? ?1.?最常見的電機位置傳感器有哪些? 用于電機的最先進的位置傳感器被認為是基于旋轉變壓器(resolver-based)和編碼器(encoder-based)的傳感器。 1.1基于旋轉變壓器
2023-08-30 09:09:02 9167
9167 
的位置、軌跡、速度、加速度和受力大小進行工作。機器人外部傳感器的功能是認識工作環境,其提供信息的目的是檢查產品質量、取物、控制操作、應付環境和修改程序。機器人內部傳感器的原理與前述章節基本相同。機器人外部
2018-01-03 17:09:03
一般機器人系統由機械手、環境、任務和控制器四個互相作用的部分組成。我們稱一般安裝在機器人機械手上的傳感器為內傳感器(Inner Sensons),而稱作為環境的一部分的傳感器為外傳感器
2021-09-16 08:45:39
、味覺、滑覺等,對應有多種傳感器,所以機器人傳感產業也形成了生產和科研力量。內傳感器機器介機電一體化的產品,內傳感器和電機、軸等機械部件或機械結構如手臂(Arm)、手腕(Wrist)等安裝在一...
2021-09-16 09:05:02
、物體是否滑落等。 機器人傳感器主要類別: 內傳感器 機器介機電一體化的產品,內傳感器和電機、軸等機械部件或機械結構如手臂(Arm)、手腕(Wrist)等安裝在一起,完成位置、速度、力度的測量
2018-11-08 15:55:32
的Add按鈕添加自定義類型以及數量的傳感器。碰撞/超聲/紅外傳感器的位置和角度也在這個頁面進行配置,參考坐標為上述機器人底盤參考坐標。注意:ID不能重復定義,即使傳感器的類型是不同的,ID也不可以定義重復
2019-01-24 14:42:36
ARM機械手臂有各種形狀和大小。機械臂是機器人的一部分,用來定位末端執行器和傳感器來完成編程任務。許多(但不是全部)類似于人類的手臂,有肩膀,肘部,手腕,甚至手指。這給了機器人很多方法來定位它自己在它
2022-03-31 10:31:31
。 1、自由度 機器人具有的獨立坐標軸運動的數目。機器人的自由度是指確定機器人手部在空間的位置和姿態時所需要的獨立運動參數的數目。手指的開、合,以及手指關節的自由度一般不包括在內。.機器人的自由度
2017-08-15 14:00:52
。
同時,磁傳感器還是多傳感器融合中的 “穩定錨點”。在機器人運動系統的融合定位中,它常作為核心基準。以 “足球機器人” 項目為例,當視覺傳感器因強光出現噪點、超聲波傳感器受聲波反射干擾時,內置
2025-08-26 10:02:02
機器人適配焊縫跟蹤傳感器對鏟斗焊接尋位引導傳感器型號:HD8-0045W應用:鏟斗焊接機器人焊接缺陷:因鏟斗形狀復雜,機器人焊接需示教點位多,每一個產品焊接前都需要示教,浪費了大量的時間,并容易焊偏
2020-12-02 09:36:09
這個機器人比較高大,但也是由金屬拼裝件套件拼裝而成。控制板是蘋果板,機器人的底部安裝有巡線傳感器,可以自動循黑線前進,這樣只需從你的房間或者辦公位置布置一條黑線到飲水機,機器人就可以沿黑線自動
2016-03-25 14:28:28
設計的醫療康復機器人手臂控制系統,具有杰出的功耗控制和電機控制的高級定時器,能產生3對可配置并互補輸出的PWM信號。通過在Simulink上建立雙閉環PID算法模型,得到合適的PID參數來改變PWM波
2018-08-22 09:31:22
申請理由:現正在進行一個關于智能清掃機器人的項目研究,希望基于ARM搭建一款可以實現自動清掃和自動返回充電的,具有自主管理能力的清掃機器人,同時對相應功能進行改造完善。需要用到ARM芯片若干項目描述
2015-07-06 10:59:02
