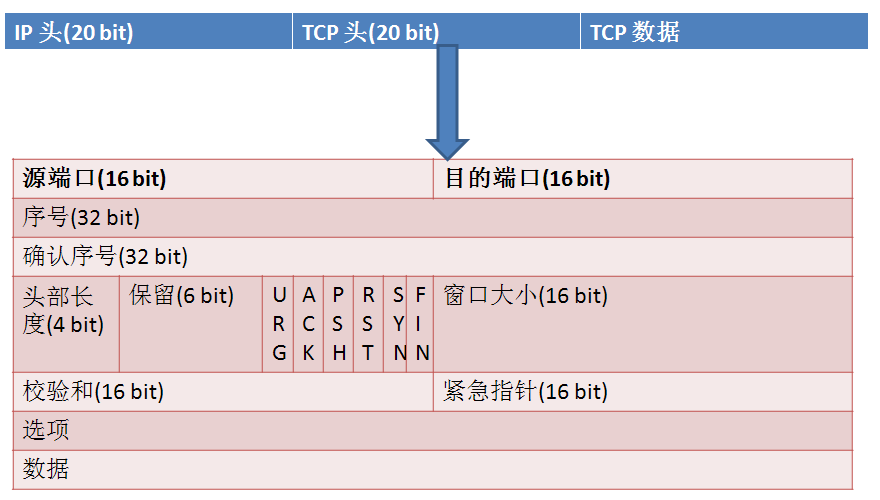
STM32串口通信過程詳解
半雙工:允許數據在兩個方向上傳輸。但是,在某一時刻,只允許數據在一個方向上傳輸,它實際上是一種切換方向的單工通信;它不需要獨立的接收端和發送端,兩者可以合并一起使用一個端...
使用USB轉串口注意事項
USB轉串口設備,都是直接拿來用,驅動裝好后,看到設備管理器有COM端口了,就直接用了。 其實文中開頭速度慢,可以進行以下設置。...
值得收藏的CAN總線故障檢修方法!
最近很多師傅問儀表功能全部失效,沒轉速,沒水溫等等,故障碼報的是通訊故障,那么CAN通訊故障如何檢修呢? CAN線是兩根線攪在一起,CAN高的電壓在2.6伏左右;CAN低的電壓在2.4伏左右;兩根線...
AT32 MCU DVP應用筆記
數字攝像頭并行接口(DVP)用于捕獲CMOS影像攝像機所輸出的并行數據。依據攝像機輸出,可選擇以硬件同步模式或內嵌碼同步模式進行幀同步與行同步。依使用需求,可透過幀率控制,調節每秒捕...

工業通訊總線RS485和RS232
RS-232 標準接口(又稱 EIA RS-232) 是常用的串行通信接口標準之一, 它是由美國電子工業協會(Electronic Industry Association, EIA)聯合貝爾系統公司、 調制解調器廠家及計算機終端生產廠家于 1 970 年...
CAN與CAN-FD主要區別概述
BRS:表示位速率轉換,該位隱性時,速率可變(即BSR到CRC使用轉換速率傳輸),該位為顯性時,以正常的CAN-FD總線速率傳輸(恒定速率)。...
CAN FD協議及其與CAN2.0的異同
我們知道了, CAN2.0數據段只有8byte,最高速率為 1Mbit/s,通常使用的是 500k,隨著功能的逐漸增多,各 ECU 之間的信息交互也越多,導致總線負載持續走高;CAN 報文中只有約 40~50%的帶寬用于實際...
CAN總線是數字信號,還是模擬信號?
CAN是控制器局域網絡(ControllerAreaNetwork,CAN)的簡稱,是由以研發和生產汽車電子產品著稱的德國BOSCH公司開發的,并最終成為國際標準(ISO11898),是國際上應用最廣泛的現場總線之一。...

YC-CK6869藍牙立體聲模塊的接線方式
2個白色接口分別接2個3~5W的揚聲器(也可以當單聲道來用,直接1個揚聲器接口另一個空著就行),揚聲器的阻抗不要求(2歐姆4歐姆8歐姆都可以)。...
