電子發(fā)燒友網(wǎng)>接口/總線/驅(qū)動>
接口/總線/驅(qū)動
權(quán)威的接口/總線/驅(qū)動技術(shù)專欄,內(nèi)容有接口/總線/驅(qū)動培圳資料以及應(yīng)用知識等;涉及接口/總線/驅(qū)動的芯片、技術(shù)、設(shè)計方法和應(yīng)用文章。
IEEE802.3標準里的MDI接口協(xié)議技術(shù)
PHY與PHY之間進行通信的接口稱為MDI(Medium Dependent Interface,媒介專用接口)。...
CAN總線的終端電阻,為什么是120Ω?為什么是0.25W?
CAN總線終端電阻,一般來說都是120歐姆,實際上在設(shè)計的時候,也是兩個60歐姆的電阻串起來,而總線上一般有兩個120Ω的節(jié)點,基本上稍微知道點CAN總線的人都知道這個道理。...
RS485接口電路設(shè)計方案解析
方案分析:(1)接口及接口濾波防護電路周邊不能走線且不能放置高速或敏感的器件;(2) 隔離帶下面投影層要做掏空處理,禁止走線。...

使用MSP430啟動板在LCD上讀取和顯示RFID號碼的方式
在本教程中,我們設(shè)計了一個使用 MSP430 和 RFID 閱讀器讀取 RFID 卡的系統(tǒng)。...
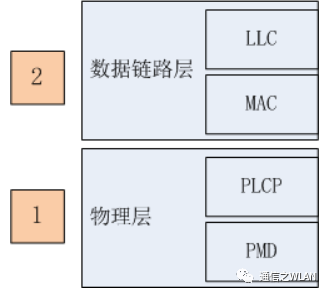
分析802.11標準在物理層的定義
OSI模型中,物理層是對數(shù)據(jù)處理的最后一個階段。802.11協(xié)議將物理層分為“PLCP子層”和“PMD子層”。...
2022-11-09 標簽:數(shù)據(jù)傳輸LLCOFDM技術(shù) 7032
基于MEB純電動車型平臺的高壓電驅(qū)動系統(tǒng)技術(shù)
電池由電池模組、BMS系統(tǒng)以及正負極高壓電池控制模塊組成。較有特色之處在于,大眾ID.4 X的正負極高壓電池控制模塊是由兩個獨立的控制器組成的,并通過Bus-Bar跨接,這也是MEB平臺下的特色...
2022-11-09 標簽:變壓器驅(qū)動系統(tǒng) 1524
汽車CAN總線滲透測試
隨著汽車智能化、網(wǎng)聯(lián)化的高速發(fā)展,對于汽車通訊網(wǎng)絡(luò)的安全威脅越來越多,而CAN總線是目前汽車使用最廣泛的總線之一,因此對汽車CAN總線網(wǎng)絡(luò)安全威脅進行滲透測試、挖掘潛在漏洞至關(guān)重...
使用關(guān)系式再生創(chuàng)建動畫是怎么做到的
點擊“工具”-“參數(shù)”,創(chuàng)建一個名稱為“STATION”的參數(shù),如下圖所示。...
2022-11-09 標簽:中斷按鍵 2217
Creo零件的默認顏色能夠修改嗎?
眾所周知,Creo默認的零件顏色如下圖所示,有的小伙伴可能會喜歡NX中零件的默認的黃色。下面我們就將Creo的默認零件顏色改為黃色。...
2022-11-09 標簽:RGB 11830

什么是浮點數(shù)?浮點數(shù)在內(nèi)存中的存儲
浮點型簡單講就是實數(shù)的意思。浮點數(shù)在計算機中用以近似表示任意某個實數(shù)。...
一文讀懂Can總線錯誤處理
為了防止故障節(jié)點干擾甚至阻塞整個CAN網(wǎng)絡(luò)系統(tǒng),CAN協(xié)議實現(xiàn)了復(fù)雜的故障限制機制。為了保證通信的正常,CAN 2.0 總線協(xié)議總線中各節(jié)點需要采取以下措施進行錯誤檢測。...
2022-11-08 標簽:CAN總線CAN網(wǎng)絡(luò)系統(tǒng) 11513
淺談PLC串口通訊和基本的通訊接口
串口是計算機上一種非常通用設(shè)備通信的協(xié)議(不要與通用串行總線Universal Serial Bus或者USB混淆)。大多數(shù)計算機包含兩個基于RS232的串口。...