開發平臺的海洋環境探測機器人,機器人由海洋探測船攜帶,需要使用時可將機器人放置于深海中,機器人和測量船之間通過光纖進行通訊,另外測量船可以通過超 聲波系統對機器人的位置進行跟蹤,機器人有機器手臂可以
2015-06-25 18:02:34
機器人領域應用的越來越廣泛,機器人設備自身不能解決的問題很多。可能你可以找到具體的原因在哪里,最主要的原因有可能是應用程序的問題,有了傳感器這些問題都會變得簡單。 當我們使用一個機器人手臂,為達到有效載荷
2018-12-07 10:43:12
力量傳感器,來獲取外界接觸力量的資訊,進而實現智能工廠自動化所需的人機協作功能。AxRobot助力控制機器手臂解決方案,無需額外安裝價格昂貴的力量傳感器,透過內置的馬達助力控制器功能,即可偵測外部突發
2021-07-23 14:16:11
,進而實現智能工廠自動化所需的人機協作功能。 AxRobot助力控制機器手臂解決方案,無需額外安裝價格昂貴的力量傳感器,透過內置的馬達助力控制器功能,即可偵測外部突發碰撞事件,緊急停止機器手臂的運作并發出錯誤警報訊息,以確保在人與機器協作過程中操作人員的安全。`
2021-06-23 17:10:33
他時候,機器人需要輸出一定扭矩去提升負載和把負載從一個位置移動到另一個位置。當機器人識別出運動過程中一個異常扭矩增加值,如碰撞,會自動停下來。5、安全傳感器要想讓工業機器人與人進行協作,首先要找出可以保證
2018-10-12 11:02:18
相機和激光焊縫跟蹤傳感器及其控制裝置等。博智慧達的智能激光焊縫跟蹤系統可以和各種焊接機器人通訊,從而提高焊接質量。焊縫跟蹤:激光焊縫跟蹤系統與金紅鷹智能焊接機器人通訊完成焊縫跟蹤:激光焊縫跟蹤系統與金紅
2019-04-13 10:30:39
是我院自主研制的一款仿人機器人。本文首先對DF-1機器人總系統進行了介紹,然后根據DF-1機器人需要實現的功能,設計DF-1機器人的傳感器系統,然后實現傳感器系統的具體工作電路,利用ARM9實現了傳感器系統信息的采集,最后對傳感器系統的效果進行了試驗驗證。
2019-06-21 07:04:37
摘要:設計一款具有自主吸塵功能并且結構簡單、成本低的小型家用吸塵機器人,實現了室內半自動或者全自動的清潔工作,從一定程度上代替人們做繁雜的家務。在硬件選型上,以ARM Cortex-M3處理器為
2018-11-06 16:01:27
手術機器人系統的工作原理是什么?如何去實現一種基于傳感器的機器人手術系統設計?
2021-09-28 08:46:20
發生在人和協作機器人之間。必須確保在機器人手臂與人或任何物體之間發生碰撞的情況下,機器人手臂中集成的傳感器立即關閉機器人。如果一個傳感器或其后的電子電路發生故障,機器人也會關閉。因此,機器人制造商必須
2019-03-06 06:45:09
)用于控制機器人各運動部件的位置、速度和加速度,使機器人手爪或機器人工具的中心點以給定的速度沿著給定軌跡到達目標點。通過傳感器獲得搬運對象和機器人本身的狀態信息,如工件及其位置的識別,障礙物的識別
2015-01-19 10:36:12
、以及內部傳感器等組成。它的任務是精確地保證末端操作器所要求的位置,姿態和實現其運動。[img][/img]控制器是機器人的神經中樞。它由計算機硬件、軟件和一些專用電路構成,其軟件包括控制器系統軟件
2017-12-15 10:25:19
和較短的靜區時間。”Klaus Kunze 說。通過倍福的標準EtherCAT 端子,完美地實現了力傳感器和伺服驅動的連接。倍福的 SSI終端從機器人腿的位置傳感器采集數據。機械臂和軀干
2015-01-21 17:11:24
