隨著工業(yè)機器人技術(shù)水平的提升與應(yīng)用的推廣,工業(yè)機器人上游各零部件及中游集成與制造技術(shù)會進一步細化、深化,工業(yè)機器人的應(yīng)用領(lǐng)域會持續(xù)拓展。而對于我國工業(yè)機器人產(chǎn)業(yè)的發(fā)展核心零部件與專利的布局是不可缺失的部分。
2016-12-19 10:19:11 1144
1144 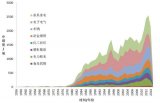
我按下USB插座附近的小洞的按鈕。認為這是拾取板硬復(fù)位。現(xiàn)在拾取停止工作,并列舉我們“AT91 USB到串行轉(zhuǎn)換器”。有辦法修理嗎?
2020-03-20 09:41:04
請各位大神指導(dǎo),移動式機器人是怎么做EMC保護的,機器人是鋰電池供電,所以就不能接大地了,那么對機器人的干擾是通過何種方式來釋放或轉(zhuǎn)移的?
2016-07-26 13:33:14
目前產(chǎn)業(yè)機器人僅能在嚴格定義的結(jié)構(gòu)化環(huán)境中執(zhí)行預(yù)定指令動作,缺乏對環(huán)境的感知與應(yīng)變能力,這極大地限制了機器人的應(yīng)用。利用機器人的視覺控制,不需要預(yù)先對產(chǎn)業(yè)機器人的運動軌跡進行示教或離線編程,可節(jié)約
2015-01-23 15:02:27
的知識,來判定這些零件是不是不良品。某種程度上來說,你可以認為機器視覺是計算機視覺的孩子,因為它使用計算機視覺和圖像處理的技術(shù)和算法。但是,雖然它可以用來指導(dǎo)機器人的,他又不完全是機器人視覺。它更側(cè)重于
2020-08-28 10:48:50
視覺系統(tǒng)成為研究的新課題。1965年, Stanford建立機器人實驗室開始研究機器人。機器人的定義:【機器人】是一種可以用來移動材料,零件,工具或特定裝置的可以重新編程的多功能操...
2021-09-07 08:37:58
labview 視覺機器人抓取工件 CCD相機的二維坐標系的建立?希望分享,謝謝
2017-08-18 20:53:37
機器人的運動原理還是屬于最基本的簡單機械。機器人運動主要是依靠什么裝置?有些什么裝置是機器人用的比較多的?
2015-02-03 11:22:01
機器人關(guān)節(jié)是機器人各個零部件之間發(fā)生相對運動的機構(gòu)。關(guān)節(jié)之中,單獨驅(qū)動的為主動關(guān)節(jié),反之稱為從動關(guān)節(jié)。機器人關(guān)節(jié)模組通常采用超聲波電機、伺服電機、諧波減速器、VR減速器、行星齒輪箱電機等。機器人關(guān)節(jié)
2021-05-27 11:26:11
。
在實際應(yīng)用中,數(shù)控車床能夠加工各種類型的零件,包括螺絲、馬達軸、模型車零件、釣魚具配件、音箱類產(chǎn)品外殼、移動電源外殼等。對于機器人配件而言,數(shù)控車床特別適合加工軸類零件、管類零件、盤套類零件等回轉(zhuǎn)
2025-12-09 18:22:03
。綜合考慮, 使用機器人自動化線更加經(jīng)濟、適用。機械手自動化線適于大間距的壓力機生產(chǎn)線, 同時適用于已有生產(chǎn)線的自動化改造。通過更換端拾器, 機器人自動化生產(chǎn)線可適合多車型的生產(chǎn), 柔性更高。轉(zhuǎn)自:【速加網(wǎng)】--讓零件加工像網(wǎng)購一樣簡單!
2018-11-26 11:59:28
`盡管有很多同學(xué)想?yún)⒓?b class="flag-6" style="color: red">機器人設(shè)計大賽,但是他們卻不知道該如何入手。例如,很多同學(xué)不知道應(yīng)該怎樣設(shè)計機器人,需要采用哪些零部件和原材料,這些材料和零件應(yīng)該怎樣使用,應(yīng)該怎樣加工零部件等等。要制作機器人
2012-01-10 15:49:15
列舉部分學(xué)習(xí)過程中接觸的部分書籍,部分有中文版,部分有更新版本。1.機器人基礎(chǔ)書籍適合入門的書籍:機器人學(xué)機器人建模規(guī)劃與控制機器人學(xué)、機器視覺與控制——MATLAB算法基礎(chǔ)機器人學(xué)導(dǎo)論——分析控制
2019-05-22 06:53:10
數(shù)一般等于關(guān)節(jié)數(shù)目。機器人常用的自由度數(shù)一般不超過5~6個。 2、關(guān)節(jié)(Joint) 即運動副,允許機器人手臂各零件之間發(fā)生相對運動的機構(gòu)。 3、工作空間 機器人手臂或手部安裝點所能達到的所有
2017-08-15 14:00:52
機器人的定義是什么?機器人優(yōu)點和缺點是什么?機器人是由哪些部分組成的?工業(yè)機器人的應(yīng)用有哪些?