2022-11-19 標簽:藍牙模塊 4340
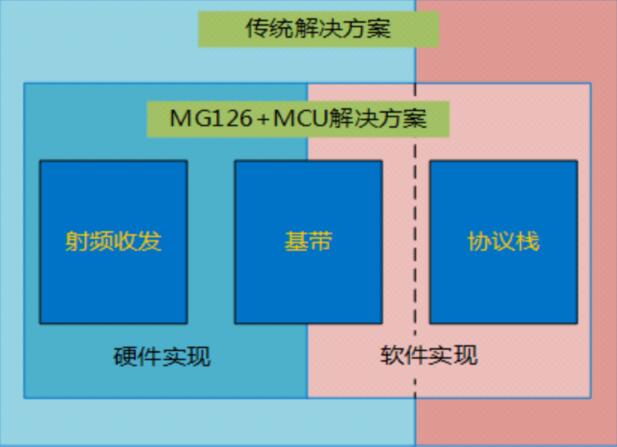
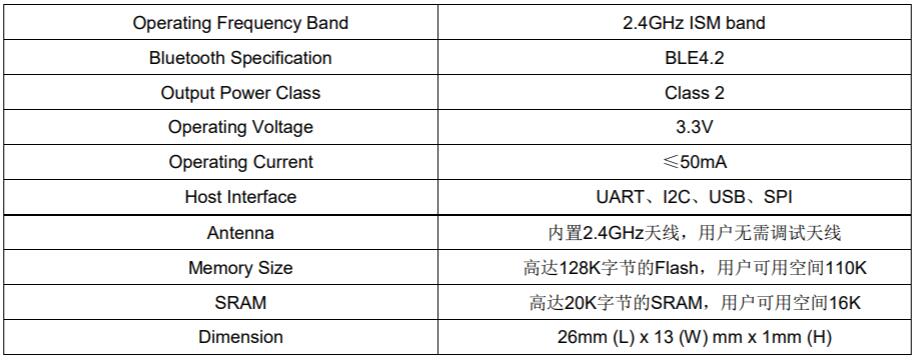
MG126和MG127系列射頻芯片的功能和特點
射頻芯片對應的協議棧設計精簡。協議棧如果用軟件來實現,并運行在MCU上的情況下,代碼和程序所占用的空間和運算量會影響MCU的應用程序的開發能力,也會是MCU生態最大的考量。...
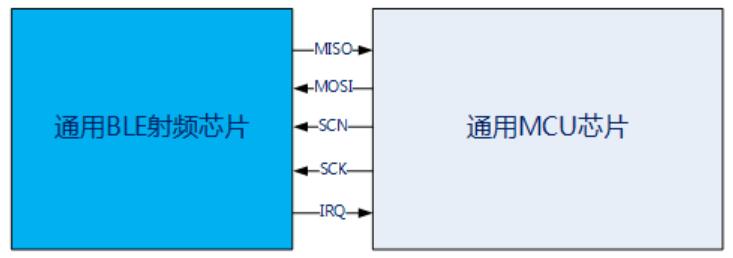
如何可以給現有MCU快速增加BLE功能呢
MG126面向MCU芯片生態,根據應用和功能需求的不同,搭配合適資源的MCU芯片,節省成本,提供高性價比的解決方案,靈活適應物聯網的碎片化應用。...
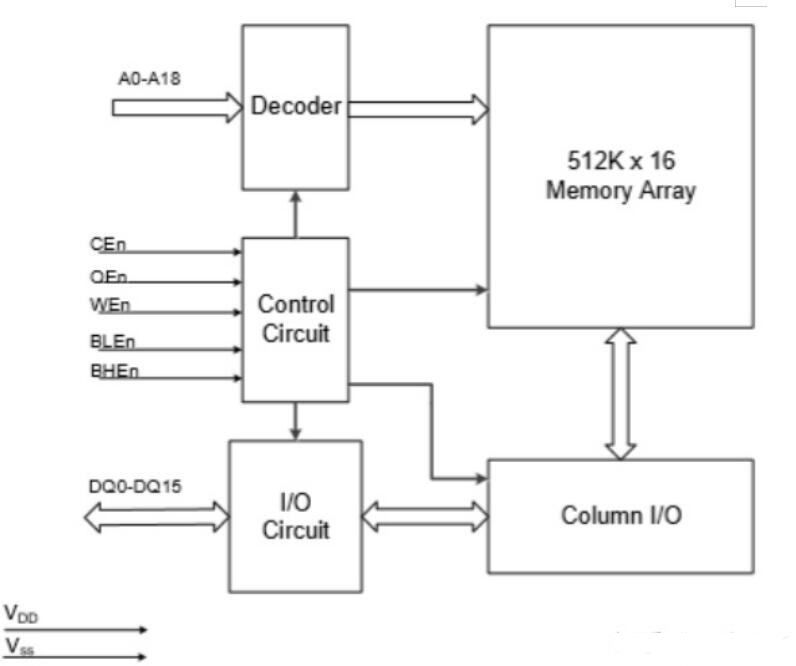
使用STM32F4來驅動XM8A51216實現對XM8A51216的訪問控制
CEn是芯片使能信號,低電平有效;OEn是輸出使能信號,低電平有效;WEn是寫使能信號,低電平有效;BLEn和BHEn分別是高字節控制和低字節控制信號...
