PCB設計時DDR線寬和阻抗是怎樣確定下來的呢?讓我們通一個具體的項目來學習一下。
2018-07-06 09:04:47 18405
18405 
由于亞穩態的輸出在穩定下來之前可能是毛刺、振蕩、固定的某一電壓值,因此亞穩態除了導致邏輯誤判之外,輸出在0~1之間的中間電壓值還會使下一級產生亞穩態(導致亞穩態的傳播)。
2022-07-21 14:46:501461 手算法其實就是根據設計要求,把結構定下來之后運用運放的一些基礎知識將MOS管的W/L參數一一定下來的方法,這個方法不一定能設計出很完美的運放,但是對運放的深入理解是很有幫助的。
2023-02-16 15:56:038126 
)才穩定下來的,我選擇他們代理平臺的兩大理由是價錢合理、域名品種齊全,他們的預存款很低,而且沒限制我多久來消費,有時候這行業碰到整頓時期或者現在的金融風暴時期,難免會波及到業務開展,因為時代沒限制我一定
2010-06-28 17:21:52
如上圖給出的原理圖所示:現在測試的AD623在上電的時候REF的基準電壓會緩慢的上升,大概在200S之后會穩定下來;請求大神告訴我這個解決的辦法;
2019-01-02 17:42:43
1.單端輸入和差分輸入都試過,每次上電之后,電容測量值不斷增大或不斷減小,等較長時間后趨于穩定,但再放置一段時間,又會偏移。2.內部溫度傳感器也讀取過,有時候溫度變化和電容變化呈正相關,有時候負相關。想請教一下,有什么方法能讓電容測量值穩定下來。
2023-02-20 09:36:19
FPATH = 1
DRATE0 = 1
DRATE1 = 1
附上測試波形和數據
請幫忙看一下怎么優化可以穩定下來。
2024-11-18 06:12:13
Capture按鈕后。程序會連續采樣4096次。但是從采樣出來的波形看,像是電容還沒有充放電穩定。到2000個點后測試的數據才算穩定下來。
輸入信號的電壓值越大,這個現象越明顯。我剛開始懷疑是ADC前端的電容
2024-12-06 07:03:29
CH246D USB口與快充充電器協議握手失敗,電源一直5-9V之間跳動,不會穩定下來。請問誰知道這什么原因?
2022-09-26 07:16:49
就穩定下來了。由此可見,足夠的環路裕量對于系統的穩定工作,是非常有必要的。通常來說,環路的增益裕量要大于10個db,而相位裕量也要在60度以上。
2、板子布局帶來的問題
電路做好了,電壓值不穩定
2024-06-04 07:11:49
源端口出發到達源寄存器時鐘端口的延遲Tclk2:時鐘從時鐘端口出發到達目的寄存器時鐘端口的延遲Tco:時鐘上升沿到達寄存器到數據從D端輸出到Q端的延遲Tdata:數據從源寄存器Q端到目的寄存器D端的延遲Tclk:時鐘周期Tsu:建立時間,時鐘上升沿到達寄存器前,數據必須提前n納秒穩定下來,這個...
2021-07-26 08:00:03
IO口復用為輸入或輸出,輸入時用作AD檢測,輸出時控制LED燈,低電平有效。兩者切換的頻率有點高!現在出現AD檢測達不到預期,檢測程序是沒錯的!請教大家,IO輸入輸出切換時,需要等待多長時間,IO口才能穩定下來??大家有沒有遇到這種AD檢測問題?
