") 伺服電機(jī)的工作原理和控制方式
伺服電機(jī)的工作原理和控制方式

伺服電機(jī)的工作原理
伺服電機(jī)是一種能夠?qū)㈦娦盘栟D(zhuǎn)換為精確的機(jī)械運(yùn)動的設(shè)備。它的工作原理基于電磁感應(yīng)原理,通過精確控制電機(jī)的轉(zhuǎn)速和轉(zhuǎn)矩來實(shí)現(xiàn)對機(jī)械系統(tǒng)的精確控制。
1. 基本結(jié)構(gòu)
伺服電機(jī)通常由以下幾個部分組成:
- 定子(Stator) :固定部分,產(chǎn)生磁場。
- 轉(zhuǎn)子(Rotor) :旋轉(zhuǎn)部分,通常由永磁材料制成。
- 編碼器(Encoder) :用于提供轉(zhuǎn)子位置和速度的反饋信號。
- 驅(qū)動器(Driver) :接收控制信號并將其轉(zhuǎn)換為電機(jī)的驅(qū)動電流。
2. 電磁感應(yīng)原理
伺服電機(jī)的工作原理基于法拉第電磁感應(yīng)定律,即當(dāng)導(dǎo)體在磁場中移動時,會在導(dǎo)體中產(chǎn)生電動勢。在伺服電機(jī)中,定子產(chǎn)生旋轉(zhuǎn)磁場,轉(zhuǎn)子在磁場中旋轉(zhuǎn),從而產(chǎn)生轉(zhuǎn)矩。
3. 轉(zhuǎn)矩和轉(zhuǎn)速的控制
伺服電機(jī)的轉(zhuǎn)矩和轉(zhuǎn)速可以通過改變施加在定子繞組上的電流來控制。電流的變化會導(dǎo)致磁場的變化,進(jìn)而影響轉(zhuǎn)子的旋轉(zhuǎn)。
伺服電機(jī)的控制方式
伺服電機(jī)的控制方式主要分為開環(huán)控制和閉環(huán)控制兩大類。
1. 開環(huán)控制
開環(huán)控制是一種簡單的控制方式,它不依賴于系統(tǒng)的反饋信息。在開環(huán)控制中,控制信號直接發(fā)送給電機(jī),而不考慮電機(jī)的實(shí)際運(yùn)動狀態(tài)。
- 優(yōu)點(diǎn) :結(jié)構(gòu)簡單,成本較低。
- 缺點(diǎn) :無法補(bǔ)償系統(tǒng)的非線性和外部干擾,精度和穩(wěn)定性較差。
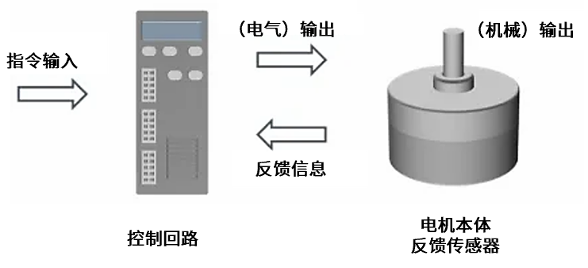
2. 閉環(huán)控制
閉環(huán)控制,也稱為反饋控制,是一種更為精確的控制方式。它依賴于系統(tǒng)的反饋信息來調(diào)整控制信號。
- 優(yōu)點(diǎn) :能夠補(bǔ)償系統(tǒng)的非線性和外部干擾,提高系統(tǒng)的精度和穩(wěn)定性。
- 缺點(diǎn) :結(jié)構(gòu)復(fù)雜,成本較高。
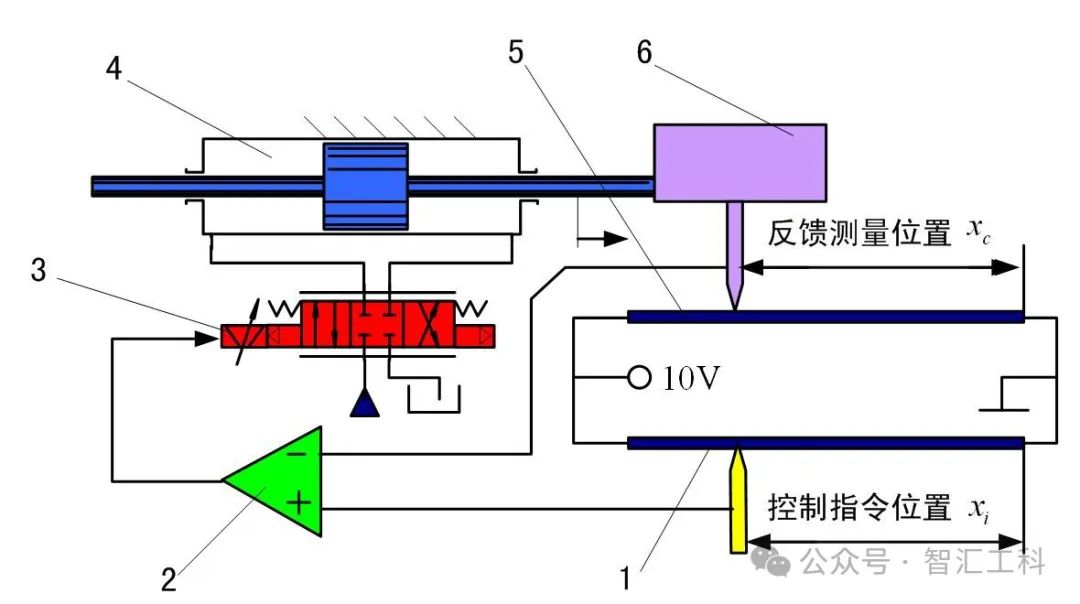
a. 位置控制
位置控制是閉環(huán)控制的一種,它通過編碼器提供的反饋信號來控制電機(jī)的位置。
- 控制策略 :PID控制(比例-積分-微分控制)是最常用的位置控制策略。
- 實(shí)現(xiàn)方式 :通過調(diào)整PID參數(shù),可以實(shí)現(xiàn)對電機(jī)位置的精確控制。
b. 速度控制
速度控制是通過控制電機(jī)的轉(zhuǎn)速來實(shí)現(xiàn)的。