,體積小同樣是機器人上傳感器的要求,對于安裝在機器人手臂等運動部件上的傳感器,重量一定要輕,否則會加大運動部件的損壞,影響機器人的運動性能。對于工作空間受到某種限制的機器人,對體積和安裝方向的要求也是
2015-01-20 14:56:46
跟蹤傳感器之后,傳感器與機器人進行標定,機器人從傳感器系統獲取焊縫位置,后續上下料機器人焊接時就可以自動糾偏,從而解決了車間焊接過程中由于型材切割、投放誤差導致的焊偏漏焊等問題,提高了焊接質量和產品合格率,節省了大量后期補焊打磨等人工作業,大大提高了產品生產率。
2020-12-02 09:37:17
`蘇州博智慧達激光科技有限公司是一家專業從事激光測量應用軟件開發,系統集成與硬件銷售的科技型公司,主要產品包括激光輪廓傳感器,3D激光掃描相機,焊縫跟蹤傳感器,焊縫跟蹤系統,360°輪廓尺寸測量儀
2019-12-06 14:58:55
和識別精度3.自主設計的機器人和傳感器標定算法,精度較高,標定流程簡單易用4.優化了抗電磁干擾系統,使系統穩定性得到了提升,抗弧光和飛濺,實時跟蹤,焊縫寬度自動適應5.系統整體精度在±0.5mm以內,可
2020-06-16 09:48:50
焊接機器人加裝激光焊縫跟蹤傳感器是焊接自動化的發展趨勢近年來隨著現代制造業的蓬勃發展,焊接技術的應用愈發廣泛。傳統的焊接工作是人工完成的,雖然操作方便,靈活多變,但對經驗的依賴非常大,重復精度不高
2020-03-16 14:57:05
的6軸關節式操作機,它由驅動器、傳動機構、機械手臂、關節以及內部傳感器等組成。2、機器人控制柜:它是機器人系統的神經中樞,包括計算機硬件、軟件和一些專用電路,負責處理機器人工作過程中的全部信息和控制其
2020-11-16 16:18:45
跟蹤器,可實現與機器人控制系統實時通訊跟蹤焊縫進行焊接,為機器人裝上眼睛,實時焊縫跟蹤尋位不僅可以解決上述難題,而且還根治盲焊機器人的通病。
2019-04-19 10:48:41
復雜的焊件,可減少編程工作。具有開源的軟件架構,用戶可自行添加通訊協議與各種機器人進行配合。IP67防護等級,全系標配防護三件套目前我們的傳感器有如下三個型號:自主研發品牌,也可根據客戶需求定制
2019-04-29 12:02:32
不均勻,造成實際焊接軌跡和成型焊道不一致,機器人無法對這些變化做出及時反饋。應用優勢:1.適配焊縫跟蹤傳感器后,多層多道自動排列焊道;3. 焊道自動切換,包括焊槍的姿態變更;4. 根據實際應用可軟件定制。
2020-03-06 16:02:30
本體和控制柜(硬件及軟件)組成;而焊接裝備,以弧焊及點焊為例,則由焊接電源(包括其控制系統)、送絲機(弧焊)、焊槍(鉗)等部分組成。對于智能機器人,還應配有傳感系統,如激光焊縫跟蹤傳感器及其控制裝置等。焊縫跟蹤
2019-08-01 13:47:57
控制和通信 IC 的發展在實現下一代的機器人中起到重要作用。然而,這些復雜的現代機器人的核心是許多新的、小型化和低成本的傳感技術的出現與融合。對實現下一代機器人至關重要的幾項關鍵傳感器技術包括磁性位置傳感器、存在傳感器、手勢傳感器、力矩傳感器、環境傳感器和電源管理傳感器。
2019-07-31 07:46:31
知道力的傳感器,可以對機器人手臂上的力進行監控,根據數據分析,對機器人接下來行為作出指導。機械臂機器人對于力扭矩傳感器的應用非常廣泛,資料圖4.碰撞檢測傳感器工業機器人尤其是協作機器人最大的要求就是安全
2018-11-08 15:52:28
管焊機器人適配激光焊縫跟蹤傳感器搭載5G技術,智能工業發展的新方向 1.自動化和智能化是焊接行業發展趨勢焊接行業是關乎工業制造生產與維護服務的核心行業之一,是大型安裝工 程建設期間的一項關鍵工作,其
