 用意念控制的植入式機器人手臂
用意念控制的植入式機器人手臂

總部設在瑞典查爾姆斯理工大學的研究人員已經開發出世界第一個使用意念控制的植入式的機器人手臂。該機器人手臂使用截肢者的神經和剩余的肌肉承擔傳導功能,初步的臨床使用將在稍后首先在北半球進行。20世紀60年代以來的截肢者通常使用的是電脈沖方法來控制他們的行動,但是由于電脈沖方法的種種限制,假肢安裝者會覺得身體上的不適合以及操作上的難以控制,因此大多數的截肢者最終放棄了選擇安裝假肢。
瑞典查爾姆斯理工大學的研究人員熱衷于假肢的研究工作,在研究過程中,他們發現了一種名叫“骨整合”的技術,這種技術最初的應用是在1960年,而最早的應用范圍也僅限于耳朵,眼睛,鼻子這些較小的假體上。
研究人員表示“骨整合”的技術是意念控制假肢的關鍵。這項技術將鈦合金的假肢植入患者骨架的同時,假體直接連接到病患的肌肉神經以獲得永久的生物電極,這種方式與之前典型的假肢控制方式相比的優勢在于,這提供了一個更加穩定的生物脈沖信號。
患者腦電波意念腦電波脈沖被被捕獲后,首先被轉移到神經系統的接口,最后,通過復雜的算法將脈沖解碼于人工手臂,以幫助患者很好地控制動作。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
機器人
+關注
關注
213文章
31074瀏覽量
222189 -
醫療器械
+關注
關注
19文章
904瀏覽量
53298
發布評論請先 登錄
相關推薦
熱點推薦
再談低溫燒結銀的應用:從春晚四家機器人出鏡的幕后推手說起
科技:《武 BOT》:H2人形機器人31個高精度關節、單臂7自由度,完成醉拳、雙截棍、舞劍,同步誤差**< 0.1秒;核心是高功率密度伺服電機+高速控制+**強散熱。
**魔法原子:《智造
發表于 02-17 14:07
【案例分享】電子谷定制通訊線束:人形機器人穩定律動連接方案
零失真。今天為大家拆解其核心創新與場景適配優勢,為何電子谷線束能成為機器人手臂連接的優選方案。01三大技術突破破解機器人運動傳輸核心痛點人形機器人手臂存在高頻擺動

