業界透露,臺積電在新任CTO人選上沒有從內部拔擢,而是意外地向外借將,由在學術界擁有高度知名的美國斯坦福教授黃漢森(Philip Wong)出任。
2018-08-02 11:24:12 9669
9669 斯坦福 CG635 供應 CG635 時鐘發生器 歐陽R:*** QQ:1226365851回收工廠或個人、庫存閑置、二手儀器及附件。長期 專業銷售、維修、回收 高頻 二手儀器。溫馨提示:如果您
2019-06-16 12:07:43
深度學習斯坦福cs231n編程作業#1 --- k近鄰算法(k-NN)
2020-05-07 12:03:37
導致起火。開發電池的斯坦福教授 在斯坦福開發的新電池中,研究人員采用聚乙烯薄膜材料,薄膜上嵌入了鎳磁粉,它會形成納米級的突起。研究人員在突起部分覆蓋石墨烯導電材料,讓電流可以從表面通過。當溫度
2016-01-12 11:57:19
斯坦福機器學習公開課筆記 一 --單變量線性回歸
2020-06-11 13:53:59
開始這類試驗,以實現人機共同協作。“這些都將給未來互聯網社會的發展帶來更大想象空間”。在此趨勢下,搬運機器人將進一步“進化”,在更多領域發揮著更大的作用。`
2015-12-23 14:40:03
將在機械上超越人類的身體,在數字上超越人類的頭腦。如果未來機器人真的具有(或部分具有)超人類的能力,那接下來的問題當然不是機器人和人類誰統治誰那么簡單的問題。在一個充斥著機器人的世界里,我們人類的生活
2015-12-29 14:56:59
機器人技術不再是未來的幻想,它已經進入了我們的日常生活。但在這一領域,我們缺乏相應的法律法規。比如無人機,現在由美國聯邦航空管理局( FAA)來管理,但很多人認為,這完全越權了;比如機器人手
2015-01-13 16:39:57
。 1、自由度 機器人具有的獨立坐標軸運動的數目。機器人的自由度是指確定機器人手部在空間的位置和姿態時所需要的獨立運動參數的數目。手指的開、合,以及手指關節的自由度一般不包括在內。.機器人的自由度
2017-08-15 14:00:52
DG645 斯坦福 SRS DG645 延遲發生器 現金回收 歐陽R:*** QQ:1226365851溫馨提示:如果您找不到聯系方式,請在瀏覽器上搜索一下,旺貿通儀器儀回收工廠或個人、庫存閑置
2022-01-11 10:08:52
設計的醫療康復機器人手臂控制系統,具有杰出的功耗控制和電機控制的高級定時器,能產生3對可配置并互補輸出的PWM信號。通過在Simulink上建立雙閉環PID算法模型,得到合適的PID參數來改變PWM波
2018-08-22 09:31:22
通訊SoC后,積極投入研發EtherCAT協作型機器人產品應用技術。為了加速客戶導入工業以太網EtherCAT通信技術,亞信電子今天推出AxRobot EtherCAT七軸助力控制機器手臂解決方案
2021-06-23 17:10:33
供應 現貨 CG635 斯坦福 時鐘發生器 歐陽R:*** QQ:1226365851溫馨提示:如果您找不到聯系方式,請在瀏覽器上搜索一下,旺貿通儀器儀回收工廠或個人、庫存閑置、二手儀器及附件。長期
2020-08-18 09:08:58
之前下載了斯坦福2015年的CNTFET VS model,是.va的文件,不知道怎么用啊,該怎么通過cadence的pspice進行仿真啊,求指點
2018-01-26 13:47:28
求助,哪位大神能找到斯坦福EE214B/314A授課視頻資源?