2021-07-05 06:48:21
工業(yè)視覺中,機器人視覺領(lǐng)域在技術(shù)和商用程度上均有較好的表現(xiàn)。本文從機器人視覺的市場需求、技術(shù)原理以及發(fā)展趨勢三個層面,深入淺出地闡述了機器人視覺在工業(yè)智能進程中的重要地位。智能制造,機器人視覺,工業(yè)
2019-08-16 04:00:00
機器人的移動通常是從管理機器人總體任務(wù)進度的中央處理器發(fā)出位置變化請求時開始的。導(dǎo)航系統(tǒng)通過制定行程計劃或軌跡以開始執(zhí)行位置變化請求。行程計劃需考慮可用路徑、已知障礙位置、機器人能力及任何相關(guān)的任務(wù)目標。
2019-09-10 10:44:32
機器人調(diào)試的上位機中,舵機復(fù)位時如何讓它可以由用戶自動選擇舵機復(fù)位值?
2014-07-17 08:41:39
視覺技術(shù)是近幾十年來發(fā)展的一門新興技術(shù)。機器視覺可以代替人類的視覺從事檢驗、目標跟蹤、機器人導(dǎo)向等方面的工作,特別是在那些需要重復(fù)、迅速的從圖象中獲取精確信息的場合。
2019-09-04 08:00:27
這一節(jié),就機器人工具箱中的一些常用的函數(shù)做一下簡單的介紹。機器人工具箱在機器人建模、軌跡規(guī)劃、控制、可視化仿真等方面給機器人的研究和學(xué)習(xí)提供便利條件,大大提高了研究和工作效率。在機器人工具箱中,類
2021-09-15 09:04:23
傳感器技術(shù)是仿人機器人研究的關(guān)鍵技術(shù)之一。仿人機器人之所以能在已知或未知的環(huán)境中完成一定的作業(yè)功能,是因為它能夠通過傳感器感知外部環(huán)境信息和自身狀態(tài),獲得反饋信息,實現(xiàn)系統(tǒng)的閉環(huán)控制。目前在仿人機器人
2019-09-18 06:17:46
ZN-RAI02工業(yè)機器人與視覺實訓(xùn)平臺是什么?ZN-RAI02工業(yè)機器人與視覺實訓(xùn)平臺有哪些技術(shù)性能?ZN-RAI02工業(yè)機器人與視覺實訓(xùn)平臺的結(jié)構(gòu)是由哪些部分組成的?ZN-RAI02工業(yè)機器人與視覺實訓(xùn)平臺有哪些配套軟件?
2021-08-09 06:22:03
申請理由:項目描述:利用開發(fā)板所示芯片來控制機械爪,攝像頭,紅外線,超聲波等傳感器,來實現(xiàn)智能垃圾拾取
2016-11-11 09:26:36
作開發(fā)基于機器視覺的工業(yè)機器人抓取工作站,因抓取物品為亂序堆疊的毛坯零件,且零件不唯一,所以需要一定的深度學(xué)習(xí),而出于成本考慮,選用的工控機需求工作穩(wěn)而不執(zhí)行大量視覺計算,故考慮單獨加置視覺處理單元,正好
2019-09-18 14:18:14
申請理由:現(xiàn)在正在參與視覺機器人的項目,想了解更多的關(guān)于機器人的產(chǎn)品與知識。項目描述:水果采摘機器人:機器人尋找視野中的水果,并移動到相應(yīng)的位置,由機械臂進行采摘水果并放到指定的位置。
2015-10-29 11:00:03
傳感器。四足機器人重2.2kg,有8個自由度,四條腿上都搭配了足底傳感器。其他零件由3D打印和現(xiàn)成的零件構(gòu)成,可以做出重量輕且低成本的機器人,這也使得其他研究團隊可以快速開發(fā)和復(fù)制此項目。本文系統(tǒng)地描述了
2021-09-13 06:33:53
正合作開發(fā)基于機器視覺的工業(yè)機器人抓取工作站,因抓取物品為亂序堆疊的毛坯零件,且零件不唯一,所以需要一定的深度學(xué)習(xí),而出于成本考慮,選用的工控機需求工作穩(wěn)而不執(zhí)行大量視覺計算,故考慮單獨加置AI加速器
2019-09-18 19:24:11
拿到一個題目,視覺采摘機器人。目前對視覺處理方面毫無頭緒,由于條件有限,只做出概念實物。機器人只有達到識別該果蔬并采摘下來的效果。有沒有大神提供一下思路。
2018-04-10 09:22:27
的激光安全傳感器。當激光檢測障礙物時,門會立即停止閉合并回縮,以避免碰撞。在機器人行業(yè)里的大多數(shù)安全傳感器也差不多是這樣。(6)零件檢測傳感器在零件拾取應(yīng)用中,(假設(shè)沒有視覺系統(tǒng)),你無法知道機器人
2018-11-08 10:53:12
上游的核心零部件,如控制器、伺服系統(tǒng)、傳動結(jié)構(gòu)、傳感技術(shù)等都掌握在國外廠商手中。在機器人產(chǎn)業(yè)的中游,企業(yè)主要是利用上游零部件設(shè)計機器人結(jié)構(gòu)和控制箱,做一個標準機器人——機器人本體。面對與國外廠商的直接
2015-12-29 15:56:47
什么是機器人控制系統(tǒng)?機器人的運動控制系統(tǒng)包含哪些方面?機器人控制系統(tǒng)的基本功能有哪些?