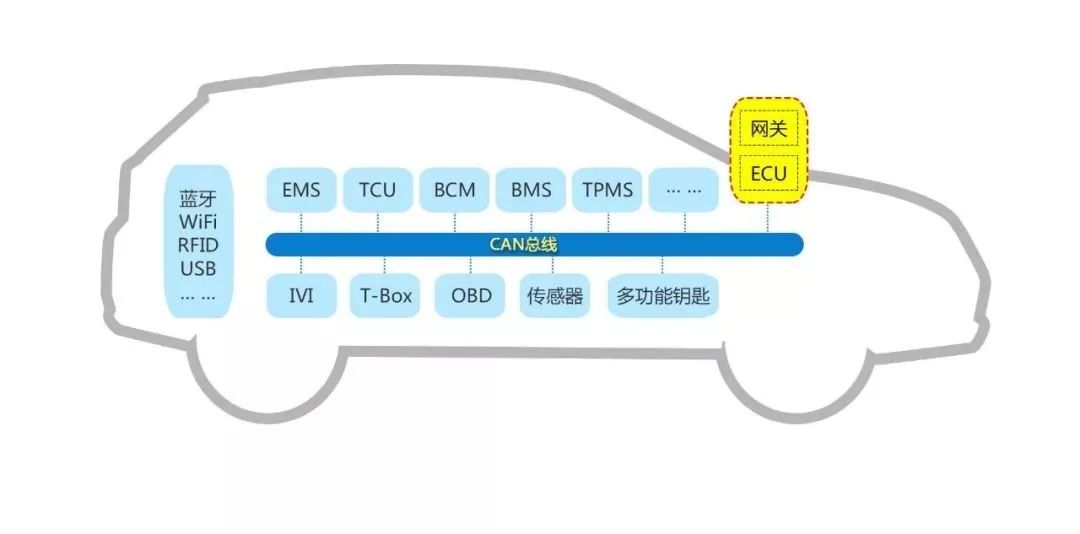
CAN在ECU通訊中的作用是什么
控制器局域網(wǎng)(CAN)于1992年就被定為了國際標準。毫無疑問,CAN是目前應(yīng)用最為廣泛的串行總線系統(tǒng),它甚至可以在一輛車上被多次使用:一個最高傳輸速率為125kbps的低速CAN總線系統(tǒng)(容錯CAN),用...
2022-11-08 標簽:CANecu總線系統(tǒng) 3175
一體式同軸多檔電驅(qū)動橋技術(shù)應(yīng)用
一體式電驅(qū)動橋由電機、減速器、電機控制器、橋管、半軸及制動器等部件構(gòu)成,可以取代傳統(tǒng)汽車的發(fā)動機、變速箱、傳動軸和驅(qū)動橋,是一種全新汽車驅(qū)動橋。...
淺析CAN總線終端電阻的作用
CAN總線有“顯性”和“隱性”兩種狀態(tài),“顯性”代表“0”,“隱性”代表“1”,由CAN收發(fā)器決定。下圖是一個CAN收發(fā)器的典型內(nèi)部結(jié)構(gòu)圖,CANH、CANL連接總線。...
2022-11-08 標簽:CAN總線 1484
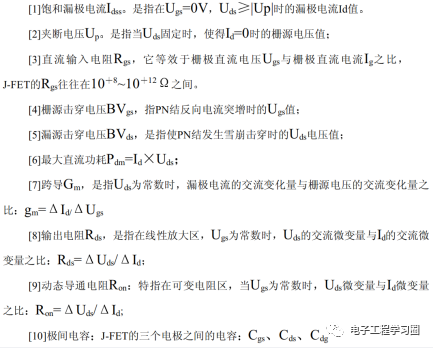
來說說J-FET的實際使用注意事項
該模型可用于小信號電路計算,其中,極間電容在低頻和直流電路中可以忽略。Rgs是J-FET的柵源等效電阻,當(dāng)加了正常直流偏置電路后,柵源之間外接的電阻比Rgs小得多,計算時可以忽略不計。...
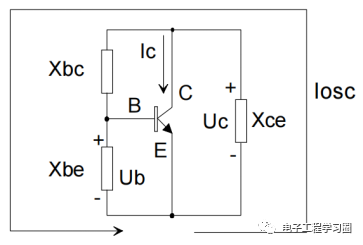
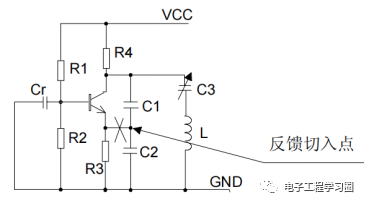
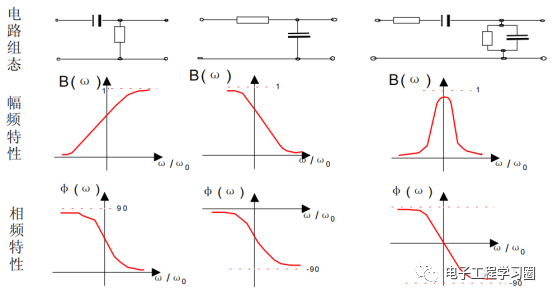
實際電路設(shè)計中常用的三點式LC振蕩器
三點式LC振蕩器的本質(zhì)為:由三極管構(gòu)成的單管放大器+LC選頻反饋網(wǎng)絡(luò),在正確的組態(tài)下,兩者共同構(gòu)成振蕩器回路。...