2021-06-22 07:41:41
回收FS725,二手FS725斯坦福收售曾S/***(同微)QQ:3140751627(同微)koukou:三一四零七五一六二七(同微)產品名稱:臺式銣鐘產品型號: FS725產品品牌: SRS
2021-12-07 09:18:16
回收新舊 斯坦福SRS DG645 延遲發生器 歐陽R:*** QQ:1226365851溫馨提示:如果您找不到聯系方式,請在瀏覽器上搜索一下,旺貿通儀器儀回收工廠或個人、庫存閑置、二手儀器及附件
2021-07-14 10:34:14
手術機器人系統的工作原理是什么?如何去實現一種基于傳感器的機器人手術系統設計?
2021-09-28 08:46:20
移動機器人是機器人的重要研究領域,人們很早就開始移動機器人的研究。世界上第一臺真正意義上的移動機器人是斯坦福研究院(SRI)的人工智能中心于1966年到1972年研制的,名叫Shakey,它裝備了
2020-05-14 08:15:00
展(electronica)的FRANKA演示TI在德國慕尼黑電子展上展示了FRANKA EMIKA工業機器人手臂,展示了未來機器人將會承擔由商業人士執行的更簡單的任務,但這處于一個工業環境中。此處,您可
2019-03-06 06:45:09
工業機器人一般由主構架(手臂)、手腕、驅動系統、測量系統、控制器及傳感器等組成。 1圖是工業機器人的典型結構。機器人手臂具有3個自由度(運動坐標軸),機器人作業空間由手臂運動范圍決定。手腕是機器人
2015-01-19 10:36:12
,另一端是自由的,安裝著末端操作器(如焊槍),在機器人操作時,機器人手臂前端的末端操作器必須與被加工工件處于相適應的位置和姿態,而這些位置和姿態是由若干個臂關節的運動所合成的。因此,機器人運動控制中,必須
2017-12-15 10:25:19
近年,仿人機器人的研發取得了重大進展。Rollin’ Justin 是由德國航空航天中心 (DLR)研制的一款機器人,能夠完成復雜的雙手動作,由于采用了移動平臺,可以在房間中行動自如。它是一種服務
2015-01-21 17:11:24
在機器人的設計中,機器人的靈巧程度很重要。而人最靈巧的莫過于手指,而手指的靈巧性取決于手指的機械結構和電機驅動設計。這里簡要的介紹了機器人手指的電氣系統,詳細的描述了機器人手指關節的電機驅動設計。
2016-01-14 10:34:55
。總之桁架機器人的出現給我們帶來了更多的便捷之處,大大提高生產效率,降低危險。并且隨著時代的發展,桁架機器人性能不斷提高(高速度、高精度、高可靠性、便于操作和維修),機械手控制器系統也跟著向基于PC機
2018-09-27 15:54:21
熱賣現貨 CG635 斯坦福 時鐘發生器 歐陽R:*** QQ:1226365851溫馨提示:如果您找不到聯系方式,請在瀏覽器上搜索一下,旺貿通儀器儀回收工廠或個人、庫存閑置、二手儀器及附件。長期
2020-12-03 08:39:05
新生大廈920SR830 是來自斯坦福研究的 102 kHz 鎖定放大器。放大射頻和微波信號以測量、測試和設計電路。應用包括無線電通信、手機、EMI 測試等等。附加的功能:1 mHz 至 102.4
2022-03-08 15:56:39
隨著芯片及消費電子產品集成度的提高,采用傳感器、機器視覺、控制器和傳動控制的全自動焊錫機機器人等相關自動化產品在電子制造行業被廣泛應用。廣泛采用全自動焊錫機機器人,不僅可提高產品的質量與產量
2017-03-08 16:33:16
隨著人工智能技術的發展,機器人已經開始接管人類的部分工作,例如快遞、工廠作業、餐廳服務員甚至媒體編輯---紐約時報就聘請了一位機器人做總編。未來,機器人可以介入半導體設計開發嗎?例如,機器人可以進行FPGA開發嗎?
