") 兩分鐘帶你了解步進(jìn)電機(jī)控制的方法
兩分鐘帶你了解步進(jìn)電機(jī)控制的方法

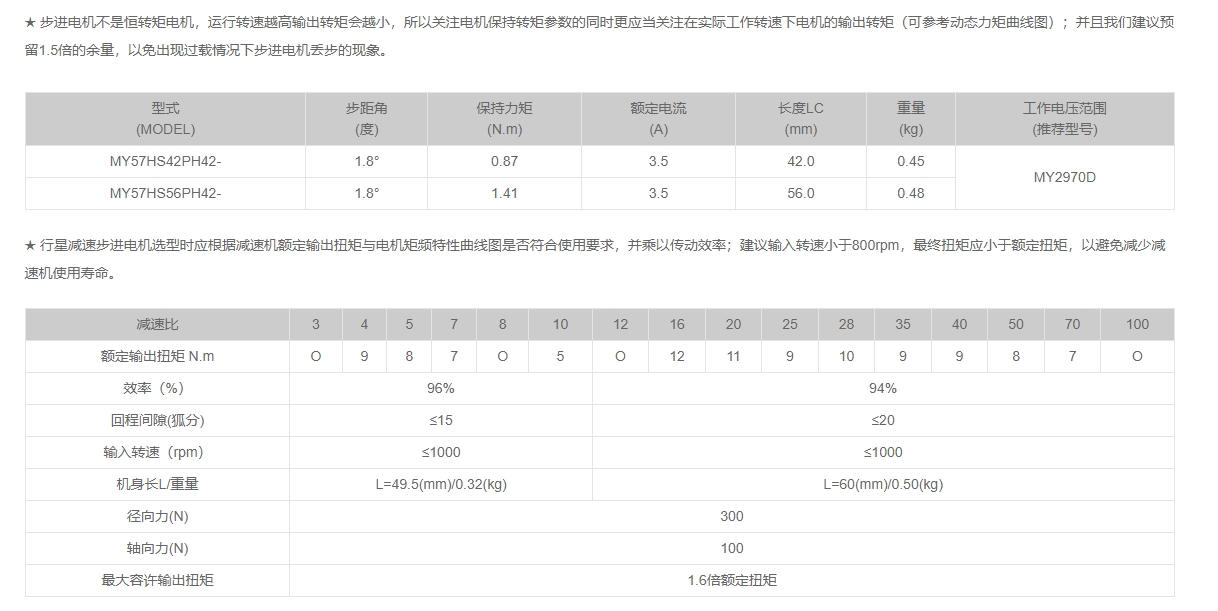
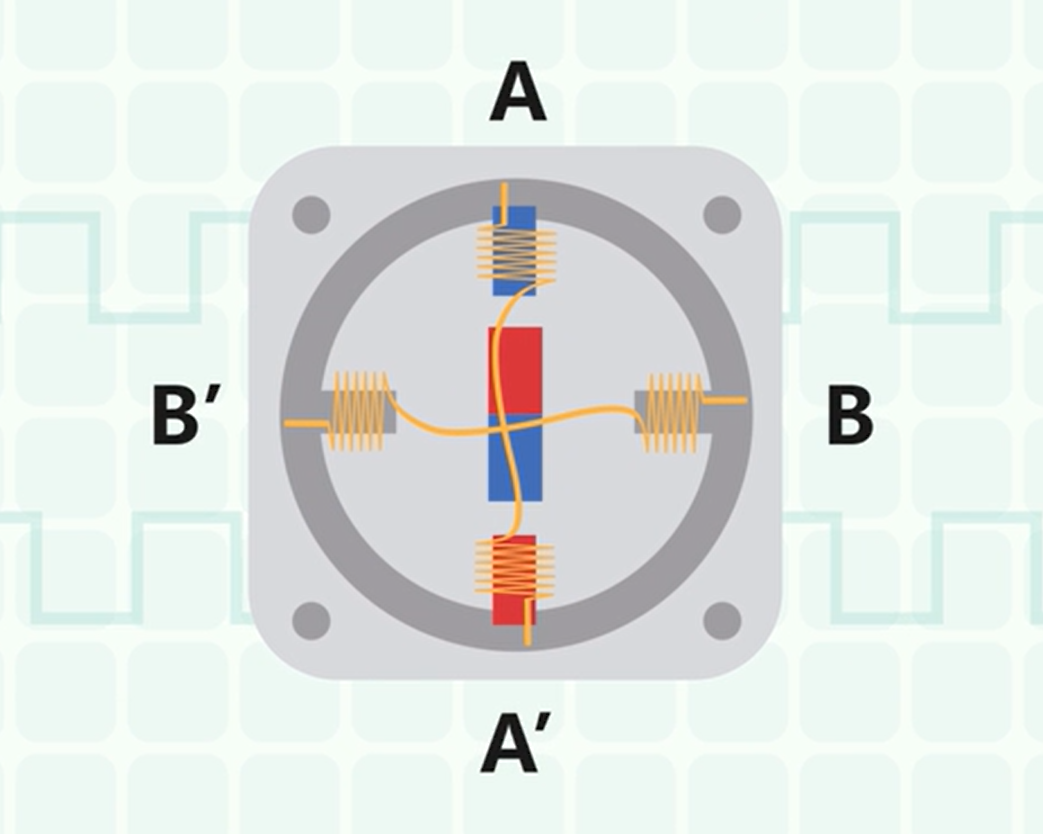
步進(jìn)電機(jī)是一種將電脈沖信號(hào)轉(zhuǎn)換為角位移或線(xiàn)位移的電動(dòng)機(jī)。其工作原理基于電磁學(xué)原理,通過(guò)將電能轉(zhuǎn)換為機(jī)械能來(lái)實(shí)現(xiàn)控制。步進(jìn)電機(jī)控制方法主要包括脈沖控制、?電流控制、?PID控制和?矢量控制等。
?具體控制方法:?
1.?全步進(jìn)控制?:這是最基本的控制方式,每個(gè)脈沖信號(hào)使電機(jī)轉(zhuǎn)動(dòng)一個(gè)完整的步距角,適用于需要高精度定位的應(yīng)用。
2.?半步進(jìn)控制?:在全步進(jìn)控制的基礎(chǔ)上改進(jìn),每個(gè)脈沖信號(hào)使電機(jī)轉(zhuǎn)動(dòng)半個(gè)步距角,轉(zhuǎn)速較快但精度較低。
3.?微步進(jìn)控制?:通過(guò)改變脈沖寬度或相位,使電機(jī)以更小的步距角轉(zhuǎn)動(dòng),適用于高精度和高動(dòng)態(tài)的應(yīng)用。
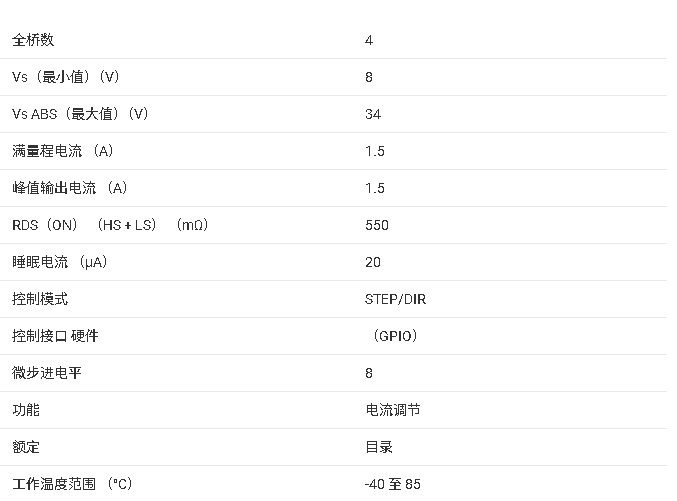
4.?電流控制?:通過(guò)調(diào)節(jié)流過(guò)電機(jī)的電流來(lái)控制轉(zhuǎn)矩和速度,適用于需要平滑轉(zhuǎn)動(dòng)的應(yīng)用。
5.?PID控制?:一種反饋控制方法,通過(guò)測(cè)量實(shí)際位置與目標(biāo)位置之間的誤差來(lái)調(diào)整電機(jī)轉(zhuǎn)矩,適用于復(fù)雜和高動(dòng)態(tài)的應(yīng)用。
6.?矢量控制?:利用電機(jī)數(shù)學(xué)模型優(yōu)化性能,適用于高性能和可靠性要求高的應(yīng)用。 ?