2021-10-11 09:38:12
的視覺的工業(yè)機器人,能在較為復(fù)雜的環(huán)境下工作;如具有識別功能或更進一步增加自適應(yīng)、自學(xué)習(xí)功能,即成為智能型工業(yè)機器人。它能按照人給的“宏指令”自選或自編程序去適應(yīng)環(huán)境,并自動完成更為復(fù)雜的工作。工業(yè)
2015-01-19 10:58:38
小型物流機器人系統(tǒng)是模擬無人倉庫中的物流機器人系統(tǒng)完成物料自動入庫和出庫,并實現(xiàn)物料信息智能化管理過程的創(chuàng)新產(chǎn)品。PC機作為云端(數(shù)據(jù)庫),通過Zigbee網(wǎng)絡(luò)控制物流機器人執(zhí)行入庫和出庫任務(wù)。云端
2016-04-05 15:16:07
工業(yè)機器人的四大特征是哪些?工業(yè)機器人是由哪些部分組成的?工業(yè)機器人是怎樣進行劃分的?
2021-10-11 09:10:17
,節(jié)約原材料消耗以及降低生產(chǎn)成本,有著十分重要的意義,正在日益改變著人類的生產(chǎn)和生活方式。工業(yè)機器人已經(jīng)廣泛應(yīng)用于汽車及汽車零部件制造業(yè)、機械加工行業(yè)、電子電氣行業(yè)、橡膠及塑料工業(yè)、食品工業(yè)、物流等諸多
2015-09-02 14:03:18
機器人行業(yè)里的大多數(shù)安全傳感器也差不多是這樣。6、零件檢測傳感器在零件拾取應(yīng)用中,(假設(shè)沒有視覺系統(tǒng)),你無法知道機器人抓手是否正確抓取了零件。而零件檢測應(yīng)用可以為你提供抓手位置的反饋。例如,如果抓手漏掉了一個零件,系統(tǒng)會檢測到這個錯誤,并重復(fù)操作一次,以確保零件被正確抓取。本文
2018-10-12 11:02:18
四元數(shù)數(shù)控機器視覺引導(dǎo)系統(tǒng)就是在工業(yè)環(huán)境中引導(dǎo)機器人、測量物品、統(tǒng)計物品、讀取條碼、字母和數(shù)字,以及檢測缺陷。在任何機器視覺應(yīng)用中,無論是最簡單的裝配檢驗,還是復(fù)雜的3D機器人箱子拾取應(yīng)用,通常
2021-11-24 11:32:58
和采集,在汽車零部件、食品、藥品等領(lǐng)域應(yīng)用較多,比如工業(yè)生產(chǎn)過程中的物料配送、分揀、條碼掃描和物流行業(yè)中的快件分揀等;3、定位視覺定位要求機器視覺系統(tǒng)能夠快速準確地找到被測零件并確認其位置,上下料使用機器
2022-02-16 09:52:55
制造出像人一樣具有智能的能替代人類勞動的機器人,一直是人類的夢想,人類獲取的信息80%以上是通過視覺。因此,在智能機器人的研究中,具有視覺的機器人的研究也就成了第一位的。對機器人視覺伺服系統(tǒng)的研究是機器人領(lǐng)域中的重要內(nèi)容之一,其研究成果可應(yīng)用在機器人自動避障、軌跡跟蹤和運動目標跟蹤等問題中。
2019-09-27 08:07:35
視覺系統(tǒng)能夠快速準確的找到被測零件并確認其位置。在半導(dǎo)體封裝領(lǐng)域,設(shè)備需要根據(jù)機器視覺取得的芯片位置信息調(diào)整拾取頭,準確拾取芯片并進行綁定,這就是視覺定位在機器視覺工業(yè)領(lǐng)域最基本的應(yīng)用。4、物體測量
2023-01-04 14:40:06
校正裝置。【背景技術(shù)】[0002]電阻點焊由于在生產(chǎn)過程中能量高度集中、板材變形小、生產(chǎn)效率較高,因此點焊特別適合于薄壁零件的焊接,在車身焊接中得到廣泛應(yīng)用。車身點焊機器人在焊接過程中,其焊接路徑是控制程...