2019-10-10 06:33:18
`機器人手指一直以來都是國際公認的高難度科技項目,隨著科技水平的不斷進步和新興的交叉學科不斷涌現,傳統的電磁電機機器人手指由于靈活性差、感知能力低下、力的控制精度不高等,已無法滿足應用的迫切需要
2020-09-28 14:08:22
銷售現貨 斯坦福 SR650 橢圓過濾器 歐陽R:***QQ:734645067回收工廠或個人、庫存閑置、二手儀器及附件。長期 銷售、維修、回收 高頻 二手儀器。溫馨提示:如果您找不到聯系方式,請在
2021-12-31 17:53:59
Stanford Research斯坦福SR850 SR830 鎖相放大器公司名稱:深圳市捷威信電子儀器有限公司聯系人:譚S ***座機號碼:0755-27538807QQ:2776035351地址
2022-02-22 10:53:47
SRS斯坦福FS72510MHzRb頻率標準 SRS斯坦福FS72510MHzRb頻率標準FS725集成了一個銣振蕩器(SRS模型PRS10),一個低噪音的通用交流電源,和一個緊湊的半
2022-07-30 14:01:56
RS斯坦福PS325高壓直流電源 ±25 V to ±2.5 kV10 mAkV1伏特的決議0.05%的準確率可編程限制和旅行GPIB接口RS-232接口(10&20 kV模型)詳情介紹SRS斯坦福
2022-08-05 16:49:16
SRS斯坦福SR560低噪聲電壓前置放大器4 nV/Hz輸入噪聲SRS斯坦福SR560低噪聲電壓前置放大器 SRS斯坦福SR560低噪聲電壓前置放大器SR560是一種、低噪音的前置放大器,適用于
2022-08-22 10:50:39
SRS斯坦福SR510100kHz鎖定放大器0。5赫茲到100 kHz頻率范圍電流和電壓輸入多達80分貝的動態儲備跟蹤帶通和線過濾器內部參考振蕩器四個ADC輸入,兩個DAC輸出GPIB接口rs
2022-08-22 11:10:59
泰科關節機器人具備哪些優勢? 一、編程簡單可以讓無編程經驗的操作人員能快速設置和操作我們的直觀、3D 可視化協作式機器人。只需將機器人手臂移動至需要的位置,或觸摸方便易用的觸屏
2023-04-19 15:13:28
STANFORD斯坦福SR850鎖相放大器斯坦福SR850是一款基于創新 DSP(數字信號處理)架構的數字鎖定放大器。相比,SR850擁有許多顯著的性能優勢——更高的動態儲備、更低的漂移、更低的失真
2023-08-22 17:20:08
置的信號濾波器微分和單端輸入線路或電池操作rs - 232接口SRS斯坦福SR560低噪聲電壓前置放大器 SRS斯坦福SR560低噪聲電壓前
2024-05-20 17:13:03
Tensilica可配置處理器應用在斯坦福Smart Memories項目
Tensilica日前宣布斯坦福大學Smart Memories項目使用Tensilica Xtensa LX2可配置處理器,用于針對下一代應用的多核計算基礎架構。