2019-07-18 14:35:47
如上圖所示,圖中,Rp為讀取的ldc寄存器的值(還沒有轉換為電阻值),下面的Fre也是相應的寄存器的值。
可以看到數值慢慢上升然后基本穩定下來,這是什么原因造成的
2024-12-27 07:44:11
LDC1000測量距離的時候,目標金屬改變后大概5s后Rp的數值才穩定下來,怎么修改可以使其更快的穩定下來?求大神指點迷津。
2015-07-28 15:04:38
穩定下來,謝謝。
圖1是OUT0的PWM波,圖2是OUT1的,圖3是這部分的原理圖,參考了DC2155A開發板
2025-04-17 06:59:05
密閉容器內注入一定壓力(比如20Kpa)的空氣,等待一段時間(比如5秒后)穩定下來,檢測容器的壓力。發現輸出ADC一直在緩慢下降,不穩定。
2023-05-16 08:33:06
通截止有點類似pwm波,所以穩定下來的一個電壓就是12v,使得MOS管vgs恒大于導通電壓,不過就是DS兩端壓降比較大,不知道理解的對不對
2018-10-23 20:23:16
PID控制函數不會輸出一個很大的值,這樣就能讓物理量穩定下來。PID調節(速度采樣和控制間隔均為20ms)0.01,0,00.8s0.1,0,00.8s達到目標5,0,0...
2021-09-01 07:30:22
是42m,我的是ad9926,上升沿觸發,那么ad數據也就是在下降沿能夠穩定下來,那我們的dcmi時鐘就配置成下降沿捕獲,至于hsync和vsync兩個腳就配置硬件同步,都是高電平有效,那么將hsync和vsync拉低就可以開啟dcmi了。部分相關代碼dcmi和dma的配置void DCMI_GPI
2022-02-22 06:33:49
,如下圖,調用F2806x_SysCtrl.c中的ExtOscSel();函數,最后發現PID不能穩定下來,震蕩,用的是和內部時鐘源一樣的參數,我用示波器測定時器中斷,也是我設置的100ms。請各位專家
2018-11-21 10:11:57
,不管是20M的輸出,還是100M,200M,用100M帶寬的數字示波器來看,都發現有上下抖動的現象,但用150M帶寬的模擬示波器來看,卻沒有這樣的抖動,波形都很正常。另外,用頻譜分析儀來看200M
2018-12-03 09:11:15
STM32F103C8T6用中斷采集AD677的16位數字信號,采的是2V基準電壓,采出的值在0.5和3之間來回跳。
AD677的參考電壓是5V,AD677采樣時序如下
串口助手得到的數如下,我用fb判斷busy是否為高,用fa判斷busy是否為低,所以fb和fa之間的數就是采出來的數
我用外部中斷檢測SCLK的上升沿,檢測到上升沿就進入中斷,把sdata的值賦給data,采完16位通過usart發到上位機,以下是代碼
#define SAMPLE_HIGH()GPIO_SetBits(GPIOA, GPIO_Pin_4)
#define SAMPLE_LOW()GPIO_ResetBits(GPIOA, GPIO_Pin_4)
#define CLK_HIGH()GPIO_SetBits(GPIOA, GPIO_Pin_6)
#define CLK_LOW()GPIO_ResetBits(GPIOA, GPIO_Pin_6)
#define CAL_HIGH()GPIO_SetBits(GPIOA, GPIO_Pin_7)
#define CAL_LOW()GPIO_ResetBits(GPIOA, GPIO_Pin_7)
#define READ_SDATA()GPIO_ReadInputDataBit(GPIOA, GPIO_Pin_8)
#define READ_BUSY() GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_11)
#define READ_SCLK() GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_10)
#define READ_CLK()GPIO_ReadOutputDataBit(GPIOA, GPIO_Pin_6)
#define ResetCOUNTER() TIM_SetCounter(TIM3, 0)
volatile uint16_t data = 0; // 最終的16位數據
volatile uint8_t bitCounter = 0;// 位計數器
volatile uint8_t dataReady = 0;// 數據就緒標志