2021-09-02 08:36:52
應(yīng)用對象相結(jié)合后的系統(tǒng),其是硬件和軟件緊密捆綁在一起的系統(tǒng)。將嵌入式系統(tǒng)應(yīng)用于滅火機器人的設(shè)計中,對機器人的性能智能化、網(wǎng)絡(luò)化、小型化都有了明顯提高。比賽用滅火機器人需要機器人有智能較高的自動控制
2019-07-31 06:23:18
組成(臺皮帶線輸送模組、視覺定位及檢測模組、碼垛模組、裝配模組、打螺絲模組、取料模組、機器人TCP標定模組、PC模組等)。通過對該工業(yè)機器人視覺裝配實訓(xùn)平臺的6關(guān)節(jié)機器人和平面關(guān)節(jié)機器人、多功能夾具
2021-07-01 12:05:38
ZN-RAI02工業(yè)機器人與視覺實訓(xùn)平臺一、概述1、ZN-RAI02工業(yè)機器人與視覺實訓(xùn)平臺以工業(yè)機器人與機器視覺為核心,將機械、氣動、運動控制、變頻調(diào)速、PLC控制技術(shù)有機地進行整合,結(jié)構(gòu)
2021-07-01 06:38:35
工業(yè)機器人用于各種應(yīng)用。這些包括:處理:能夠操縱像雞蛋一樣多的車門產(chǎn)品,工業(yè)機器人快速強大,靈巧靈敏。應(yīng)用包括從輸送線到包裝的拾取和放置以及機器傾斜,其中原料由機器人進給到諸如注塑機,數(shù)控銑床和車床
2017-09-07 17:20:32
的2015-2017年的需求量將達到31.98萬套、35.8萬套和40.1萬套。2015-2017國內(nèi)工業(yè)機器人、減速機、伺服電機需求規(guī)模工業(yè)機器人零部件亟需國產(chǎn)化突破,并且是規(guī)模化量產(chǎn)的突破,否則
2018-03-21 20:43:41
工業(yè)機器人的產(chǎn)業(yè)鏈分為上游核心零部件,中游本體和傳感器等生產(chǎn),以及下游的系統(tǒng)集成等。核心零部件是減速機、伺服系統(tǒng)、控制系統(tǒng)三部分,分別對應(yīng)執(zhí)行系統(tǒng)、驅(qū)動系統(tǒng)、控制系統(tǒng),分別占成本的35%、25
2017-08-23 15:10:27
內(nèi)部遠距離運輸組件和零件。 2.智能機器人由于人工智能與機器人技術(shù)的結(jié)合,智能機器人可以利用實時信息優(yōu)化工作。大型數(shù)據(jù)集和實時數(shù)據(jù)也用來訓(xùn)練機器人變得更準確和有效。因此,它們能夠更好地感知周圍的環(huán)境,更快
2022-10-18 14:34:33
`▼并聯(lián)機器人迅速將糖豆放入瓶里 仔細觀看我們可以發(fā)現(xiàn),相同顏色的糖豆放在一個瓶里 并聯(lián)機器人這類設(shè)備主要用于精密緊湊的應(yīng)用場合,競爭點集中在速度、重復(fù)定位精度和動態(tài)性能等方面。 并聯(lián)機器人快速拾取枕包牛奶,放入指定位置 并聯(lián)機器人快速準確拾取物體`
2016-09-14 11:37:02
中國機器人高端智能裝備產(chǎn)業(yè)網(wǎng)獲悉位于南京地鐵3號線夫子廟站的國內(nèi)首個機器人停車庫已經(jīng)建成,在這個停車庫里,停車、取車全都由機器人完成,車主只需原地站在出入口,就可以實現(xiàn)一鍵停車、取車。相信不少人都有
2017-04-10 09:56:53
教你如何從零做一個智能象棋機器人?怎樣去設(shè)計一個基于機器視覺與dobot的象棋機器人呢?
2021-12-23 06:22:11
完成了”。雖然做工極其的“爛”,但是也算是完成了一個讓自己還算是滿意的作品。需要的零件我們對Markdown編輯器進行了一些功能拓展與語法支持,除了標準的Markdown編輯器功能,我們增加了如下幾...