2008-08-28 09:13:55790 美國STANFORD斯坦福SR510鎖相放大器SRS斯坦福SR510100kHz鎖定放大器0。5赫茲到100 kHz頻率范圍電流和電壓輸入多達80分貝的動態儲備跟蹤帶通和線過濾器內部參考振蕩器四個
2024-10-08 15:20:17
斯坦福(Stanford)STANFORD SR570前置放大器,作為音頻與電子測量領域的璀璨明珠,以其無與倫比的性能與精湛的工藝,贏得了全球專業人士的廣泛贊譽。這款前置放大器不僅是技術的集大成者
2024-10-25 09:20:49
MJA-H系列輕量化關節模組? 專為輕量型人形機器人手臂應用研發,提供定制化服務? 集諧波減速器、電機、編碼器、驅動器于一體? 定位精度高,可靠性穩定性大幅提升? 精巧
2025-02-21 15:04:19
效率可達離子電池十倍的輕型紙電池在斯坦福誕生
北京時間12月8日消息,據國外媒體報道,將來有一天,輕型
2009-12-10 10:58:481455 。
1960年,斯坦福和他的妻子艾麗斯成立了能量轉化設備公司(ECD),專門致力于開發能源相關的東西,而所有的產品都被關于Ovonics的標簽。
當然,在斯坦福所有的發明中,最優秀的莫過于鎳氫
2012-10-19 16:52:312716 電子發燒友網核心提示:查爾姆斯理工大學的研究人員已經開發出世界第一個使用意念控制的植入式的機器人手臂。“骨整合”的技術是意念控制假肢的關鍵。患者腦電波意念腦電波脈
2012-11-30 11:37:334904 高級機器人手冊初學者必備高級機器人手冊高級機器人手冊
2015-12-10 16:42:45 28
28 德國弗勞恩霍夫研究所與醫學圖像計算研究所利用機器人共同巧妙地攻破了針刺腫瘤活檢這項難題,未來有望通過機器人手臂自動完成。 德國研制醫療機械手臂 可輕松破解腫瘤活檢難題 通常,當超聲檢查發現肝部有陰影時,會被懷疑長有腫瘤,接著要進行活檢來確證。
2017-01-05 10:39:111851 工業機器人手臂快速碰撞檢測算法
2017-02-07 18:09:2023 ,名為Project Aslan,它是一個3D打印的機器人手臂,可以將文本翻譯成手語手勢,但是團隊的最終目標是建立一個表現力強大的雙臂機器人,以充分表達復雜性語言。 Project Aslan旨在將文字或口語翻譯成手語。在目前的形式中,Project As
2017-09-19 19:00:015 機器人學是一門邊緣學科,它涉及電子精密機械、空間機構學、操縱動力學、人機工程學等的一門系統工程。本人在已有的機器人手臂的機械結構和機電設計的基礎上,基于Motorola 公司的DSP56805
2017-10-17 16:15:2423 在機器人手臂能夠到達一個狹小的空間或拾取一個精致的物體之前,機器人需要精確地知道它的手在哪里。卡內基梅隆大學機器人研究所的研究人員已經證明,連接到機器人手上的相機可以快速創建一個三維環境模型,并在3D世界中找到手。