2020-07-29 14:35:57
給機器人以平衡感的各種方法測量傾角的傳感器 為機器人提供平衡感的最普通方法之一是用一個傾角傳感器或傾角開關。它可以測量機器人與地心之間的相對角度。如果機器人翻倒了,傳感器或開關的角度就改變,這可
2018-10-30 17:10:53
八年前,研究人員推出了一種稱為GelSight的新型,它使用與物體的物理接觸來提供其表面的非常詳細的三維地圖。現在,通過將GelSight傳感器安裝在機器人手臂的夾具上,兩個團隊給予機器人更高
2018-11-08 15:58:29
)。在三方向(前、左、右)組成超聲波測距系統,就是為機器人了解其前方、左側和右側的環境而提供一個運動距離信息。超聲波傳感器接上電源可以單獨作為超聲波測距使用, 超聲波傳感器還可以指定從單片機I/O端口上輸出
2018-08-09 15:19:59
。]微型閉環控制管理:<span]機器人手指微型閉環控制超聲電機管理系統,驅動控制運算能力需求強,使用高于15位絕對編碼器,實現精準的運動控制,使用傳感器以及機器人手指運動算法實現精細化高精度
2020-09-28 14:08:22
通過視覺傳感器獲取互動表演者的手臂姿態,揮動雙手臂模仿表演者的動作,實現對機器人的仿生模擬控制。邯鄲學舞機器人由一個視覺傳感器、兩個三自由度手臂、機器人身體和視覺處理控制器等組成;該機器人通過視覺傳感器獲取互動表演者的手臂姿態,揮動雙手臂模仿表演者的動作,實現對機器人的仿生模擬控制。
2016-03-28 11:42:25
,然后根據DF-1機器人需要實現的功能,設計DF-1機器人的傳感器系統,然后實現傳感器系統的具體工作電路,利用ARM9實現了傳感器系統信息的采集,最后對傳感器系統的效果進行了試驗驗證。
2019-07-29 06:09:58
優點,極大地拓展了傳感器的應用場景。<span]應用范圍:機器人手指彎曲,虛擬裝配訓練,手語識別系統,競技游戲虛擬動作,機器人手臂,VR數據手套,關節運動捕捉,智能穿戴,新型智能玩具,運動健康監測。產品參數`
2019-05-10 17:37:12
元件。手臂、軀體、車輪等機器人主體的可動部都裝有小型伺服電機,控制器將精準地控制每個電機的動作。同時,角度傳感器則準確地檢測電機旋轉的角度和速度。 為了讓陪伴機器人之類的小型機器人做出自然準確的動作
2022-03-04 14:41:19
本文提出了一種焊接機器人焊縫自動跟蹤系統用以實現焊槍對焊縫的實時自動跟蹤。系統中應用激光焊縫傳感器測量焊縫的位置,并采用Fuzzy-P 雙模分段控制進行焊縫的糾偏。DSP 作
2009-06-17 11:32:47 70
70 艙外移動機器人在空間站工作時,其手爪與工件及空間站的安全連接至關重要。分別用BP神經網絡和徑向基函數神經網絡,對機器人手爪上的力傳感器、接近覺傳感器和位移傳感器的
2009-07-17 10:15:3010 本文提出了一種焊接機器人焊縫自動跟蹤系統用以實現焊槍對焊縫的實時自動跟蹤。系統中應用激光焊縫傳感器測量焊縫的位置,并采用Fuzzy-P雙模分段控制進行焊縫的糾偏。DSP作為
2010-07-20 17:00:4538 MJA-H系列輕量化關節模組? 專為輕量型人形機器人手臂應用研發,提供定制化服務? 集諧波減速器、電機、編碼器、驅動器于一體? 定位精度高,可靠性穩定性大幅提升? 精巧
2025-02-21 15:04:19
GTS機器人位置精度激光跟蹤測量儀是高精度、便攜式的空間大尺寸坐標測量機。它集激光干涉測距技術、光電檢測技術、精密機械技術、計算機及控制技術、現代數值計算理論于一體,主要用于百米大尺度空間三維坐標
2025-04-14 11:00:17
