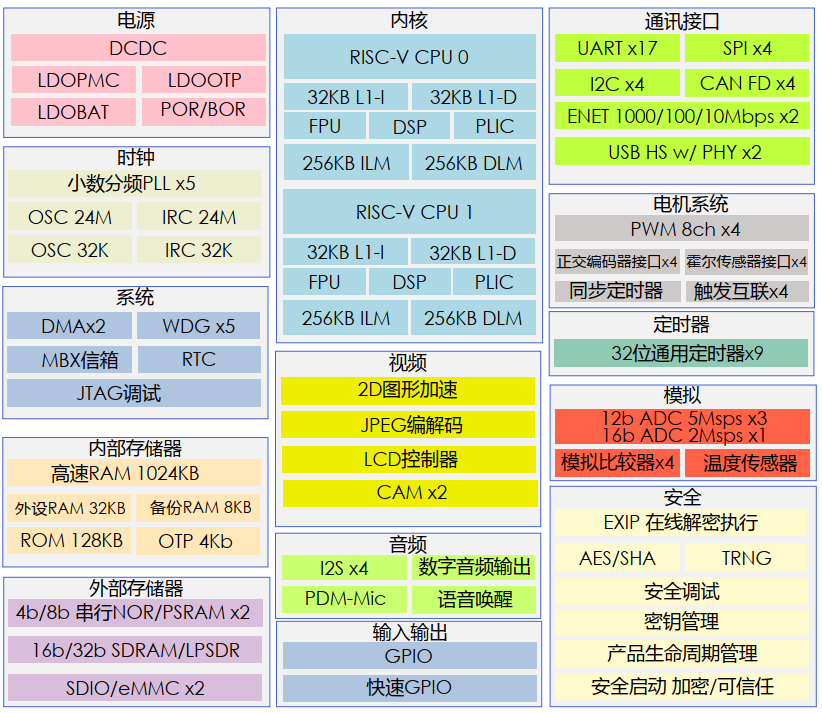
HPM6750芯片資源介紹
HPM6750采用雙RISC-V內(nèi)核,主頻達816MHz ,憑借先楫半導(dǎo)體的創(chuàng)新總線架構(gòu)、高效的L1緩存和本地存儲器,創(chuàng)下了MCU 高于 9000 CoreMark和 4500以上 的DMIPS性能新記錄,創(chuàng)造了RISC-V 全球主頻和跑分新紀錄。除了高算力RISC-V CPU,HPM6700系列產(chǎn)品還創(chuàng)造性地整合了一系列高性能外設(shè):包括支持2D圖形加速的顯示系統(tǒng)、高速USB、千兆以太網(wǎng)、CAN FD等通訊接口,高速12位和高精度16位模數(shù)轉(zhuǎn)換器,面向高性能電機控制和數(shù)字電源的運動控制系統(tǒng)。
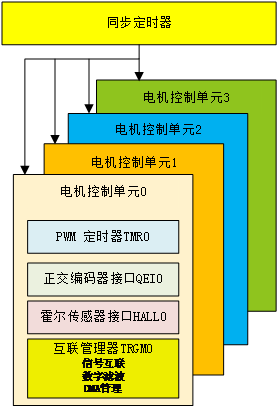
HPM6750電機控制單元介紹
HPM6750系列支持4套電機控制單元,每個單元包括1個PWM定時器,一個正交編碼器接口,一個霍爾傳感器接口和1個互聯(lián)管理接口,配合片上提供的數(shù)模轉(zhuǎn)換ADC模塊和ACMP等外設(shè),可以實現(xiàn)同時控制4個電機。包含1個同步定時器,可以用于4套電機控制單元間進行同步。
1、PWM定時器
支持4個PWM定時器,單個PWM支持高達28位計數(shù),支持24個通道;
2、同步定時器
當計數(shù)器計數(shù)達到比較值會輸出一個比較事件,可以連接到其他定時器用作同步;
3、正交編碼器接口QEI
支持4個正交編碼器接口QEI,用以測量感應(yīng)電機位置信息;
4、霍爾傳感器接口HALL
支持4個霍爾傳感器接口HALL;
5、互聯(lián)管理TRGM
支持多個外設(shè)的輸入輸出信號可以相互連接,使得多個外設(shè)可以相互配合使用;
支持數(shù)字濾波,互聯(lián)管理器支持管理外設(shè)DMA請求;
6、模擬外設(shè)
支持3個12位ADC,支持20個輸入通道,支持單端和差分輸入,高達5M采樣率;
支持1個16位ADC,支持8個輸入通道,高達2M采樣率。
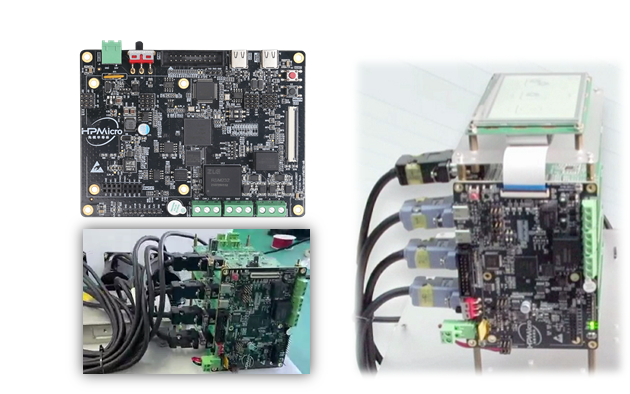
四軸伺服驅(qū)動評估板
視頻中實現(xiàn)UI顯示和四電機控制的評估為Four-Motor-HPM6750-MB評估板,該板設(shè)計上有4個電機專用接口,支持4個電機驅(qū)動板同時插入使用,同時控制4個電機。每個接口支持1路母線電壓采集、3個相電流采集、6通道PWM控制,共支持4路編碼器輸入,硬件正交解碼獲取轉(zhuǎn)子位置,實現(xiàn)伺服FOC控制。
審核編輯:郭婷
-
芯片
+關(guān)注
關(guān)注
463文章
54009瀏覽量
465969 -
半導(dǎo)體
+關(guān)注
關(guān)注
339文章
30731瀏覽量
264065 -
總線
+關(guān)注
關(guān)注
10文章
3040瀏覽量
91658
原文標題:四軸伺服+HMI單芯片解決方案
文章出處:【微信號:立功科技,微信公眾號:立功科技】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
固件燒錄速度實測:JTAG比UART快6.8倍