2017-12-30 14:33:442524 一般機器人手臂有3個自由度,即手臂的伸縮、左右回轉和升降 (或俯仰)運動。手臂回轉和升降運動是通過機座的立柱實現的,立柱的橫向移動即為手臂的橫移。
2018-04-18 09:48:5719445 
為了達到人類學習的速率,斯坦福的研究人員們提出了一種基于目標的策略強化學習方法——SOORL,把重點放在對策略的探索和模型選擇上。
2018-06-06 11:18:235925 
藍牙控制并且指導機器人手臂動作
2018-07-09 03:22:003961 京東宣布與斯坦福人工智能實驗室(SAIL)啟動京東-斯坦福聯合AI研究計劃(SAIL-JD AI Research Initiative):京東將聯合斯坦福人工智能實驗室圍繞機器學習、深度學習、機器人、自然語言處理和計算機視覺等前沿技術方向,結合京東實際應用場景和數據,開展以研究項目為基礎的合作。
2018-07-11 05:02:003140 據外媒消息,亞馬遜已經獲得了2015年首次申請的專利,該專利描述的是用機器人手臂來分揀投遞物品。
2018-09-13 09:10:531604 李飛飛宣布斯坦福開啟「以人為中心的 AI 計劃」(Human-Centered AI Initiative,HAI),該項目由李飛飛和斯坦福大學前教務長 John Etchemendy 共同主導,Chris Manning 也參與其中。
2018-10-25 11:45:304402 李飛飛卸任斯坦福AI Lab負責人,這已經是半年內李飛飛做的第二次“告別”,也讓這位華裔女科學家此后的研究方向備受全行業關注。
2018-11-20 17:15:135479 今年 6 月,外界就有傳聞稱李飛飛即將從谷歌離職。9 月,這一消息得到證實:李飛飛重回斯坦福任教,同時仍擔任谷歌云的 AI/ML 顧問,而她原本的職位則由 CMU 計算機學院院長 Andrew
2018-11-23 16:36:473418 快速發展的機器人助手領域(有時亦被稱為協作機器人),正在使機器人成為一種更加廉價、靈活和安全的工具,幫助人們處理尋常任務。慕尼黑的Franka Emika希望憑借自己的機器人手臂Panda能抓住這個機會。
2018-12-01 11:56:461326 斯坦福大學有著深厚的多學科研究傳統,斯坦福HAI正是在這一傳統的基礎上發展起來的。我們正在匯集多個領域的領先思想家,以便我們能夠更好地為未來的領導者做好準備,讓他們學習、構建、發明并擴展目標、意圖和以人為本的方法。
2019-03-15 09:03:584919 開源、低成本、高性能,斯坦福大學一個學生團隊開發出全新的四足機器人——Doggo,旨在推進機器人研究和實際應用。
2019-05-23 14:29:174642 開源、低成本、高性能,斯坦福大學一個學生團隊開發出全新的四足機器人——Doggo,旨在推進機器人研究和實際應用。