為了滿足空間機器人對不同手爪的更換要求,研制出手爪的自動更換裝置。該裝置基于多種傳感器,對機械手臂末端的位置、姿態以及對接時的工作狀態進行實時檢測.
2011-09-15 14:42:4677 電子發燒友網核心提示:查爾姆斯理工大學的研究人員已經開發出世界第一個使用意念控制的植入式的機器人手臂。“骨整合”的技術是意念控制假肢的關鍵。患者腦電波意念腦電波脈
2012-11-30 11:37:334904 德國弗勞恩霍夫研究所與醫學圖像計算研究所利用機器人共同巧妙地攻破了針刺腫瘤活檢這項難題,未來有望通過機器人手臂自動完成。 德國研制醫療機械手臂 可輕松破解腫瘤活檢難題 通常,當超聲檢查發現肝部有陰影時,會被懷疑長有腫瘤,接著要進行活檢來確證。
2017-01-05 10:39:111851 工業機器人手臂快速碰撞檢測算法
2017-02-07 18:09:2023 您已根據視頻源、其它傳感器、項目目標和應用細節的輸入,確定了機器人手臂的軌跡和位置。 剩下只有一個問題——即將所需的目標位置轉換為特定指令,以需要的加速度、速度和減速度驅動手臂的電機,使其在沒有過沖和任何電氣問題的情況下(如果存在機械故障)順利到達終點。
2017-05-10 08:53:0410 由于接近傳感器能夠感應距離和位置的變化,所以,也是機器人手夾持器中,測量開合情況的常用傳感器件。
2017-09-20 17:00:0810 機器人常用傳感器根據檢測對象的不同可分為內部傳感器和外部傳感器。內部傳感器主要用來檢測機器人本身狀態(如手臂間角度),多為檢測位置和角度的傳感器。外部傳感器主要用來檢測機器人所處環境(如是什么物體
2018-07-31 08:10:0033873 一般機器人手臂有3個自由度,即手臂的伸縮、左右回轉和升降 (或俯仰)運動。手臂回轉和升降運動是通過機座的立柱實現的,立柱的橫向移動即為手臂的橫移。
2018-04-18 09:48:5719445 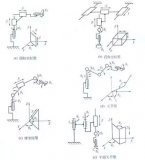
藍牙控制并且指導機器人手臂動作
2018-07-09 03:22:003961 據外媒消息,亞馬遜已經獲得了2015年首次申請的專利,該專利描述的是用機器人手臂來分揀投遞物品。
2018-09-13 09:10:531604 在一份發表的論文中,美國國家工程院院士,斯坦福大學化學工程系教授鮑哲楠及其團隊證明了傳感器能夠允許機器人手臂握持并不會擠爆嬌弱易碎的漿果和乒乓球。鮑哲南表示,位于手套指尖的傳感器能夠同時模擬實現人類靈活度的兩個關鍵性質:壓力的強度和方向。
2018-11-27 08:44:521157 快速發展的機器人助手領域(有時亦被稱為協作機器人),正在使機器人成為一種更加廉價、靈活和安全的工具,幫助人們處理尋常任務。慕尼黑的Franka Emika希望憑借自己的機器人手臂Panda能抓住這個機會。
2018-12-01 11:56:461326 控制和通信IC的發展在實現下一代的機器人中起到重要作用。然而,這些復雜的現代機器人的核心是許多新的、小型化和低成本的傳感技術的出現與融合。對實現下一代機器人至關重要的幾項關鍵傳感器技術包括磁性位置傳感器、存在傳感器、手勢傳感器、力矩傳感器、環境傳感器和電源管理傳感器。
2018-12-05 14:39:465230 您已根據視頻源、其它傳感器、項目目標和應用細節的輸入,確定了機器人手臂的軌跡和位置。 剩下只有一個問題——即將所需的目標位置轉換為特定指令,以需要的加速度、速度和減速度驅動手臂的電機,使其在沒有過沖和任何電氣問題的情況下(如果存在機械故障)順利到達終點。
2019-04-06 08:37:002008 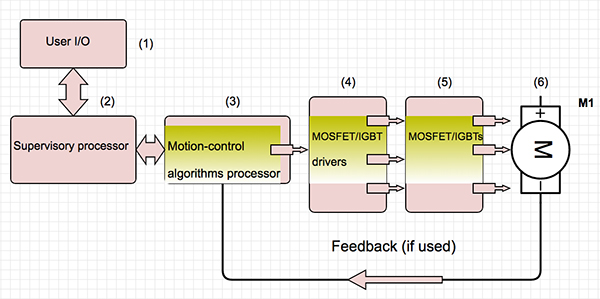
