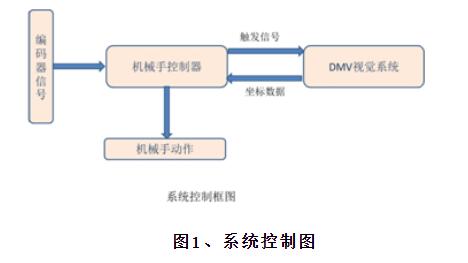
本文設(shè)計并實現(xiàn)了基于機器視覺的機械手裝配系統(tǒng),可在線完成對不同型號和任意擺放工件的裝配任務(wù)。系統(tǒng)主要由機器視覺系統(tǒng)和機械手裝配系統(tǒng)組成。
2020-06-23 10:21:00 4364
4364 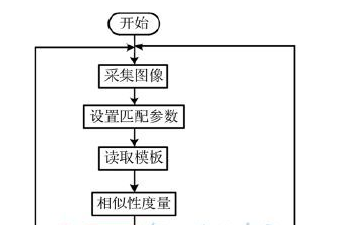
在自動化流水線中,機械手的應(yīng)用比較廣泛,它是集多種工作方式于一身的典型案例。本節(jié)將以機械手自動控制為例,重點講解含多種工作方式的PLC控制系統(tǒng)的設(shè)計。
2023-12-07 11:36:4110014 
Delta并聯(lián)機械手視覺識別后如何在流水線進行物料的同步分揀。
2024-07-03 09:52:182108 
為了展示“基于FPGA的AI,機器視覺,運動控制”,Enclustra打造了機械手和人互動玩石頭剪刀布的demo。
2021-05-17 17:03:342604 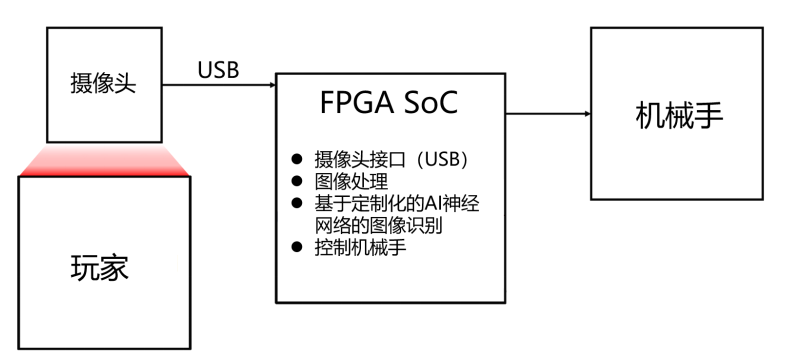
3自由度自動控制機械手,試用好使!希望可以幫助到大家
2014-09-11 15:55:50
自動化生產(chǎn)線和機器人自動化生產(chǎn)線的區(qū)別主要表現(xiàn)在以下幾個方面。安裝方式: 機器人線在地面安裝, 與壓力機沒有機械上的連接; 機械手線在壓力機立柱間安裝鋼梁, 附著在壓力機上。使用特點:機器人線通過端拾器
2018-11-26 11:59:28
中心,機械手可以快速地將包裹從傳送帶上分揀到不同的區(qū)域,以便進行后續(xù)的配送。
倉儲管理 :在倉儲管理中,機械手 OEM 可以與倉儲管理系統(tǒng)相結(jié)合,實現(xiàn)貨物的自動存儲和取出。它能夠根據(jù)系統(tǒng)的指令,將貨物
2024-09-18 10:31:15
` 隨著科技的發(fā)展,很多行業(yè)開始向自動化技術(shù)轉(zhuǎn)變。以前很多加工制造的工作都是由大量的人手來完成,現(xiàn)在則用機械手、機器人等一些自動化設(shè)備來代替。 作為近幾十年發(fā)展起來的一種高科技自動化生產(chǎn)設(shè)備,工業(yè)
2012-09-21 09:33:00
開篇:機械手設(shè)計挑戰(zhàn)——仿人機器人設(shè)計領(lǐng)域上的高峰
2019-07-24 15:25:54
注塑機機械手的驅(qū)動系統(tǒng)一般可分為液壓驅(qū)動,氣壓驅(qū)動和電力驅(qū)動等三類,也可以根據(jù)工作要求采用上述三種類型的組合系統(tǒng)來完成驅(qū)動。在設(shè)計選用驅(qū)動系統(tǒng)時應(yīng)注意以下幾點: (1) 根據(jù)機械手的負載量來確定
2012-09-10 09:51:04
用Labview怎么控制機械手動作,有沒有這方面學(xué)習(xí)的視頻或資料
2018-04-18 15:33:20
的破損。鑒于上述問題,四元數(shù)研發(fā)了PCB視覺對位沖床機械手系統(tǒng)是為實現(xiàn)PCB板堆疊放料、自動上料、自動進烤箱、CCD自動掃描定位,機械臂自動校位掛釘上板,沖床沖板,自動堆疊下料而開發(fā)的一體化方案,集視覺
2020-07-01 10:22:06
對齊疊放,該方法不僅效率低下,而且操作人員勞動強度大,易導(dǎo)致原料板的破損。四元數(shù)PCB視覺對位沖床機械手系統(tǒng)是為實現(xiàn)PCB板堆疊放料、自動上料、自動進烤箱、CCD自動掃描定位,機械臂自動校位掛釘上板
2021-04-27 09:49:47
哪位大神知道怎樣用labview視覺測量物體的位置,用機械手去抓,謝謝了!