介紹兩種將可變電容換成變?nèi)荻O管的LC振蕩器
因此,有源器件接入僅影響振蕩回路很小一部分,振蕩回路有穩(wěn)定的電壓反饋比,那么,在調(diào)節(jié)振蕩頻率時,電路不易停振。...
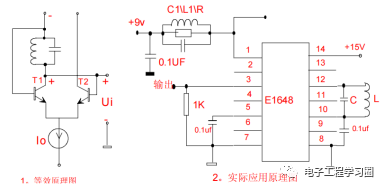
簡單介紹單片集成振蕩器E1648
振蕩器起振后,因為電路的正反饋,振蕩幅度不斷增加,差分放大器的跨導(dǎo)不斷減小,差分放大器的放大倍數(shù)不斷減小,振蕩幅度的增加變慢,最終晶體管進入截止區(qū),幅度增加到最大而穩(wěn)定下...
實際電路中應(yīng)用最廣泛的RC正弦波振蕩器
RC、LC反饋振蕩器的最大區(qū)別是振幅的穩(wěn)定機理,LC振蕩器利用器件的非線性穩(wěn)幅,但RC振蕩器不允許有源器件進入非線性區(qū),若器件進入非線性區(qū)后RC負反饋的效果就會減小,電路振蕩不穩(wěn),輸...
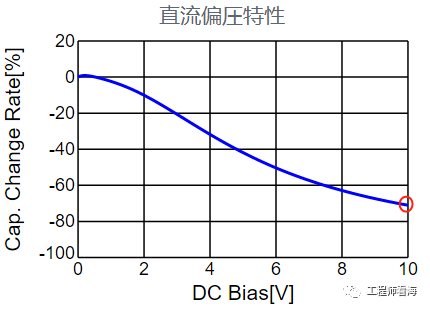
MLCC陶瓷電容6大特性參數(shù)知多少?
下圖是10uF的電容GRM319B31A106KE18偏壓特性,在電壓為10V時有效容值降低了近70%,只有大約3uF。...
2022-11-03 標簽:MLCCESR陶瓷電容串聯(lián)電感 8837
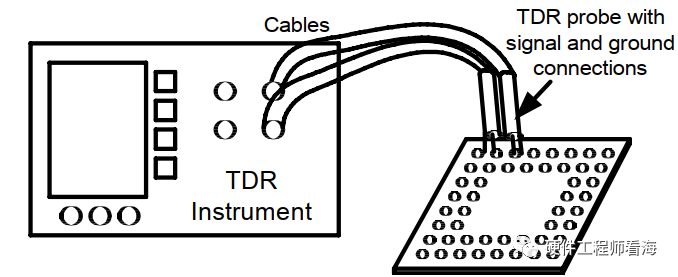
TDR測量的基本原理與應(yīng)用
這里額外介紹下,在使用示波器測量信號時,如果使用了較長的地線,會使得測量鏈路中環(huán)路電感增加,發(fā)生諧振,也會引起震蕩,使得測試不準確,因此在測量要求比較嚴格時,要使用接地彈...
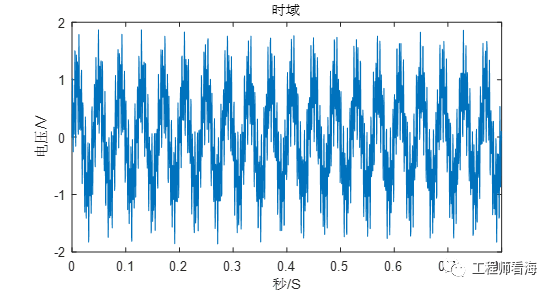
舉例介紹下FFT與PWM的應(yīng)用
PWM是脈沖寬度調(diào)制的意思,占空比D是高電平持續(xù)的時間/周期,占空比越小,PWM信號越窄;反之,PWM信號就越寬。...