肘部的最大位置不能超過140度,因為該項目的目的是在平面上構建機器人手臂,并且將攝像頭與用戶處保持在同一高度。我們認為只用70度即可,因為這足以彎曲機器人手臂。
2019-08-22 16:27:539101 來自卡內基梅隆大學與明尼蘇達大學的研究人員日前利用無創的腦機接口(BCI)技術,成功開發出第一款由大腦控制的機器人手臂,具有連續跟蹤計算機光標的能力。
2019-06-28 09:46:421306 機器人手臂的伸縮、橫向移動均屬于直線運動。
2019-07-08 11:42:3082049 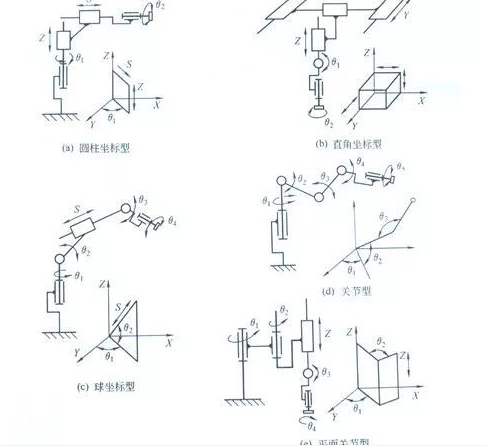
在這個項目中,我將向您展示如何構建Arduino&amp; amp;使用Android手機的藍牙控制機器人手臂。該機器人手臂可以在手動模式下操作,也可以在全自動模式下進行編程。
2019-07-29 09:11:049327 我們使用PVC管和電線套管制作一個自由度(DOF)機器人手臂。用于彎頭聯合我們使用一個伺服電機。伺服連接到Pin-9的Arduino板。
2019-08-22 16:48:343696 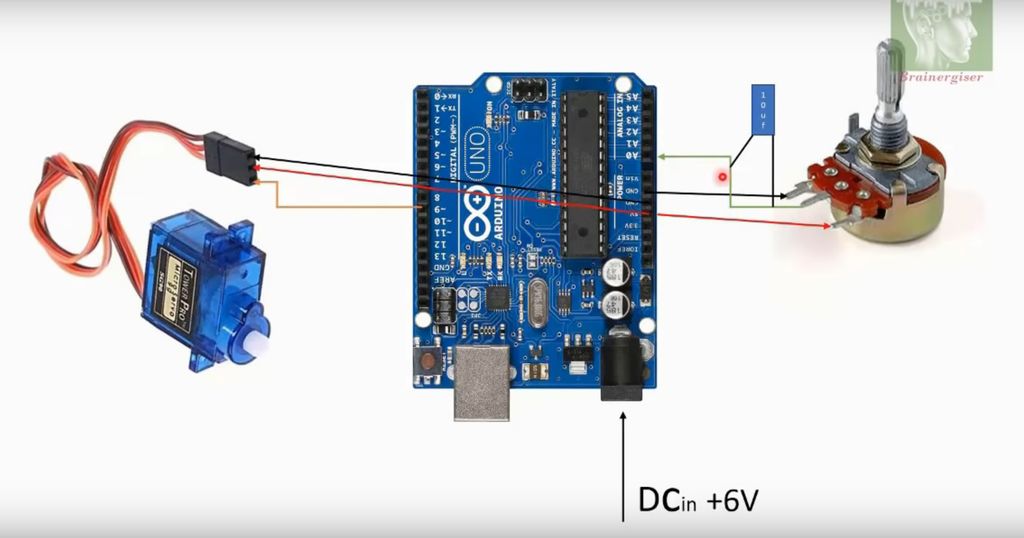
來自卡內基梅隆大學與明尼蘇達大學的研究人員日前利用無創的腦機接口(BCI)技術,成功開發出第一款由大腦控制的機器人手臂,具有連續跟蹤計算機光標的能力。
2019-08-19 09:33:431880 隨著5G技術的普及,即將迎來AI人工智能時代,很多場景將是無人自動化的控制生產運作,這樣我們需要更多的機器人手臂,機器人手臂可以將執行工作的手臂與思考工作的頭腦分離。
2019-09-17 09:41:532368 位置傳感器用來測量機器人自身位置的傳感器。位置傳感器可分為兩種,直線位移傳感器和角位移傳感器。
2019-09-30 09:19:0624774 顧名思義,無刷直流電機沒有電刷觸點,需要使用電機位置傳感器(MPS)來測量定子與轉子之間的相對位置,以確保定子線圈按正確順序通電。電機位置傳感器在啟動時至關重要,因為此時微控制器沒有可用的反電動勢來確定轉子和定子的相對位置。
2020-05-04 16:57:007580 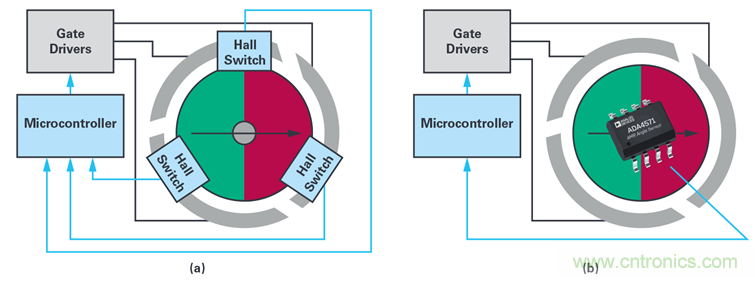
在本文中,我們將討論位置跟蹤器和位置傳感器的定義、核心技術和應用程序之間的差異。 對于工程師而言,位置跟蹤器和位置傳感器中的硬件之間的區別就像是蘋果和橙子之間的差異,盡管有時可以串聯使用它們,但從
2020-05-04 17:32:006086 能代替“臟亂、危險、嚴重”的工作的機器人手臂“Float Arm”
2020-04-20 16:06:486627 新加坡國立大學(NUS)的研究團隊在陳寶炎副教授的帶領下,通過開發新的納米材料應變傳感器系列,大大提高了工業機器人手臂的安全性和精度。與現有技術相比,該應變傳感器在測量運動時更加靈敏。 由NUS團隊
2020-12-23 16:03:332606 了哪些傳感器呢?它們又各自應 用了什么呢?我們往下看看吧! 智能機器人安裝了哪些傳感器 1、??? 內傳感器 機器是機電一體化的產品,內傳感器和電機、軸等機械部件或機械結構如手臂(Arm)、手腕(Wrist)等安裝 在一起,完成位置、速度、
2020-12-31 16:31:359072 在網上有許多關于制作機器人手臂的項目,但他們都有類似的控制方式,我感覺缺少了一些樂趣!所以我們決定制作一個可以使用聊天機器人控制的機器人手臂。如果你說“向左移動 45 度”并且手臂會按照你的指令移動,那么它會有多酷!