2017-05-19 14:33:56
關(guān)于機器視覺的,讀取臺達DMV1000的數(shù)據(jù)
2014-08-19 08:34:46
報名地址點擊報名
直播簡介
1.了解機械手視覺引導(dǎo)的應(yīng)用場景
2.了解scara機器人運動學(xué)正逆解
3.了解相機畸變矯正方法
4.了解手眼標定-9點標定方法
5.了解機械手旋轉(zhuǎn)中心標定方法
6.了解
2023-10-17 15:37:40
我又帶著問題來了 LabVIEW和機械手通信設(shè)備總是要有個暫停和繼續(xù)運行的按鈕我界面做了個暫停按鈕,可是這個暫停按鈕只暫停機械手的程序,并不暫停labview的程序。暫停的時候我labview
2021-06-21 10:40:49
人復(fù)位后切斷電源,以免機器人突然啟動誤傷工人。本文出自力泰科技轉(zhuǎn)載請注明出處關(guān)鍵詞:桁架機器人 直角坐標機器人 龍門式機器人 南京桁架機器人 桁架機械手 上下料桁架機械手臂 沖壓上下料機械手 桁架機械手系統(tǒng) 三坐標桁架機器人 高精度桁架機械臂 全自動桁架機械手 數(shù)控車床機器人 數(shù)控機床機械手`
2018-08-08 14:34:35
穩(wěn)定性好、速度快、精度高的特點,能增強作業(yè),保證生產(chǎn)效率。7、桁架機械手可以以被用于惡劣的環(huán)境,也可不間斷地工作,簡便的構(gòu)造使其便于操作和維修。8、桁架式機械手的控制系統(tǒng)不僅能對自身進行智能檢測,還具有自動報警等功能。機械手在一定范圍內(nèi)可被任意組合,以實現(xiàn)對車床等更多設(shè)備的自動化生產(chǎn)線。`
2020-11-25 15:24:58
` 本帖最后由 3010203109 于 2013-11-14 18:09 編輯
啤酒生產(chǎn)線介紹:機械手抓瓶視頻:啤酒生產(chǎn)線六自由度機械手抓瓶控制系統(tǒng)設(shè)計:任務(wù)要求裝箱工藝主要分為2個部分:視覺
2013-11-14 12:04:29
視覺系統(tǒng)運行原理及工作方式,希望可以幫助到大家。深圳四元數(shù)數(shù)控致力于運動控制、圖像與視覺傳感等工業(yè)自動化技術(shù)的研發(fā)和應(yīng)用,產(chǎn)品廣泛應(yīng)用于印刷設(shè)備、模切設(shè)備、貼合設(shè)備、多軸數(shù)控設(shè)備、機械手、電子加工和檢測設(shè)備、激光加工設(shè)備、拋光機械生產(chǎn)自動化等工業(yè)控制領(lǐng)域。
2020-05-27 14:33:42
如何對機械手進行組裝并且調(diào)試呢?