汽車四種主流的車用總線技術詳解
車用總線就是車載網絡中底層的車用設備或車用儀表互聯的通信網絡。目前,有四種主流的車用總線:CAN總線、LIN總線、FlexRay總線和MOST總線。...
2022-11-18 標簽:總線 5542
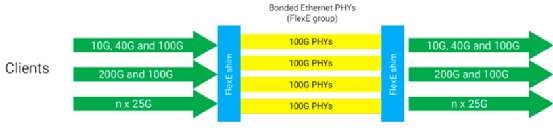
OTN承載FlexE的以太網PHY接口描述
在這種情況下,OTN不知道FlexE,這種模式下使用的是FlexE的捆綁功能。例如,這種情況下,OTN網絡不區分是否是FlexE數據,傳輸網絡按照PCS編碼進行透明傳輸。...
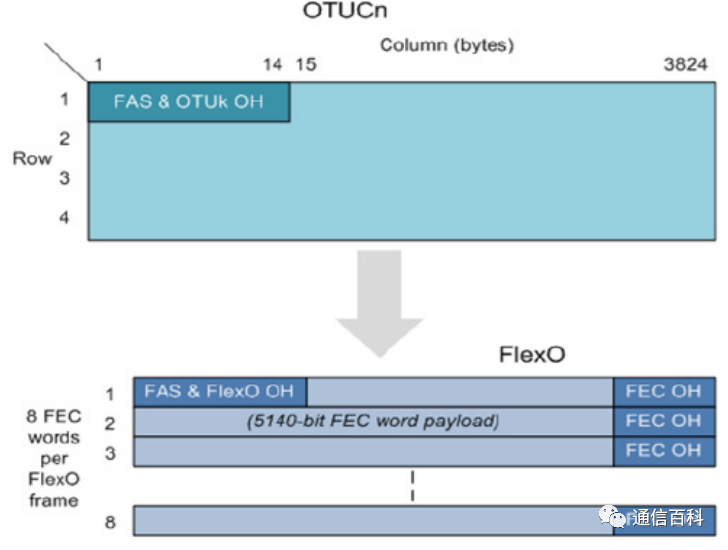
G.709 OTN覆蓋了100Gbit/s,OTU4以外的速率
我們知道傳統標準的SDH和OTN速率是以四倍為基準的,比如說STM-1到STM4,再到STM-16,又比如ODU1到ODU2再到ODU3,可能有同學會問為什么不從ODU0開始說,其實這個速率也是在后面才加入進來的。...
歐盟統一充電接口 iPhone14系列或成最后Lightning接口產品
目前最新的消息顯示,蘋果方面不會等到最后可能的時刻,iPhone 14系列應該是家族中最后一個帶Lightning接口的產品。...