2021-03-16 11:47:0030 軟體機器人手臂由于具有本質柔順性和連續變形特性,在智能制造、醫療康復,家庭服務等領域有巨大的研究價值和廣泛的應用前景。最新一期的機器人頂刊《The International Journal
2021-04-13 11:49:163742 機器人手臂的伸縮、橫向移動均屬于直線運動。實現手臂往復直線運動的機構形式比較多,常用的有活塞油(氣)缸、齒輪齒條機構、絲杠螺母機構以及連桿機構等。由于活塞油(氣)缸的體積小、重量輕,因而在機器人
2022-03-17 17:16:42949 電子發燒友網站提供《構建可幫助人們做早餐的桌面智能機器人手臂.zip》資料免費下載
2022-12-28 10:36:413 方案介紹MARK 1是可編程的Arduino機器人手臂。但是,還不止這些,該機械臂可以由手勢控制。硬件部件:Arduino UNO?? ?×?? ?1個?? ?伺服馬達MG996R×?? ?6?? ?5V電池組×?? ?1個?? ?PCA9685具有I2C接口的8通道8W 12V FET驅
2022-12-30 14:42:174 本文將介紹“無刷電機位置傳感器的作用及其布局”相關的內容,這也是在“無刷電機有傳感器驅動和無傳感器驅動的特征及區分使用”中“無刷電機有位置傳感器的驅動”應注意的要點。在無刷電機使用的位置傳感器通常是磁傳感器(霍爾元件,霍爾IC)。
2023-02-15 16:12:074186 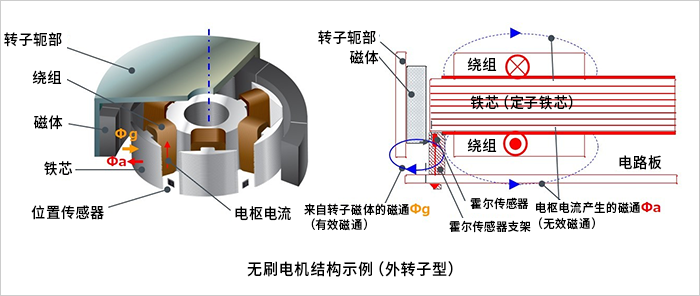
杭州2023年2月27日 /美通社/ -- 近日,史陶比爾集團流體連接器事業部推出機器人手臂末端工具EOAT (End-of-Arm-Tooling) 產品線,自此將能夠為廣大客戶提供一站式自動
2023-03-01 16:12:491132 
電子發燒友網站提供《用于Arduino Due的DIY Braccio機器人手臂護罩.zip》資料免費下載
2023-06-14 15:07:510 、精度高、速度快等優點,因而能夠應用于實時的焊縫跟蹤系統當中。機器人自動化焊接過程中工件的定位誤差、加工誤差和激光傳感器的安裝誤差的問題,線結構視覺激光傳感器獲取焊
2022-01-17 17:58:361645 
