 機器人手臂5種不同的運動組合
機器人手臂5種不同的運動組合

一般機器人手臂有3個自由度,即手臂的伸縮、左右回轉和升降 (或俯仰)運動。手臂回轉和升降運動是通過機座的立柱實現的,立柱的橫向移動即為手臂的橫移。
手臂的各種運動通常由驅動機構和各種傳動機構來實現。手臂的 3 個自由度,可以有不同的運動 (自由度)組合,通常可以將其設計成如圖 2-34 五種形式。
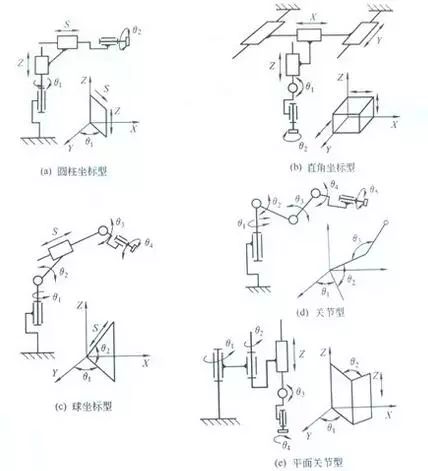
① 圓柱坐標型
如圖 2-34(a)所示,這種運動形式是通過一個轉動,兩個移動,共三個自由度組成的運動系統,工作空間圖形為圓柱形。它與直角坐標型比較,在相同的工作空間條件下,機體所占體積小,而運動范圍大。
② 直角坐標型
如圖 2-34(b)所示,直角坐標型機器人,其運動部分由三個相互垂直的直線移動組成,其工作空間圖形為長方體。它在各個軸向的移動距離,可在各坐標軸上直接讀出,直觀性強,易于位置和姿態的編程計算,定位精度高、結構簡單,但機體所占空間體積大、靈活性較差。
③球坐標型
如圖 2-34(c)所示,又稱極坐標型,它由兩個轉動和一個直線移動所組成,即一個回轉,一個俯仰和一個伸縮運動組成,其工作空間圖形為一球體,它可以作上下俯仰動作并能夠抓取地面上或較低位置的工件,具有結構緊湊、工作空間范圍大的特點,但結構輕復雜。
④關節型
如圖 2-34(d)所示,關節型又稱回轉坐標型,這種機器人的手臂與人體上肢類似,其前三個關節都是回轉關節,這種機器人一般由立柱和大小臂組成,立柱與六臂同形成肩關節,大臂與小臂間形成肘關節,可使大臂作回轉運動θ1和使大管作俯仰擺動θ2,小臂作俯仰擺動θ3。其特點是工作空間范圍大,動作靈活,通用性強,能抓取靠近機座的物體。
⑤平面關節型
如圖 2-34(e)所示,采用兩個回轉關節和一個移動關節;兩個回轉關節控制前后、左右運動,而移動關節則實現上下運動,具工作空間的軌跡圖形,它的縱截面為矩形的回轉體,縱截面高為移動關節的行程長,兩回轉關節轉角的大小決定回轉體橫截面的大小、形狀、這種形式又稱為SCARA型裝配機器人。 結合P29-30的圖選講其中一個工作原理。
機器人手臂的典型機構
(1)手臂直線和回轉運動機構
機器人手臂的伸縮、橫向移動均屬于直線運動。實現手臂往復直線運動的機構形式比較多,常用的有活塞油(汽)缸、齒輪齒條機構、絲杠螺母機構以及連桿機構等。因為活塞油(汽)缸的體積小、重量輕,在機器人的手臂結構中得到的應用比較多。
(2)手臂俯仰運動機構
機器人手臂的俯仰運動一般采取活塞油(汽)缸與連桿機構聯用來實現。手臂的俯仰運動用的活塞缸位于手臂的下方,其活塞桿和手臂用鉸鏈連接,缸體采用尾部耳環或中部銷軸等方式與立柱連接。
-
機器人
+關注
關注
213文章
31320瀏覽量
223388 -
自由度
+關注
關注
0文章
8瀏覽量
10580 -
機器人手臂
+關注
關注
1文章
8瀏覽量
2703
原文標題:干貨 | 機器人手臂的典型機構
文章出處:【微信號:industrial_robot,微信公眾號:國聯視訊工業機器人信息服務】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
為何你的機器人手臂“知覺”存在偏差?探秘力傳感器的奧秘
注意!注意!Profinet轉devicenet與Fanuc機器手臂連接易忽略的小細節

人形機器人爆發背后,一個被忽視的核心技術:機器人運動學控制

TCXO晶振:YXC揚興科技 | 助力機器人運動控制提升方案

【案例分享】電子谷定制通訊線束:人形機器人穩定律動連接方案

高精度機器人控制的核心——基于 MYD-LT536 開發板的精密運動控制方案
用于機器人手臂的基于B3M010C075Z和BTD5452R的三相全橋電機驅動器設計報告
機器人競技幕后:磁傳感器芯片激活 “精準感知力”
生產線不停擺的“隱形衛士”:優比施UPS電源,精準守護機器人手臂零停機




 工商網監
工商網監
評論