void GPIO_ENABLE(uint32_t RCC_APB2Periph, GPIO_TypeDef* GPIOx, GPIOMode_TypeDef GPIO_Mode, uint16_t GPIO_Pin, GPIOSpeed_TypeDef GPIO_Speed)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph, ENABLE);
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed;
GPIO_Init(GPIOx, &GPIO_InitStructure);
}
void AD_Init(void)
{
GPIO_ENABLE(RCC_APB2Periph_GPIOA, GPIOA, GPIO_Mode_AF_PP, GPIO_Pin_6, GPIO_Speed_50MHz);
GPIO_ENABLE(RCC_APB2Periph_GPIOA, GPIOA, GPIO_Mode_Out_PP, GPIO_Pin_4 | GPIO_Pin_7, GPIO_Speed_50MHz);
GPIO_ENABLE(RCC_APB2Periph_GPIOA, GPIOA, GPIO_Mode_IN_FLOATING, GPIO_Pin_8, GPIO_Speed_50MHz);
GPIO_ENABLE(RCC_APB2Periph_GPIOB, GPIOB, GPIO_Mode_IN_FLOATING, GPIO_Pin_10 | GPIO_Pin_11, GPIO_Speed_50MHz);
//A6、tim3ch1初始化,輸出pwm波
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE);
TIM_InternalClockConfig(TIM3);
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStruct;
TIM_TimeBaseInitStruct.TIM_ClockDivision = TIM_CKD_DIV1;
TIM_TimeBaseInitStruct.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInitStruct.TIM_Period = 1000 - 1;//ARR
TIM_TimeBaseInitStruct.TIM_Prescaler = 4 - 1; //PSC,18kHz
TIM_TimeBaseInitStruct.TIM_RepetitionCounter = 0;
TIM_TimeBaseInit(TIM3, &TIM_TimeBaseInitStruct);
TIM_OCInitTypeDef TIM_OCInitStruct;
TIM_OCStructInit(&TIM_OCInitStruct);
TIM_OCInitStruct.TIM_OCMode = TIM_OCMode_PWM1;
TIM_OCInitStruct.TIM_OCPolarity = TIM_OCPolarity_Low;
TIM_OCInitStruct.TIM_OutputState = TIM_OutputState_Enable;
TIM_OCInitStruct.TIM_Pulse = 500;//CCR
TIM_OC1Init(TIM3, &TIM_OCInitStruct);
//TIM_Cmd(TIM3, ENABLE);
}
void PB10EXTI_Init(void)
{
//B10、EXTI
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO,ENABLE);
//設置IO口與中斷線的映射關系
GPIO_EXTILineConfig(GPIO_PortSourceGPIOB,GPIO_PinSource10);
//初始化線上中斷
EXTI_InitTypeDef EXTI_InitStruct;
EXTI_InitStruct.EXTI_Line = EXTI_Line10;
EXTI_InitStruct.EXTI_LineCmd = ENABLE;
EXTI_InitStruct.EXTI_Mode = EXTI_Mode_Interrupt;
EXTI_InitStruct.EXTI_Trigger = EXTI_Trigger_Rising;//上升沿觸發
EXTI_Init(&EXTI_InitStruct);
//配置中斷分組
NVIC_InitTypeDef NVIC_InitStruct;