不同控制方法的優(yōu)缺點(diǎn):? 每種控制方法都有其優(yōu)缺點(diǎn)。全步進(jìn)控制精度高但速度慢,半步進(jìn)控制速度較快但精度較低,微步進(jìn)控制精度高但需要復(fù)雜的控制算法,電流控制和PID控制適用于不同需求,矢量控制性能優(yōu)越但實(shí)現(xiàn)復(fù)雜。 ?
應(yīng)用場(chǎng)景和實(shí)例:? 步進(jìn)電機(jī)廣泛應(yīng)用于各種領(lǐng)域,如打印機(jī)、POS機(jī)、醫(yī)療器械和自助售賣(mài)機(jī)等。在家電中,小電流步進(jìn)電機(jī)常用于恒壓控制,而在工業(yè)自動(dòng)化中,則采用專(zhuān)用驅(qū)動(dòng)器進(jìn)行控制。
審核編輯 黃宇
-
步進(jìn)電機(jī)
+關(guān)注
關(guān)注
153文章
3248瀏覽量
152346
發(fā)布評(píng)論請(qǐng)先 登錄
步進(jìn)電機(jī)運(yùn)行任務(wù)參數(shù)調(diào)整方法


什么是EoE?兩分鐘帶你快速了解 #EtherCAT #協(xié)議轉(zhuǎn)換 #EoE行規(guī) #工業(yè)控制
步進(jìn)電機(jī)的控制原理
基于UART通訊控制TMC2208/2209模塊驅(qū)動(dòng)兩相四線(xiàn)步進(jìn)電機(jī)

?DRV8821 雙路步進(jìn)電機(jī)控制器與驅(qū)動(dòng)器技術(shù)文檔總結(jié)
?DRV8711 步進(jìn)電機(jī)控制器技術(shù)文檔總結(jié)

伺服電機(jī)和步進(jìn)電機(jī)的核心區(qū)別

單片機(jī)怎么控制步進(jìn)電機(jī)的
使用 CYW4373,啟動(dòng)后立即進(jìn)行校準(zhǔn),并且每兩分鐘進(jìn)行一次校準(zhǔn),怎么操作?
數(shù)據(jù)采集卡與步進(jìn)電機(jī)
HJ4205步進(jìn)電機(jī)驅(qū)動(dòng)電路詳解
步進(jìn)電機(jī)選型時(shí)必須要了解什么?
兩分鐘帶你了解多功能標(biāo)準(zhǔn)源




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論