2019-05-23 14:30:374323 肘部的最大位置不能超過140度,因為該項目的目的是在平面上構建機器人手臂,并且將攝像頭與用戶處保持在同一高度。我們認為只用70度即可,因為這足以彎曲機器人手臂。
2019-08-22 16:27:539101 來自卡內基梅隆大學與明尼蘇達大學的研究人員日前利用無創的腦機接口(BCI)技術,成功開發出第一款由大腦控制的機器人手臂,具有連續跟蹤計算機光標的能力。
2019-06-28 09:46:421306 機器人手臂的伸縮、橫向移動均屬于直線運動。
2019-07-08 11:42:3082049 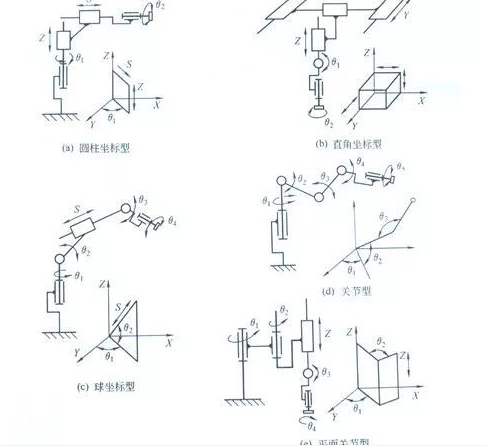
在這個項目中,我將向您展示如何構建Arduino& amp;使用Android手機的藍牙控制機器人手臂。該機器人手臂可以在手動模式下操作,也可以在全自動模式下進行編程。
2019-07-29 09:11:049327 我們使用PVC管和電線套管制作一個自由度(DOF)機器人手臂。用于彎頭聯合我們使用一個伺服電機。伺服連接到Pin-9的Arduino板。
2019-08-22 16:48:343696 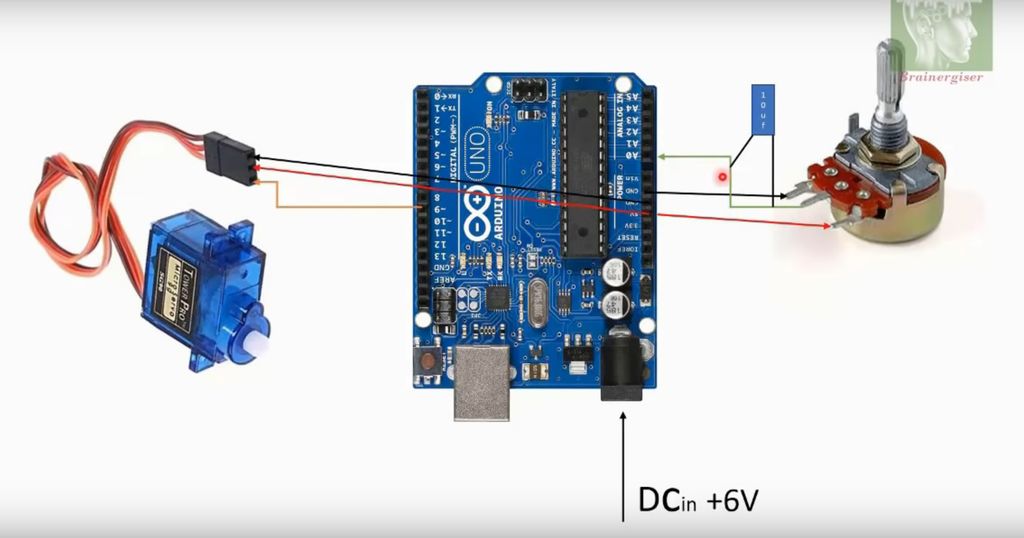
隨著5G技術的普及,即將迎來AI人工智能時代,很多場景將是無人自動化的控制生產運作,這樣我們需要更多的機器人手臂,機器人手臂可以將執行工作的手臂與思考工作的頭腦分離。
2019-09-17 09:41:532368 《斯坦福 2019 全球AI報告》,由斯坦福大學主導,聚集來自MIT、OpenAI、哈佛、麥肯錫等機構的多位專家教授,每年發布AI index年度報告,全面追蹤人工智能的發展現狀和趨勢。
2019-12-16 08:54:222422 2019年即將完結倒計時,這漫長的一年里,關于AI的發展究竟是寒冬期還是蓬勃發展時代,一直有持不同觀點的討論。那么,在即將進入2020之際,或許從斯坦福年度最新發布的《斯坦福 2019 全球 AI 報告》中能夠窺見,AI進行時發展到什么程度?
2019-12-20 11:49:41556 能代替“臟亂、危險、嚴重”的工作的機器人手臂“Float Arm”
2020-04-20 16:06:486627 第一種AI算法根據情況引導機器人手臂動作。研究團隊在特定環境下訓練機器人手臂的操作。這被壓縮為兩軸表示。例如,該算法似乎確定要抓住的物體是門把手還是杯子。
2020-10-28 17:15:122621 2021 年度的斯坦福 AI Index 報告正式發布,從七大版塊出發,探討了過去一年中的 AI 總體發展情況。
2021-03-12 10:23:543492 在網上有許多關于制作機器人手臂的項目,但他們都有類似的控制方式,我感覺缺少了一些樂趣!所以我們決定制作一個可以使用聊天機器人控制的機器人手臂。如果你說“向左移動 45 度”并且手臂會按照你的指令移動,那么它會有多酷!