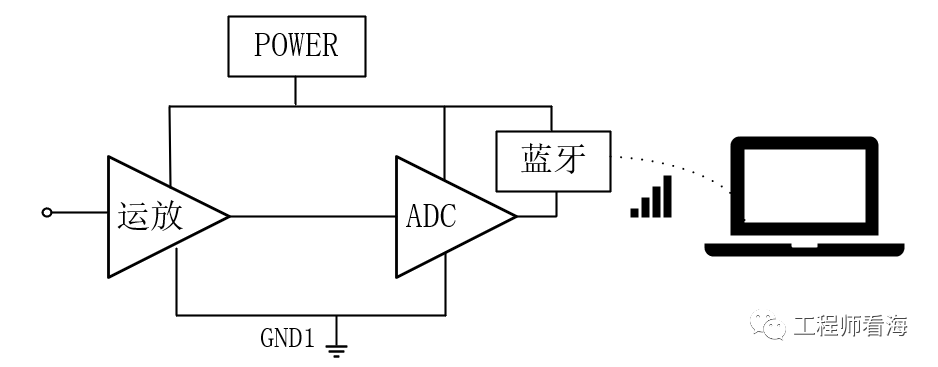
關(guān)于CC2640藍牙干擾模擬信號采集的問題
先測試了模擬電源的紋波,受限于示波器精度,只能分辨10mV,沒發(fā)現(xiàn)異常,但這并不代表電源就是ok的,需要進一步排除。...
2022-11-03 標簽:BUCK模擬信號ADC轉(zhuǎn)換器CC2640 3342

通過傅里葉變換來評估信噪比
信噪比(SNR)是信號與噪聲的比率,它是衡量通信或模擬系統(tǒng)性能的重要指標之一,與傅里葉變換更是有千絲萬縷的聯(lián)系。...
典型CAN的基本原理總結(jié)分析
CAN通訊協(xié)議ISO-11898:2003標準介紹網(wǎng)絡(luò)上的設(shè)備間信息是如何傳遞的,以及符合開放系統(tǒng)互聯(lián)參考模型(OSI)的哪些分層項。...
2022-11-03 標簽:收發(fā)器CANCAN控制器CAN收發(fā)器 1875
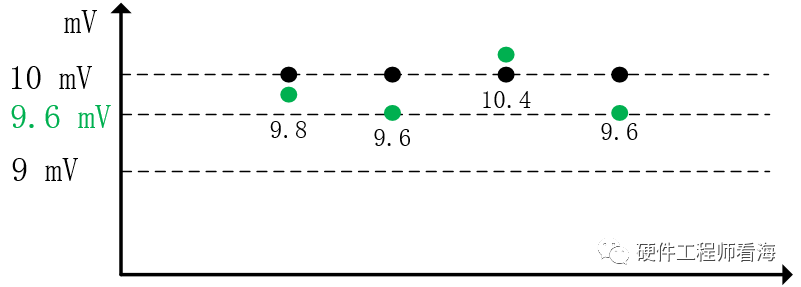
直觀感受過采樣的原理
對疊加噪聲后的信號進行4次采樣,理論上應(yīng)該得到[9.8, 9.6, 10.4, 9.6]4個離散的樣本點,而受到ADC分辨率的限制...

為什么過采樣率每提高4倍可以提高ADC 1bit的有效分辨率?
如果使用數(shù)字濾波來濾除帶寬BW以外的噪聲成分,則等式中還要包括一個校正系數(shù)...
對坦克300的CAN總線數(shù)據(jù)采集
個比方,如果把CAN總線舒適系統(tǒng)比作一列火車,CAN驅(qū)動系統(tǒng)總線看成一列快車,相互傳輸?shù)腃AN數(shù)據(jù)看成旅客,則旅客要想換乘動車或者快車,需經(jīng)過站臺,那么站臺就是網(wǎng)關(guān)(Gateway)。...















編輯推薦廠商產(chǎn)品技術(shù)軟件/工具OS/語言教程專題
| 電機控制 | DSP | 氮化鎵 | 功率放大器 | ChatGPT | 自動駕駛 | TI | 瑞薩電子 |
| BLDC | PLC | 碳化硅 | 二極管 | OpenAI | 元宇宙 | 安森美 | ADI |
| 無刷電機 | FOC | IGBT | 逆變器 | 文心一言 | 5G | 英飛凌 | 羅姆 |
| 直流電機 | PID | MOSFET | 傳感器 | 人工智能 | 物聯(lián)網(wǎng) | NXP | 賽靈思 |
| 步進電機 | SPWM | 充電樁 | IPM | 機器視覺 | 無人機 | 三菱電機 | ST |
| 伺服電機 | SVPWM | 光伏發(fā)電 | UPS | AR | 智能電網(wǎng) | 國民技術(shù) | Microchip |
| Arduino | BeagleBone | 樹莓派 | STM32 | MSP430 | EFM32 | ARM mbed | EDA |
| 示波器 | LPC | imx8 | PSoC | Altium Designer | Allegro | Mentor | Pads |
| OrCAD | Cadence | AutoCAD | 華秋DFM | Keil | MATLAB | MPLAB | Quartus |
| C++ | Java | Python | JavaScript | node.js | RISC-V | verilog | Tensorflow |
| Android | iOS | linux | RTOS | FreeRTOS | LiteOS | RT-THread | uCOS |
| DuerOS | Brillo | Windows11 | HarmonyOS |



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)