2022-01-20 07:05:01
遠程操控仿生機械手抓取實物。仿生機械手控制系統(tǒng)硬件設(shè)計仿生機械手控制系統(tǒng)硬件設(shè)計圖數(shù)據(jù)手套軟件控制設(shè)計 ...
2022-01-07 06:55:18
機械手是一種能模仿人手和臂的某些動作功能,用以按固定程序抓取、搬運物件或操作工具的自動操作裝置。特點是可以通過編程來完成各種預(yù)期的作業(yè),構(gòu)造和性能上兼有人和機械手機器各自的優(yōu)點。驅(qū)動機構(gòu)機械手所用
2021-07-01 07:04:52
`注塑機機械手的所有動作都在控制系統(tǒng)的指揮下完成,尤其是機械手與注塑機的協(xié)調(diào)工作關(guān)系,更是要依賴控制系統(tǒng)來達到。在控制系統(tǒng)的指揮下,機械手按照預(yù)定的工作程序完成各個動作,從而將注塑生產(chǎn)出的制品從模具
2012-09-11 09:43:54
的測量,如孔位到孔位的距離等。4.機械手引導(dǎo)。輸出空間坐標引導(dǎo)機械手精確定位等。隨著機器視覺技術(shù)的不斷改進完善,能實現(xiàn)的功能也越來越多,適用的行業(yè)也更廣泛,將會給工業(yè)生產(chǎn)帶來更多優(yōu)勢。四元數(shù)致力于運動控制
2020-11-11 10:07:06
的裝配精度,不便于將產(chǎn)品的精度穩(wěn)定地控制在所需的精度范圍內(nèi)。因而,當組裝效率和裝配精度均需要提升時,人工裝配的方式便于實現(xiàn)效率和精度之間的平衡。四元數(shù)機械手視覺分揀系統(tǒng)應(yīng)用于手機蓋板,末端工位識別抓取
2021-05-18 09:40:06
體的部件分揀和裝配都是靠人工完成的,耗費人力、物力和時間,同時效率低下。四元數(shù)針對上述問題及技術(shù)需求,研發(fā)了一種基于機器視覺的機械手視覺分揀系統(tǒng),該系統(tǒng)可以實現(xiàn)部件的自動分揀,提高效率。四元數(shù)機械手視覺
2021-09-22 15:33:10
裝夾;3、有CCD檢測相機,精準定位;4、產(chǎn)品合格率的提高,傳統(tǒng)沖壓都是人工放料,可能擺放不到位,造成沖壓后產(chǎn)品不良,本設(shè)備是自動上料,并且有CCD對位和角度旋轉(zhuǎn),可以調(diào)整產(chǎn)品角度,直至正沖壓位。以上就是深圳四元數(shù)小編給你們介紹的深圳FPC視覺對位沖床機械手系統(tǒng)有哪些特點,希望大家看后有所幫助!
2021-09-26 15:12:08
。鑒于上述問題,四元數(shù)研發(fā)了PCB視覺對位沖床機械手系統(tǒng)是為實現(xiàn)PCB板堆疊放料、自動上料、自動進烤箱、CCD自動掃描定位,機械臂自動校位掛釘上板,沖床沖板,自動堆疊下料而開發(fā)的一體化方案,集視覺對位
2021-09-25 14:47:16
勞動強度的增加,容易產(chǎn)生工傷事故,效率也比較低下,且使用人工上下料的產(chǎn)品質(zhì)量的穩(wěn)定性不夠,不能滿足大批量生產(chǎn)的需求。使用四元數(shù)研發(fā)的上下料機械手系統(tǒng)就可以很好的解決上述問題,該系統(tǒng)采用ARM9+FPGA
2021-09-27 14:51:00
運動控制、圖像與視覺傳感等工業(yè)自動化技術(shù)的研發(fā)和應(yīng)用,產(chǎn)品廣泛應(yīng)用于印刷設(shè)備、模切設(shè)備、貼合設(shè)備、多軸數(shù)控設(shè)備、機械手、電子加工和檢測設(shè)備、激光加工設(shè)備、拋光機械生產(chǎn)自動化等工業(yè)控制領(lǐng)域。
2021-08-12 10:28:21
四元數(shù)關(guān)節(jié)式機械手系統(tǒng)是由多個關(guān)節(jié)組成,以軸與軸之間的多自由度轉(zhuǎn)動作為運動軌跡的一種自動化機器人。它是國內(nèi)較早出現(xiàn)的一批機械手,多應(yīng)用于原子能工業(yè)中,后來在汽車制造業(yè)、注塑業(yè)應(yīng)用的最為廣泛,也是目前
2021-10-21 13:46:57
關(guān)節(jié)式機械手是一種適用于靠近機體操作的傳動形式。它像人手一樣有肘關(guān)節(jié),可實現(xiàn)多個自由度,動作比較靈活,適于在狹窄空間工作。四元數(shù)關(guān)節(jié)式機械手系統(tǒng)采用 linux操作系統(tǒng),全工業(yè)級設(shè)計,上位機
2021-08-13 09:56:19
視覺分揀機械手是工廠自動化立體倉庫及物流配送中心對物流進行分類、整理的關(guān)鍵設(shè)備之一,通過應(yīng)用分揀機可實現(xiàn)物流中心準確、快捷的工作。因此,在快遞行業(yè)他被譽為“智能機器手”。四元數(shù)視覺分揀機械手系統(tǒng)
2021-08-11 09:43:18
哪位大俠那里有愛普生機械手的資料啊!