NVIC_InitStruct.NVIC_IRQChannel = EXTI15_10_IRQn;
NVIC_InitStruct.NVIC_IRQChannelCmd = ENABLE;
NVIC_InitStruct.NVIC_IRQChannelPreemptionPriority = 1;
NVIC_InitStruct.NVIC_IRQChannelSubPriority = 0;
NVIC_Init(&NVIC_InitStruct);
}
void EXTI15_10_IRQHandler(void)
{
int8_t temp;
// static uint32_t lastCaptureTime = 0;
// uint32_t currentCaptureTime;
if(EXTI_GetITStatus(EXTI_Line10) != RESET)
{
EXTI_ClearITPendingBit(EXTI_Line10);//重置標志位
//currentCaptureTime = TIM_GetCapture1(TIM1);
//for(volatile int i = 0; i < 25; i++);
// 接收一位數據
if(bitCounter < 16)
{
// 將讀取的位存入capturedValue
data = (data << 1) | READ_SDATA();
bitCounter++;
// 當收到16位數據時設置數據就緒標志
if(bitCounter == 16)
{
dataReady = 1;
bitCounter = 0;// 重置位計數器,準備下一次接收
if(dataReady == 1)
{
temp = (data >> 8) & 0xFF;//高8位
Serial_SendByte(temp);
temp = (data & 0xFF);//低8位
Serial_SendByte(temp);
//Serial_SendByte(0xF7);//發送完成
dataReady = 0;//重置標志位
}
}
}
//lastCaptureTime = currentCaptureTime;
}
}
2025-04-28 17:17:15
新手上路,初學xc878,正在做示波器,遇到不懂問題急需各位解決。單片機對頻率進行采樣,AD轉換后與PC通信,在PC端利用Labview顯示波形,怎么設計觸發電路使得Labview顯示的波形穩定下來。還有如何使之水平、垂直移動。{:4_107:}
2013-08-30 17:31:45
控制著這個預讀取并計算基準氣壓的量calibratingB。在主文件內面定義的值是200,我覺得這個還不夠,還要更大才能讓氣壓計穩定下來,但是,由于氣壓計讀數很慢,每次要20ms(MWC里面設置
2015-02-06 22:50:28
拉電阻2.0淺談上下拉電阻思考:上下拉電阻有什么用呢?答:上下拉電阻的作用非常簡單,就是將一個不確定的信號確定下來。通過上拉電阻將不確定的信號鉗位到高電平,通過下拉電阻,將不確定的信號鉗位到低電平
2022-01-14 06:50:45
為啥我讀取MPU6050的數據,上電之后20秒左右數據才能穩定下來?
2020-10-12 12:04:23
),高值為60253(十進制,對應2.903mV),但是幾分鐘之后,ADC采樣結果逐漸往上漂移,最終要到120W+(十進制)才會穩定下來。設備掉電重啟后恢復正常,但是過幾分鐘又出現上述情況,請問這種情況可能是由什么原因導致的。該如何改進?下方圖片為抓包數據:
2024-11-26 08:35:30
您好!我使用的PSoC套件與CY8C3666(ES2硅)我必須使用DAC,但是輸出信號很奇怪(見附件)。當我把DAC設置成一個新的值時,它不會像小于5s那樣穩定下來。DAC輸出直接輸入1M范圍的輸入
2019-09-19 07:30:08
最近在做pmsm電機的foc算法,但是電流環一直沒辦法穩定下來,電流采樣有很多毛刺
是否需要在程序中加入濾波算法呢
2024-04-01 07:48:50
設定溫度并能夠穩定下來,想采用PID控制,但本人小白一個,不咋明白,在Labview給定的例程中不明白該怎樣把溫度和功率值達成鏈接,如果有懂得大神希望能指導一下謝謝。。
2021-08-28 15:03:24
技術的日趨成熟,存儲器價格會回穩.然而就DRAM市場來說,誰也不知道DRAM的供貨何時才會穩定下來.再來看市場需求狀況,雖然有些存儲器市場分段的市場需求正在增長,但是這些分段的增長幅度并不高,可見主要的問題是來自于供給側.
2019-07-16 08:50:19
已知交流輸入電壓波形和輸入電流波形如何求輸入電阻是有效值?