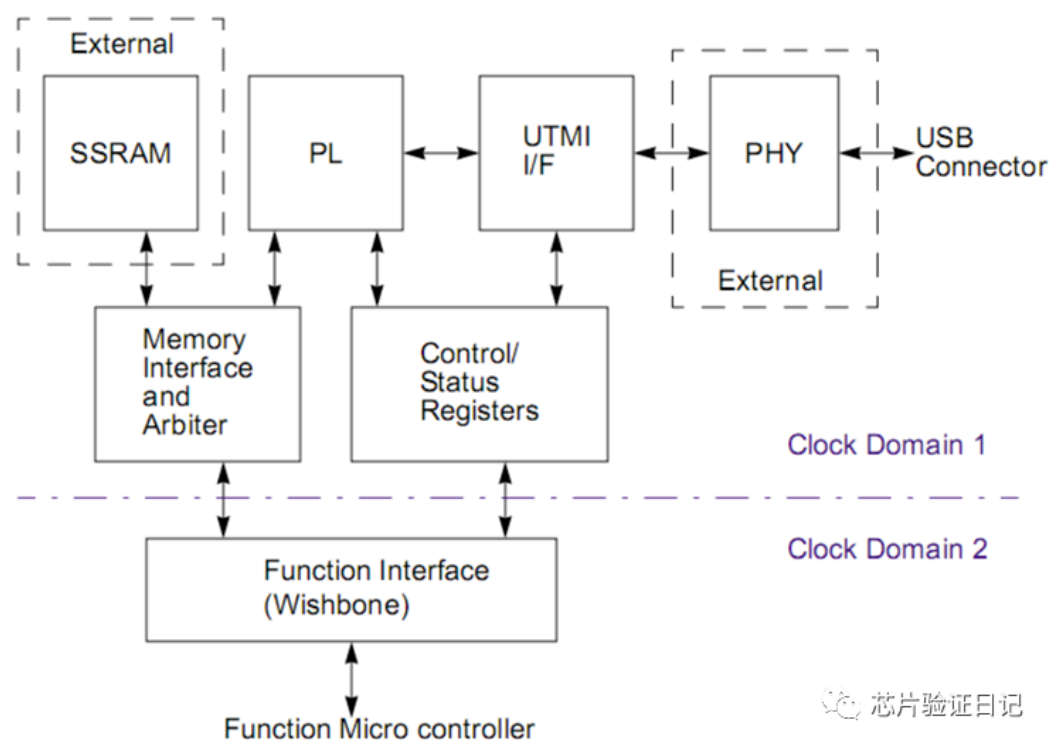
是德科技推出USB4?2.0版解決方案,優化設計性能、確保標準合規性
全新套件助力客戶快速、準確地開發和驗證用于 USB 80Gbps 產品的 USB 接口。...
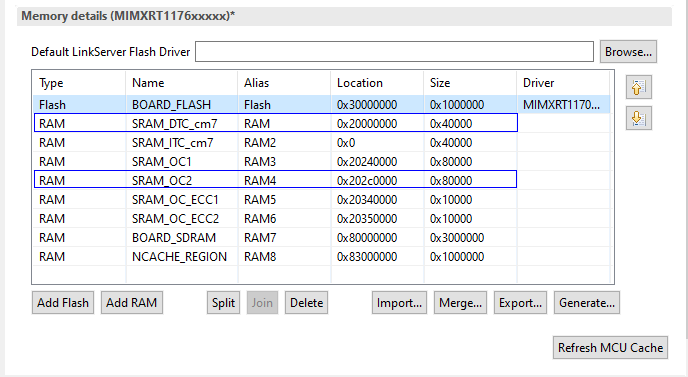
MCUXpresso IDE下將應用程序RW段分散鏈接的幾種方法
早期的 MCU 芯片,一般都會嵌入內部 Flash 和 RAM,并且 Flash 和 RAM 都只有一塊(即均在連續的映射地址范圍內),因此在鏈接應用程序時處理比較簡單,程序 RO 段全部放在單一 Flash 空間,程序...
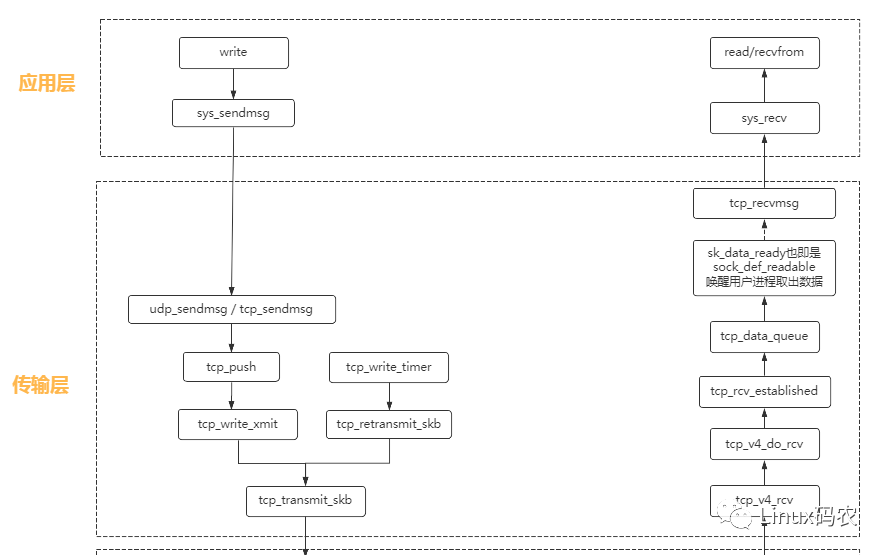
應用層如何強制發送RST報文進行斷開連接呢
在 TCP 協議中,默認情況下,當我們調用 close() 函數關閉套接口時,TCP 走四次揮手進行斷開鏈路,但是要是若緩沖區還有數據未發送到對端時,系統將嘗試把這些數據發送給對端。...