2014-04-11 20:36:53
五軸機械手主臂的負載慣量是如何去計算的?五軸機械手主臂的負載轉(zhuǎn)矩是如何去計算的?
2021-06-28 09:17:36
請問用STM32板子怎樣去控制一個機械手系統(tǒng)啊?
2017-03-09 21:15:24
PLC機械手控制的實現(xiàn)二、設(shè)計要求:1. 闡述機械手的工作原理2. 如何實現(xiàn)PLC對機械手的控制3. 機械手控制程序設(shè)計第一節(jié) 機械手的工作原理1.1 機
2008-12-13 14:15:22 379
379 基于PLC控制系統(tǒng)的平面噴涂機械手摘要:本文論述了一套平面噴涂機械手裝置的設(shè)計過程。該系統(tǒng)由機械部分和控制部分構(gòu)成,機械部分包括大臂、小臂、氣缸等;控制部分采
2009-05-15 01:01:0359 基于現(xiàn)場總線的開放結(jié)構(gòu)機械手控制系統(tǒng)是目前機械手控制的發(fā)展方向。文章通過對物料搬運機械手裝置及其控制系統(tǒng)的介紹,提出了基于CAN 總線的機械手控制系統(tǒng)方案,分析了
2009-06-03 09:10:2928 本文論述了基于PLC 機械手與冷卻箱組合裝置的功能、組成、原理。文中介紹了PLC 的選擇,依據(jù)生產(chǎn)工藝流程給出了PLC 控制的I/O 分配圖、程序框圖。關(guān)鍵詞:PLC;機械手與冷卻箱
2009-08-22 08:30:3710 機械手資料
mechanical hand, 也被稱為自動手,auto hand 能模仿人手和臂的某些動作功能,用以按固定程序抓取、搬運物件或操作工具的自動操作裝置
2010-03-31 14:57:24286 智能控制器在機器人機械手位置控制中的應(yīng)用
以JJR-1型教學(xué)機器人為基礎(chǔ)描述了智能控制器在機械手定位控制中的應(yīng)用。對機器人機械手的肴關(guān)節(jié)進行了測試
2010-04-02 10:51:4531 控制要求:機械手一個工作周期可分為八步:第一步是當左工作臺上有工件出現(xiàn)時,I1.5=1,機械手開始下降,下降到位時,I0.5=1,停止下降,第一步結(jié)束。第二步是機械手