2015-01-13 15:44:19
今天tpu拿出一塊2440板子調試,發現盡管采取了種種措施,USBHOST總是會偶爾不工作.把UCLK通過CLKOUT0引出,用示波器查看,發現不工作的時候,UCLK根本就沒有穩定下來.于是仔細思考
2021-08-09 08:12:26
(鋁箔不動)時,每次運行程序得到的峰值應該相同,但實際每次運行得到一個峰值(如1.2V),停止,再運行,得到的峰值就變了(如1.6V)!!怎么能讓采集值穩定下來?急求大神指點可能的原因!!!!謝謝啦。
2016-05-23 16:37:14
能開,正常,有時候開不了)但是輸入端繼電器動作,沒有輸出,電源指示燈不亮,2-并連使用時,先開另一臺好的單機再開故障機,就可以正常使用。
求助,大神們,有遇到過這樣的么?有沒有方法,可以讓故障穩定下來,現在故障出現的很少??急啊 大神們
2016-04-22 09:37:35
小弟只能做到采多個幀ID,但是節點發送時間不同會有重復的。我想把所有節點的幀ID顯示出來該怎么做呢?就是讓幾個循環的數固定下來。下圖是論壇一位大哥的例子,數據可以采出來但是只能循環顯示不能固定下來。
2018-04-13 00:08:37
仿照著戰艦板,自己做了一塊精簡的板子,結果出現了液晶屏抖動的問題,根本不穩定下來。奇怪的是,插上JTAG,就穩定了,毫無抖動產生!自己分析了一下原因,大概有兩個方面吧:1.硬件設計上有個錯誤,把去耦
2019-05-15 01:48:25
都還在變化,但速度已經非常的慢,有時候會緩慢的減小,總之就是不能穩定下來,對于放大的信號是IN+和IN-都是2.5V左右,兩個之間的差值是零點幾個毫伏,輸出信號的值主要在mv級跳變,但是由于其總是朝著一個方向漂移,所以一段時間后的累積變化會相對較大,所以不知道大家有沒有什么解決方法呢?
2018-10-12 09:39:36
后都還在變化,但速度已經非常的慢,有時候會緩慢的減小,總之就是不能穩定下來,對于放大的信號是IN+和IN-都是2.5V左右,兩個之間的差值是零點幾個毫伏,輸出信號的值主要在mv級跳變,但是由于其總是朝著一個方向漂移,所以一段時間后的累積變化會相對較大,所以不知道大家有沒有什么解決方法呢?
2023-11-23 06:35:20
二檔開關閉合的瞬間電壓能去到270V左右,穩定下來的電壓是12.7V左右,這個濾波電路該怎么設計啊,總不能用耐壓那么高的電容啊,我是只小白新手,希望有高人能指點一下~
2016-04-09 10:41:45
得不錯(目前只熟悉C語言,其他語言學過一些,但現在忘了。我對各種編程語言都很感興趣,上手很快),喜歡研究各種算法。通過對這兩款單片機的運用,應該很快能上手其他51內核的單片機。(等工作穩定下來之后想往更高
2016-04-28 10:15:45
請問labview采集的直流電壓要如何使它穩定下來,電壓幅值0-30mV,顯示數值時示數值跳動很大,求幫助,十分感謝!
2013-10-08 18:16:32
值,第三條是除 128 以后的(舍去了7bit 以后),但是經過 40 分鐘后,采樣值一種在上升,不能穩定下來。
希望有技術幫忙分析一下,問題可能出在哪兒。
600+ 的瀏覽量了,就是官方技術講一下
2025-11-19 10:42:25
請問在對AD9361進行改變本振控制的時候,從AD9361接收到命令到本振穩定下來需要的時間是多少,在數據手冊上沒找到。
2018-10-25 09:27:02
Jlink的穩定下載速度是多少
2023-10-28 06:51:37
就穩定下來了。當然,即使驅動電壓沒了,依然保持閉合。 加上的電阻大概是線圈電阻的兩倍,390歐的電阻,200歐的線圈。電容是150uF,25V.