電子發燒友網站提供《Scorbot ER-V+自由度機器人手臂控制器和模擬器設計.zip》資料免費下載
2023-07-10 15:08:572 過程帶來了前所未有的精度和可靠性。 創想焊縫跟蹤傳感器 創想焊縫跟蹤傳感器是一種先進的設備,旨在監測焊接過程中的焊縫位置,實現自動化焊接過程的精確控制。它采用機器視覺技術,通過相機和圖像處理軟件,能夠在實時監測
2023-10-13 16:26:49866 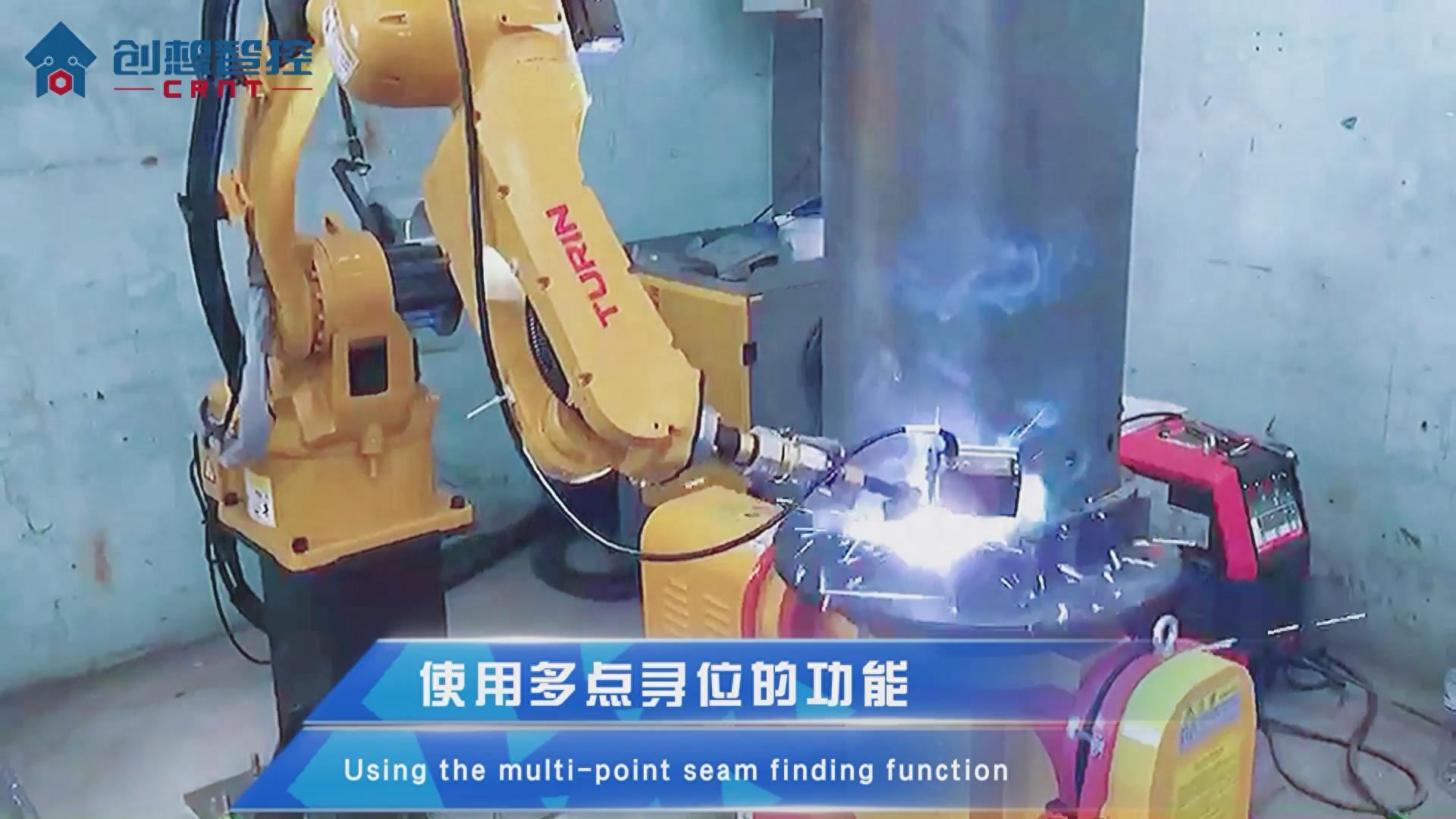
機器人技術處于工業 4.0、人工智能和邊緣革命的前沿。讓我們看看如何創建 FPGA 控制的機器人手臂。
2023-10-24 17:15:332211 
機器人技術處于工業 4.0、人工智能和邊緣革命的前沿。讓我們看看如何創建 FPGA 控制的機器人手臂。
2023-10-24 17:26:202030 
無磁鐵雙線圈技術為機器人、工業和醫療設備中使用的電機位置傳感器及編碼器帶來高分辨率、高精度和高可靠性
2023-10-27 10:00:551386 在現代工業自動化領域,機器人的運用越來越廣泛。在這些機器人中,電弧跟蹤傳感器是一種非常重要的傳感器,能夠幫助機器人實現對電弧的跟蹤和控制。那么,電弧跟蹤傳感器通常安裝在機器人什么位置呢? 電弧跟蹤
2023-11-23 15:02:571320 在焊接過程中,焊縫的準確跟蹤對于確保焊接質量至關重要。傳統的焊接方法可能需要人工干預以確保焊縫的準確對齊,但隨著技術的發展,焊縫自動跟蹤傳感器在焊接領域的應用越來越廣泛。這種傳感器能夠精確地識別
2024-02-21 15:46:041347 
自動化生產線的“命門”——機器人手臂的“停機焦慮”在汽車制造車間的焊接工位,在電子裝配廠的精密貼片環節,在物流分揀中心的高速分撥線上,機器人手臂的突然停機如同多米諾骨牌的第一張牌——輕則導致機械臂卡
2025-07-29 16:07:30411 
不管是工業機器人還是移動機器人,要實現精準的位置控制一定少不了位置傳感器。位置傳感器的種類很多,用在機器人領域的各種的位置傳感器讓機器人在定位精度上不斷向毫米級靠近。在所有用于位置傳感的器件里,往往
2024-03-15 10:20:51
 電子發燒友App
電子發燒友App








 工商網監
工商網監
評論