2010-07-08 12:35:5466 摘要:以JJR-1型教學(xué)機器人為基礎(chǔ)描述了智能控制器在機械手定位控制中的應(yīng)用。對機器人機械手的肴關(guān)節(jié)進行了測試與折算,給出了其數(shù)學(xué)模型。在此基礎(chǔ)上提出了采用模糊控制器
2010-08-25 11:15:5761 實驗 機械手的PLC的自動控制一.實驗?zāi)康?. 掌握機械手步進控制程序設(shè)計2. 進一
2008-09-30 12:27:205741 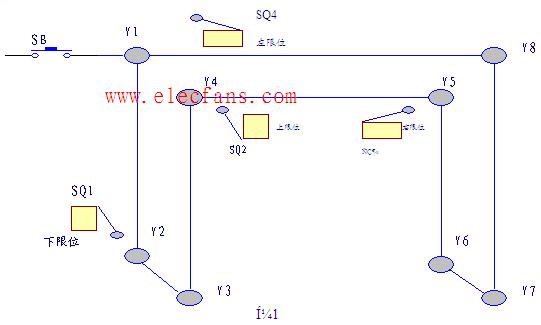
機械手行車控制電路
2009-02-09 16:13:081643 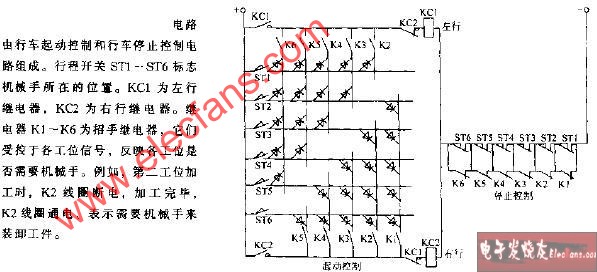
PLC在機械手控制系統(tǒng)上的應(yīng)用
機械手在工業(yè)生產(chǎn)中得到廣泛的應(yīng)用,傳統(tǒng)工藝中采用繼電器控制時,需要的繼電器多,接線復(fù)雜,因 此
2009-06-17 13:35:4710649 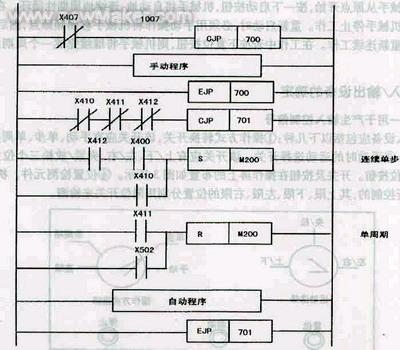
PLC在機械手步進控制中的應(yīng)用
機械手是工業(yè)自動控制領(lǐng)域中經(jīng)常遇到的一種控制對象。機械手可以完成許多工作,如搬物、裝配、切割
2009-06-19 14:11:082256 
提醒廣大機械手用戶朋友,在拆除機械手的時候,應(yīng)注意以下步驟: 1.關(guān)掉射出機電源。 2.關(guān)掉機械手電源。 3.關(guān)掉機械手氣壓源。 4.洩除空壓。 5.放
2010-07-28 09:51:234323 通過對物料搬運機械手裝置結(jié)構(gòu)與功能的介紹,提出了一種電氣伺服和氣動伺服相結(jié)合的混合驅(qū)動機械手結(jié)構(gòu)類型,重點分析了基于45, 的機械手控制系統(tǒng)組成,并詳細論述了以45, 為核
2011-08-15 17:49:36101 基于PLC的機械手控制設(shè)計(畢業(yè)設(shè)計)基于PLC的機械手控制設(shè)計(畢業(yè)設(shè)計)
2015-11-13 11:21:000 機器人機械手畢業(yè)設(shè)計論文模板機器人機械手畢業(yè)設(shè)計論文模板
2016-03-07 11:55:1132 本資料介紹了拓斯達機械手的操作和設(shè)置方法!