2021-02-23 16:43:20
Microchip Technology Inc. 推出的MCP120/130 均為電壓監控器件,設計用于使單片機保持在復位狀態,直到系統電壓達到適當的電平并穩定下來。當供電電壓跌落到安全工作電平以下
2008-06-10 10:05:49 13
13 電壓變化不定時),VOUT引腳通過一個低阻抗路徑箝位在0 V。為避免此時A3的輸出短路變為0 V,傳輸門G1也會打開。這種狀況會一直持續到電源穩定下來并向DAC寄
2023-03-06 14:05:11
之前,電源必須穩定下來。利用ADM181x系列,可以確保系統復位并開始安全初始化系統之前,電源具有150 ms(典型值)的穩定時間。ADM181x系列微處理器復位
2023-04-13 11:27:15
穩定下來。利用ADM181x系列,可以確保系統復位并開始安全初始化系統之前,電源具有150 ms(典型值)的穩定時間。ADM181x系列微處理器復位電路采用低成本
2023-04-14 11:34:00
之前,電源必須穩定下來。利用ADM181x系列,可以確保系統復位并開始安全初始化系統之前,電源具有150 ms(典型值)的穩定時間。ADM181x系列微處理器復位
2023-04-14 11:43:23
之前,電源必須穩定下來。利用ADM181x系列,可以確保系統復位并開始安全初始化系統之前,電源具有150 ms(典型值)的穩定時間。ADM181x系列微處理器復位
2023-04-14 11:51:25
隧道二極管雙穩態電路
圖4(a)為雙穩態電路,它有兩個穩定的靜態點Q1及Q3和一個不穩定點Q2(見圖4(b))。當接通電源后,電流增至IQ1就穩定下來。設觸發脈沖U2經過Rs
2010-03-29 22:45:081804 
顯示屏上有不斷抖動的波形,為什么波形總是在抖動呢?我們常常看到示波器的觸發選項里有各種觸發方式,在設置觸發方式后波形還是不能穩定顯示,是示波器不能滿足測試需求還是設置不正確呢,到底怎么設置才能使波形穩定顯示呢?
2016-11-05 01:36:3921654 
小智覺得蘋果最近應該會很頭疼,為啥類,一開始iPhone6s換電池快讓蘋果電池庫存都要見底了,還好最近該問題也算是穩定下來,但iPhone7 plus的相機問題最近又被曝了出來,不過小智覺得這些問題對蘋果來說并沒什么大不了的,又不是第一次出現了。
2016-12-28 13:57:1176135 saber仿真電路最主要的就是看電路某些點的電壓電流波形,當仿真后,得到波形了,波形如何處理才更好得分析電路呢?下面介紹下。
2017-12-08 11:37:4626571 
目前中國制造業的特征在這三個點上都反映了,第一產品投入使用初期故障率很高,第二久久不能把故障率穩定下來,第三壽命還很短,所以這些問題交織在一起反映了企業的可靠性工程的實踐出了問題。浴盆曲線就是這么一個有關故障發生概率和統計規律的曲線。
2018-04-03 09:44:4512308 
怎么采集脈動波形利用12864顯示出來 ,哪位老師有思路?波形如下
2018-05-24 09:46:29792 MCP102/103/121/131 均為電壓監控器件,用來使單片
機保持在復位狀態,直到系統電壓達到可供系統穩定工
作的適當電平并穩定下來。表 1 給出了這些器件的特
性。
2018-06-30 10:21:006 今年上半年,Dhyana處理器開發商首次向Linux社區提交代碼,大家才注意到Dhyana處理器的存在,意味著兩年前海光公司與AMD的合作開始有實際產品了。
2018-09-29 15:43:242455 股票漲漲跌跌的特斯拉最近似乎終于安分了下來,穩定下來的特斯拉除了加緊時間解決產能問題外,還準備推出新款車型——搭載“中距離”電池的Model 3,目前根據外媒消息,這款新版本的Model 3補貼前價格定在4.5萬美元(約合人民幣31.5萬)。
2018-10-25 10:30:241070 用示波器捕捉了一個未知信號,波形卻在不斷抖動,以致眼花繚亂不知所措?如何能讓波形乖乖聽話穩定下來,該調檔位還是換觸發?