高精度機器人控制的核心——基于 MYD-LT536 開發板的精密運動控制方案
一、背景:機器人邁向“微米級控制時代”
隨著智能制造和自動化產業的持續升級,工業機器人不再僅僅承擔重復搬運,而是被要求在裝配、檢測、精密加工等高精度場景中完成微米級控制任務。
在這些“
發表于 11-14 15:48
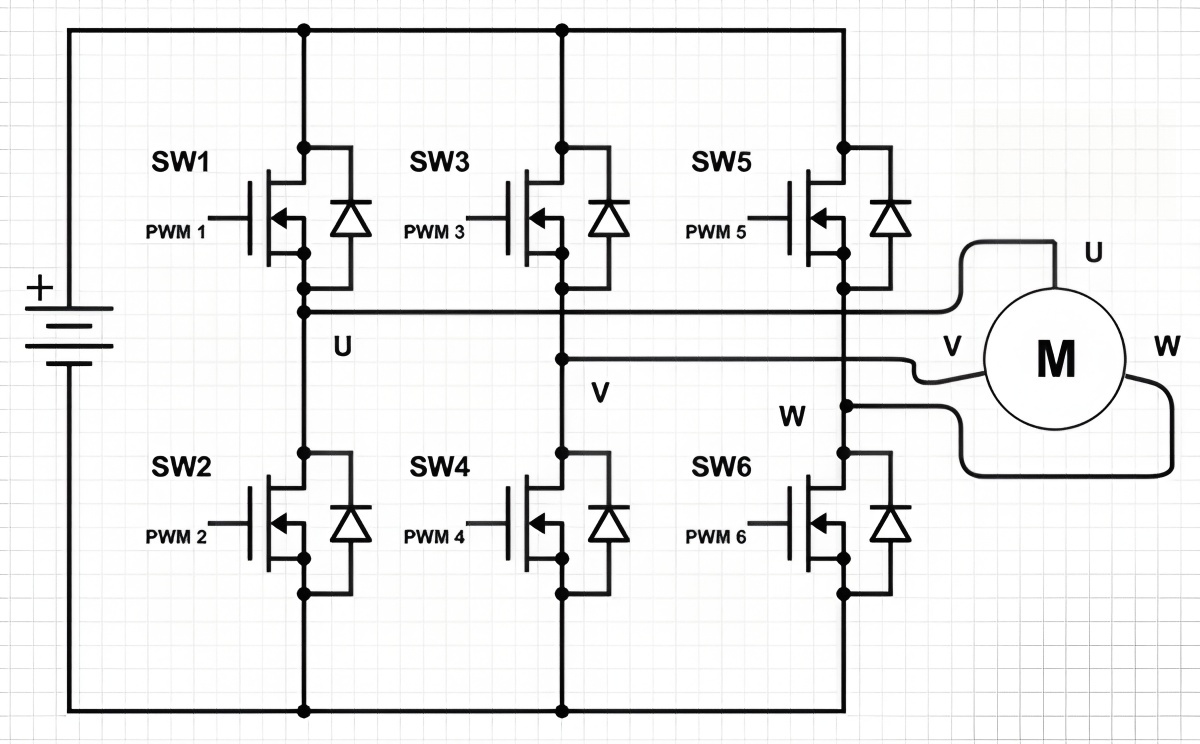
用于機器人手臂的基于B3M010C075Z和BTD5452R的三相全橋電機驅動器設計報告
傾佳電子用于機器人手臂的基于SiC碳化硅MOSFET器件B3M010C075Z和帶有DESAT短路保護和米勒鉗位的隔離驅動BTD5452R的三相全橋電機驅動器設計報告 摘要 傾佳電子(Changer
機器人競技幕后:磁傳感器芯片激活 “精準感知力”
幫助機器人實時修正重心,大幅降低翻倒風險。
在關節運動控制上,磁傳感器芯片實現 “毫米級精度保障”。以昆泰芯 KTM59 系列磁編碼器的離軸應用為例,其非接觸式磁信號捕捉技術,解決了傳統光學編碼器在
發表于 08-26 10:02
MT6701絕對式磁編碼器優化機器人關節伺服控制
在當今科技飛速發展的時代,機器人已經廣泛應用于工業制造、物流配送、醫療服務等眾多領域。而機器人關節伺服控制作為機器人運動的關鍵技術,其性能的優劣直接影響著
生產線不停擺的“隱形衛士”:優比施UPS電源,精準守護機器人手臂零停機
自動化生產線的“命門”——機器人手臂的“停機焦慮”在汽車制造車間的焊接工位,在電子裝配廠的精密貼片環節,在物流分揀中心的高速分撥線上,機器人手臂的突然停機如同多米諾骨牌的第一張牌——輕則導致機械臂卡

汽車智造“破界”!PROFIBUS DP轉ETHERNET/IP激活機器人手臂超能力
的智能化轉型注入強勁動力。 西門子PLC以其穩定可靠的控制性能,長期作為汽車制造車間的核心控制中樞。通過PROFIBUS DP協議,PLC作為主站可精準調度從站設備,確保生產流程的有序執行。而機器人手臂作為汽車焊接、裝配等關鍵工
中科億海微SoM模組——嵌入式工業現場總線通信控制板
嵌入式工業現場總線是一種高速、低成本的內部總線技術。它主要用于PLCIO模塊、機器人手臂等應用場景,能夠提供高效的數據傳輸和靈活的配置選項。圖嵌入式工業現場總線通信控制板正面(左)、反