2016-06-23 17:56:19231 相對傳統(tǒng)的機器人專用控制器控制方式,基于PC的運動控制卡控制具有成本低、開發(fā)自由度高、與行業(yè)應(yīng)用更加匹配等優(yōu)勢。領(lǐng)略數(shù)控具備寫機械手路徑控制的能力,應(yīng)用研華PCI-1245-AE運控卡實現(xiàn)了對SCARA機械手的運動控制。
2017-09-30 15:59:4422 東芝機械手手動控制示教操作
2017-10-20 10:23:527 機械手設(shè)計必看
2018-02-01 15:14:5483 基于PLC的機床上料機械手由行車卡爪、連接分度盤及機械手卡爪組成。其控制系統(tǒng)設(shè)計選用基于PLC的自動化控制系統(tǒng)。基于PLC的機床上料機械手首要功能便是裝載,裝載過程如下:行車行進過程中定位,行車卡爪
2018-02-06 17:38:048 電轉(zhuǎn)(DENSO)工業(yè)機器人VMG系列機械手概述
2018-02-28 16:31:3228 平臺機械手定位方法;設(shè)計了可重復(fù)利用、驅(qū)一動分離的自動化、低成本高鐵車廂預(yù)裝配柔性實驗平臺機械手;通過ANSYS有限元分析T具對機械手關(guān)鍵零部件的強度進行了分析,驗證了機械手結(jié)構(gòu)的安全可靠性,獲得了機械手的優(yōu)化結(jié)
2018-03-20 17:59:270 機械手的工作方式分為手動或自動狀態(tài)。手動由本工作站的控制按鈕控制,自動采用串行通信接收上位機命令,并控制本位的機械手動作。若起動后機械手沒有在初始位置,則機械手應(yīng)先回到初始位置,系統(tǒng)初始化見圖6所示。隨后,系統(tǒng)接受指令,按照指令要求運行,程序流程見圖7所示。
2018-08-10 17:03:404585 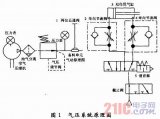
機器人分為可獨立行走的人形機器人、工業(yè)用機械手、家用清潔機器人等諸多種類。其中最為常用的,就是面向制造現(xiàn)場的工業(yè)用機械手。下面將介紹各行各業(yè)的機械手應(yīng)用案例。
2018-08-17 08:00:008 分類。 按驅(qū)動方式可分為機械式機械手、液壓式機械手、氣動式機械手和電動式機械手等。 按搬運重量可分為微型機械手、小型機械手、中型機械手和大型機械手等; 按坐標型式可分為直角坐標式機械手、圓柱坐標式機械手、極坐標式
2021-02-24 15:12:551019 人的基礎(chǔ)上專門做噴涂類的機器人,又叫噴涂機械手海智在噴涂行業(yè)有做噴涂、噴漆、噴粉、噴釉、噴砂、噴油、熱噴涂等案例一般使用6軸機械手需要配套的一些自動噴槍、供漆供粉系統(tǒng)等進行自動噴涂使用、有的需要增加其它
2018-11-29 09:04:161756 設(shè)定方位。 二、數(shù)控機床機器人控制系統(tǒng)隨著新材料、新工藝、新技術(shù)的發(fā)展,推動各種了自動化機械手向機電一化和智能化方向的快速發(fā)展。數(shù)控車床機械手是一種模擬人手操作的自動機械,它可按固定程序抓取﹑搬運物件
2018-12-05 15:04:313170 山東康道智能資訊:桁架機器人機械手之手臂解說,桁架機器人的手臂是機加工自動化生產(chǎn)線的重要組成部分,很多時候,定制的是桁架機器人的手臂部分,因為手臂是用來執(zhí)行人工操作的部分。 一、桁架機器人機械手之手
2018-12-20 16:11:081018 本文檔的主要內(nèi)容詳細介紹的是臺達工業(yè)機器人四軸機械手DRS系列電控手冊主要內(nèi)容包括了:1 產(chǎn)品說明 ,2 安裝,3 配線及接頭說明,4 電池更換,5 硬體元件,6 異警排除說明
2019-01-09 08:00:0017 山東康道智能資訊:數(shù)控機床機械手控制系統(tǒng)解說,山東康道智能的數(shù)控機床機器人機械手采用的是自主研發(fā)的控制系統(tǒng)。一、數(shù)控機床機械手控制系統(tǒng)解說數(shù)控機床機器人的全部動作都在操控系統(tǒng)的指揮下來進行的,特別是
2019-01-11 15:31:151583 加工的功能。數(shù)控機床機器人機械手適合于軸、盤類以及異形零件的自動上下料。還可以根據(jù)不同工件的形狀和要求配置不同的夾爪和供料、排料自動化系統(tǒng)。 二、小編總結(jié)數(shù)控機床機器人機械手采用伺服驅(qū)動、直線導(dǎo)軌導(dǎo)向