2019-01-30 10:55:095509 
在買車的時候我們可能看過車的簡介,有方向盤助力,還有剎車助力是什么東西?他不同于電子注冊開車的時候,當我們把剎車踩到底的時候,我車都停下來那一瞬間會頓一下,然后車就完全穩定下來了。這時候我們才著剎車不動,騎車也是不會動的。但我這里說的是自動擋的車。
2019-02-18 11:48:233570 據彭博社報道稱,華為一直在高端市場穩步奪取蘋果和三星的市場份額,尤其是在中國本土市場。蘋果本周預計的季度銷量超出分析師預期,表明iPhone需求在經過了令人失望的購物季后已經穩定下來。
2019-05-07 08:46:09679 Bitcoin SV現在剛分裂出來不久,其理念是希望做到在工程學上穩定,將協議固定下來,但現實情況是代碼需要大量修改才能實現最終的穩定。
2019-10-21 15:14:031756 粗略一看,過去一個月的哈希率已經穩定下來。同樣,這可能是S9被淘汰并升級為更新,更高效的設備的結果。盡管最近出現這樣輕微程度的穩定狀態
2019-11-14 11:08:361299 將現場的設備安裝、空間環境等通過流程化生產的方式確定下來。使得產品的運行可靠性受環境影響的因素降到最低,提高系統的運行穩定性。
2020-07-28 17:16:462749 工作負載也在發生變化。“對于移動應用處理器來說,這是第一大批量產品,一般架構似乎已經在8個核心的集群上穩定下來了--至少目前是這樣,”Cadence公司Tensilica IP高級集團營銷總監Larry Przywara說。“我們看到的是,做視覺和AI類型的工作負載的核心數量正在上升。”
2020-09-25 11:26:062125 今年的手機市場競爭還是蠻激烈的,尤其是手機市場進入到下半年之后,競爭力度逐漸進入白熱化階段,原因就是手機廠商已經在上半年的市場中穩定下來了。
2020-11-03 15:29:353147 等等,不是說好的C端0V,A端10V么?咋就變成結果是A端=C端=10V了?你可以把這個理解成初始狀態,當最后穩定下來之后就會變成A端=C端=10V。
2020-11-20 09:52:102610 從爆發前期的各種物資援助,到后面的全民宅家、全民防控,和到如今的疫情控制慢慢穩定下來,開始復工復產,我們能看到物聯網技術在各方各面都有較好的應用,幫助解決疫情中的各種問題。
2020-12-25 17:20:04658 電子發燒友網為你提供PCB設計時DDR線寬和阻抗是如何確定下來的呢?資料下載的電子資料下載,更有其他相關的電路圖、源代碼、課件教程、中文資料、英文資料、參考設計、用戶指南、解決方案等資料,希望可以幫助到廣大的電子工程師們。
2021-04-11 08:45:127 選用該曲線作為控制系統質量指標的理由是:它第一次回復到給定值較快,以后雖然又偏離了,但偏離不大,并且只有極少數幾次振蕩就穩定下來了。定量的看,第一個波峰B的高度是第二個波峰B‘高度的4倍,所以這種曲線又叫做4:1衰減曲線。
2021-06-13 16:40:0026729 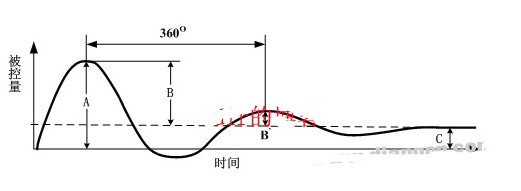