- 控制策略 :同樣可以采用PID控制策略。
- 實(shí)現(xiàn)方式 :通過調(diào)整PID參數(shù),可以實(shí)現(xiàn)對電機(jī)速度的精確控制。
c. 轉(zhuǎn)矩控制
轉(zhuǎn)矩控制是通過控制電機(jī)的轉(zhuǎn)矩來實(shí)現(xiàn)的。
- 控制策略 :轉(zhuǎn)矩控制通常需要更復(fù)雜的控制算法,如模糊控制、自適應(yīng)控制等。
- 實(shí)現(xiàn)方式 :通過調(diào)整控制算法的參數(shù),可以實(shí)現(xiàn)對電機(jī)轉(zhuǎn)矩的精確控制。
伺服電機(jī)的應(yīng)用
伺服電機(jī)因其高精度和快速響應(yīng)的特性,被廣泛應(yīng)用于各種自動化控制系統(tǒng)中,如:
- 工業(yè)機(jī)器人 :用于精確控制機(jī)器人的關(guān)節(jié)運(yùn)動。
- 數(shù)控機(jī)床 :用于控制機(jī)床的切削運(yùn)動。
- 自動化生產(chǎn)線 :用于控制生產(chǎn)線上的各種機(jī)械運(yùn)動。
- 航空航天 :用于控制飛機(jī)和衛(wèi)星的姿態(tài)和軌道。
結(jié)論
伺服電機(jī)的工作原理基于電磁感應(yīng)原理,通過精確控制電機(jī)的轉(zhuǎn)速和轉(zhuǎn)矩來實(shí)現(xiàn)對機(jī)械系統(tǒng)的精確控制。伺服電機(jī)的控制方式包括開環(huán)控制和閉環(huán)控制,其中閉環(huán)控制因其能夠補(bǔ)償系統(tǒng)的非線性和外部干擾,而被廣泛應(yīng)用于需要高精度控制的場合。
-
伺服電機(jī)
+關(guān)注
關(guān)注
88文章
2184瀏覽量
61270 -
電磁感應(yīng)
+關(guān)注
關(guān)注
17文章
854瀏覽量
59776 -
機(jī)械運(yùn)動
+關(guān)注
關(guān)注
1文章
33瀏覽量
8430 -
電信號
+關(guān)注
關(guān)注
1文章
845瀏覽量
21834
發(fā)布評論請先 登錄
PLC怎么控制多臺交流伺服電機(jī)達(dá)到同步工作

交流伺服電機(jī)及其調(diào)速分類和特點(diǎn)

伺服電機(jī)的控制方式簡述

派克Parker防爆伺服電機(jī)與普通伺服電機(jī)的區(qū)別

伺服電機(jī)控制系統(tǒng)的高寬帶電流環(huán)參數(shù)設(shè)計(jì)

伺服電機(jī)和步進(jìn)電機(jī)的核心區(qū)別

舵機(jī)與伺服電機(jī)的區(qū)別是什么?
伺服電機(jī)的三種制動方式有什么區(qū)別?

基于MT6835磁編碼器IC的步進(jìn)電機(jī)全閉環(huán)伺服控制策略
伺服電機(jī)中的回原點(diǎn)方式

正弦波逆變器的工作原理與控制方式
伺服電機(jī)的工作原理、構(gòu)成以及應(yīng)用
伺服電機(jī)測試流程分析
如何應(yīng)對伺服電機(jī)過熱故障?
液壓伺服系統(tǒng)工作原理液及優(yōu)缺點(diǎn)



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論