2022-03-02 07:24:39
振動盤和配套的視覺系統(tǒng)FF SIGHT。結(jié)合了柔性振盤的供料技術(shù)、視覺系統(tǒng)FF SIGHT的選料技術(shù)以及機器人取放料的柔性視覺上料系統(tǒng)已越來越多的應(yīng)用于表面鍍層怕刮傷,薄片類零件,異型類零件、多品種共用快速切換等傳統(tǒng)振動盤上料痛點應(yīng)用場景中。更可取代大量人工進行的諸如擺盤等單調(diào)重復(fù)性作業(yè)崗位。`
2020-07-14 13:59:32
、多臺機床或設(shè)備、多個零件存儲裝置等集成 。3、也可以是多臺機器人、多臺機床或設(shè)備、多個零件存儲裝置等集成為一個去執(zhí)行復(fù)雜任務(wù)的功能單元。8 人機交互系統(tǒng)人機交互系統(tǒng)是使操作人員參與機器人控制并與
2018-10-30 15:11:29
機床或設(shè)備、多個零件存儲裝置等集成 。3、也可以是多臺機器人、多臺機床或設(shè)備、多個零件存儲裝置等集成為一個去執(zhí)行復(fù)雜任務(wù)的功能單元。8 人機交互系統(tǒng)人機交互系統(tǒng)是使操作人員參與機器人控制并與機器人進行聯(lián)系
2018-10-30 15:02:58
在物流搬運行業(yè),拳頭機器人由于其獨特的并聯(lián)結(jié)構(gòu),常用于高速整列、裝箱等場合。其中,拳頭機器人的視覺線跟蹤技術(shù)正得到廣泛的應(yīng)用,如下圖所示:
2020-08-06 06:30:31
關(guān)于ros智能機器人,就是一個寫智能機器人代碼的一個虛擬機,
2021-10-13 19:20:16
機器人視覺傳感器詳解一種新型的工業(yè)機器人已經(jīng)走到行業(yè)的前沿, 他們的主要特點是能夠安全地協(xié)助人類工作。在網(wǎng)上有很多人談?wù)撍鼈儯阏J真了解過它嗎?
2020-08-14 07:24:17
一種新型的工業(yè)機器人已經(jīng)走到行業(yè)的前沿, 他們的主要特點是能夠安全地協(xié)助人類工作。在網(wǎng)上有很多人談?wù)撍鼈儯阏J真了解過它嗎?在2008年,很多人愛它們只是處于好奇心。在2012年,機器人被視為
2020-08-17 06:00:49
隨著計算機科學(xué)和自動控制技術(shù)的發(fā)展,越來越多的不同種類的智能機器人出現(xiàn)在工廠、生活當中,機器人視覺系統(tǒng)作為智能機器人系統(tǒng)中一個重要的子系統(tǒng),也越來越受到人們的重視。它涉及了圖像處理、模式識別和視覺
2020-04-07 07:27:24
未來家庭的監(jiān)控機器人應(yīng)該要具備以下特征:1.擬人化設(shè)計,具有可愛的操作接口讓人很容易從遠 端監(jiān)控.2.監(jiān)控機器人可以儲存所看到的影像,并通過遠程傳給家庭主人.3.監(jiān)控機器人本身要有基本的感知
2019-10-30 02:25:39
的研究。金和同事們讓機器人接受一系列的測試,看它能否承受打擊,包括用木槌砸它(如圖),或踩踏它。結(jié)果是機器人存活完好,甚至沒有停止緩慢地前行。 “你可以將它猛甩到地上,它不會散架的,”金說,“機械零件
2015-01-19 14:56:38
定位應(yīng)用視覺定位要求機器視覺系統(tǒng)能夠快速準確的找到被測零件并確認其位置。在半導(dǎo)體封裝領(lǐng)域,設(shè)備需要根據(jù)機器視覺取得的芯片位置信息調(diào)整拾取頭,準確拾取芯片并進行綁定,這就是視覺定位在機器視覺工業(yè)領(lǐng)域
2021-08-19 14:54:21
放料位的位置也會保持不變。 如圖1所示,放置一片模板電芯到CCD下面,視覺抓邊取頂邊與左邊及其交點。以交點做為模板的特征點,左邊做為模板的方向邊。 讓機器人示教一個抓取電芯的點,如圖1所示的這個示
2021-04-07 12:06:47
原來一直用AVR做簡單機器人,但是到后來機器人功能復(fù)雜了就不行了。現(xiàn)在想做有簡單視覺功能的小型機器人,沒有顯示屏,所以沒有GUI的問題。個子小(100mm*100mm*100mm以內(nèi)),重量輕
2020-06-19 09:00:20
到目前為止,機器拾取的工具和方式仍然與手工拾取相似:機械抓取和真空吸取兩種基本模式,只不過機器拾取工具的復(fù)雜性和過程的速度是手工無法比擬的。如圖1所示。 圖1 手工元件拾取的工具和方式示意圖
2018-09-07 15:18:00
我是新人,求幫助啊,明天需要提交輪式機器人應(yīng)用的報告,求大神給點建議,可用輪式機器人應(yīng)用于那些方面,要求實際可行,應(yīng)用于生活,農(nóng)業(yè),軍事都可以,謝謝啦