2021-03-16 11:47:0030 近年來,隨著MEMS及相關技術的發展,微機器人領域已越來越來受人關注。但由于零件的尺寸很小,微機器人組件的裝配需要很高的精確度,一般的裝配方法無法滿足要求。本文介紹了一個可進行微零件裝配工作的機器人手臂控制系統的控制方法。
2021-04-07 09:24:473796 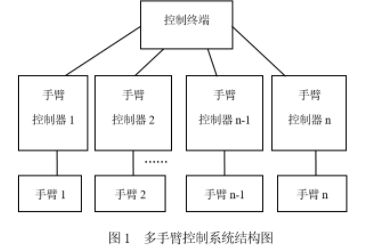
軟體機器人手臂由于具有本質柔順性和連續變形特性,在智能制造、醫療康復,家庭服務等領域有巨大的研究價值和廣泛的應用前景。最新一期的機器人頂刊《The International Journal
2021-04-13 11:49:163742 機器人手臂的伸縮、橫向移動均屬于直線運動。實現手臂往復直線運動的機構形式比較多,常用的有活塞油(氣)缸、齒輪齒條機構、絲杠螺母機構以及連桿機構等。由于活塞油(氣)缸的體積小、重量輕,因而在機器人
2022-03-17 17:16:42949 斯坦福可編程濾波器SR560開機顯示overload。安泰維修檢測實際是儀器無輸出。本期將為大家分享本維修案例。 ? 斯坦福可編程濾波器SR560開機顯示overload維修案例 下面就是斯坦福
2022-11-09 15:01:551630 
電子發燒友網站提供《構建可幫助人們做早餐的桌面智能機器人手臂.zip》資料免費下載
2022-12-28 10:36:413 方案介紹MARK 1是可編程的Arduino機器人手臂。但是,還不止這些,該機械臂可以由手勢控制。硬件部件:Arduino UNO?? ?×?? ?1個?? ?伺服馬達MG996R×?? ?6?? ?5V電池組×?? ?1個?? ?PCA9685具有I2C接口的8通道8W 12V FET驅
2022-12-30 14:42:174 在智能機器人手臂–第1部分:機械結構和接線中,我們已經將機械手臂的本體組裝在一起。您有沒有想過擁有一款可以幫您滿足日常需求的設備?而且該設備能夠區分您(主人)和其他非授權用戶,這并非簡單的普通工具。
2023-02-24 14:30:292957 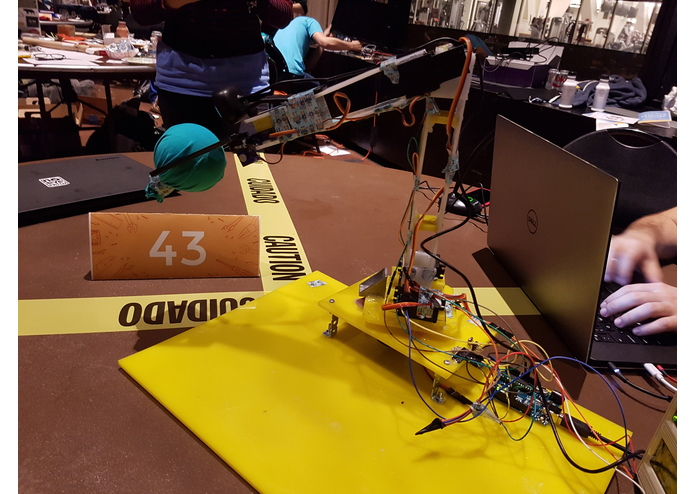
物料搬運組合方案及定制化方案。在與FIPA公司建立緊密合作后,史陶比爾將通過自身遍布全球的技術服務網絡,帶來適用于所有機器人手臂的末端工具解決方案。 史陶比爾EOAT機器人手臂末端工具解決方案 當前,自動化物料搬運在全球范圍內呈上升趨勢,無此自動化,以工業4.0為核心宗旨的未
2023-03-01 16:12:491132 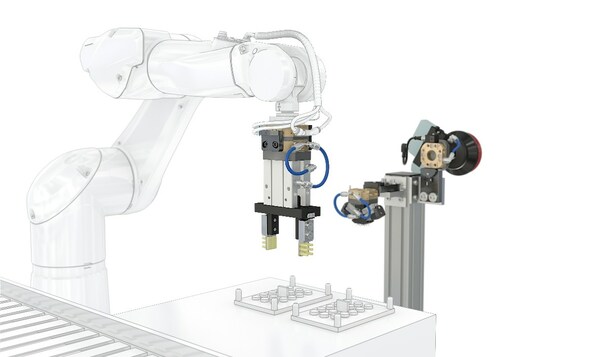
電子發燒友網站提供《用于Arduino Due的DIY Braccio機器人手臂護罩.zip》資料免費下載
2023-06-14 15:07:510 電子發燒友網站提供《Scorbot ER-V+自由度機器人手臂控制器和模擬器設計.zip》資料免費下載