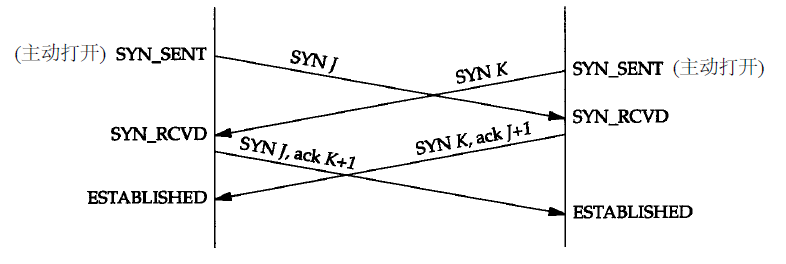
要是沒有一端進行監聽是否可以建立起TCP連接呢?
在 TCP 網絡通信過程中,我們都是先有 server 端調用 listen 監聽某個端口號,然后 client 向 server 發起連接請求,最終建立起連接。...
為什么系統會自動回復RST報文呢?
從結果中可以看到 10.223.12.10 在接收到對端回應的 syn + ack 后,系統會自動給對端回應一個 RST 復位報文,導致二者的鏈路斷開。...
如何在Linux中查看相關進程是否會出現內存增長過快的問題呢
minflt/s: 每秒一次缺頁錯誤次數(minor page faults),次缺頁錯誤次數意即虛擬內存地址映射生成物理內存地址生成的頁錯誤次數...
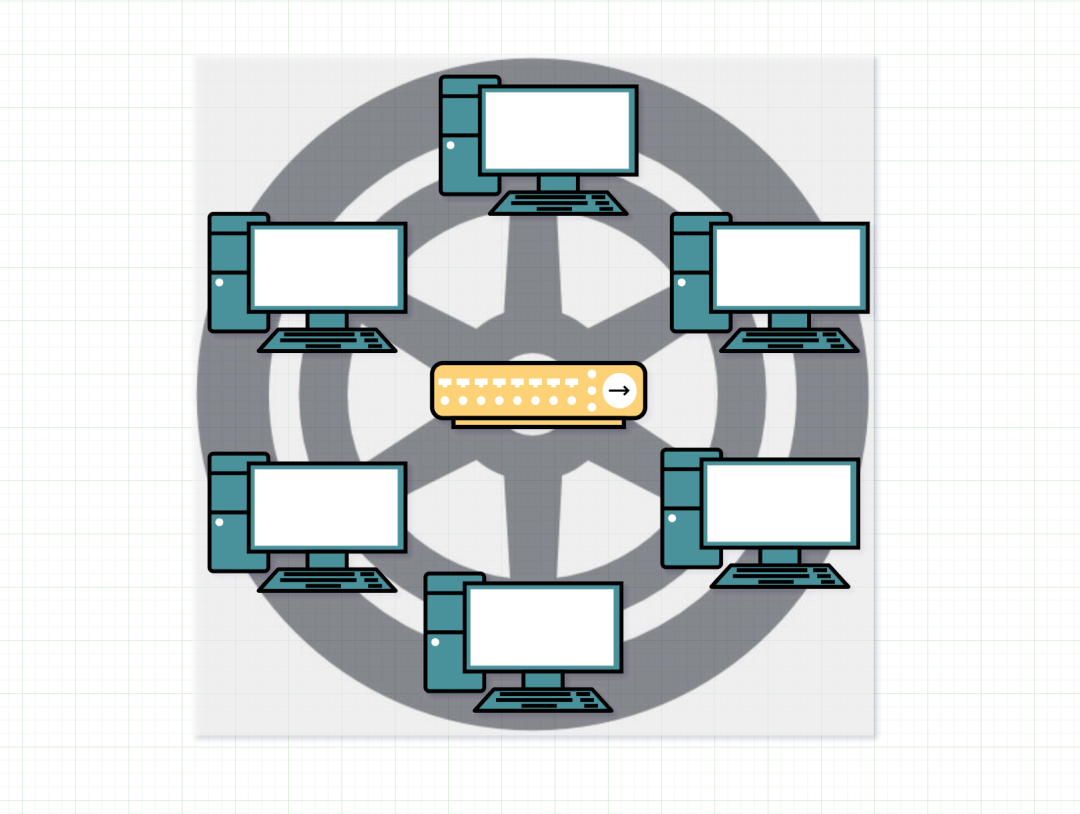
路由器與集線器及其交換機有啥區別?