hpm6750 兩個板載網(wǎng)卡+usbcdc_ecm網(wǎng)卡,多次調(diào)用ftp,切換網(wǎng)卡后,報錯
CES2026:先楫半導(dǎo)體隆重推出HPM5E3Y,打造機器人運動控制芯片陣容

施耐德電氣機器運動控制“黃金四件套”整體解決方案全面推向市場
跨年早鳥福利!HPM關(guān)節(jié)伺服工程師集訓(xùn)營北京站要開課啦~

深度解析 | 低抖動高精度EtherCAT多軸控制的實現(xiàn)與實踐案例
睿擎EtherCAT多軸控制技術(shù):如何實現(xiàn)低抖動高精度運動控制 | 深度解析
TMC5041:單芯片雙軸步進電機驅(qū)控方案,賦能精密靜音運動控制

GraniStudio:單軸PTP運動例程

運動控制軸和單軸控制區(qū)別怎么選?工業(yè)自動化工程師一文講透!

先楫半導(dǎo)體HPM6E8Y:先楫實時控制芯片驅(qū)動的機器人關(guān)節(jié)“芯”時代

【強勢上新】HPM5E00:EtherCAT運動控制MCU,先楫半導(dǎo)體再拓工業(yè)總線產(chǎn)品新版圖

【強勢上新】HPM5E00:EtherCAT運動控制MCU,先楫半導(dǎo)體再拓工業(yè)總線產(chǎn)品新版圖
重磅更新 | 先楫半導(dǎo)體HPM_SDK v1.9.0 發(fā)布



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論