2013-04-17 16:32:16
公司的酷卡機器人有一個調(diào)零的程序,就是把機器人移動靠近到防護圍欄上的一個傳感器,直到觸發(fā)傳感器動作。在機器人發(fā)生碰撞后就提示要求調(diào)零,但一直沒搞明白這樣做目的是什么,希望知道的朋友指點一下。
2015-01-14 14:35:30
基于DM642的機器人雙目視覺系統(tǒng)設(shè)計
2021-04-02 07:20:41
使用NI視覺硬件和軟件為接線盒零件設(shè)計集成的視覺化和機器人化單元:Cristiano Buttinoni, Certified LabVIEW Developer (CLD) - ImagingLab 行業(yè):Manufacturing, 電子 產(chǎn)品:LabVIEW, 機器視覺附
2010-03-12 10:43:55 25
25 產(chǎn)品介紹 ABB機器人產(chǎn)品線豐富,包括?多關(guān)節(jié)機器人、?協(xié)作機器人、?噴涂機器人、?SCARA機器人以及?自主移動機器人(?AMR)等?多關(guān)節(jié)機器人?:ABB的多關(guān)節(jié)機器人是六軸關(guān)節(jié)型
2024-09-30 17:56:07
使用NI視覺硬件和軟件為接線盒零件設(shè)計集成的視覺化和機器人化單元
2010-03-11 11:33:51660 哈佛大學(xué)過去開發(fā)的機器人Delta手臂通常用在組裝生產(chǎn)線,其速度和靈巧度決定了工作空間需要足夠大,如今哈佛大學(xué)的工程師已經(jīng)開發(fā)出這款通用型機器人的世界最小版本,取名為“MilliDelta”。顧名思義,這款新型機器人的操作級別為毫米級,可以在精細拾取、包裝、制造甚至外科手術(shù)方面提供幫助。
2018-01-22 11:45:475635 據(jù)報導(dǎo),Sick視覺專家Neil Sandhu表示,該系統(tǒng)很容易添加到機器人應(yīng)用中。視覺傳感器將引導(dǎo)機器人拾取隨機定位的物體,并在拾取物體之前檢查或測量物體。
2018-04-19 01:50:033744 在機器視覺檢測過程中,需要夾具對每一個被檢測零件進行定位,保證光源照射到零件,讓相機能拍攝到被照射的零件,使位置傳感器能夠在同一位置進行觸發(fā),防止零件發(fā)生晃動或旋轉(zhuǎn)。當每一個所要檢測的零件到達檢測
2020-05-25 07:30:004095 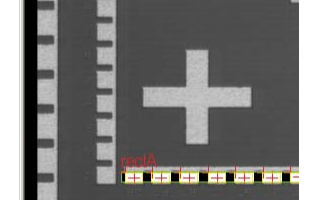
機器人取件系統(tǒng)在大型注塑機復(fù)雜模具方面有成熟廣泛的應(yīng)用,尤其針對取件動作要求較為復(fù)雜、涉及取件后切澆口及表面處理等后續(xù)工藝的作業(yè)要求,機器人靈活的動作活動自由度及編程的便利性凸顯。
2018-10-28 09:14:535845 舒伯特的集成枕包機模塊拾取線相較于機械化枕包機,最多可節(jié)約70%的放置面積,其極為緊湊的機器布局概念建立在公司創(chuàng)始人Gerhard Schubert于80年代就已開始遵循的思維——機器人支持的包裝流程——之上。
2019-03-17 10:17:001000 
昨日,谷歌 AI 在博客介紹了最新成果——投擲機器人 TossingBot,一個能夠在真實、隨機的世界里學(xué)會抓取物體,并扔至習(xí)慣范圍外指定位置的拾取機器人。
2019-03-29 10:51:531545 據(jù)外媒報道,近日,機器人公司RightHand Robotics推出第二代拾取放置機器人系統(tǒng)RightPick 2。
2019-04-09 16:55:192088 基于結(jié)構(gòu)光測量技術(shù)和3D物體識別技術(shù)開發(fā)的機器人3D視覺引導(dǎo)系統(tǒng),可對較大測量深度范圍內(nèi)散亂堆放的零件進行全自由的定位和拾取。相比傳統(tǒng)的2D視覺定位方式只能對固定深度零件進行識別且只能獲取零件的部分
2019-05-26 09:23:579538 客戶在選擇機器人的時候不僅要關(guān)注負載,還要關(guān)注其末端最大工作空間,即機器人末端可達位置點的臂展與最大拾取高度。
2020-03-28 11:30:504511 發(fā)那科機器人的視覺功能作為工業(yè)機器人的眼睛,助力機器人實現(xiàn)更多的應(yīng)用場景,尤其是在分揀應(yīng)用中,它能夠根據(jù)零件的不同作業(yè)以實現(xiàn)工廠對機器人的任務(wù)要求。今天小編整理了關(guān)于FANUC機器人24個視覺功能,我們一起來學(xué)習(xí)!