所以可以理解,大家常逛的 Github,Docker Hub, 還有P**hub ,都是為了表達它們是某類資源的中心了吧。...
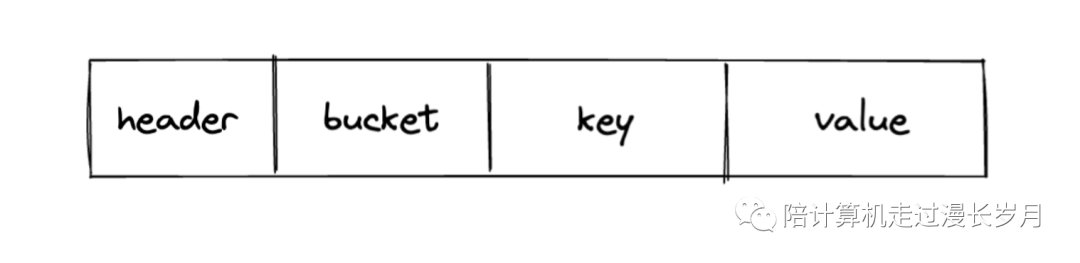
nutsdb的研究以及一些心得體會分享
根據學習老哥的描述,我首先要做的就是準備1G的數據,然后benchmark+pprof測試重啟恢復db的cpu和內存情況。...















編輯推薦廠商產品技術軟件/工具OS/語言教程專題
| 電機控制 | DSP | 氮化鎵 | 功率放大器 | ChatGPT | 自動駕駛 | TI | 瑞薩電子 |
| BLDC | PLC | 碳化硅 | 二極管 | OpenAI | 元宇宙 | 安森美 | ADI |
| 無刷電機 | FOC | IGBT | 逆變器 | 文心一言 | 5G | 英飛凌 | 羅姆 |
| 直流電機 | PID | MOSFET | 傳感器 | 人工智能 | 物聯網 | NXP | 賽靈思 |
| 步進電機 | SPWM | 充電樁 | IPM | 機器視覺 | 無人機 | 三菱電機 | ST |
| 伺服電機 | SVPWM | 光伏發電 | UPS | AR | 智能電網 | 國民技術 | Microchip |
| 開關電源 | 步進電機 | 無線充電 | LabVIEW | EMC | PLC | OLED | 單片機 |
| 5G | m2m | DSP | MCU | ASIC | CPU | ROM | DRAM |
| NB-IoT | LoRa | Zigbee | NFC | 藍牙 | RFID | Wi-Fi | SIGFOX |
| Type-C | USB | 以太網 | 仿真器 | RISC | RAM | 寄存器 | GPU |
| 語音識別 | 萬用表 | CPLD | 耦合 | 電路仿真 | 電容濾波 | 保護電路 | 看門狗 |
| CAN | CSI | DSI | DVI | Ethernet | HDMI | I2C | RS-485 |
| SDI | nas | DMA | HomeKit | 閾值電壓 | UART | 機器學習 | TensorFlow |
| Arduino | BeagleBone | 樹莓派 | STM32 | MSP430 | EFM32 | ARM mbed | EDA |
| 示波器 | LPC | imx8 | PSoC | Altium Designer | Allegro | Mentor | Pads |
| OrCAD | Cadence | AutoCAD | 華秋DFM | Keil | MATLAB | MPLAB | Quartus |
| C++ | Java | Python | JavaScript | node.js | RISC-V | verilog | Tensorflow |
| Android | iOS | linux | RTOS | FreeRTOS | LiteOS | RT-THread | uCOS |
| DuerOS | Brillo | Windows11 | HarmonyOS |



 工商網監
工商網監