2023-07-10 15:08:572 機器人技術處于工業 4.0、人工智能和邊緣革命的前沿。讓我們看看如何創建 FPGA 控制的機器人手臂。
2023-10-24 17:15:332211 
機器人技術處于工業 4.0、人工智能和邊緣革命的前沿。讓我們看看如何創建 FPGA 控制的機器人手臂。
2023-10-24 17:26:202030 
近日某院校送修一臺斯坦福可編程濾波器SR560,客戶反饋儀器燒了 overload,對儀器進行初步檢測,確定與客戶描述故障一致。本期將為大家分享本維修案例。 下面就是斯坦福-SR560維修情況
2024-01-09 15:58:221068 
還記得曾火遍全網的ALOHA家務機器人嗎?最近該項目導師,斯坦福計算機科學與電氣工程系教授ChelseaFinn在X宣布,正式與其他幾位伯克利大牛學者、谷歌DeepMind科學家共同創業,全力為
2024-04-14 08:04:55135 
眾所周知,斯坦福的東西一直以來,好用,貴,貨期長動輒幾個月,很苦惱 今天,他來了,他的替代來了 首先是最經典的型號斯坦福SR830,它的頻率可以達到102.4 kHz ,18位的ADC,采樣率可以
2024-07-10 17:05:541305 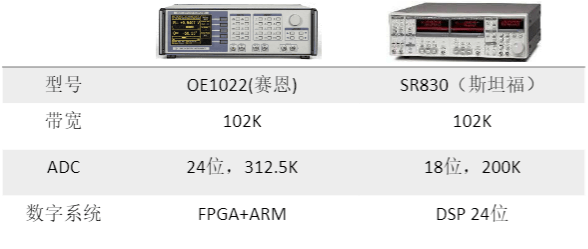
斯坦福STANFORD FS725銣鐘 SRS斯坦福FS725 10MHzRb頻率標準 ? SRS斯坦福FS72510MHzRb頻率標準FS725集成了一個銣振蕩器(SRS模型PRS10),一個
2024-12-13 15:22:52880 斯坦福AI指數報告這是一份影響力很大的報告,每年一期。該報告旨在追蹤、整合、提煉并可視化與人工智能(AI)相關的各類數據。報告提供無偏見、經過嚴格審查、來源廣泛的數據,幫助政策制定者、研究人員、高管
2025-04-17 18:05:251690 
斯坦福前置放大器SR445A是一款專為低噪聲信號放大設計的高性能設備,覆蓋直流至高頻段,提供可變增益及靈活的濾波功能,適用于光電探測、生物電信號、精密測量等領域。
2025-06-20 16:52:08904 
在工業自動化4.0浪潮中,汽車制造車間對設備協同與柔性生產的需求愈發迫切。PROFIBUS DP與ETHERNET/IP協議的融合,成為打破西門子PLC與機器人手臂通信壁壘的關鍵技術,為汽車生產線
2025-06-24 16:35:42350 斯坦福鎖相放大器是由斯坦福研究系統公司(Stanford Research Systems, SRS)研發的一款測量工具,主要用于微弱信號的測量和提取。它結合了高靈敏度、高精度、高穩定性和多功能性于一體,是科研和工業領域的重要設備。
2025-07-30 10:58:51781 
自動化生產線的“命門”——機器人手臂的“停機焦慮”在汽車制造車間的焊接工位,在電子裝配廠的精密貼片環節,在物流分揀中心的高速分撥線上,機器人手臂的突然停機如同多米諾骨牌的第一張牌——輕則導致機械臂卡
2025-07-29 16:07:30411 
 電子發燒友App
電子發燒友App








 工商網監
工商網監
評論