2019-01-16 16:51:591621 山東康道智能資訊:桁架機器人機械手價格是多少?購買桁架機器人機械手除了對性能質(zhì)量在乎,對桁架機器人價格也是極為在乎的。一、桁架機器人機械手價格是多少?桁架機器人機械手價格是多少?你會發(fā)現(xiàn)每個桁架
2019-01-25 14:48:492773 首先講一下在工業(yè)應(yīng)用中,手和眼(攝像機)的兩種位置關(guān)系,第一種是將攝像機(眼)固定在機械手(手)上面,眼隨手移動;第二種是攝像機(眼)和機械手(手)分離,眼的位置相對于手是固定的
2019-05-07 16:18:107435 針對目前國內(nèi)自動化生產(chǎn)廠家對高精度、高性價比插件機的迫切需求,在分析了常見的插件機基本工作過程的基礎(chǔ)上,利用機械手和視覺技術(shù)構(gòu)建了基于機器視覺的高精度插件系統(tǒng)。在利用九點標定方法完成系統(tǒng)標定的基礎(chǔ)上
2019-09-06 15:16:279 機械手是一種能自動化定位控制并可重新匯編程序以變動的多功能機器。它有多個自由度,可用來搬運物體以完成在各個不同環(huán)境中的工作。工業(yè)機械手是近似自動控制領(lǐng)域中出現(xiàn)的一項新技術(shù),并已成為現(xiàn)代制造生產(chǎn)系統(tǒng)中的一個重要組成部分。
2020-05-17 09:19:071818 實現(xiàn)機床裝卸自動化的方法有兩種:桁架機械手和關(guān)節(jié)機器人。在過去,我們看到了更多的桁架機械手。有人說,自動裝卸的難點在于工作站的布局,即生產(chǎn)線的規(guī)劃。許多公司要求緊湊型生產(chǎn),最常見的是U型和圓盤型
2020-12-27 10:14:553821 20多年來,機器視覺的開創(chuàng)者們一直在預(yù)測什么時候能夠出現(xiàn)可以從零件箱中任意揀選零件的機械手。也就是說利用機
2021-03-26 10:51:292856 制造業(yè)現(xiàn)在大力開展工業(yè)自動化,全自動碼垛機械手推動傳統(tǒng)制造業(yè)自動化水平提升發(fā)揮著不可忽視的作用,使制造業(yè)廠家生產(chǎn)效率進一步提升。全自動碼垛機械手又稱機械手、碼垛機器人、自動搬運碼垛設(shè)備、堆垛機、垛碼機等,它
2021-05-27 14:58:142102 碼垛機械手臂主要由執(zhí)行機構(gòu)、驅(qū)動機構(gòu)和控制系統(tǒng)三大部分組成。高速碼垛機器人機械手臂是一種多自由度的全自動關(guān)節(jié)式機械手,其機械系統(tǒng)主要由4個關(guān)節(jié)部分組成能實現(xiàn)4種運動,基座旋轉(zhuǎn)、連桿結(jié)構(gòu)的手臂結(jié)構(gòu)前后和上下運動、手腕回轉(zhuǎn)動作與手爪的伸縮和抓取運動并由交流伺服電機驅(qū)動。
2021-08-23 16:44:492370 全自動碼垛機械手能模仿人手和臂的某些動作功能,用以按固定程序抓取、搬運物件或操作工具的自動操作裝置。全自動碼垛機械手是較早出現(xiàn)的工業(yè)機器人
2021-11-05 15:51:031680 手動機械手程序資料
2021-12-08 09:20:423 機械手是可以實現(xiàn)搬運的裝備,近年逐漸受到眾多企業(yè)的青睞而不斷提升,目前還可為其構(gòu)建機械手微操作力系統(tǒng),使用微操作力控制機械手有什么優(yōu)勢? 傳統(tǒng)的物料搬運設(shè)備在有效性、精確性和安全性等方面的作用非常
2022-04-08 15:30:091721 工業(yè)機械手是輔助用于自動化生產(chǎn)設(shè)備作業(yè)的一種替代人工的裝置,可以通過編程來控制設(shè)備的運行,按照設(shè)定好的程序?qū)崿F(xiàn)預(yù)期作業(yè),在注塑、機床、碼垛等自動化生產(chǎn)場景中有著廣泛的應(yīng)用。而實現(xiàn)機械手作業(yè)要依靠專用
2022-10-10 15:52:061863 機械手分為:4軸,6軸或者XY模組或UVW模組。相關(guān)的視覺引導(dǎo)項目主要包括:抓取,放置,位置補正,貼合。