腦機接口柔性微電極植入機器人問世
中國科學院自動化研究所傳來好消息;該所科研團隊成功研發腦機接口柔性微電極植入機器人CyberSense。 據悉,CyberSense機器人具備自動化程度高、可植入數量多、空間定位準、時
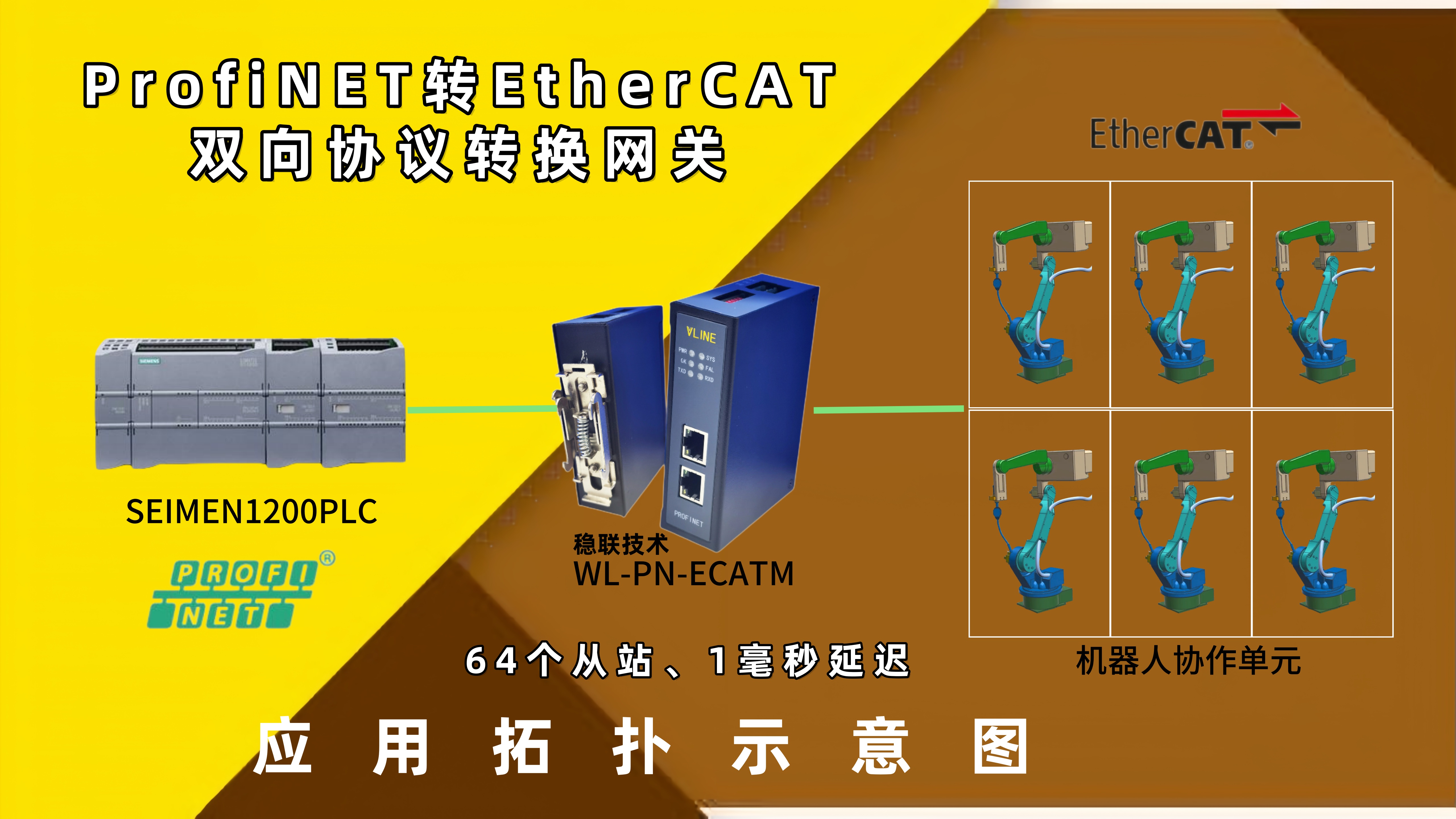
機器人手臂"聽不懂"指令?EtherCAT轉PROFINET網關妙解產線通信僵局
協作機器人(如KUKA iiWA)使用EtherCAT控制,與Profinet主站(如西門子840D CNC)同步動作。
基于Profinet-EtherCAT網關-穩聯技術WL-PN-ECATM
【「# ROS 2智能機器人開發實踐」閱讀體驗】+內容初識
、Gazebo仿真(含RGBD相機/激光雷達仿真)、實物機器人運動控制,實現\"仿真→實物\"的無縫銜接
高階應用篇(7-9章)
聚焦視覺SLAM、自主導航等前沿場景,提供完整項目鏈路(如
發表于 04-27 11:24
有人這CAN機器手臂控制板的原理圖嗎?CAN舵機ID無法被識別
CAN通信芯片)導致的嗎?
因為,舵機控制板與機器臂(貌似是什么克魯澤機器手臂)是學長流傳下來的,沒有找到硬件上的資料,控制指令倒是有一些
發表于 04-22 12:19
基于RISC-V內核的嵌入式系統在機器人關節控制中的應用研究
摘要 隨著機器人技術的飛速發展,關節控制作為機器人系統中的關鍵環節,對機器人的性能和穩定性起著至關重要的作用。傳統的關節控制多采用基于ARM
開源項目!教你如何制作一個開源教育機械臂
決定使用我的舊Anet A8 3D打印機構建一個緊湊的機器人手臂。
為了消除布線和試驗板的麻煩,我設計了一個定制的即插即用板,使構建和控制3D打印機器人手臂變得更容易。編程教育機器人
發表于 03-10 11:22



 工商網監
工商網監
評論