我們常常看到示波器的觸發選項里有各種觸發方式,在設置觸發方式后波形還是不能穩定顯示,是示波器不能滿足測試需求還是設置不正確呢,到底怎么設置才能使波形穩定顯示呢?今天安泰測試就給大家分享一下。
2021-08-06 11:22:3221662 振蕩器起振后,因為電路的正反饋,振蕩幅度不斷增加,差分放大器的跨導不斷減小,差分放大器的放大倍數不斷減小,振蕩幅度的增加變慢,最終晶體管進入截止區,幅度增加到最大而穩定下來。
2022-11-03 15:29:594824 
一是,未來很長一段時間在智能化領域,我們都將經歷“科研、算力、基礎架構、工程、數據、解決方案”這個循環的快速迭代;流動性、創新性短期不會穩定下來,而是會越來越強。
2023-02-14 09:13:342467 折彎系數早期是沒有計算方法的,工廠都是根據實際經驗確定下來的經驗公式。
2023-05-10 11:40:404996 
示波器波形抖動一般來說是兩種原因,其一是因為信號沒有同步,也就是示波器觸發設置的問題;還有一種是信號本身沒有規律,呈現非周期變化,無法找到合適的觸發方式,這樣信號也就無法穩定顯示。如上圖所示其實一個
2022-01-05 16:55:362817 
在單片機項目開發過程中,經常會出現一個有趣的問題,即弄清楚如何延遲代碼執行。有時,[單片機開發]人員可能只是希望有10微秒的延遲,以使I/O線在讀取之前穩定下來,或者可能希望在兩次讀取之間指定的時間間隔使它反跳。在本文中,我們將探討五種延遲代碼執行的技術。
2023-07-10 10:43:173189 報告指出,雖然問題在短期內已經穩定下來,但由于其復雜性和不斷變化的因素,供應鏈仍在發生轉變,包括轉向電動汽車 (EV) 生產、新的監管和政府政策以及軟件定義汽車的采用
2023-09-14 16:17:15936 VLOOKUP是Excel中的一種查找函數,用于在一個數據范圍中查找指定值,并返回與其對應的值。在使用VLOOKUP函數時,有時我們希望查找的數據能夠固定下來,以保證數據的準確性和穩定性。下面是一篇
2023-12-01 10:16:2513913 才能穩定下來。因此,檢測元件及其偏置電路必須處于"始終接通"狀態。此外,對于使用單節AA電池的消費電子應用,所需的偏置電壓通常非常低。
2023-12-07 18:15:031353 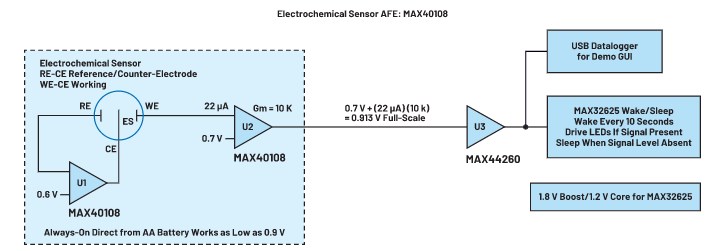
Buck電路的輸出電壓穩定是通過反饋控制實現的。具體而言,Buck電路中通常使用反饋回路來監測輸出電壓并進行調節,以使輸出電壓穩定在設定值。
2024-01-12 14:04:216028 盡管任然取得部分效果以降低行業不景氣帶來的影響,然而由于市場庫存清理和需求縮水導致訂單減少,汕頭超聲印制板第三工廠的生產線也還未完全穩定下來,產品結構亦不及預期,因此經營出現嚴重赤字,這些因素導致了整體營收和盈利的下滑。
2024-03-28 15:48:482310 浪涌波形是在電路中由于突然斷開或接通負載導致的瞬時高能量脈沖信號。這種波形具有高峰值、短脈沖寬度和快速上升時間的特點,因此需要特殊的高壓探頭來進行準確測量。在選擇高壓探頭時,需要考慮探頭的帶寬
2024-05-24 10:43:45984 
 電子發燒友App
電子發燒友App









 工商網監
工商網監
評論