2022-10-11 15:44:433490 電子發(fā)燒友網(wǎng)站提供《使用EMG的機械手控制.zip》資料免費下載
2022-11-07 11:02:5010 電子發(fā)燒友網(wǎng)站提供《基于視覺的自動駕駛拾放機器人.zip》資料免費下載
2022-11-28 09:43:190 的拆包機械手其工藝流程和系統(tǒng)組成為: 工藝流程: 自動拆垛機器人+齒刀破包器流程 1.相機支架攜帶3D視覺到達滿垛盤正上方。 2.通過3D視覺識別出垛盤的形狀和位置。 3.3D視覺把垛型數(shù)據(jù)傳遞給機器人。 4.機器人按照傳來的數(shù)據(jù)進行運
2023-02-28 11:51:47720 平面關(guān)節(jié)型機械手設(shè)
2023-05-29 11:11:331 本文系統(tǒng)設(shè)計由開發(fā)者針對目前的一些上肢肢體不健全、自主進食有困難的特殊群體,所提出的一款輔助進食的服務(wù)型桌面機械手控制系統(tǒng),以語音、機器視覺等傳感器技術(shù)為機器人提供人機交互的接口以及系統(tǒng)的反饋接口
2022-02-18 10:09:441529 
全自動拆包機械手 常見的PP、PE、PVC塑料顆粒通常是由人工進行破包上料,為題升自動化水平減少人工成本,很多企業(yè)開始用拆包機械手進行這一作業(yè),拆包機械手是由機器人拆垛系統(tǒng)、包裝袋輸送系統(tǒng)、上袋機
2023-08-03 10:48:211602 
直線模組是一種常見的機械傳動裝置,廣泛應(yīng)用于機械手等自動化設(shè)備中,在機械手中的主要作用是實現(xiàn)機械手的運動控制和定位。
2023-12-07 17:38:281556 
ZR機械手:工業(yè)自動化的新選擇-速程精密 隨著工業(yè)自動化的不斷發(fā)展,越來越多的企業(yè)開始尋求更高效、更精準的自動化解決方案。速程精密成功研發(fā)的ZR機械手,作為一種新型的工業(yè)自動化設(shè)備,正在成為許多企業(yè)
2023-12-19 18:16:032461 ZR機械手:技術(shù)升級,推動產(chǎn)業(yè)變革 隨著科技的飛速發(fā)展,自動化設(shè)備在各個產(chǎn)業(yè)領(lǐng)域中的應(yīng)用越來越廣泛。作為自動化設(shè)備的重要組成部分,機械手在提高生產(chǎn)效率、保證產(chǎn)品質(zhì)量、降低勞動成本等方面發(fā)揮
2024-01-11 09:21:591245 ZR機械手:實現(xiàn)高效、精準、安全的自動化生產(chǎn) 隨著科技的飛速發(fā)展,自動化生產(chǎn)已成為制造業(yè)轉(zhuǎn)型升級的關(guān)鍵。在這個過程中,ZR機械手以其卓越的性能和創(chuàng)新的技術(shù),成為了實現(xiàn)高效、精準、安全的自動
2024-01-19 18:16:411799 手眼標定是機器視覺與機器人結(jié)合應(yīng)用的核心,它解決了相機(眼)與機械手(手)之間的坐標轉(zhuǎn)換關(guān)系。
2024-04-22 12:34:043604 
隨著工業(yè)自動化技術(shù)的飛速發(fā)展,機械手作為現(xiàn)代制造業(yè)中不可或缺的重要設(shè)備,其智能化、自動化水平不斷提高。在機械手控制系統(tǒng)中,PLC(可編程邏輯控制器)因其可靠性高、編程簡單、功能強大等優(yōu)點,被廣泛應(yīng)用
2024-06-17 10:46:003550 機器視覺控制機械手是一種將機器視覺技術(shù)與機械手控制技術(shù)相結(jié)合的自動化技術(shù)。它通過機器視覺系統(tǒng)獲取目標物體的圖像信息,然后利用圖像處理技術(shù)對圖像進行分析和處理,從而實現(xiàn)對機械手的精確控制。以下是機器
2024-07-04 10:40:121783 機器視覺運動控制一體機在DELTA并聯(lián)機械手視覺上下料的應(yīng)用
2024-10-24 09:02:481714 
正運動DELTA機械手多物料視覺分揀解決方案
2025-06-24 11:16:47696 
 電子發(fā)燒友App
電子發(fā)燒友App









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論