2020-04-12 11:47:2110054 
選擇機器人夾爪始終是機器人單元設(shè)計中的關(guān)鍵組成部分。您可能需要查看以下技巧,以了解特定零件的夾持器選擇基礎(chǔ)。 夾持器的選擇對于機器人單元集成成功與否至關(guān)重要。您想要一個精確,簡單并且可以處理盡可能多
2020-05-29 14:26:313534 傳感器-機器人標定的目的是建立傳感器坐標系與機器人坐標系之間的聯(lián)系。這種轉(zhuǎn)換是將位于3D點云中的零件坐標(即傳感器坐標)轉(zhuǎn)換為機器人可以通過其運動/編碼器子系統(tǒng)(機器人坐標)執(zhí)行拾取的位姿數(shù)據(jù)。
2020-09-18 16:34:074009 通過視覺定位,每次拾取1塊60mm的餅干碼垛進紙箱中,控制系統(tǒng)根據(jù)視覺檢測的拾取物位置數(shù)據(jù),自動進行五臺機器人的任務(wù)規(guī)劃。 工作環(huán)境:高溫 40℃ 定位原理:視覺定位、動態(tài)跟蹤拾取、定點放置 定位
2020-10-17 09:34:542046 汽車工業(yè)是機器人技術(shù)的主要采用者,并且繼續(xù)使越來越多的過程自動化。隨著OEM及其供應(yīng)商為提高生產(chǎn)率和質(zhì)量而努力,引入視覺功能是增強零件拾取和精確放置或組裝的普遍要求,更多信息盡在振工鏈。
2020-10-22 15:29:252421 1 引導(dǎo)和定位 視覺定位要求機器視覺系統(tǒng)能夠快速準確的找到被測零件并確認其位置,上下料使用機器視覺來定位,引導(dǎo)機械手臂準確抓取。在半導(dǎo)體封裝領(lǐng)域,設(shè)備需要根據(jù)機器視覺取得的芯片位置信息調(diào)整拾取頭
2020-11-20 16:39:495779 闡述了利用機器人視覺進行零件尺寸檢測的系統(tǒng)。包括:機器人視覺系統(tǒng)的構(gòu)成; 工件測量的基本原理;圖像預(yù)處理的基本方法;圖像邊緣特征的提取與具體實現(xiàn)算法。實踐表明,該系統(tǒng)方案是切實可行的,具有較高的使用價值。
2021-03-12 14:27:0027 20多年來,機器視覺的開創(chuàng)者們一直在預(yù)測什么時候能夠出現(xiàn)可以從零件箱中任意揀選零件的機械手。也就是說利用機
2021-03-26 10:51:292856 智能,并可以取代人工,減少勞動力。機器視覺用于質(zhì)量控制檢查已經(jīng)得到了廣泛的應(yīng)用,但是隨著3D傳感器和機械手拾取集成解決方案的出現(xiàn),新的市場正在開拓。不管零件的位置和方向如何,機器人拾取系統(tǒng)都可以隨機抓取物體。3D視覺系
2021-07-28 15:51:514294 電子發(fā)燒友網(wǎng)站提供《基于視覺的自動駕駛拾放機器人.zip》資料免費下載
2022-11-28 09:43:190 在其他領(lǐng)域中,機器人需要以規(guī)定的方式放置所拾取的物體。這種取放方式涉及的應(yīng)用領(lǐng)域包括零件的自動化組裝或后加工處理,其中可能涉及到檢測系統(tǒng),物體被拾取后可能會檢測為不良品。這種方式使得整個自動化過程的效率得到更優(yōu)化。
2022-12-13 11:40:13943 放工作開發(fā)算法,檢測、觸及物品,并對其進行拾取、移動和放置,以便訂單能夠順利完成。企業(yè)資源計劃 (ERP) 系統(tǒng)從系統(tǒng)中接收訂單,并將其傳輸?shù)?b class="flag-6" style="color: red">機器人以便獲取產(chǎn)品。
2023-05-16 09:52:36962 到自動化裝配中,可根據(jù)視覺識別結(jié)果來調(diào)整抓取點坐標及姿態(tài)對零件進行抓取,然后將抓取到零件相應(yīng)的位置和姿態(tài)。弗萊克斯柔性振動盤通過視覺系統(tǒng)引導(dǎo)機器人進行準確定位拾取
2021-08-04 09:43:291453 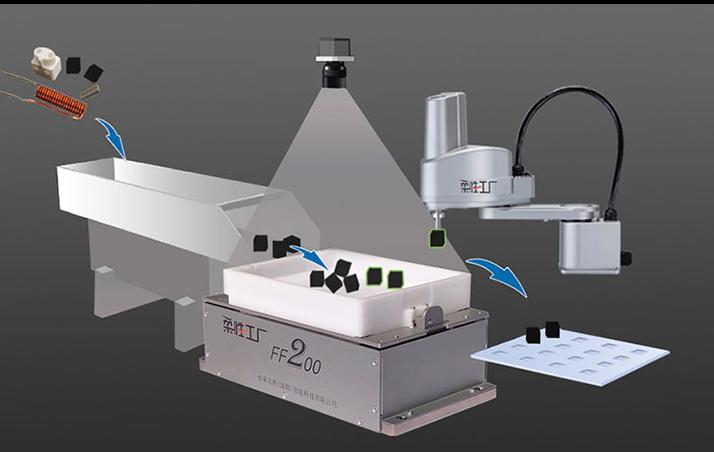
到自動化裝配中,可根據(jù)視覺識別結(jié)果來調(diào)整抓取點坐標及姿態(tài)對零件進行抓取,然后將抓取到零件相應(yīng)的位置和姿態(tài)。弗萊克斯柔性振動盤通過視覺系統(tǒng)引導(dǎo)機器人進行準確定位拾取的解決方案,首先由人工加料到儲料倉,信號
2021-09-14 09:04:501278 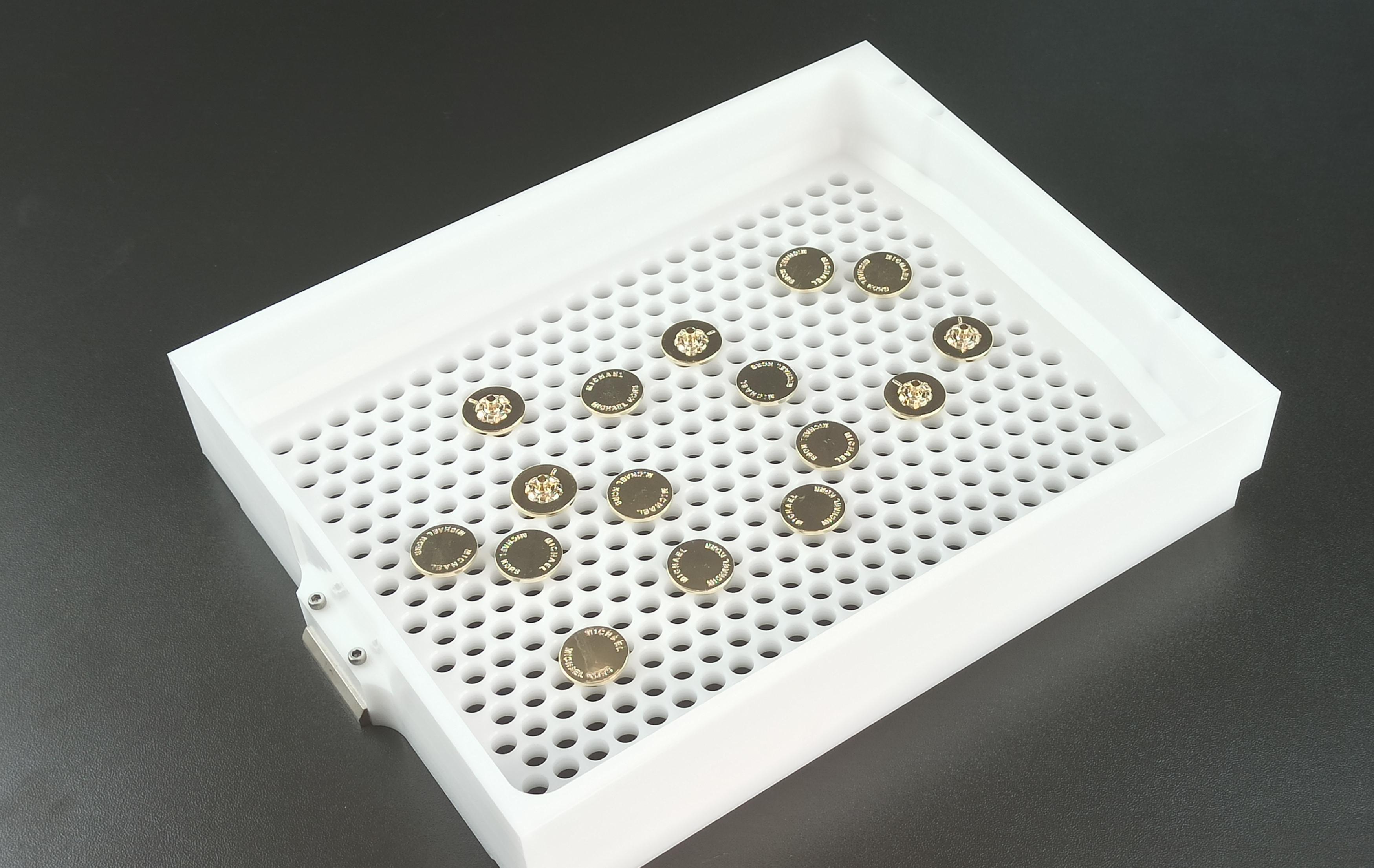
爬壁機器人的零件組成可以根據(jù)不同的設(shè)計和應(yīng)用而有所差異。以下是一般常見的爬壁機器人零件。
2023-08-01 16:15:092803 TeledyneFLIRBumblebeeXBumblebeeX是最新的GigE驅(qū)動立體成像解決方案,為機器人引導(dǎo)和拾取應(yīng)用帶來高精度和低延遲。近日,51camera的合作伙伴
2024-05-07 08:34:171149 
 電子發(fā)燒友App
電子發(fā)燒友App








 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論